
Abstract
The aim of this paper is to compare the static and dynamic performances of two types of herringbone grooved journal bearings (HGJBs), that is, pumping-out HGJB and pumping-in HGJB. Firstly, based on finite control volume method and the principle of flow balance, an equivalent Reynolds equation considering the turbulence effect is derived. Then, the journal motion considering angular displacement is analyzed with linear perturbation method. The equivalent Reynolds equation is linearized into static-form one and perturbed-form ones. These equations are solved by finite difference method and their solutions are integrated on the bearing surface to determinate the static characteristics and dynamic coefficients of HGJB. Additionally, the critical mass and critical whirl frequency are defined for evaluating the stability and rigidity of bearing by solving a motion equation with four degree of freedoms (DOFs). Finally, the static and dynamic characteristics of two types of HGJBS are analyzed and compared symmetrically in consideration of effects of eccentricity ratio, length to diameter ratio, groove angle, groove depth, the width of sealing damp, tilting degree of journal, and rotation speed. The results show that, within the interested range of investigated parameters, static performances of pumping-out HGJB are superior to that of pumping-in HGJB generally. Stability of pumping-in HGJB is better than pumping-out HGJB but bearing rigidity of pumping-in HGJB is inferior to pumping-out HGJB.
Introduction
Herringbone grooved journal bearing (HGJB), as a promising self-acting bearing design, has the characteristics of the compact structure, low friction power loss, high stability, etc. 1 HGJBs, commonly lubricated by oil, air, or water, can meet the supporting requirements for various rotary equipment. Uniquely, HGJB also owns the pumping characteristics by aid of the inherent herringbone-like grooves. To date, HGJB has been successfully used in a variety of applications, for example, laser scanner motor, 2 turbo compressors, 3 gyroscopes, 4 turbochargers, 5 and the storage media 6 and seals. 7
Due to the growing application scenarios of HGJB, massive researchers devoted to studying the performance of HGJB. In aspect of theoretical calculation, many mathematical models have been developed. Early, due to the restriction of computing power, the narrow groove theory (NGT)8–10 was presented and used widely to study the performance of HGJB. Specially, NGT is the preferrable choice in optimization design of HGJB applications due to its high computational efficiency.3,11 However, NGT fails to receive a satisfying calculating accuracy in the cases of large eccentricity and a small number of grooves. 10 Alternatively, a few numerical methods involving the finite-element method, 12 finite difference method,13–15 and boundary element method 16 become the popular analysis methods for HGJB. More recently, some researchers employ computational fluid dynamics (CFD) technique to perform a detailed study of three-dimentional flow, temperature and pressure field for HGJB.17–19 In addition, some advanced lubrication models considering cavitation effect, 20 thermal effect, 21 inertia effect, 22 turbulence effect, 23 misalignment effect,24,25 and texture effect 26 have also been established for various HGJB solutions.
In aspect of structural researches, numerous studies also have been conducted for fully developing the potential of HGJB performances. For example, Kawabata et al. 27 proposed a new type herringbone grooved journal bearing, which enable to produce an oil film bearing pressure with a shaft or bearing rotation in either direction. Yen and Chen 28 studied to use reversible elliptical grooves on a journal bearing (Rev-EGJB), and compared its characteristics with those of the Rev-HGJB. The comparison shows that the introduced Rev-EGJB exhibits a higher load capacity and a lower power loss than the Rev-HGJB. Chen et al. 29 investigated the design and characterization of a miniature fluid dynamic bearing using novel multi-step elliptical grooves for small-form-factor data storage applications and miniature fan motors. Nemat-Alla et al. 1 experimentally investigated the static and dynamic characteristics of the beveled-step HGJBs and discussed the merits as well as the demerits of the groove profile of beveled-step HGJBs through comparisons with plain journal bearings. Some advanced optimization techniques30,31 were also developed for the design and optimization of groove configurations.
The above studies have provided a comprehensive understanding on the lubrication behavior of HGJBs. From those published literatures, HGJBs considered in those studies were almost inwardly pumping, that is, pumping-in HGJB. This style of HGJB absorbed the lubricant from outside of bearing ends into bearing clearance and produce a pressure peak near the bearing midplane. This form of HGJB is fairly common in air-lubricated HGJB and they are always in small size. As to hydrodynamic version, pumping-in HGJB, due to its inwardly pumping characteristics, is used in seals or lubricant-self-replenishing rotor-bearing system such as HDD spindle, 32 and they are also small-size or runs at relatively low speed. For the aforementioned applications, bearing temperature rise is low and acceptable due to low viscosity of lubricant or low running speed. However, when bearing size is large and operate at high speed, temperature rise of hydrodynamic bearing induced by film shear become prominent. Because both inflow and out flow of lubricant go through the bearing two ends, bearing overheat may occur in pumping-in HGJB due to the following two facts: (1) a small flow rate due to a longer flow path; (2) the inescapability that the heated lubricant just flowing out of bearing join the new lubricant and enter into the bearing clearance again. Further, this is especially true for HGJB with large bearing length. To address this issue, a circular groove may be machined in the midplane of bush to guide the lubricant flow flowing out of bearing midplane instead of bearing ends, as shown in Figure 1(a). This bearing design may significantly change the bearing performance. Alternatively, pumping-out HGJB design, as shown in Figure 1(b), may be another solution. In pumping-out HGJB, the lubricant is fed to the bearing midplane and then flow out from bearing ends. To the authors’ best knowledge, little researches focus on studying the performance difference of these two types of hydrodynamic HGJBs. Therefore, it is necessary to conduct a comparative study on the static and dynamic characteristics between pumping-in and -out HGJB. Since the consideration of the high-speed operation condition and large bearing length, the turbulent effect of lubricated flow and bearing tilting effect should be included in HGJB model.

