
Abstract
Multi-antenna receivers are a key technology for modern communication systems. Signal attenuation in the very low frequency (VLF) channel is a serious problem. In addition to high signal attenuation, the resulting noise on the VLF channel is non-Gaussian. Hence, to analyze and address the issue of the normal operation of the multi-antenna receiver in the VLF channel, we must study the signal detection problem in a multi-dimensional non-Gaussian fading channel. Motivated by the existing blind receiver in an underwater submarine single-antenna receiver, we study the signal detection and estimation algorithm under the fading channel for a multi-dimensional non-Gaussian noise model. In this study, we propose a blind receiver based on the expectation-maximization (EM) algorithm. The proposed blind receiver can reduce non-Gaussian noise. In addition, we propose a nonlinear receiver that can accurately receive the transmitted signal over the high-attenuation VLF communication systems. Numerical and simulation results over uncorrelated and correlated non-Gaussian channels confirm that the design of the proposed blind receiver is close to optimal, with low computation complexity.
Keywords
Introduction
Very low frequency (VLF) of 3–30 kHz is a sufficient frequency band for underwater communications and navigation. 1 VLF is mainly used in submarine communication, and it has a relatively large skin depth to diffuse in the conductive water. 2 VLF is used in one-way communication between a base station and a submarine. VLF is also used in remote sensing applications, 3 to collect continuous observation signals for the coverage areas. Such remote sensing observations can be performed using several models, such as the Long-Wave Propagation Capability (LWPC) program and Modefinder. 3 The application of such schemes is based on the ionospheric state and properties of the analyzed disturbances that affect the possibility of using approximation or empirical formulas. In general, the 3–30 kHz VLF has been used in early wireless telegraphy, navigation beacons and time signals, geophysical and atmospheric measurement, and military communications such as submarine communications.
In the early (1905–1925) era of wireless telegraphy, the VLF band was used for achieving long-distance communication. The era of telegraphy was based on high-power networks of low and very low frequency. Such networks were designed to use radiotelephony by employing amplitude modulation and single-sideband modulation within the band starting at 20 kHz. Due to the long communication range provided by the VLF, as well as its stable phase characteristics, the VLF band has been used for long-range hyperbolic radio navigation systems used by ships and aircrafts to determine their geographical position by comparing the phase of radio waves received from fixed VLF navigation beacon transmitters. The worldwide Omega system used frequencies from 10 to 14 kHz. In geophysical and atmospheric measurements, the VLF band is employed by geophysicists for investigating long-range lightning position as well as phenomena such as the aurora. Measurements of whistlers are used to deduce the physical properties of the magnetosphere. Geophysicists use the VLF-electromagnetic receivers to evaluate conduction near the Earth’s surface. VLF transmitters are used in military submarine applications. Due to their long-range and high dependability, it is expected that in a global war, VLF communications will be less interrupted by explosions than higher frequency communications. Because it can infiltrate ocean water, VLF is used by the navy to communicate with submarines near the surface.
In this study, we propose a blind receiver design based on a multi-dimensional stable distribution model using the Expectation-Maximization (EM) algorithm for submarine communications. The concept is that the blind receiver will reduce the complexity of the underwater submarine receiver under uncorrelated noise.
Multi-antenna receiving technology4–10 can improve the receiver performance, particularly in VLF communication channels. The multi-antenna receiver in a submarine can overcome the single-antenna’s poor receiving capability. In addition, to achieve the best communication reception, the receiver often needs to estimate the channel parameters in advance, and then, the signal can be demodulated by equalization using the estimated channel parameters, particularly in the case of non-Gaussian noise. One estimation method is blind receiving technology, which obtains an optimal signal through the use of training sequences to estimate the channel and reduce the interference. However, due to its high computational complexity and significant hardware requirements, blind receiver detection still requires much research.
