
Abstract
As part of our study, which is a continuation of the research carried out by Dr. Anis HAMZA, Intelligent Neural Network Control for Active Heavy Truck Suspension Chapter of the book Advances in Mechanics and Mechanics. This working model is an intelligent, active suspension system with RNN (Recurrent Neural Network), which seeks the stability of heavy vehicles under all external or internal conditions (weight, mass, road deformation, acceleration, braking, etc.), to find a compromise between all these constraints. Standard control methods, such as (PID and LQR…) do not solve our multi-parameter problem. Our contribution is to exploit any servo system (PID, LQR, FUZZY, …). To train our LSTM (Long short-term memory) neural network with a Root Mean Square (RMS) rating value. Our method has proven effective by the results obtained. The view is an adaptation to classification, processing, and making predictions based on time series data, which is well in line with our suspension system that each moment depends on the previous state. The results have been confirmed by the ISO 26315 standard concerning the exposure of individuals to vibration and mechanical shock.
Keywords
Introduction
The shock absorber’s job is to keep the vehicle balanced while also ensuring good road holding and braking efficiency. A malfunctioning shock absorber can be a source of danger and will alter the safety of the driver and the vehicle, as well as the load carried throughout the journey. The risk increases proportionally if the acceleration is increased, if the vehicle takes curves that cause a significant balance (aquaplaning), if the vehicle moves on a poor road, or if at a speed of more than
The purpose of the car’s suspension is to isolate road irregularities while improving handling characteristics. The improvement in ride comfort and handling of the passive suspension is limited. Passive suspension limitations hamper ride comfort and suspension system handling improvements. These issues have prompted researchers to work on controlled suspension systems, such as active and semi-active suspensions. 2 The automobile industry began to develop controlled suspension for a number of vehicles, which saw the light of day in the early 1960s when Citron introduced active air suspension in luxury vehicles. These suspensions were still underperforming at the time due to underdeveloped technology.3,4 The 1980s saw the development of analog electronics, which explains the true beginnings of suspension at that time. 5 Since the 1990s, a new trend has emerged: “semi-active suspension or suspension with continuous/variable damping.” This becomes more and more evident with the best compromise between the cost of components, weight, comfort, power consumption, etc. 6 The right choice of suspension ensures driving comfort and vehicle stability, thanks to the action and feedback of forces between the ground and the vehicle. This leads us to an overview of the different types of suspension systems, which are classified into three categories (passive, semi-active, and active) 7 and to a thorough study of their servo systems.
Active and semi-active suspensions require a control system, that acts in real-time as a stabilizer under the desired constraints. There are two main classifications (linear and control), linear like (LQR, LQG, PID, etc.), and non-linear such as (SMC, MPC, probability control algorithms, neural networks, etc.). We investigated several solutions in this context in order to properly control a suspension system that meets safety and comfort requirements. 8
Artificial intelligence (AI) is part of our daily lives, at home and at work. It hides in our smartphones, computers, cars, and connected objects to protect us and simplify our lives. The best is yet to come if it has developed a lot in recent years. For this, we see robots that dance, sing, fly, save human lives, etc. It is not the strength of mathematical resolution but the magic of artificial intelligence; thanks to learning algorithms, artificial intelligence can learn and imitate human actions to reproduce them efficiently and faster. This wave of technology must be exploited and developed to find the best solution for our suspension problem, which plays a crucial role in the vehicle’s safety and driving comfort.
The problem is to use a topology which meets the requirement of stability and security, since the problem of suspension and a temporal phenomenon, therefore in need of an algorithm which processes the input data and takes into account data previous ones, in an order to output new state which will be processed later.
For this our contribution is to use the topology named LSTM (Long Short Term Memory), which will be explained later.
State of the art
In the design phase of a suspension system, three parameters must be taken into consideration (dynamic tire load, wheel deflection, and body acceleration) to achieve maximum driving comfort with good road holding.
Driving comfort is measured by studying the permissible limits of bodywork acceleration. In order to protect the driver and offer him maximum driving comfort, the body of the vehicle (suspended mass) must be isolated from any external disturbance (origin of excitation from the road or the resonance peak of the suspended mass). The limit of the frequency sensitive to the human being is of the order of 1 Hz. 9 For safe driving it is necessary to ensure the maintenance of the tire’s (unsprung mass) in contact with the surface of the road while reducing the resonance to around 10 Hz.
