
Abstract
Manufacturing robots are used for industrial purposes. Robots used for manufacturing purpose have the power to create products from raw materials and are capable of operating endlessly even in lights-out situations for continuous production. Manufacturing robots can be used in applications like arc welding, spot welding, materials handling, machine tending, painting, machine cutting and so on. Selecting a robot for a given application is complex. However, robot selection is used in selecting a suitable robot for the preferred output with specific application ability. In recent years, many authors used multi-criteria decision-making methods to select a robot that meets the need. This study presents a hybrid model by integrating complex proportional assessment (COPRAS) with the weighted aggregates sum product assessment (WASPAS) methods in intuitionistic dense fuzzy set to select a manufacturing robot for a particular application. Intuitionistic dense fuzzy entropy is used in calculating the weights for the criteria and intuitionistic dense fuzzy COPRAS and WASPAS are used in ranking the best alternatives where in the optimum types of robots are obtained. Here, intuitionistic dense fuzzy sets are used as it is capable of dealing with the intangible factors while selecting a robot. On the basis of the manufacturing robot selection, two comparisons are given. First, the results are compared with various
Keywords
Introduction
Manufacturing is the process of creating or producing items using materials, manpower, machinery, tools and preparation using chemicals or biological processes. Manufacturing industries serves as a main tool for countries economic growth. 1 The use of robots in this manufacturing sector will drive the economical growth even further. Manufacturing robots help in producing goods with increased efficiency, higher quality, improved working environment, increased profitability, longer working hours, better consistency, maximum productivity, greater safety for humans, reduced direct labor costs, and so on. In today’s industries, robots are considered to be a very powerful element that can automatically control, reprogram and manipulate multipurpose program in three or more axes. 2 The energy-based requirements for robots are detailed in Jilte et al. 3 and Wang et al. 4 In considering the manufacturing robots in industries, selecting a robot for a particular purpose is complex. A company’s productivity will suffer by inappropriate selection of robots. Thus, robot selection plays a vital role for the decision makers for selecting the most preferred alternatives. The approaches to robot selection are categorized into five main groups. They are, multi criteria decision making models (MCDM), production system performance optimization models, computer-assisted models, statistical models, and other approaches. Among the decision making models, MCDM is one of the most widely used decision methodologies involving both quantitative and qualitative factors in which the ranking of the alternatives are found in relation with various criteria. This technique includes several well-known methods like TOPSIS, 5 VIKOR, 6 AHP,7,8 COPRAS, 9 Entropy, 10 WASPAS, 11 DEMATEL,12–14 MAUT, 15 etc. Thus, MCDM methods were used in the fuzzy field to select the appropriate robot for a particular application. On considering the manufacturing sector, in the year 1993, a robot selection algorithm was created by Liang and Wang 16 by merging the concepts of fuzzy set theory and hierarchical structure analysis. Despite the merits, Liang and Wang 16 method has its limitations which was stated by Chu and Lin in 2003. 17 Hence, chu and Lin in the year 200317 introduced an industrial robot selection using fuzzy TOPSIS method to resolve the limitations. Bhangale et al. 18 identified 83 attributes/criteria of the real manufacturing robots and an attempt was made in selecting the most important criteria which will accurately and precisely identify the robot. Using the chosen criteria, the TOPSIS approach was used for robot selection. Kapoor and Tak 19 developed a technique for resolving industrial robot selection problems utilizing AHP that substitutes fuzzy linguistic variables for numerical values. In order to obtain the necessary output with minimal cost and specialized application ability, the decision maker must identify and choose the best-suited robot. So, Chatterjee et al. 6 introduced a robot selection problem using a compromise ranking called VIKOR and an outranking method which is ELECTRE to satisfy the needs of the decision maker. Industrial robot selection problems can be effectively solved using a variety of MCDM techniques since it involves a finite set of alternative options with multiple criteria. To resolve this in 2011, Athawale and Chakraborty 20 compared 10 popular MCDM methods for robot selection problem which performs the pick and place operations. In considering the milling application, the industrial robot selection was carried out by Breaz et al. 21 using AHP method. Wang et al. in 2018, 2 developed a cloud model based TODIM approach (An acronym in Portuguese of interactive and multiple criteria decision making) 22 with entropy based combination weightings to handle robot selecting problems within an uncertain linguistic context. To analyze the problem more accurately, Ghaleb et al. 7 compared TOPSIS, AHP and VIKOR methods and concluded that VIKOR method performed better in the manufacturing robot selection process. Traditional MCDM methods are getting much more outmoded as years progressed. The authors believe that a single MCDM tool is insufficient to make accurate decisions. Therefore, a hybrid model is to be created that would enable more effective decision-making. To solve this, Goswami et al. 23 analyzed a problem for robot selection by using hybrid MCDM models with ARAS-TOPSIS and ARAS-COPRAS. In a problem of selecting an industrial arc welding robot, Chodha et al. 10 used TOPSIS and entropy MCDM techniques.
Though the industrial robot selection has been performed with various MCDM models, the best technique to handle vagueness is still not defined. Thus, an integrated model of COPRAS and WASPAS are taken, and the robot selection is performed. The COPRAS and WASPAS are one of the predominant models in selecting the robots using total relative importance and relative significance of the alternatives with respect to criteria. Additionally, no research has been undertaken on selecting industrial robots by employing the integrated COPRAS-WASPAS model. To fulfill this research gap, this study utilized these models.
Motivation
In the year 2016, De and Beg24,25 believed that the set’s components are a series of functions that convert natural numbers into crisp numbers
(i) The fuzziness in the belongingness and non-belongingness of the elements becomes shorter and the execution is made with more approximation by introducing MCDM under intuitionistic trapezoidal dense fuzzy set (ITpDFS).
(ii) Any MCDM approach under the intuitionistic trapezoidal dense fuzzy (ITpDF) category must be proposed using a novel methodology.
(iii) Additionally, the literature discloses that no study has clearly examined a hybrid model using entropy, COPRAS, and WASPAS approaches in an ITpDF setting and so they are to be innovated. This idea provokes and motivates to introduce an MCDM model under ITpDF.
(iv) Though there are similar works with the same application, considering the industrial robot selection under ITpDF is found to be still lagging. Hence, they are incorporated in this article.
(v) Moreover, the literature still lags in defining best technique to handle vagueness. As a result, a hybrid method which includes COPRAS and WASPAS are considered in ITpDF field where the results are executed with respect to the learning experience of the decision maker.
Objective
The following section lists out the major objective of the study.
(i) To design a model for the industrial robot selection through MCDM models under ITpDFS.
(ii) To prioritize the industrial robots using a novel hybrid technique that incorporates entropy, COPRAS and WASPAS models under ITpDF environment.
(iii) To analyze the effectiveness of the proposed techniques.
(iv) To show the efficacy and applicability of the suggested ITpDF-Entropy-COPRAS-WASPAS model.
Contribution and novelties
MCDM models are one of the best decision-making methods one can perform. From the literature, the gaps in the concepts are found through which the novelty of the study are examined and contributed.
(i) Knowing the advantage of the IDFS, this article contributes a novel hybrid model (i.e. IDFS-Entropy-COPRAS -WASPAS method) in the intuitionistic dense fuzzy field for trapezoidal fuzzy number.
(ii) The concept of each method have been determined involving decision experts and criteria weights where the decision makers opinion are defined with respect to their frequency in observation or by their learning experience to reduce the vagueness in the fuzzy parameters.
(iii) This work also creates a new linguistic scale under the ITpDF since it covers a wider range of uncertain information than other fuzzy set extensions.
(iv) The applicability and robustness of the proposed method are determined using the manufacturing robot selection problem.
(v) Sensitivity analysis and comparative analysis are employed to verify the results that were obtained.