Geometrical configurations of two types of HGJBs: (a) pumping-out version and (b) pumping-in version.
In this paper, a 4-DOFs dynamic model for high-speed water-lubricated HGJB is developed, in which both the journal tilting effect and turbulence effect are considered. The 4-DOFs motion equation is solved to evaluate the stability and rigidity of HGJB. Based on the established model, static and dynamic characteristics are analyzed and compared. The influence of operating conditions and configuration parameters on the performances of two types of HGJBs is investigated systematically.
Lubrication equation
Figure 1 shows two typical types of HGJBs. With the assumptions of incompressible, isoviscous and isothermal flow, and neglecting fluid inertia effects and considering turbulent effects, the Reynolds equation suited for HGJB in θ-z coordinates is

where turbulent factors
In the engineering application, herringbone grooves are usually inscribed on the journal for convenient processing. In this case film thickness is described by an inertial frame

where

where

where subscript

(a) Coordinate system of HGJB and (b) schematic diagram of coordinate transformation.

Inflow and outflow of mass in finite control volume.
When HGJB is perturbed around the equilibrium position

where


Geometrical relationships between the film thickness and translational and rational motion of HGJB: (a) xoy plane, (b) yoz plane, and (c) xoz plane.
The pressure in fluid film due to perturbed motion can be expanded into the sum of static pressure and dynamic pressure change:

where p0 represents static pressure.
Substituting equations (5) and (7) into equation (2) yields static-form and perturbed-form of the equivalent Reynolds equation:

where subscript 0 denotes the static state and χ denotes perturbed state. The detailed expression of all components of mass flow rates can be found in Appendix 2.
The following boundary conditions are adopted by equation (8):
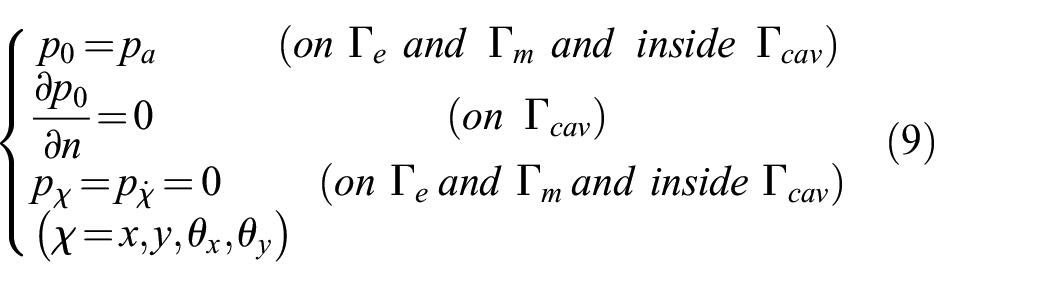
where
Equation (8) with boundary conditions of equation (9) is discretized by the finite difference method and solved by the successive over relaxation (SOR) iteration method.
35
Solutions of equation (8) are the static pressure
Static-state performance
With the obtained static pressure distribution