In multi-antenna receiving technology, the noise is often assumed to be a multi-dimensional Gaussian model, which is acceptable in the high-frequency channel. However, in the VLF channel, the noise distribution has the characteristics of a heavy tail and is significantly non-Gaussian.11–15 Such non-Gaussian noise consideration is due to the influence of atmospheric thunder and lightning. To achieve optimal reception in submarine multi-antenna communications, it is necessary to study multi-antenna receiving technology in a non-Gaussian noise environment.
The multi-dimensional mixed Gaussian model and the multi-dimensional stable distribution model are commonly used as multi-dimensional non-Gaussian noise models. They can be regarded as weakened forms of Class A and Class B in the multi-dimensional Middleton noise model, 16 respectively. For signal detection under these two types of models, studies17–19 have often focused on the structure of the receiver under known parameters. This type of receiver often requires a reserved training sequence to estimate the channel parameters, but in practice, particularly in the VLF channel, this method theoretically cannot achieve good performance due to the low communication rate and the fluctuation of channel parameters. Therefore, the channel parameters estimated using the training sequence may not be suited for subsequent signal estimation. Hence, blind non-Gaussian receivers can be incorporated in such communication systems. The blind non-Gaussian receivers can jointly estimate channel parameters and signals, with performance closer to the actual needs.
Ilow and Hatzinakos 20 explained the relationship between the spherically isotropous symmetrical alpha-stable model 21 and the radio frequency interference created by a Poisson distributed field of interferers. In this research, the authors presume that every receiver is bordered by the same place of effective interferers and ignored the split receiver. The spherically isotropic alpha stable model is obtained under both uniform and non-uniform interference distribution that incorporates pathloss, lognormal shadowing, and Rayleigh fading. Unfortunately, this research is restricted to baseband signaling and ignored any correlation between the interferer and the antenna receiver. Delaney 22 proposed a new model as an extension of class A distribution, which was found to be useful in analyzing multiple-input multiple-output (MIMO) receivers. 23 Unfortunately, the multi-antenna receiver proposed in previous studies is less than ideal, as it is closely limited to two antenna receivers, 24 and it requires numerical dependency among those receivers.
Herein, considering that the receiver is usually a narrowband receiver in practice, we propose a blind receiver with a multi-dimensional stable distribution model based on the EM algorithm. The proposed receiver considers correlated channels as well as uncorrelated channels. To deal with the detection problem under correlated noise channels, we propose a multi-dimensional blind receiver under the distributed noise of a correlated channel. To improve the receiving model under multi-dimensional correlated noise channels, we also derive an EM algorithm with blind signal detection in uncorrelated noise channels. Simulation experiments show that the proposed blind detector has fast iteration convergence with robustness, and its low bit error rate approximates the bit error rate performance of the optimal receiver with known parameters.
The main contributions in this study can be summarized as follows:
This study proposes a blind receiver with a multi-dimensional stable distribution model. To achieve acceptable performance in a VLF multi-antenna receiver, a multi-dimensional non-Gaussian noise fading channel is studied under correlated and uncorrelated channels.
In this study, the EM algorithm is derived specifically to improve the proposed blind receiver performance over the VLF channel. The blind receiver problem is simplified by introducing additional data or hidden parameters.
Simulation experiments show that the blind detector has low computation complexity with robustness, and its bit error rate performance is nearly the same as that of the optimal receiver under the condition of known parameters.
The rest of this paper is structured as follows: Section “System model and formulation of the problem” presents the system model. Section “Proposed method” presents the proposed EM algorithm under uncorrelated and correlated channels. Section “Simulation and discussion” discusses the simulation. Section “Conclusions” presents the authors’ conclusions.
System model and formulation of the problem
In this section, we will discuss the multi-antenna receiver over correlated and uncorrelated channels, as well as the operation and performance of the multi-antenna receiver over these channels.
System model under the uncorrelated channel
We considered a multi-antenna receiver equipped with