The structure is as follows: Section-1 contains the introduction part. Section-2 includes the review of literature Section-3 discusses some preliminaries. Section-4 proposes the algorithm used for the robot selection. Section-5 illustrates a case study based on an application. Section-6 dictates the sensitivity analysis of the study. Section-7 includes the comparative study of the robot selection. Finally, section-8 concludes the paper with some suggestions for future research.
Literature review
Though ample of methods are present in the literature for robot selection, the best technique to handle vagueness is undetermined. The IDFS is one the extensions of fuzzy set. The learning experience of the decision maker or observer with respect to the frequency of observation, turn-over, cycle time, number of decision makers, etc. is assisted by this new invention in terms of the fuzzy parameter’s ambiguity and vagueness. With this inkling, De and Beg24,25 presented the DFS in 2016, where they viewed the elements as a series of functions that converge to an element in the set. Incorporating this concept into the intuitionistic fuzzy context, Maity et al. 26 proposed the IDFS since it offers the element’s hesitancy also. Hence, in this article, an attempt has been made in determining the industrial robot selection on the basis of integrated Entropy-COPRAS-WASPAS under the IDF environment. A brief literature on Entropy, COPRAS and WASPAS methods are reviewed in this section.
A review on COPRAS method
The COPRAS model was pioneered by Zavadskas et al. in the year 1994. 27 Since then, it has been used in various fields. This method is found to be more accessible and simply comprehendible. It determines the solution and the ratio to the ideal and anti-ideal solution. In considering the construction field, Andruškevicius in 2005, 28 evaluated the contractor selection problem using the COPRAS method using 26 criteria. Zavadskas et al. in 2007 29 implemented the COPRAS methods to determine the best road construction alternatives. The research concluded that COPRAS method was appropriate for the use. The preferences of building owners regarding renovation measures were studied by applying MCDM methods namely Simple Additive Weighting (SAW), Multiplicative Exponential Weighting (MEW) and COPRAS by Medineckiene and Björk. 30 A comparative analysis of the abilities in the construction field during a crisis was led by Kildiene et al. 31 using the entropy and COPRAS method, where the COPRAS method was applied to evaluate the priority of each European country according to these criteria. To overcome the drawbacks faced by the classical approach, the fuzzy concepts are to be carried into the models. Hence, Fuzzy COPRAS carried out by Yazdani et al. 32 to rank the existing risk in a critical infrastructure. Fouladgar et al. 33 utilized fuzzy COPRAS and ANP to create a novel hybrid model for the evaluation of working strategies. From then on, fuzzy COPRAS were mutated to various extensions. Hajiagha et al. 34 extended the COPRAS technique using interval valued intuitionistic fuzzy sets. Ghorabaee et al. 35 examined COPRAS under the intuitionistic type-2 fuzzy set, for the supplier selection problem. The selection of E-learning website evaluation was determined by Garg and Jain 36 using FAHP, COPRAS, VIKOR, Weighted Distance Based Approximation (WDBA).In 2017, Peng and Dai 37 determined WASPAS, MABAC and COPRAS with combined weights under hesitant fuzzy soft sets which was illustrated with some examples. Also Mishra and Rani 38 performed service quality selection using Shapley-COPRAS under hesitant fuzzy soft sets. For a green supplier selection problem, Kumari and Mishra in 2020 39 considered intuitionistic fuzzy COPRAS method under parametric measures. Mishra 9 proposed a COPRAS method under interval-valued hesitant fermatean fuzzy sets in selecting desalination technology.
In considering the robot selection application, Mondal first put forth the COPRAS technique for the robot selection problem. In 2021, Goswami et al. 23 incorporated a hybrid MCDM model of TOPSIS-ARAS and COPRAS-ARAS for the robot selection problem. It is evident from the literature that there is a lack of work enabling COPRAS for the robot selection. Also, there exists a research gap for the implementation of the COPRAS approach in the IDF environment. Hence, they are adopted in this study.
A review on WASPAS method
WASPAS model was first introduced by Zavadskas et al. in 2012. 40 This method is just an integration of two models namely weighted sum model (WSM) and weighted product model (WPM). 40 Zavadskas et al. 41 utilized WASPAS model to prioritize the deep-water port in Klaipeda which involves multitude of requirements and uncertain conditions that have to be taken into consideration simultaneously. Using the WASPAS method, the most feasible location for the solar farm was selected and evaluated by Bagočius et al. 42 in 2014. To tackle the issues and drawbacks with the MCDM techniques, Zavadskas et al. 43 integrated interval-valued intuitionistic fuzzy numbers with WASPAS approach. He also 44 dealt with uncertainty under gray values by combining the WASPAS method with fuzzy set theory in the problem of selecting a contractor. In terms of city growth and public health, choosing the location for a waste incineration plant is crucial. Thus, the WASPAS approach which was extensively used in MCDM situations were adopted by Zavadskas et al. 45 to solve the site selection problem successfully. The same problem was explicitly formulated by Bausys and Juodagalviene 46 using the WASPAS method, which was integrated into the MCDM framework with the help of AHP approach. For a supplier selection in company manufacturing PVC carpentry products were selected using the novel rough WASPAS approach which was performed by Stojić et al. 47 In 2021, Yuan and Wu 11 integrated WASPAS and AHP methods in finding the optimization of a vibro-diagnostic model.
In considering the robot selection environment, Chakraborty and Zavadskas 48 defined a robot selection problem under eight real time selection problems arising in manufacturing environment which includes selection of industrial robot. To check the variation in raking performance, Mathew et al. 49 examined WASPAS method with the change in normalization technique. Since then, there have been no published papers on the selection of industrial robots using WASPAS. As a result, this article bridges the gap left by the literature review.
A review on entropy method
In 1947, Shannon 50 invented the concept of entropy, which is used to evaluate the degree of disorder in a system. Entropy, in particular, has developed into an important measure for evaluating the uncertainty degree in a system. And hence, it is also known as information entropy or Shannon entropy. The fuzzy concepts are subjective in nature, which is based on the decision maker’s opinions whereas, the entropy is one of the objective weighting method which helps to weight the criteria according to the level of fuzziness present in the opinions of the decision maker. Hence, in entropy method, the weightage for the criteria is increased with respect to the fuzziness present in the decision matrix, framed by the decision maker. As a result, it is used in calculating the weights of the criteria in MCDM models. In 1993, Luca and Termini 51 gave a clear view on the non-probabilistic entropy using fuzzy set theory. By defining the distance measure between intuitionistic fuzzy sets, Burillo and Bustince 52 introduced an axiom definition of intuitionistic fuzzy entropy and also recalled that these results are also good for interval-valued fuzzy sets. Szmidt 53 has suggested a non-probabilistic type entropy measure for intuitionistic fuzzy sets (IFS). In 2005 Szmidt, 54 as a continuation of their previous work, entropy measure for IFS was extended by examining their difference using normalized Euclidean distance and the normalized Hamming distance. Using intuitionistic fuzzy entropy measures, Chen and Li 55 carried out a comparison analysis to establish objective weights in 2010. Ye 56 defined an IFS-entropy using two effective measures known as the generalized version of the fuzzy entropy and a complementarity of existing entropy for IFS. On the basis of entropy measurement, a supplier selection problem is carried out by Shemshadi et al. 57 Li et al. 58 outlined the connection between the IFS’s entropy and similarity measures that differs from the definition of Li et al. 58 A new entropy method was proposed by Liu and Ren 59 which considered both the uncertainty and the hesitancy degree of IFS and applications in MCDM were also solved. In group decision-making setting with hybrid preference representations, Yue 60 used entropy method to weight the decision maker’s opinion and solved the model using TOPSIS technique. Intuitionistic fuzzy entropy was discussed by Liu et al. 61 and used to calculate the weight of the influencing factor on the engineering transaction mode, as well as the weight of the decision experts. Entropy was extended into Pythagorean fuzzy set by Kumar and Gandotra 62 using the TOPSIS approach to choose the advertising firm. To analyze the uncertain data in MCDM problems, a new entropy method was introduced by Thakur et al. 63 using COPRAS model under IFS. Chodha et al. 10 recently used TOPSIS and entropy methods to choose industrial arc welding robots in 2022.
Thus, from the literature, it is found that entropy is used in calculating the weightage and COPRAS-WASPAS are used in ranking the alternatives and in choosing the better one out of it. Therefore, this study focuses on the selection of manufacturing robots (i.e. alternative) in relation with the criteria using IDF-Entropy-COPRAS-WASPAS methods.
Preliminaries
It is possible to represent them as,