The side-leakage volume flow rate of the bearing can be written as:

The friction loss of bearings can be determined as follows 34 :

Where
It is assumed that the heats generated by lubricant film shearing is totally carried away by lubricant flow, the temperature rise of lubricant film can be expressed as follows 34 :

where
Dynamics coefficients
With the obtained displacement-perturbed pressure


Stability analysis
A symmetric balanced rigid rotor supported horizontally by two identical HGJBs on both ends is considered, as shown in Figure 5. The inertial parameters of rotor

where

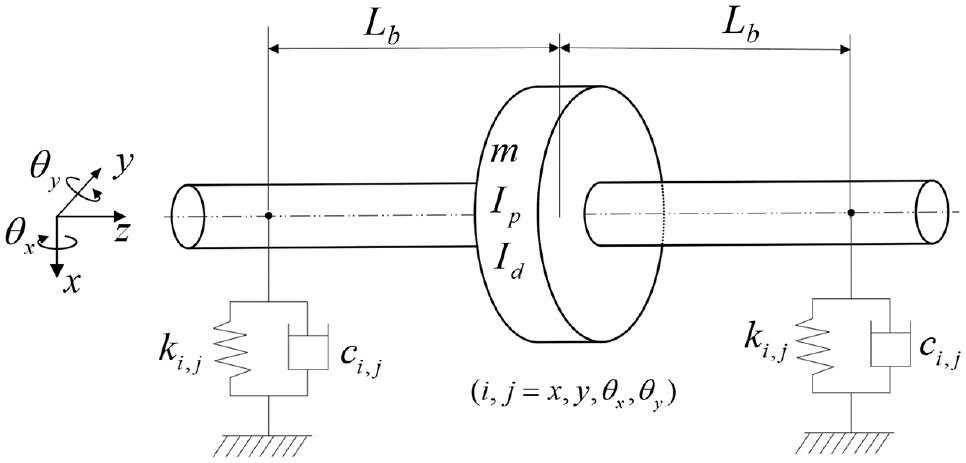
Dynamic model of rotor-bearing system.
The radius of gyration is introduced to express the mass moment of inertia with respect to the mass,
25
that is,

The motion of the rotor is stable for


If neglecting the DOF of
Result and discussion
A computational program is developed based on MATLAB R2020a to calculate the static and dynamic characteristics of a HGJB. The solution process expressed in flow chart is shown in Figure 6. To validate the developed bearing procedure, a detailed comparison among the present results and the experimental data of Hirs 37 for load carrying capacity is shown in Figure 7(a). The same parameters with Hirs’s experiment are used in simulation: both of width and diameter of bearing are 40mm; bearing clearance is 33 μm; groove width is 0.5; groove depth ratio is 1; groove angle is 22°; the operating speed is 80 rpm; and lubricant is low-viscosity oil. In addition, the stiffness coefficients calculated by the present method together with the numerical results from Jang and Kim 24 are compared in Figure 7(b) with the same simulated parameters used in Jang and Kim. 24 The present results match well with their results.

Flow chart of the solution procedure.

Evaluation of the validity for present method: (a) result comparison for load carrying capacity and (b) result comparison for stiffness coefficients.
In the subsequent study, the high-speed water-lubricated HGJB is considered as research object. Assume the eccentricity occurs in the x direction, total load carrying capacity is given by
Parameters values of two styles of HGJBs used in simulation analysis.

Static characteristics
Eccentricity ratio
Effects of eccentricity on static characteristics of two types of aligned HGJBs are first investigated and shown in Figure 8. As we seen, at small eccentricity ratio

Variation of static characteristics of two types of HGJBs with eccentricity ratio
Length to diameter ratio
Figure 9 shows effects of length to diameter ratio

Variation of static characteristics of two types of HGJBs with length to diameter ratio
Groove angle
In HGJBs, herringbone grooves influence bearing performance in two ways: (1) offer the step effect to generate hydrodynamic pressure; (2) act as a vane to pump the fluid form bearing inlet to bearing outlet. Thereinto, the groove angle plays a critical role. Figure 10 shows that the variation of static characteristics of two types of HGJBs versus groove angle. Pumping-out HGJB attains the large load-carrying capacity in the large groove angle region. The contrary is the case of pumping-in HGJB, and an obvious optimum groove angle for load carrying capacity

