
Abstract
Surface permanent magnet synchronous motor (SPMSM) is widely used in low-speed and high torque permanent magnet synchronous motor. A multi-objective optimization method of hollow shaft direct drive motor (HSDDM) for double direct drive feed system (DDFS) is proposed in this paper. Several dimensions of HSDDM are considered in the proposed design procedure including pole embrace, thickness of magnet, eccentric distance, and air gap length. A multi-objective optimization model is established to minimize cogging torque, maximize efficiency, and minimize the magnet weight. The Optimized Latin hypercube sampling (OLHS) is used to design the experimental samples, and the sampling results are calculated by the finite element method (FEM). The Kring approximate model is established according to the sampling results. Based on the established approximate model, NSGA II multi-objective genetic algorithm is used to optimize the HSDDM. Compared with that before optimization, the efficiency after optimization is increased by 4.08%, the cogging torque is reduced by 86.78%, and the magnet weight is reduced by 20.24%. Eventually, the integration of NSGA-II and FEM provides an effective approach to obtain the optimal design of HSDDM.
Keywords
Introduction
Permanent magnet synchronous motor (PMSM) has the advantages of simple structure, high output torque, high power density, and high efficiency.1–3 With the development of PMSM in the direction of increasing torque and reducing volume, low speed high torque permanent magnet motor is widely used in direct drive in industry. 4 The installation methods of permanent magnet on the rotor of PMSM mainly include surface permanent magnet synchronous motor (SPMSM), embedded permanent magnet synchronous motor (EPMSM), and interior permanent magnet synchronous motor (IPMSM). SPMSM is easy to design, install, and produce, with low cost. It can realize the rich combination of slot and magnetic pole, stator slot wedge and magnet shape, and has low cogging torque. Therefore, SPMSM is widely used in low-speed and high torque permanent magnet synchronous motor.5,6
Many researchers have done a lot of research on the optimal design of PMSM. Ahn et al. 7 used particle swarm optimization algorithm to design and optimize the SPMSM of unmanned aerial vehicle (UAV), but the particle swarm optimization algorithm needs to define the initial area, which is difficult and time-consuming. Yermaz et al. 8 used single purpose artificial bee colony algorithm and symbiotic biological search to optimize the design of SPMSM. Edhah et al. 9 designed fractional slot concentrated winding of a PMSM based on experience and analysis method. It can be seen that these researches are usually far from the robustness required by multi-objective algorithms. The design of a PMSM often depends on multi-objective, and the purposes often conflict with each other. Therefore, multi-objective evolutionary algorithm is used in the optimal design of motor, such as genetic algorithm, fuzzy method, or Taguchi method.10–12 Multi objective genetic algorithm provides better convergence and solution than other multi-objective evolutionary algorithms. Therefore, multi-objective genetic algorithm has become one of the highly preferred algorithms in motor design optimization.13,14 Mutluer 15 used multi-objective genetic algorithm to optimize the design of direct drive external rotor permanent magnet synchronous motor. Chowdhury et al. 16 uses GA and Taguchi’s robust design techniques to minimize torque fluctuations while maximizing the average torque of SPMSM at a single operating point. Islam et al. 17 uses the global response surface method to optimize the multi-objective and multi-load point design of IPMSM to achieve low torque ripple and high average torque in the whole speed range. Baek 18 proposed a shape optimization design method of Brushless DC (BLDC) motor for electric continuous variable valve timing (E-CVVT) system of internal combustion engine and hybrid electric vehicle. The proposed design aims to maximize the maximum torque and rated efficiency of BLDC motor and minimize cogging torque. 18 Wang et al. 19 proposed a multi-objective optimization algorithm to determine the rotor design parameters which maximize the output torque of the PMSM over three different load conditions (no load, rated load, and maximum speed load). El-Nemr et al. 20 proposed an optimal design methodology for SRM using the non-dominated sorting genetic algorithm (NSGA-II) optimization technique.
In this paper, multi-objective genetic algorithm is applied to the optimal design of HSDDM in the DDFS. It is preferred to determine the design variables and value range that affect the shape of permanent magnet of the HSDDM. A multi-objective optimization model is established to minimize cogging torque, maximize efficiency, and minimize the magnet weight. The OLHS is used to design the experimental samples, and the sampling results are calculated by the FEM. The Kring approximate model is established according to the sampling results. Based on the established approximate model, NSGA II multi-objective genetic algorithm is used to optimize the HSDDM. Compared with that before optimization, the efficiency after optimization is increased by 4.08%, the cogging torque is reduced by 86.78%, and the magnet weight is reduced by 20.24%.
The DDFS and the HSDDM description
The DDFS description
The schematic diagram for the structure of the DDFS based on the nut driven ball screw pair is illustrated in Figure 1.