The DFS is represented graphically in Figure 1.

Graphical representations of DFS.
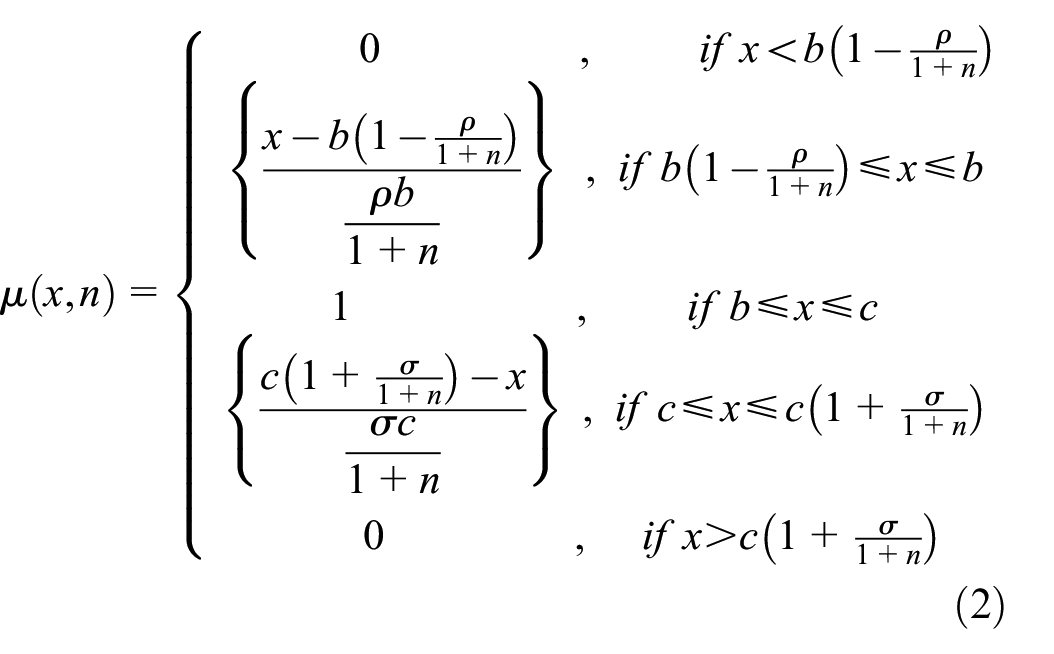
Membership function,