Variation of static characteristics of two types of HGJBs with groove angle
Groove depth ratio
Effects of groove depth ratio on the static characteristics of two types of HGJBs are given in Figure 11. With increasing the groove depth ratio, load carrying capacity of pumping-out HGJB decreases while that of pumping-in HGJB first increases and then decreases and has an optimum groove depth ratio of 2. Load carrying capacity of pumping-out HGJB is larger than that of pumping-in HGJB for all groove depth ratios. Friction power loss of pumping-out HGJB is smaller than that of pumping-in HGJB. Moreover, volume flow rate of pumping-out HGJB is smaller than that of pumping-in one, the contrary is the case of temperature rise.

Variation of static characteristics of two types of HGJBs with groove depth ratio
Sealing damp width ratio
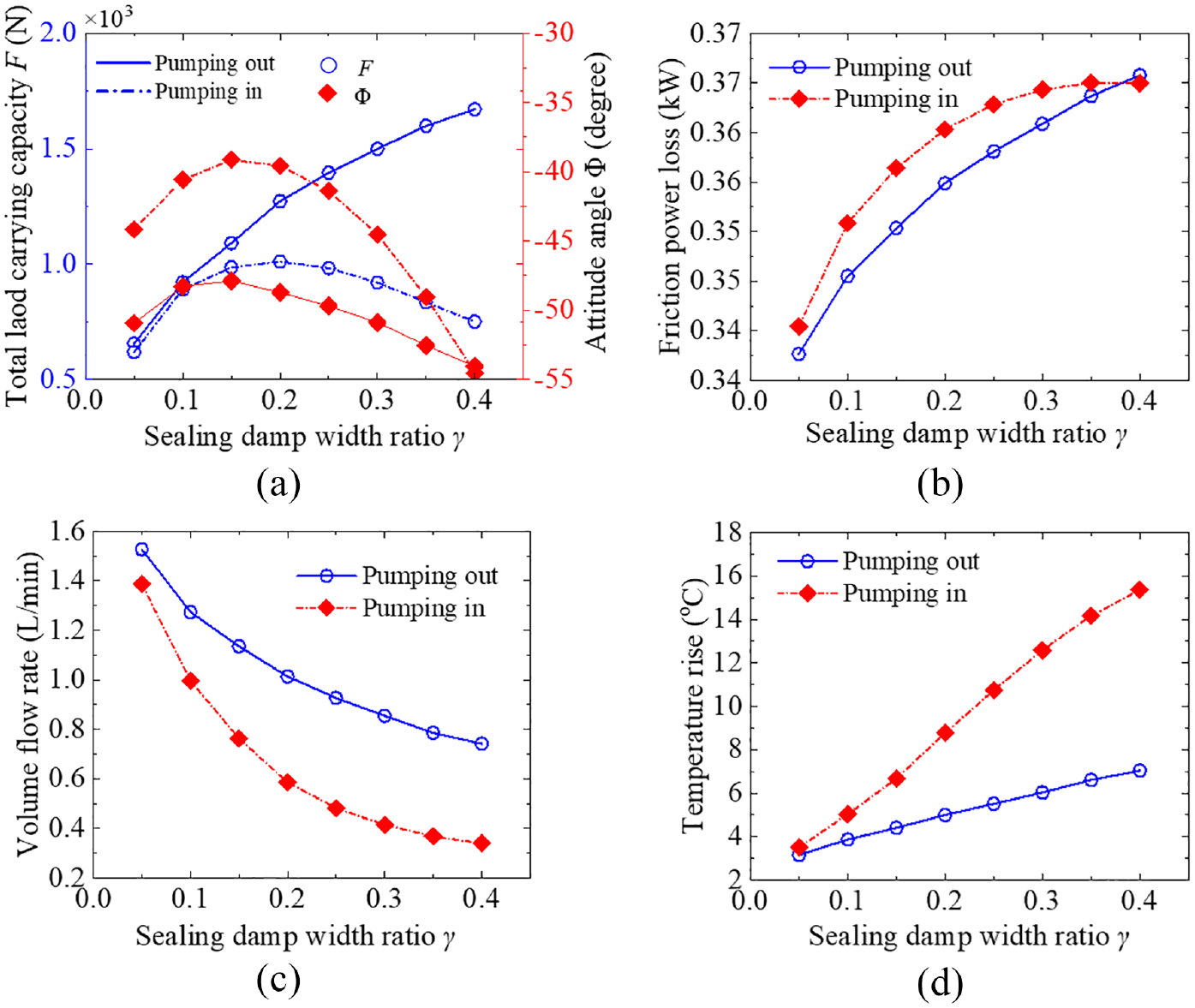
Figure 12 shows the effects of sealing damp on static characteristics for two types of HGJBs in terms of sealing damp width ratio
Variation of static characteristics of two types of HGJBs with sealing damp width ratio
A possible explanation for the difference in load-carrying capacity of two bearings is given here. Sealing damp plays two roles in HGJB: the axial slit restrictor and a partial plain journal bearing. These two roles produce effect A and effect B, respectively, in detail, effect A is that the restrictor improves the pressure level in the grooved region through hindering the outflow; effect B is that the wedge in the sealing damp can produce a hydrodynamic pressure but weaken the pressure level in the grooved region. For pumping-out HGJB, effect A is dominated over effect B in the whole range of sealing damp width ratio. For pumping-in HGJB, effect A is dominated at
Tilting ratio
In order to investigate the effects of tilting degree of journal on bearing static performances, a non-dimensional variable called the tilting ratio is defined as