where

where

and

Therefore, we have

According to the definition of sub-Gaussian distribution, each dimension of the random variable subject to sub-Gaussian distribution has the same parameter
System model under the correlated channel
The correlated channel assumptions in this study are as follows. First, we assume that there is a received antenna in a multi-antenna receiver, and the
Let

where

where

where

and

Proposed method
The EM algorithm30–32 is a common maximum likelihood estimation method. It is very effective in estimating the potential probability distribution under incomplete data. It is often very difficult to use the Newton method and other methods,33–35 but the EM algorithm is intuitive. The EM algorithm consists of two steps at each iteration: solving the expectation (E-Step) and solving the maximum value (M-Step). First, there are indeed missing values in data due to limited observation conditions. Second, because it is difficult to directly solve the likelihood function, additional data or hidden parameters are introduced to simplify the problem. This article focuses on the second EM category.
EM algorithm under uncorrelated channels
Overall EM steps under uncorrelated channels
Consider

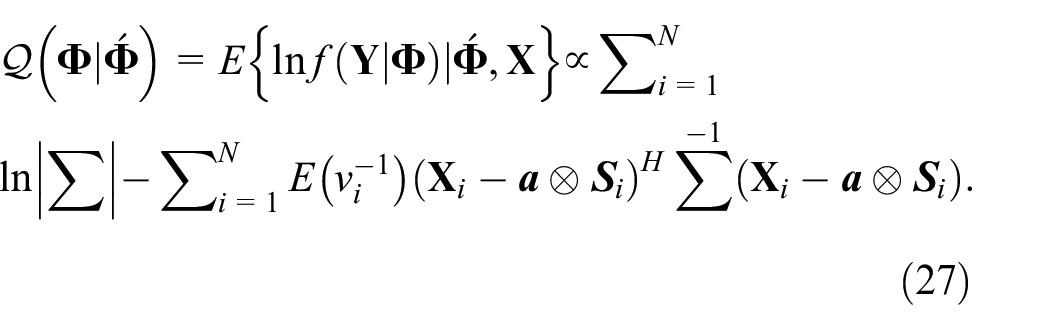
By evaluating the logarithm of equation (11), we obtain
The EM algorithm maximizes
E-Step:
M-Step: solve
where
In the M-Step, it is necessary to solve
E-Step: Solve
M-Step: Fixed
E-Step:
M-Step: Fixed
E-Step: Solve
M-Step: Fixed
E-Step
The main task of the E-Step EM algorithm is calculated by

The expression in equation (14) is complicated, and the stable distribution does not have the probability density of the closed-form; so, it is difficult to obtain

where
Because the

Therefore,
Sample at
Sample based on a uniform distribution
If
However, rejection sampling has one drawback: when the probability of rejection is too large, random number generation will be prohibitively slow. Therefore, importance sampling is used here. For

where
Generate
Calculate the weight of importance
Calculate
M-Step
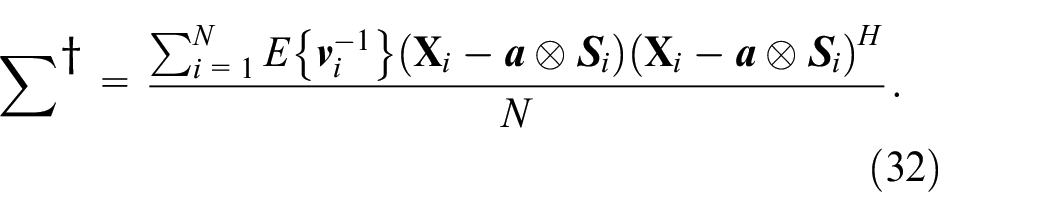
The M-Step is used to estimate the value of ∑,
To estimate the value of the Hermitian matrix ∑, we need to solve

Then, the new estimation ∑ is given by

To estimate the channel fading coefficient

According to the nature of the conjugate gradient,

Therefore, we have
In the above formula, * represents a conjugate operator. Therefore, the new estimate of

For
Proposed EM algorithm under correlated channels
Overall EM steps under correlated channels
The received data

where

The EM algorithm maximizes
The main steps are:
E-Step:
M-Step: Solve
Because
E-Step: Solve
M-Step: Fixed
E-Step: Solve
M-Step: Fixed
E-Step: Solve
M-Step: Fixed
E-Step
The calculated E-Step is similar to that in Section “EM algorithm under uncorrelated channels.” However, because the system model condition in this section is under the correlated noise channel, for the sake of completeness, the calculation of