The schematic diagram of the DDFS structure.
In the DDFS, the screw shaft and screw nut, both driven by PMSMs, rotate in the same direction at high speed and are superimposed though the ball screw pair to obtain low-velocity of the table. This design ensures that the driven table travels at low velocity with the two motors rotating at high speed. The low velocity of the table is obtained, and the crawling zone for the motors at low speed is avoided by superposing two PMSM rotating speeds at high speed by the ball screw pair.21,22
The HSDDM description
The HSDDM for the DDFS adopts permanent magnet surface mounting type, and the diameter of the rotating shaft hole is 18 mm, as shown in Figure 2.

The HSDDM structure: (a) the HSDDM structure and (b) the slot type of the HSDDM.
The parameters of the HSDDM are shown in Table 1. To reduce the torque ripple of the HSDDM, the shape of permanent magnet is optimized in this paper.
Description of the HSDDM.

Multi-objective optimization of the HSDDM
In order to accurately obtain the optimal parameters of HSDDM, the multi-objective optimization design process based on genetic algorithm is shown in Figure 3.

Optimization design process of the HSDDM.
Analysis and determination of motor optimization objectives and parameters
Determination of design variables
There are many design variables in the design optimization of a PMSM. According to the actual situation, the pole embrace (α), thickness of magnet (h), eccentric distance (l), and air gap length (δ) are selected as the design variable, as shown in Figure 4 in this paper. The final determination of the value range of design variables based on the original design is shown in Table 2.

Design variables.
Value range of design variables.

Constraints
The constraint condition is to ensure that the optimization result can meet the performance indexes and basic design requirements of motor design while meeting the objective function. General constraints include slot fill factor, stator-teeth flux density, stator-yoke flux density, thermal load, and magnet weight. If the slot fill factor is too high, it will lead to the difficulty of motor offline and increase the process difficulty of motor design; If the stator-teeth flux density is too high, it will lead to the increase of iron consumption and the increase of heat dissipation requirements for the motor. According to the actual situation, this paper takes the stator-teeth flux density, stator-yoke flux density, and thermal load as the constraints of this optimization.
Due to the difference in the order of magnitude and sensitivity of constraint values between constraint functions, the constraint conditions can be expressed as the following equation (1) by normalizing each constraint condition.

Where, Bt is the stator-teeth flux density of the optimized motor; Bj is the stator-yoke flux density of the optimized motor; Aj is the thermal parameters of the optimized motor; Bt0 is 1.64 T, which represents the stator-teeth flux density of the motor before optimization; Bj0 is 1.64 T, which represents the stator-yoke flux density of the motor before optimization; Aj0 is 250 A/mm3, which represents the thermal parameters of the motor before optimization.
Objective function
Cogging torque directly affects the operation performance of motor, especially for high-performance direct drive motor. At the same time, considering the economy of permanent magnet motor, it is hoped to reduce the magnet weight and save the cost without affecting the performance of the motor. The cogging torque Tcog (peak to peak value), the motor efficiency η, the magnet weight M are selected as objective functions in this paper.
The influence of design variables on the objective values is analyzed. The influence of design variables on efficiency is shown in Figure 5. As can be seen from Figure 5, the efficiency first increases and then decreases with the increase of pole embrace, eccentric distance and air gap, and first decreases and then increases with the increase of thickness of magnet.