The function for membership is defined as follows,
Non-membership function,

The function for non-membership is defined as follows:

The pictorial representations of ITpDFS are given in Figures 2 and 3.

Membership functions of ITpDFS.
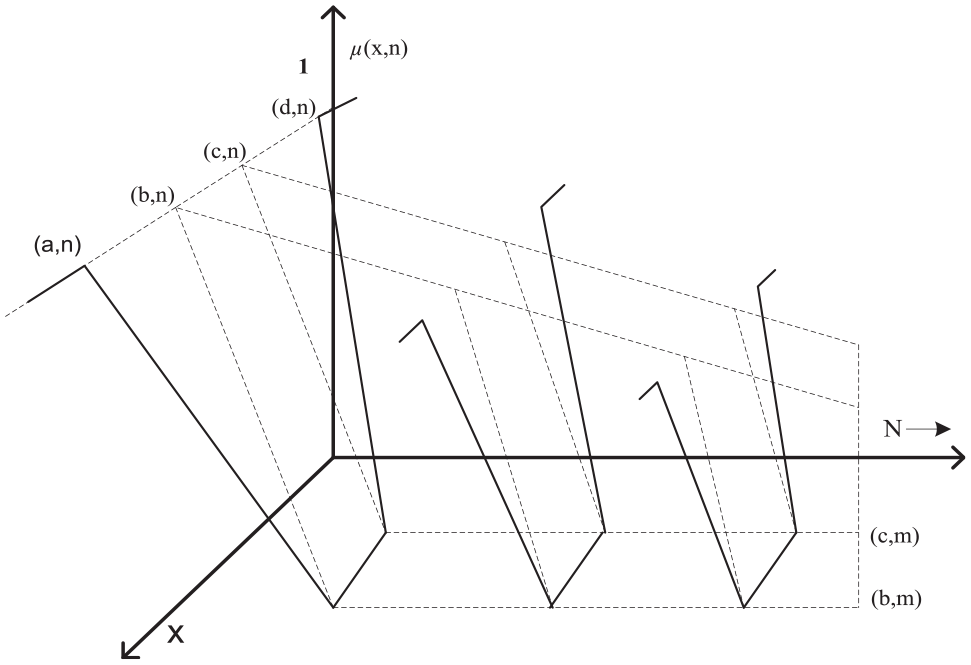
Non-Membership functions of ITpDFS.
Arithmetic operations for IDFS
If
If

For instance,
Let


where,




and,

The interval value of the ITpDFN for both membership and non-membership is defined as




Proposed methodology for robot selection based on intuitionistic dense fuzzy set
In considering the manufacturing robots in industries, robot selection for a particular application is complex. Robot selection plays a vital role for a decision maker in selecting the most preferred alternatives. Selecting a robot with the help of MCDM model in the IDF environment is at ease. Thus, an attempt has been made in introducing IDFS-Entropy method to find the weights for the criteria and IDFS-COPRAS and IDF-WASPAS methods to find the preference ranking of the robots. Thus, in this section, an algorithm on hybrid IDFS-Entropy-COPRAS-WASPAS is given and a complete flowchart is depicted in Figure 4.