We can divide it into three major categories, which will be discussed further below: passive suspension, semi-active suspension, and fully active suspension. Passive suspension is composed of a spring and a shock absorber, which store energy in the spring and release it through the shock absorber. From the beginning of manufacturing to the present day, all types of suspension systems are faced with the problem of compromising between contradictory criteria such as driving comfort and vehicle stability (road holding). In a fully active suspension system, the actuator force can be applied to the system in the direction of or against the direction of suspension movement. The active system can store, dissipate or generate energy for both sprung and unsprung masses, although passive and semi-active suspensions only dissipate energy, while the semi-active suspension dissipates energy according to the suspension motion.
The spatial representation of force versus velocity represents this difference, see Figure 1 (unique feature or constraint of damping). A semi-active controller delivers forces in both semi-active quadrants, however, an active controller delivers forces in all four quadrants.

Classification of suspension systems according to the admissible region of the actuator. 10
Ride comfort depends on the road condition, in which the irregular shape of the road surface is transferred to the vehicle body and thus to the passengers, but also depends on the powers of the damper to generate contradictory forces that oppose the forces resulting from several factors (such as road irregularity, braking, ride quality, etc.). Driving comfort is defined by several standards such as ISO 2631-1-1997 and ISO 2631, which measure the comfort of driving.10,11
To stabilize an active suspension system, it is necessary to control the force of the actuator in order to quickly maintain more stability (reach the set value, equalize acceleration, and have the wheel respect the state of the road). This requires a servo system that compares the set value with the system state to effectively correct it, regardless of internal or external disturbances.
The system is feedback controlled; hence, it is called a closed loop.
According to the literature, there are several types of controllers that can be classified into three categories, such as linear, nonlinear, and learning-based controllers, for example 7 :
includes proportional-integral-derivative (PID) controller
model predictive control (MPC)
linear quadratic regulator (LQR)
sliding mode control (SMC)
feedback linearization control (FLC)
linear quadratic gaussian (LQG)
neural network
H-infinity
fuzzy logic
adaptive control
Each control technique has its specificity and its limits. Therefore, the choice of controller depends on the nature of the application and its requirements. The simplicity of design of the linear controller offers speedy implementation but with bad precision. The nonlinear controller offers robustness with the elimination of all sorts of disturbance and good trajectory tracking accuracy, this type of controller poses great difficulty in terms of setting (a bad setting gives an unacceptable result).
In the case of a learning-based controller, the result depends on the quantity and quality of data found in previous studies. The availability of data poses a great problem to the neural network builder, and this technique relies on errors of approximation and uncertainty: the developer must master artificial intelligence to overcome these difficulties and have a satisfactory result.
To overcome the difficulty of parameterization and improve the precision of the servo-control, we can combine two techniques, such as artificial intelligence and a nonlinear controller.12–21
Suspension systems
The suspension is one of the most important parts of an automotive system, mainly for the safety and comfort of driving. The suspension system is a set of tires, springs, shock absorbers, and connectors to connect the vehicle to its wheels, allowing it to have stable and reasonable travel. 22 Generally, according to Fares and Bani Younes, 23 the suspension system consists of three main elements:
A structure that holds the vehicle’s weight;
Spring converts kinetic energy into potential energy; or vice versa;
Dampers are designed to dissipate kinetic energy.
Active suspension
Compared to previous systems, the active suspension system consists of an actuator that can provide active force controlled by an algorithm using information from sensors mounted on the vehicle. The active suspension system consists of a transmission mechanism and a mechanical spring.
These systems are more capable of responding to force generation caused by unexpected changes in the road. With the right control methods, active suspension can lead to a compromise between ride comfort and handling.