Similarly, using the Monte Carlo method to solve

Therefore,
Generate
Generate

(3) If
Furthermore, when the rejection probability is too large, the rejection sampling algorithm is time-consuming. Therefore, the following importance sampling algorithm can also be used:
Generate
Calculate the weight of importance as
Calculate

where
M-Step
As in Section “M-Step,” the M-Step is used to estimate the value of ∑,
Let

where

We also obtain

Furthermore, in order to solve according to the nature of the conjugate gradient, we can obtain the channel fading coefficient

Finally,

Simulation and discussion
To test the performance of the receiver described in Section “Proposed method,” a simulation experiment was conducted over the correlated and uncorrelated channels. The underwater channel was considered uncorrelated in this simulation due to the underwater ambient noise and propagation features of the uncorrelated ambient noise. It was observed that, when
In the simulation, we first tested the iterative performance of the estimator. In the measured atmospheric noise, the value of
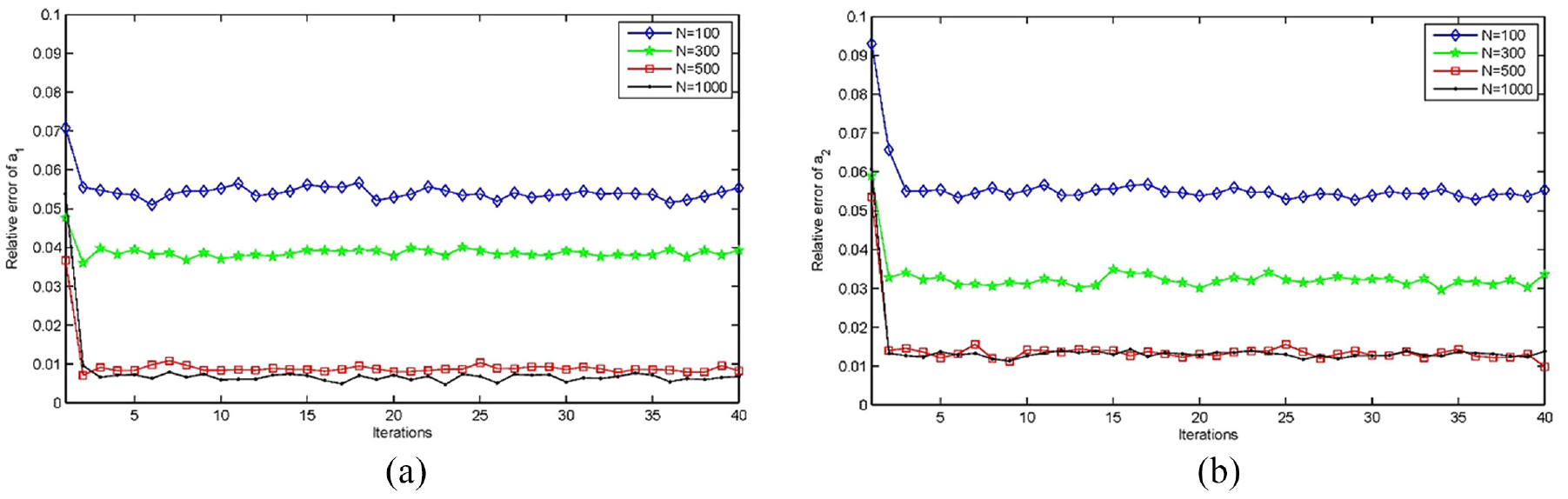
(a) Iteration convergence performance of a1 and (b) Iteration convergence performance of a2.

Iteration convergence performance of Σ (we use Σ(1,1) and Σ(1,2) as examples): (a) iteration convergence performance of Σ(1,1) and (b) iteration convergence performance of Σ(1,2).
Based on Figures 1 and 2, the iterative convergence rate of the estimation period is rapid, and the convergence can be achieved within five iterations. In addition, we compared the iterative performance of the estimator under a different number of symbols. When increases were from 100 to 300 and from 300 to 500, and then for 100 times, the estimated results were averaged, as shown in Table 1. It can be seen that the parameter estimation results become increasingly accurate as the number of symbols increases. As shown in Table 2, the normalized standard deviation of estimated parameters is compared in 100 simulation experiments. The normalized standard deviation is defined as follows:

As shown in Tables 1 and 2, with the continuous increase of the symbols
Mean of the estimates.