IDF-Entropy-COPRAS-WASPAS process flowchart.
Algorithm of intuitionistic dense fuzzy Entropy-COPRAS method
Stage-1 entropy process
Decision matrix can be framed with the alternatives and criteria. The linguistic expression from the experts, corresponding to the

where m = number of alternatives and n = number of criteria.
LDM can be converted to an intuitionistic dense fuzzy matrix (IDM) using 5-point scale which is represented in Table 1 where the linguistic terms are transformed into intuitionistic trapezoidal dense fuzzy number (ITpDFN).

where
Five-point scale table.

The IDM can be defuzzified using graded mean defuzzification method 25 and the crisp values for each ITpDFN can be obtained in and the crisp decision matrix (DF) is formed in equation (7).

The normalization can be done to bring all the values in a comparable scale. The criteria are divided into beneficial and non-beneficial/cost criteria and the normalized ITpDF decision matrix (DM) can be computed using equations (8) and (9) respectively.


For beneficial criteria,

For cost criteria,

The output entropy

where,
The weight

Stage-2 COPRAS-WASPAS method
The IDM can be considered from step-2 equation (6), the N can be computed by assuming the beneficial and non-beneficial/cost criteria and by substituting the values using equations (12) and (13).
where
For beneficial criteria,

where
For cost criteria,

where
The additive relative importance (WAS) and multiplicative relative importnace (WPM) of maximizing indexes
In case of WAS,

In case of WPA,

where, *=+,−
The values of WAS and WPA can be defuzzified by the graded mean defuzzification method
25
for

where,
A joint generalized criterion for the the total relative importance for the maximizing indexes

The relative significance

The quantitative utility

Illustration of the proposed method for selecting industrial robots
The application of robots in manufacturing industries is particularly valuable. They perform a variety of industrial tasks. Replacing humans with robots in the manufacturing industries is more beneficial. The industrial company should find more profit than usual as a result of this replacement and so robot selection should be made more wisely. Thus, selecting a robot plays a very important role for a company. There are various robots in the field, and each one has its own characteristic. Here, in this study, the robot selection is done for the applications where the robots are used for some pick-n-place operations, provided it has to avoid some obstacles. The minimum constraints for this application are shown in Table 2. (Source from Bhangale et al. 18 )
Requirement for the robots operation.

Criteria considered for the problem
Numerous characteristics can be found for robot’s performance in a robot selection problem. In this study, five criteria are selected from the literature using various problems for robot selection and are tabulated in Table 3. Table 3 is based on different MCDM methods for robot selection in the field of fuzzy with the criteria used in the problem.
Criteria used for various MCDM approach on industrial robot selection.
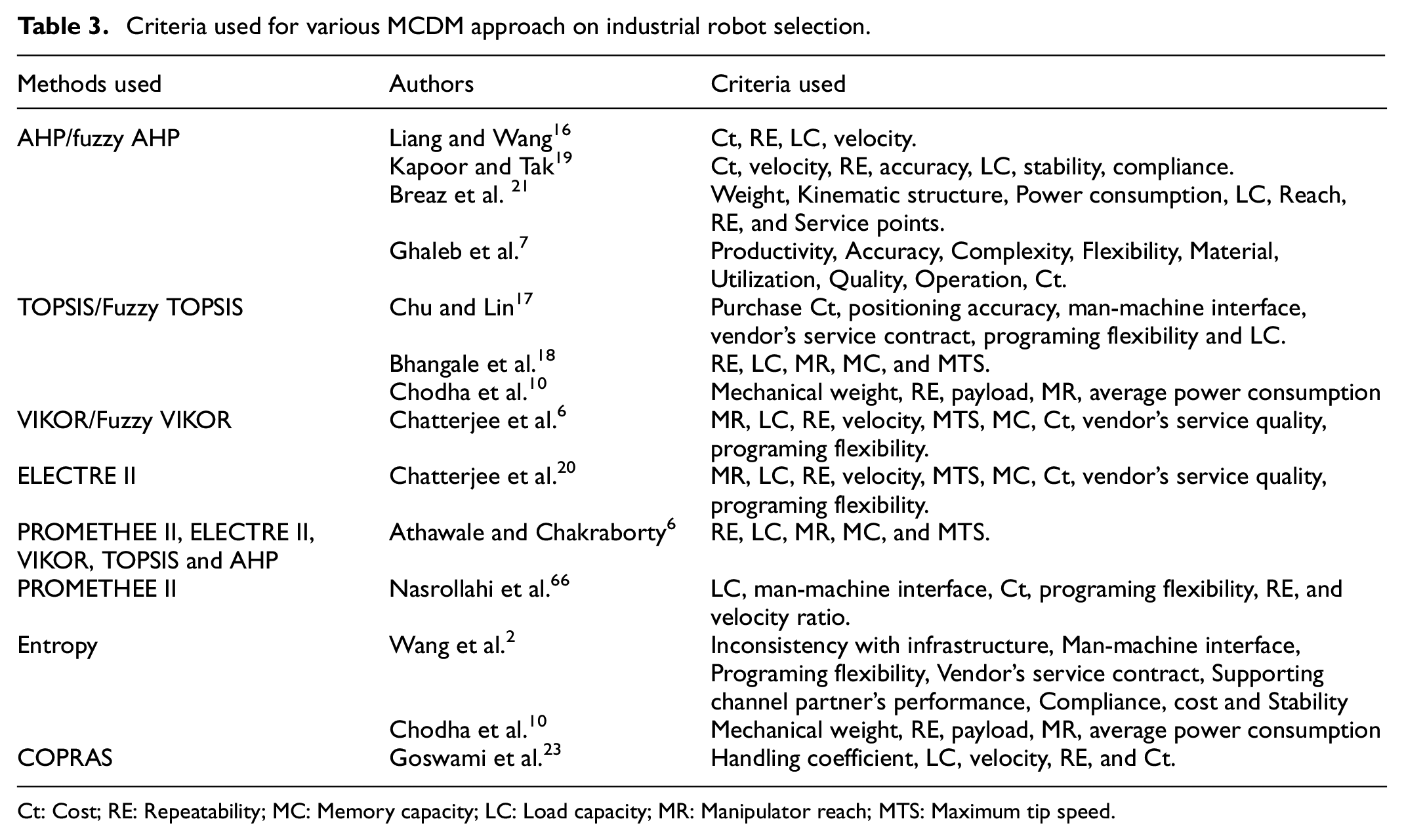
Ct: Cost; RE: Repeatability; MC: Memory capacity; LC: Load capacity; MR: Manipulator reach; MTS: Maximum tip speed.
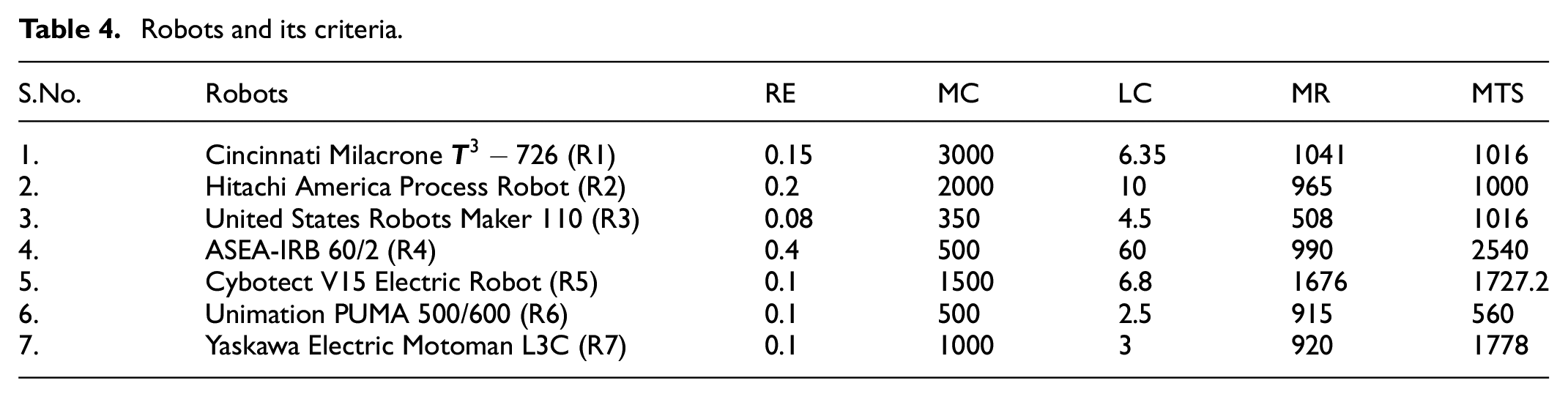
Thus, from Table 3,the criteria considered for the robot selection problem are RE, MC, LC, MR and MTS. The robots considered for the problems with its features are tabulated below in Table 4.(Source from Chatterjee et al. 6 )
Robots and its criteria.
IDF-Entropy-COPRAS method for industrial robot selection
Stage-1 entropy process
Linguistic decision matrix of DM-1.