Most researchers recognize that this type of system is one of the best, with excellent parameter management capabilities, in order to improve its overall performance. 24 Even so, it is a complex and expensive system, which explains the small number of high-end car or truck models used. (Figure 2). 25
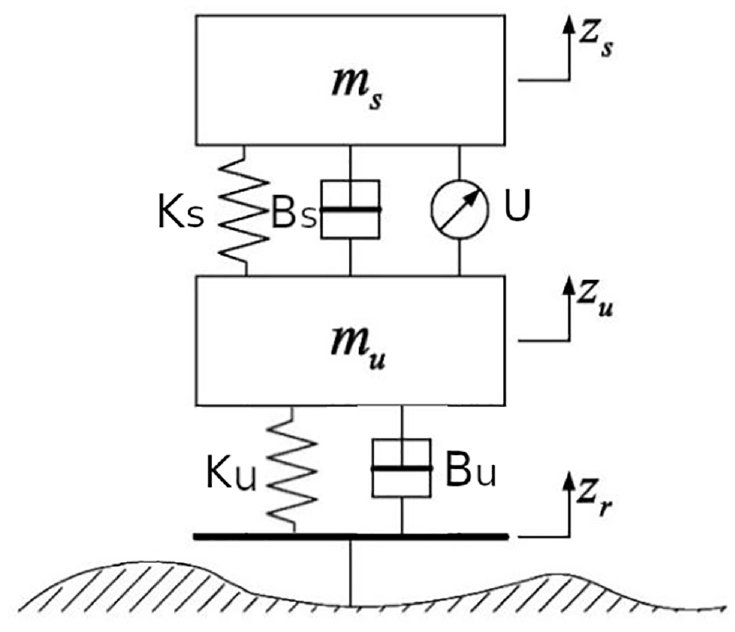
A theoretical model of the active suspension system.
Mathematical formula
Our active suspension model is composed of two degrees of freedom (Figure 2), which include sprung mass
Sprung mass:

Unsprung mass:

Impact of vibration on the human body
Nearly 20% of fatal road accidents involve driver fatigue. Researchers have recently discovered that vibrations caused by the vehicle affect driver alertness and may play a role in falling asleep. 27
In the long term, the most intense vibrations can lead to risks for the health of the driver, in particular, lower back pain (lumbalgia), herniated disks, etc. 28
We can assess the exposure of the human body to vibration transmitted by the vehicle, and the method is defined in the ISO 2631 standard. The RMS calculation makes it possible to evaluate the vibration of the suspended mass and its impact on the human body. (RMS) the acceleration, which is defined as follows:

RMS: Acceleration (
T: Time (s)
Suspension control system
The actuator control system is an essential component of the active suspension system because it works like a regulator by applying a force between the suspended and the unsuspended to form a dynamic system based on state variables, ensuring a better ride quality and excellent vehicle handling by maintaining wheel contact with the road surface. The actuator requires a servo system whose purpose is to reach the set point faster and maintain it, in our case with fewer unsprung mass frequencies (no acceleration at all). There are several control techniques and algorithms like a neural network, fuzzy logic, iterative control, vector control, scalar control, etc. However, all control techniques have advantages and limitations.7,29
A PID (Proportional-Integral-Derivative) control system is a closed-loop system or process. It is simple and easy to implement, but the linear feedback structural model does not support constraints and cannot handle multiple inputs and outputs at the same time.
LQR (Linear Quadratic Regulator) control system: cannot solve steady-state errors, the main problem being tuning the variables Q and R.
H∞ (H-Infinity): despite the accuracy, robustness and ease of implementation, we are faced with the complexity of the design.
Fuzzy logic: Provides an effective solution for a complex model, but it is difficult to design its control rules and analyze its system.
Proposed solution
Two types of algorithms can be distinguished: supervised and unsupervised. Supervised algorithms are suitable for cases where we have a priori knowledge of the problem (an algorithm without data is blind, and data without algorithms is useless). Unsupervised algorithms operate when no prior knowledge is available. Our solution is to exploit the results of experiments found by other methods. We devoted 80% of the data to a learning phase and 20% to the test phase.
Our suspension system operates sequentially. At any time, it is necessary to give a signal to the actuator to generate a force to fill the instability in the system according to the previous state. We have chosen a recurrent neural network to handle our sequential suspension system. For our problem, RNN (recurrent neural networks) are the best solution. The recurrent neural network is made up of neurons connected in a recurrent way, interacting non-linearly. The output of a neuron is a non-linear combination of its inputs.
Figure 3 depicts the main diagram of an RNN-based operating suspension system. It is divided into two general parts. The (Training Model) section deals with the training process based on optimal values (road surface, inflated mass acceleration and displacement, unsprung mass displacement, and RMS acceleration). As the learning process becomes more convergent, the final neural network, as shown in the learning phase, is retained as a strategy. The downloaded strategy can be used directly online in the “test models” section.

General diagram of RNN-based active suspension control system.