Influence of design variables on efficiency: (a) pole embrace, (b) thickness of magnet, (c) eccentric distance, and (d) air gap length.
The influence of design variables on cogging torque is shown in Figure 6. As can be seen from Figure 6(a), the cogging torque increases with the increase of the thickness of magnet. Figure 6(b) shows that when the pole embrace exceeds 0.9, the cogging torque increases sharply with the increase of pole arc coefficient. As shown in Figure 6(c), the cogging torque decreases with the increase of the eccentric distance. This is because after the eccentricity of the permanent magnet, the air gap magnetic field is closer to sinusoidal, the harmonic of the air gap magnetic field decreases, and the cogging torque decreases. Figure 6(d) shows that changing the air gap also has an impact on the cogging torque. When other conditions remain unchanged, the cogging torque is the smallest when the air gap length is 0.7 mm.

Influence of design variables on cogging torque: (a) thickness of magnet, (b) pole embrace, (c) eccentric distance, and (d) air gap length.
The influence of design variables on the magnet weight is shown in Figure 7. According to Figure 7(a), (b) and (d), the magnet weight changes linearly with the pole embrace, the thickness of magnet, and the air gap length. The magnet weight increases with the increase of the pole embrace and the thickness of magnet, and the mass of the magnet weight decreases with the increase of the air gap length. Figure 7(c) shows that the magnet weight decreases with the increase of the eccentric distance, but there is no nonlinear relationship.

Influence of design variables on the magnet weight: (a) pole embrace, (b) thickness of magnet, (c) eccentric distance, and (d) air gap length.
In Isight, the objective function is taken as

Where, xi is the design variable; ω1, ω2, ω3 are the weighted values of efficiency, cogging torque, and magnet weight respectively. In this paper, the optimization focuses on improving motor efficiency and reducing cogging torque ω1 = ω2 = 0.4, ω3 = 0.2; sf1, sf2, and sf3 are the scale factors of efficiency, cogging torque, and magnet weight respectively, where sf1 = 10, sf2 = 4, and sf3 = 0.02.
Optimized Latin hypercube sampling
According to the value range of design variables, in order to reduce the number of experiments, the OLHS is selected for experimental design. The sample distribution results obtained with OLHS are shown in Table 3.
Sample distribution using OLHS.

Automatic calculation of parameters of sample points by FEM
When establishing the FEM of the HSDDM in Maxwell software, the script recording function in Maxwell software is used to record the motor modeling and solution process into a script file in VBS format. The script file of the above modeling and solution process is parametrically integrated with simcode component in the Isight software to complete the parametric calculation of sample points of experimental design. The parameterized calculation integration process of the experimental design sample points in the sight software is shown in Figure 8.

Parametric calculation integration of experimental sample points in the Isight.
According to the experimental samples designed above, calculate the cogging torque, efficiency, magnet weight, heat load, stator-teeth flux density BT, and stator-yoke flux density BJ corresponding to each sample point, as shown in Table 4.
Characteristics of sample obtained from OLHS using FEM analysis.

Kriging approximation model and multi-objective optimization
Kriging approximation model
Kriging approximation model is composed of regression model and correlation model, which has high fitting accuracy. The regression models include zero-order, first-order, and second-order polynomial fitting. The relevant models mainly include Gaussian function, linear function, exponential function, and so on.
Let an m-dimensional design variable S = (s1s2…sm) T and the response value Y = (y1, y2…ym) T then the response value can be expressed as

Where, F(s) is the global regression model, β is the regression coefficient, z(s) is the correlation function, and obeys the local deviation with zero mean but non-zero variance created on the basis of the regression model.
For any two z(si) and z(sj), the covariance is


In this paper, the correlation function is Guassian function.
Kriging approximate models are established between the objective values and the design parameters, and the prediction accuracy of the approximate model is evaluated by R-square error analysis method and mean value. The approximate model error estimates between constraint values, objective values, and parameter variables are shown in Table 5 and Figure 9.
Approximate model error estimation.