Linguistic decision matrix of DM-2.

ITpDFS Five-point scale table for each n values.

Note that the elements are in the order such that
For membership function:

For non-membership function:

The n values are taken with respect to the expert’s experience in the field. More the experience, more the n values as they are directly proportional.
The IDM is defuzzified using graded mean defuzzification method 25 and the DF is represented in Table 8.
Crisp decision matrix.

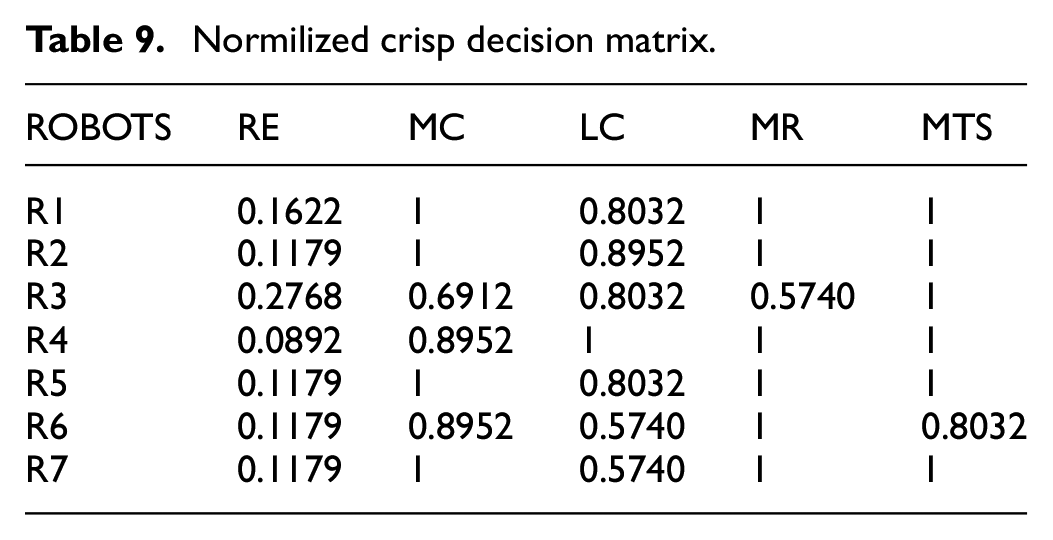
Normilized crisp decision matrix.
Entropy values.