Variation of static characteristics of two types of HGJBs with tilting ratio
Dynamic characteristics
In this section, stiffness and damping coefficients of two types of HGJBs running at 12,000 rpm under the zero eccentricity are plotted comparatively with tilting ratio. Then, critical mass and critical whirl frequency of two HGJBs are analyzed to give a more intuitive comparison indication of stability.
Due to considering the tilting motion, the dynamic coefficients of HGJB include 16 stiffness coefficients and 16 damping coefficients. When HGJB operates in zero eccentricity without journal tilt, the dynamic coefficients have the symmetric feature, that is,
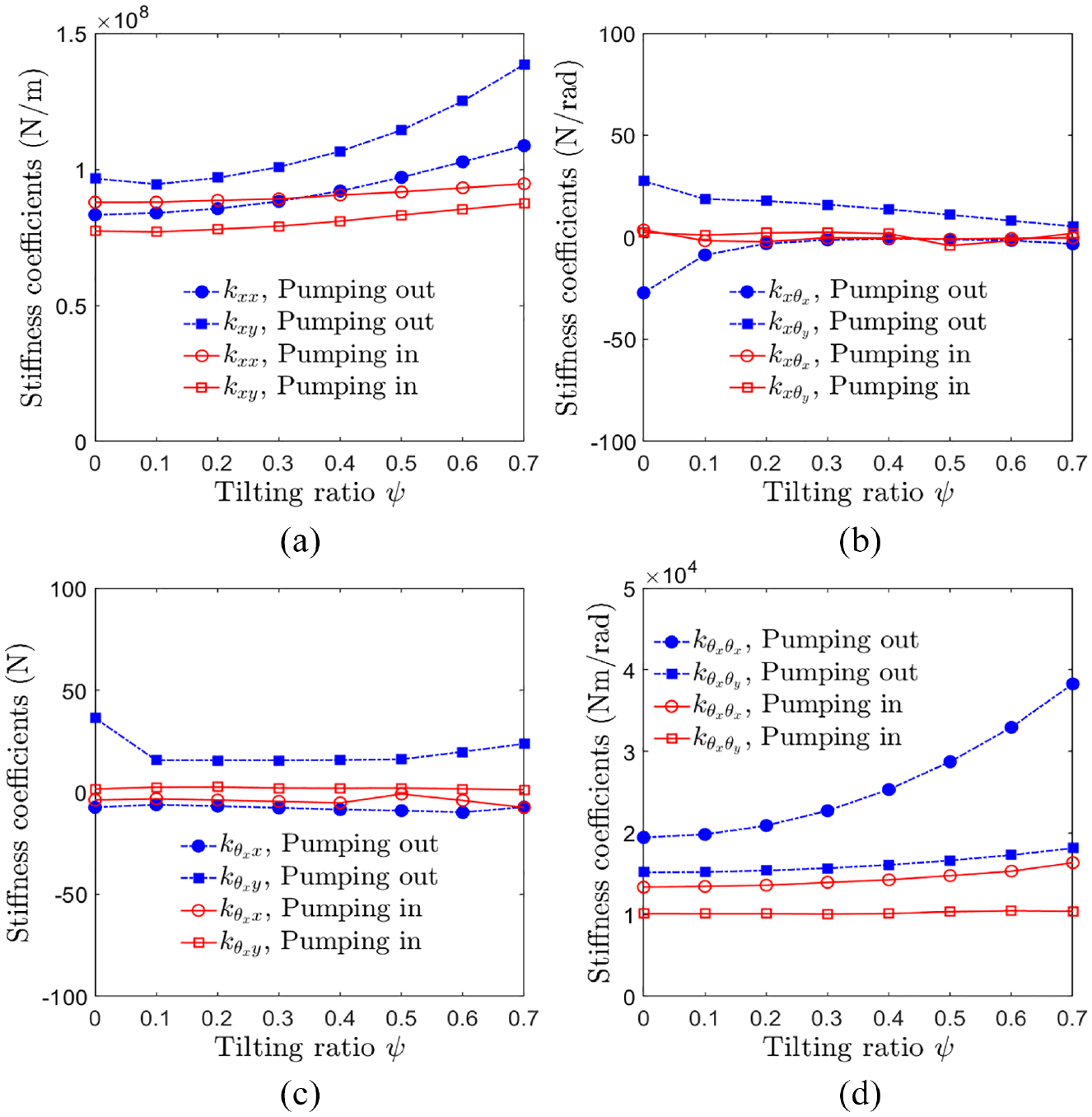
Comparison of stiffness coefficients of pumping-out and -in HGJB versus tilting ratio