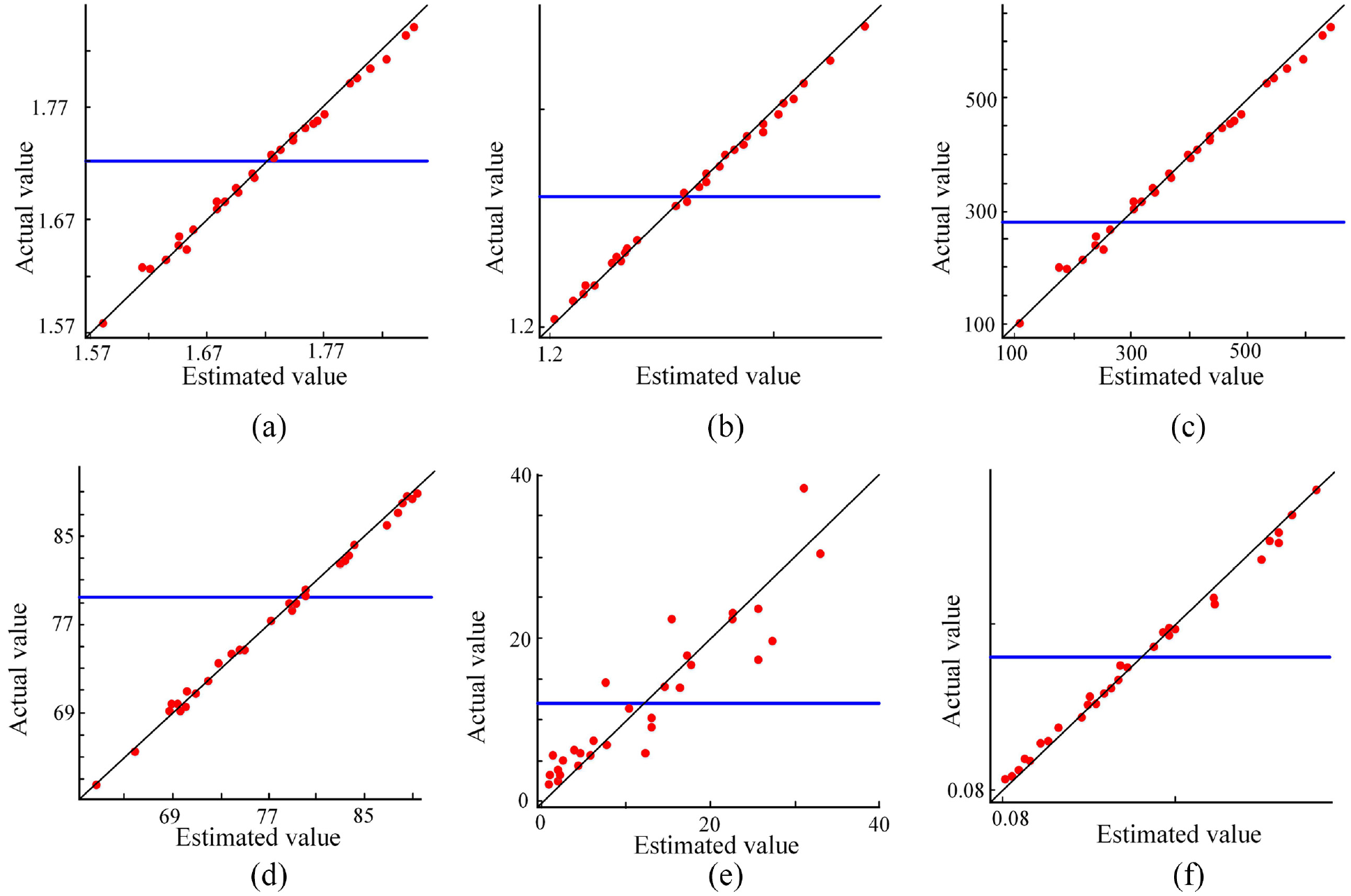
Fitting between constraint values, objective values, and parameter variables: (a) stator-teeth flux density, (b) stator-yoke flux density, (c) motor thermal parameters, (d) efficiency, (e) cogging torque, and (f) magnet weight.
According to Table 4, the R-square of stator-teeth flux density, stator-yoke flux density, thermal parameters, efficiency and magnet weight is more than 0.9, the R-square of cogging torque is slightly lower than 0.829, and the mean error is within 0.2. The established approximate model can accurately simulate the relationship between objective value and constraint value and various parameter variables.
Multi-objective optimization
Based on the Kriging approximate model, NSGA-II is used for multi-objective optimization to find out the optimal parameters of design variables in the feasible interval in this paper. The integration of approximate model and multi-objective genetic algorithm of NSGA-II in Isight is shown in Figure 10.