Criteria weights.

Stage-2 COPRAS-WASPAS method
Weighted normalized decision matrix.

Defuzzified values.

Joint generalized criterion.

Relative significance of alternatives.

Quantitative utility values and Ranking.

Thus, from the above algorithm calculation, the best ranking is found to be R2. Wherein, the robot which ranks last is found to be R3. Thus, the robot selection is of the order
Sensitivity analysis
In this section, sensitivity analysis for the novel ITpDF-Entropy-WASPAS method is calculated.
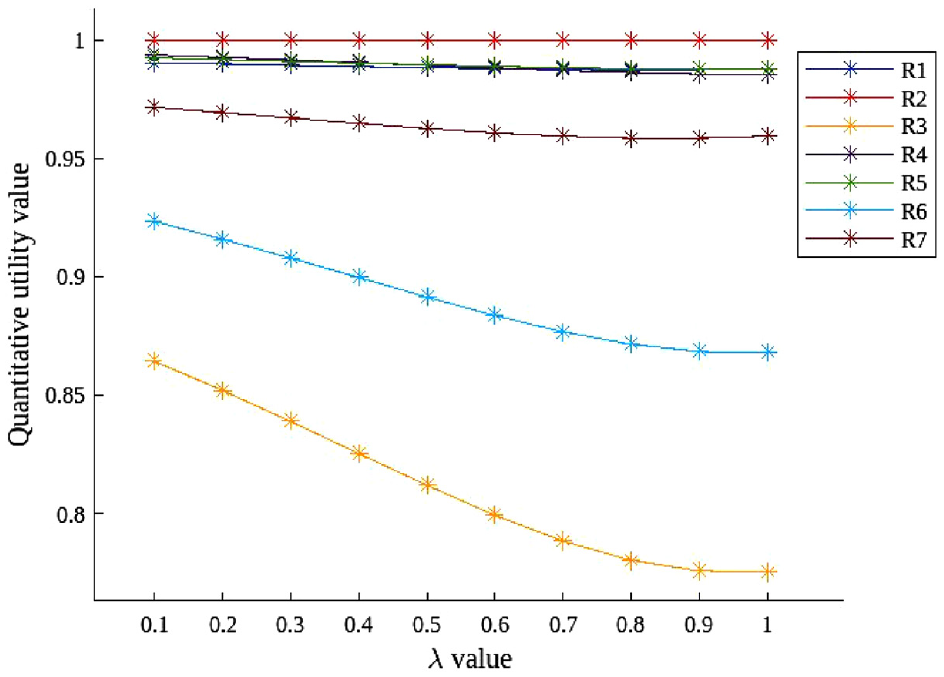
Here, the sensitivity analysis for the ITpDF-Entropy-WASPAS method is performed by increasing the
Sensitivity analysis using

Sensitivity analysis using
From the results, it is observed that the quantitative utility values change as the
Comparative analysis
This section examines a comparative analysis of the ranking results obtained from the novel IDF-Entropy-COPRAS-WASPAS method in three ways: based on various methods, on various extensions of fuzzy sets and on previous studies from the literature.
Comparative analysis on various methods
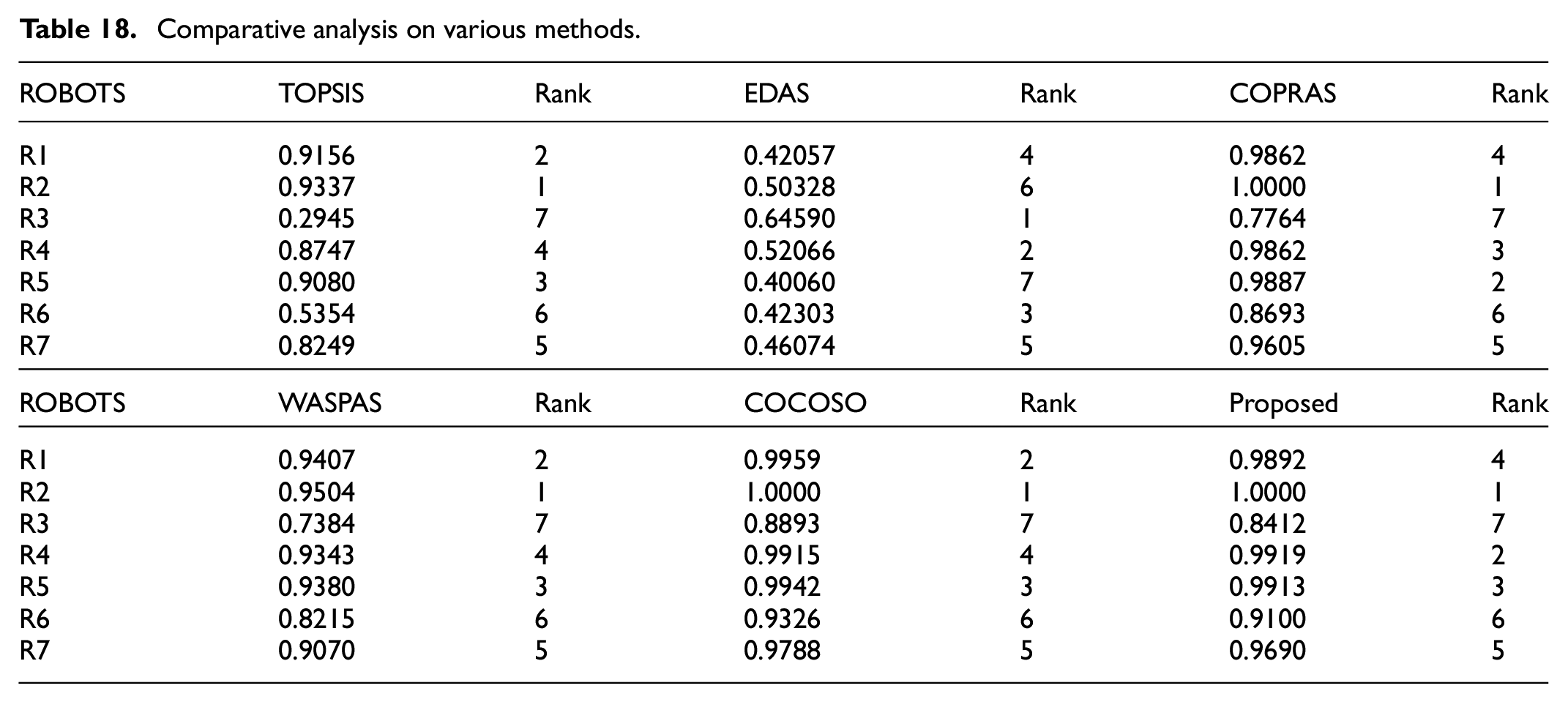
This comparison is performed with five predominant methods namely TOPSIS, EDAS, COCOSO, COPRAS, and WASPAS with the proposed model. The score values for all the five methods are taken and the comparative analysis is determined in Table 18 and shown in Figure 6.
Comparative analysis on various methods.