Normalized sample standard deviation of estimated parameters.

The bit error rate (BER) evaluation for the proposed blind receiver is an important metric, and it was tested through the simulation channel. In this simulation experiment, we set the parameter condition as
BER performance of optimum receivers and blind receivers with
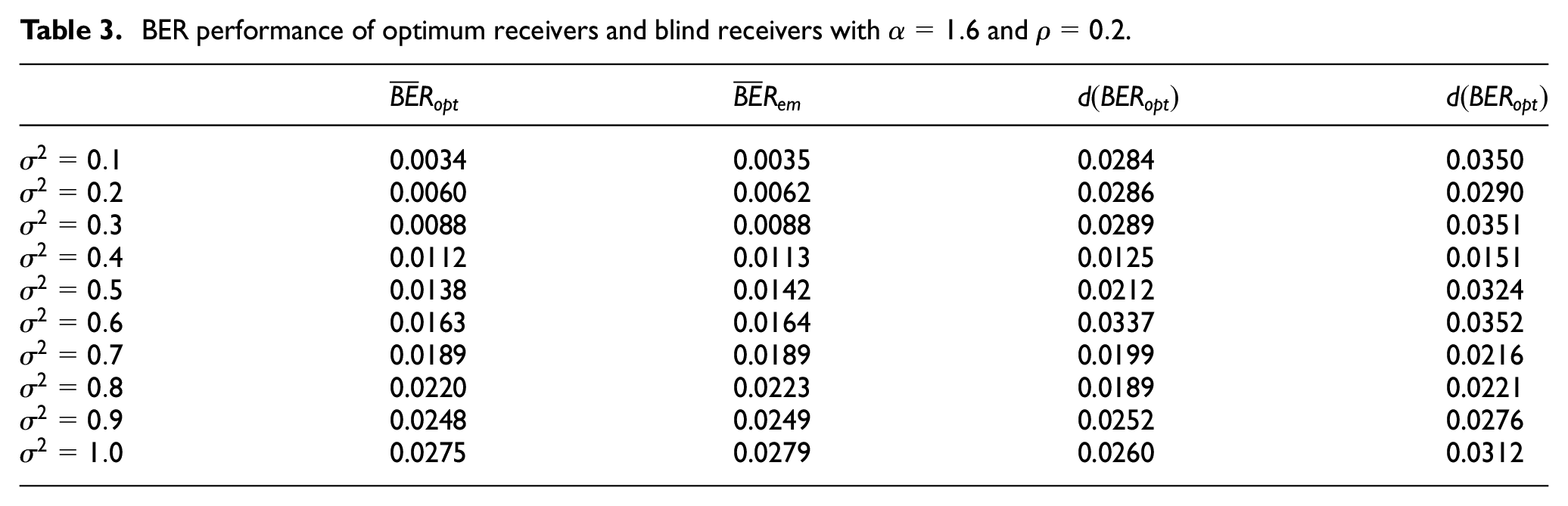
Table 3 lists 10 sets of simulation results for
It can be seen from Table 3 that the BER performance for the proposed blind receiver very closely approximates the BER performance of the optimal receiver. The normalized standard deviation is also small, which is mainly due to the robustness of the EM algorithm. Figure 3 shows the comparison of the performance for the optimal receiver and the blind receiver at

Performance of optimum receivers and blind receivers with
As shown in Figure 3, the performance of the blind receiver approaches that of the optimal receiver under the different values of
Conclusions
Due to the possible correlation between the sampling noise vector and the noise vector during the transmission of symbols, we propose a blind receiver based on a multidimensional stable noise distribution channel. The proposed blind receiver addresses the problem of signal detection under a correlated noise channel. An EM algorithm is derived for a multidimensional correlated noise channel, in particular, for blind signal detection in uncorrelated noise channels. Simulation results show that the proposed blind detector has fast iterative convergence with robustness, and the BER performance of the proposed blind receiver can approximate the optimal receiver’s BER performance under given parameters.
Footnotes
Acknowledgements
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (61671394, 61971362), and the National Key R&D Program of China (2018YFC0809200).