Integration of approximate model and multi-objective optimization in Isight.
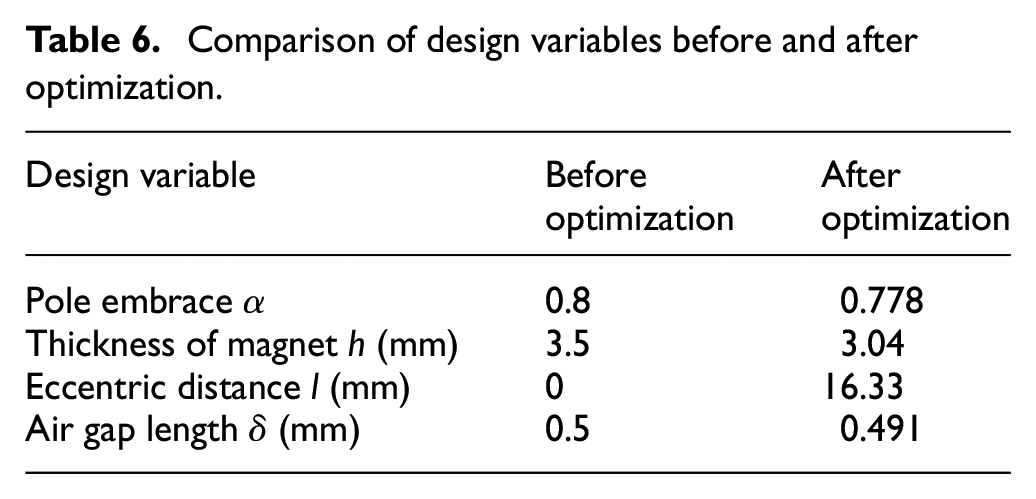
The population number is defined as 100, the genetic algebra is 2000, the mating probability is 0.9, and the mutation probability is 0.09. After 2000 generations of optimization, the optimal solution and the corresponding optimal design variables found by NSGA-II can be obtained. The comparison of design variables before and after optimization is shown in Table 6.
Comparison of design variables before and after optimization.
Simulation and test verification
Simulation results before and after optimization
The optimized design variable values are substituted into the FEM. The comparison of objective values before and after optimization is shown in Table 7. After optimization, the efficiency is increased by 4.08%, the cogging torque is reduced by 86.78%, and the magnet weight is reduced by 20.24%.
Comparison of results before and after optimization.

The model of the HSDDM comparison before and after optimization is shown in Figure 11, the comparison of air gap magnetic density distribution is shown in Figure 12, and the tangential magnetic density and spectrum analysis of air gap are shown in Figure 13. After optimization, the air gap magnetic field distribution is more reasonable and the sinusoidal performance of air gap magnetic density is improved.

Model before and after optimization: (a) model before optimization and (b) model after optimization.

Air gap magnetic density distribution before and after optimization: (a) before optimization and (b) after optimization.
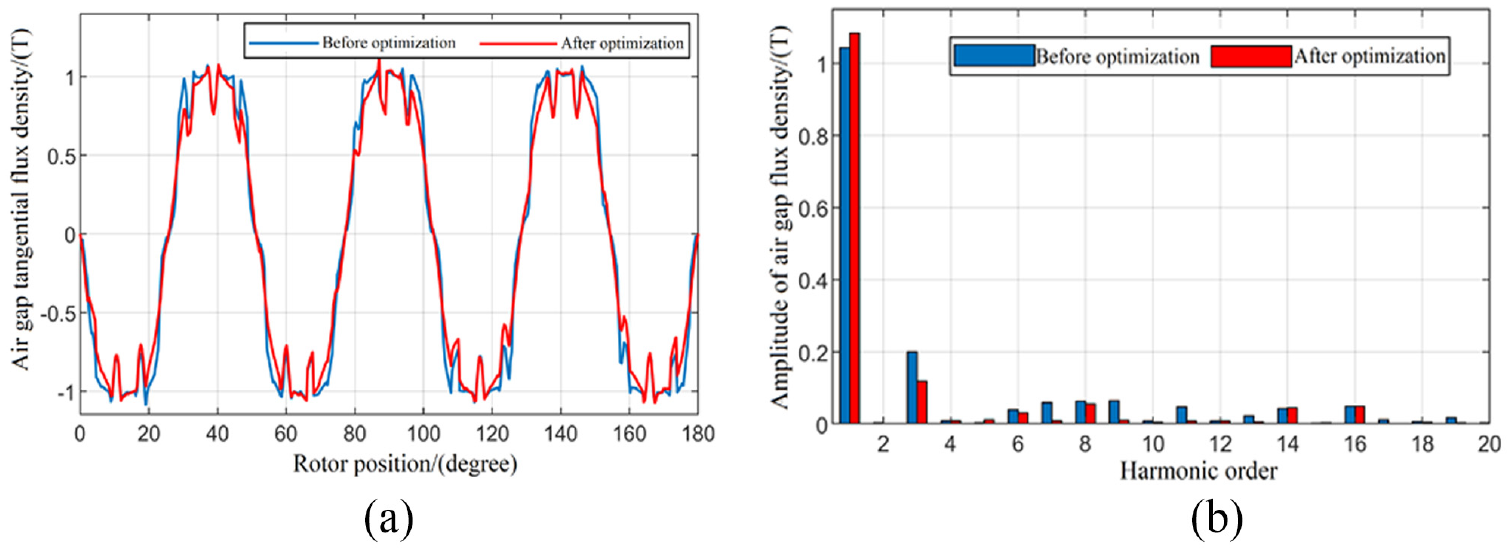
Optimized tangential air gap magnetic density: (a) air gap flux density distribution and (b) harmonic analysis of air gap flux densities.
The comparison of no-load back EMF waveform and harmonic analysis of the motor before and after optimization is shown in Figure 14. After optimization, the third harmonic of no-load back EMF is significantly reduced and the sinusoidal performance of no-load back EMF is improved.