Comparative analysis on various methods.
Table 18 shows that, with the exception of the EDAS method, all methods are roughly ranked in the same order. Similarly, from Figure 6, it can be seen that the quantitative utility values are nearly the same, whereas the value of the EDAS method is found to have a significant difference when compared to the other methods. As a result, it is revealed that the proposed method provides a better approximation with better solution. Thus, the ranking order is determined as R2 > R5 > R4 > R1 > R7 > R6 > R3.
Comparative analysis on Entropy-COPRAS-WASPAS model for various extensions of fuzzy sets
This comparison is performed on the proposed integrated entropy-COPRAS-WASPAS model with other fuzzy extensions like fuzzy sets, intuitionistic fuzzy set (IFS) and dense fuzzy set (DFS). The comparison is tabulated in Table 19.
Comparative analysis on entropy-COPRAS-WASPAS model for various fuzzy sets.

According to Table 19, the robots R2 and R5 rank first for the fuzzy and intuitionistic fuzzy sets where uncertainty arises. However, the ranking order for DFS and IDFS differs depending on the robot. Therefore, DFS and IDFS perform better than all other fuzzy set extensions. In comparing the DFS and IDFS, the approximation is evident in IDFS, as the fuzzy elements in the set include non-belongingness and hesitancy. Therefore, it is claimed that the MCDM models under IDFS are the better choice.
Comparative analysis on previous studies from the literature
Here, the comparison is performed on the basis of the ranking order obtained from the previous literature works. The ranking obtained for the same robots from the previous works are tabulated in Table 20.
Comparative analysis on previous studies.

The Table 20 considers the previous publications addressing the same robot selection problems.6,18,20,23,67,68 Considering the work by Bhangale 18 and Chakraborty 6 the sum of the weights is not equal to one. Now, considering the work by Chatterjee, 20 Rao 67 and Karande 68 the sum of the weights are equal to one, but the values of MTS or Maximum tip speed (MTS) in mm/sec and MC or Memory capacity (MC) in points or steps are assigned with the same weightings.
Though they all vary with slight difference in the weights, the prioritization for MTS remains the same in all the works. As a result, their rakings are nearly the same. But in case of Goswami’s work, 23 the value of the weights varies when compared with other works.6,18,20,67,68 Hence, the ranking obtained from Goswami’s work 23 differs according to the needs considered.
In addition to these, the ranking varies because of the prioritization of the criteria given by the decision makers. There occur variations in the values of the weights given for the criteria. Therefore, the ranking value varies accordingly. Moreover, the problems considered in6,18,20,23,67,68 are not worked under fuzzy environment. In this work, the robot selection was performed under IDF environment. Thus, the ranking of the robots in the proposed study varies with respect to the values of the weights defined for each criterion and so the variation arises in the ranking values of the robots.
Conclusion
Selecting a robot to the requirement of the company is an ultimate task for the decision maker. There are numerous robots with their own specifications. Therefore, selecting the best alternative robot according to the need is complicated.
This paper developed a hybrid model, which is used in the IDF environment. It aids the decision maker in prioritizing the robots and in finding the best alternatives for the particular application.
The novel hybrid method combines COPRAS and WASPAS models, where the entropy method was used in finding the weights for the criteria and the integrated COPRAS-WASPAS method was used in ranking the alternatives and in finding out the best manufacturing robots under IDF field.
This work was then carried onto the sensitivity and comparative analysis where, sensitivity analysis is tested by increasing the values of
The sensitivity and comparative analysis determine that the proposed method gives the finest approximation with better solution.
Further, the work can be extended by solving the robot selection problems with other MCDM models. In this study, the data set is collected from the literature. However, primary data collections can also be done. The comparison of the ranking orders with the real-time results is still lagging as they are not assured. However, this can be resolved in the future. Robot selection can also be done for other fields like military, medical field, etc., which serves as a future scope of this study.
Footnotes
Handling Editor: Chenhui Liang
Authors’ contributions
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Availability of Data and Materials
Data sharing not applicable to this article as no datasets are generated or analyzed during the current study.