Modeling of an active suspension system with deep-learning (RNN)
Suspension stability research is now growing at an exponential rate among the most commonly used servo solutions, such as linear control algorithms (PID, LQG, LQR, etc.) and nonlinear mathematics (infinite H, neural networks, SMC, fuzzy logic, etc.). Our goal is to leverage all available servo testing as a source of data to create a more complete and optimal solution in the face of complex and conflicting parameters. For example, unsprung mass stability parameters, wheel adhesion parameters on the roadway, etc. As a result, Deep learning is a problem solver. Where, this method overlays many layers of neurons with different types of neural networks to find an optimal model of this problem.30–33
Since suspending behavior is evolutionary and iterative, this directs us to the most suitable algorithm: that is, a cyclic neural network RNN, which is a layer of neural networks that adapts perfectly to sequential data, using the previous outputs as additional inputs, is suitable for our mechanical suspension. 34
The working principle of our intelligent servo system architecture is based on the long short-term memory (LSTM) network. It begins with a learning phase of the data collected from other types of servo systems such as PID and LQR. The input and output data are shown in the following diagram (Figure 4), which has a new RMS column as an exception, a stability factor according to the standard ISO 2631. The RMS values serve as a reference index for the stability behavior.

Structure of the LSTM base unit.
After the learning phase, a test phase will be performed with the new input values. Our neural network must exert the appropriate force on the actuator to meet the new requirement for RMS stability.
A more precise neural network structure is the Deep Neural Network LSTM. Includes an input, a hidden layer, a classifier, and an output layer the hidden layer is usually sufficient to consist of an adequate number of neurons that take data from one or more inputs and compute the output. Output is calculated using an activation function (Table 1).
List of activation functions.
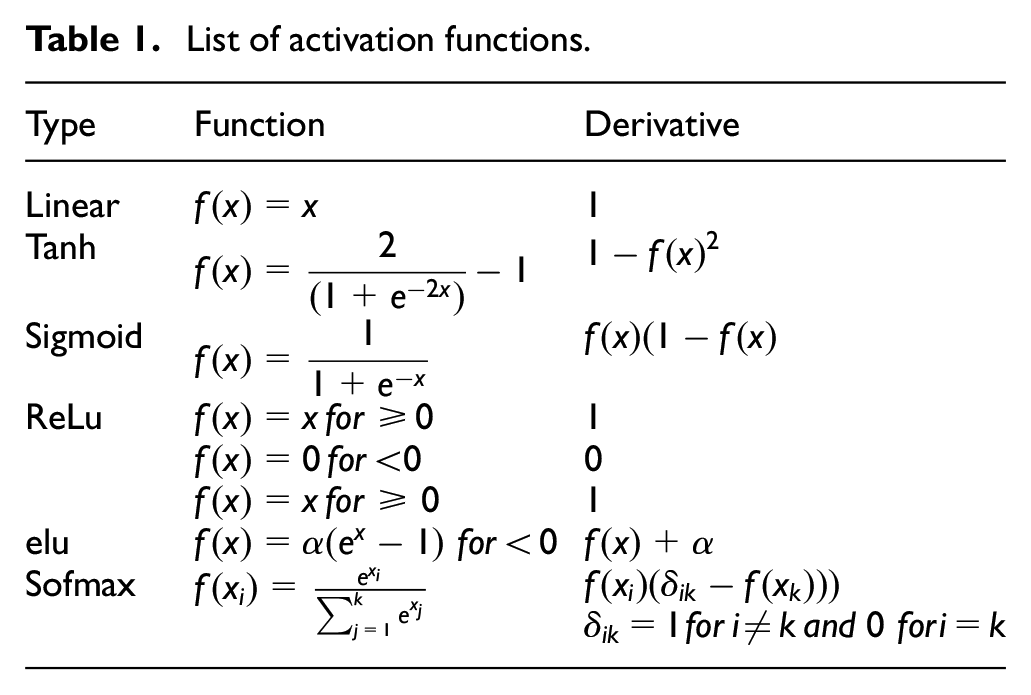
A math function is an activation function. That is, it takes the resulting sum as input and uses RNN processing to convert it into the final output of a node. (Figure 5).

The conceptual model for deep LSTM neural network topology. 35
Result and discussion
The most frequent problem in the case of processing a system over time is the amount of information accumulated in the ordinary RNN neural network and the difficulty of identifying and depending on valuable data. This requires using a neural network with long and short-term memory (which corresponds to LSTM). This technique allows the forgetting door to keep only the relevant information.