Comparison of no-load back EMF before and after optimization: (a) back EMF waveform and (b) harmonic analysis of back EMF.
The comparison of cogging torque and rated torque of motor before and after optimization is shown in Figure 15. After optimization, the peak to peak value of cogging torque is 3.85 mNm, and the fluctuation rate of rated torque peak to peak value is 4.16%, which meets the design requirements.

Comparison of cogging torque and rated torque: (a) cogging torque and (b) rated torque.
Experiment of the HSDDM
To verify the proposed optimum design process, a prototype of the optimum HSDDM was fabricated. The optimized stator and rotor of the HSDDM are shown in Figure 16. The experimental setup is illustrated in Figure 17.
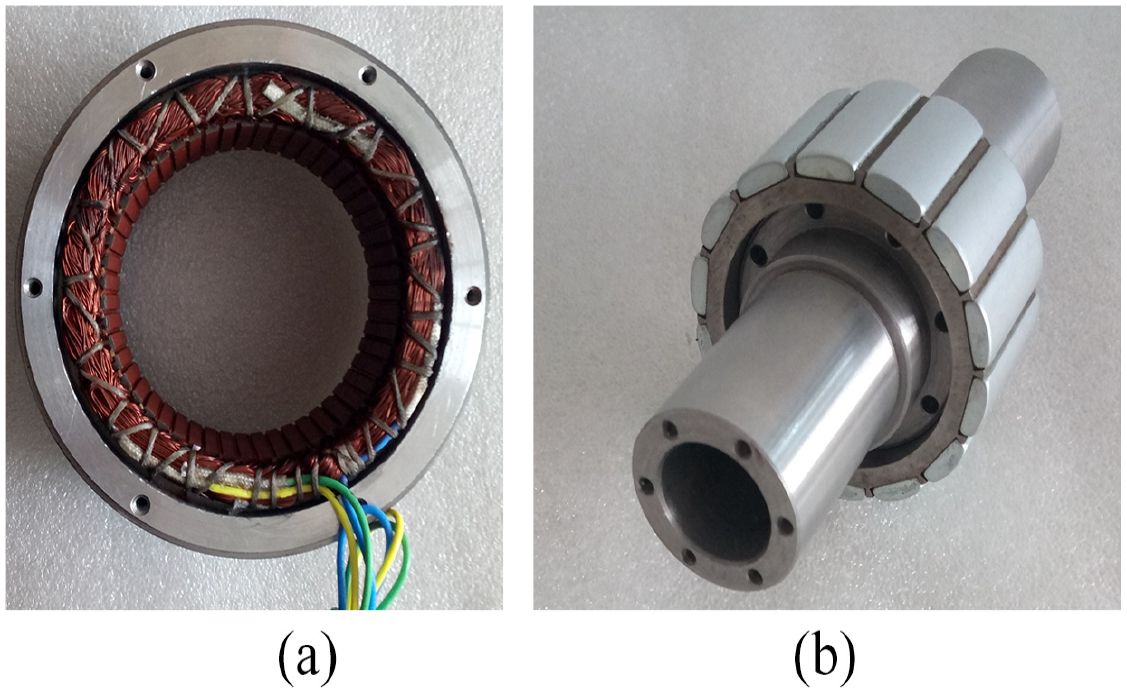
Optimized stator and rotor of the HSDDM: (a) stator and (b) rotor.