Comparison of damping coefficients of pumping-out and -in HGJB versus tilting ratio
It also can be seen from Figures 14 and 15 that, the dynamic coefficients of pumping-out HGJB are more sensitive to jounal tilt comparing to pumping-in HGJB. This is understandable that the pressure peaks of pumping-out HGJB are closed to bearing two ends, where bearing clearance is most influenced by journal tilt, and thus the pressure distribution of pumping-out HGJB changes more obviously due to journal tilt.
Figure 16 displays the comparison of stability of pumping-out and -in HGJB versus tilting ratio. Agreeable with the conclusion drawn from Figure 14(a), pumping-in HGJB presents the better stability than pumping-out HGJB. Form critical whirl frequency which represents bearing rigidity, pumping-out HGJB has a larger supporting rigidity than pumping-in one. It can be also seen that Journal tilting effect improves obviously bearing stability but just slightly change the bearing critical whirl frequency.

Comparison of stability of pumping-out and -in HGJB versus tilting ratio
Stability and rigidity of two types of HGJB in different eccentricity ratio are also investigated and presented in Figure 17. The conclusions about two bearing stability and rigidity keep unchanged during the eccentricity range of 0–0.75.

Comparison of stability of pumping-out and -in HGJB versus eccentricity ratio
Conclusions
A 4-DOF dynamic model for HGJB considering tilting effect and turbulent effect is established. The load carrying capacity, friction power loss, volume flow rate, and temperature rise are calculated numerically. Thirty-two dynamic coefficients are calculated numerically and are used in solving a 4-DOFs motion equation for stability analysis of HGJB. Extensive comparisons of static and dynamic characteristics of pumping-out and -in HGJBs are carried out. The main conclusions are summarized as follows:
With the same bearing configuration parameters and operation condition, pumping-out HGJB is superior to pumping-in HGJB in terms of load carrying capacity for all eccentricity ratios, groove angles, groove depth ratios, and tilting ratios. However, load carrying capacity of pumping-out HGJB is obviously inferior to pumping-in one when length to diameter ratio
As to friction power loss, the difference between two types of HGJBs is very small for all eccentricity ratio and length to diameter ratio; pumping-out HGJB has the lower friction power loss for almost all groove depth ratios; but when groove angle exceeds about 28° and tilting ratio exceeds about 4.5, friction power loss of pumping-out HGJB becomes higher than that of pumping-in one.
During the interested whole range of investigated parameters, pumping-out HGJB has the bigger volume flow rate and the lower temperature rise comparing to pumping-in HGJB.
Stability of pumping-out HGJB has an obvious advantage over the pumping-in HGJB for
Footnotes
Appendix 1
Appendix 2
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Basic Public Welfare Research Program of Zhejiang Province (No. LGN22E050002) and Hangzhou Science and Technology Development Plan Program (No. 20201203B97).