Experimental setup for the HSDDM.
The motor speed torque curve before and after optimization is shown in Figure 18. The optimized motor torque at the same motor speed is greater than that before optimization.
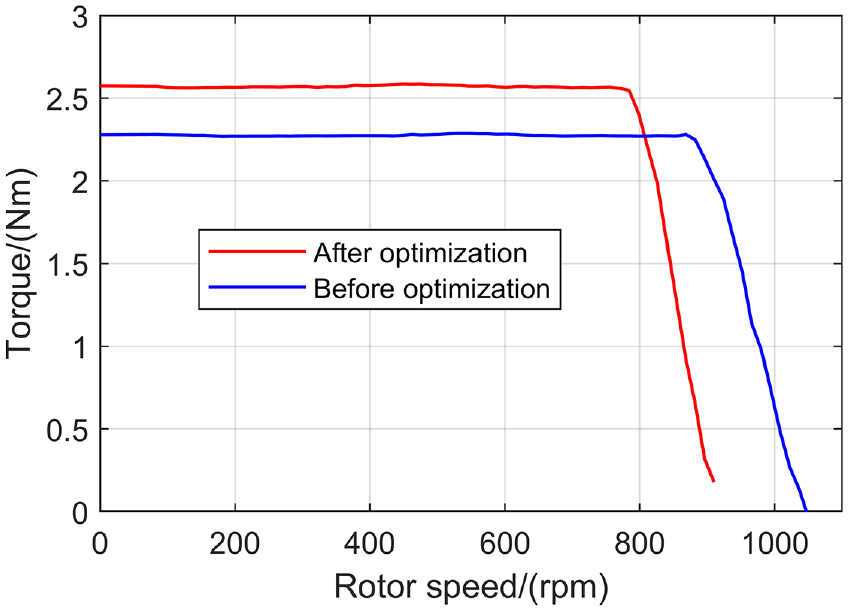
Motor speed torque curves before and after optimization.
The comparison of experimental and simulation results of objective values is shown in Table 8. After optimization, the error of objective values of the simulation and experimental results of the HSDDM is less than 5%, which indicate that the multi-objective optimization method proposed in this paper has high accuracy.
Comparison of simulation and experimental results after optimization.

Conclusion
In this paper, multi-objective genetic algorithm is applied to the optimal design of the HSDDM in DDFS. It is preferred to determine the design variables and value range that affect the shape of permanent magnet of the HSDDM. A multi-objective optimization model is established to minimize cogging torque, maximize efficiency, and minimize magnet weight. The OLHS is used to design the experimental samples, and the sampling results are calculated by the FEM. The Kring approximate model is established according to the sampling results. Based on the established approximate model, NSGA II multi-objective genetic algorithm is used to optimize the HSDDM. Compared with that before optimization, the efficiency after optimization is increased by 4.08%, the cogging torque is reduced by 86.78%, and the magnet weight is reduced by 20.24%.
Footnotes
Handling Editor: Chenhui Liang
Authors contributions
ZW wrote the manuscript. JG performed the data analyses. BL revised the language of the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has been supported by the Key projects of natural science research in colleges and universities in Anhui Province (No. KJ2021A0468), Anhui intelligent mine technology and equipment Engineering Laboratory (No. AIMTEEL202204), and university the level key projects of Anhui University of Science and Technology (No. xjzd2020-10).
Consent to publish
I would like to declare on behalf of my co-authors that the work described was original research, and it has not been published previously, meanwhile, the paper is not to under consideration for publication elsewhere. All the authors listed have approved the manuscript that is enclosed.