This part includes a description of the simulations performed, using classification and regression schemes to analyze the performance of the proposed algorithm.
After configuring the neural network model (the algorithm, input and output data types, activation functions, and the number of hidden layers). In this case, data calculated from the passive and active suspension must be used throughout the training phase with a PID controller (proportional, integral, derivative). Various parameters have been corrected throughout the test phase (such as the number of epochs, the hidden layers, the hidden units, the types of optimization, and the activation functions) to properly optimize the neural network with the minimum Mean Squared Error (MSE). In order to train the LSTM neural network.
The use of the different activation functions (such as sigmoid, rectified linear unit (ReLU), softmax and tanh), Table 1, to optimize the output of the neural network within a certain limit. Then, after a certain number of tests, find the best value of the parameters to optimize the convergence of the root mean square error RMSE with a shorter learning time.
After completing the training phase, a test period is analyzed while comparing the new desired RMS with the predicted RMS to check the reliability of the neural network.
Figure 6 shows that after a lossy training phase, throughout many epochs equal to 100, the calculated MSE quickly converged after about 10 epochs (Values going from 0.12 to 0.116). The convergence behavior indicates that the LSTM neural network will be more efficient. When the performance degradation exceeds a certain threshold, the optimal suspension stabilization converges with the initialized RMS.

MSE loss function of the LSTM algorithm as a function of epochs.
The use of 14,000 vectors of data was distributed as follows 80% for the training phase and 20% for the test phase. The LSTM model used in this solution is composed of three layers of LSTM with 512 neurons per layer, and to avoid overfitting the neural network, we add 0.25 Dropout after each layer and finally, a Dense final layer to produce the outgoing values.
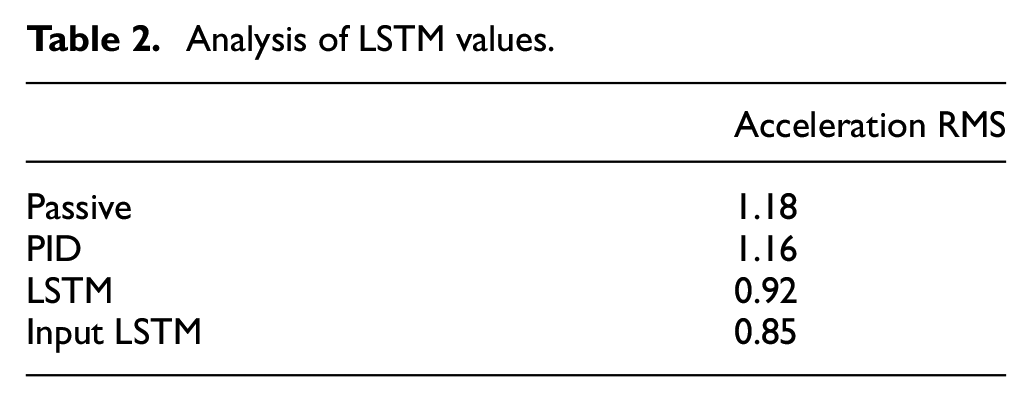
After several tests and verification of model performance, the activation functions are “tanh” and Mean Squared Error for losses and “adam” as an optimizer. The prediction phase of a suspension control with the desired RMS acceleration of 0.85 demonstrates a significant decrease in the acceleration of the suspended mass of 0.92 compared to the given used throughout the phase d drive (PID and passive) that exceeds 1.16 of RMS acceleration. This shows the reliability of this model, which dampened the acceleration well. To achieve the desired acceleration, the studied model will correct the suspension in any road condition.
After the learning phase, a new RMS of the suspended mass’s acceleration is calculated.
The following table summarizes the results obtained.
Figure depicts the temporal performance of the suspended mass ms for a road stress Zr(t) of the long obstacle type.
The figure represents, respectively, the displacements according to different types of servo-control: PID, passive, and the predictive method with LSTM. Furthermore, the Figure 7 depicts the relationship between the acceleration of a passive shock absorber and the suspended mass of an active shock absorber. These plots show that:
The performances of the models of active suspensions are symmetrical in the phases of rise, descent, of the long obstacle.
The performance of a passive shock absorber is asymmetrical in the two phases of ascent and descent of the long obstacle.
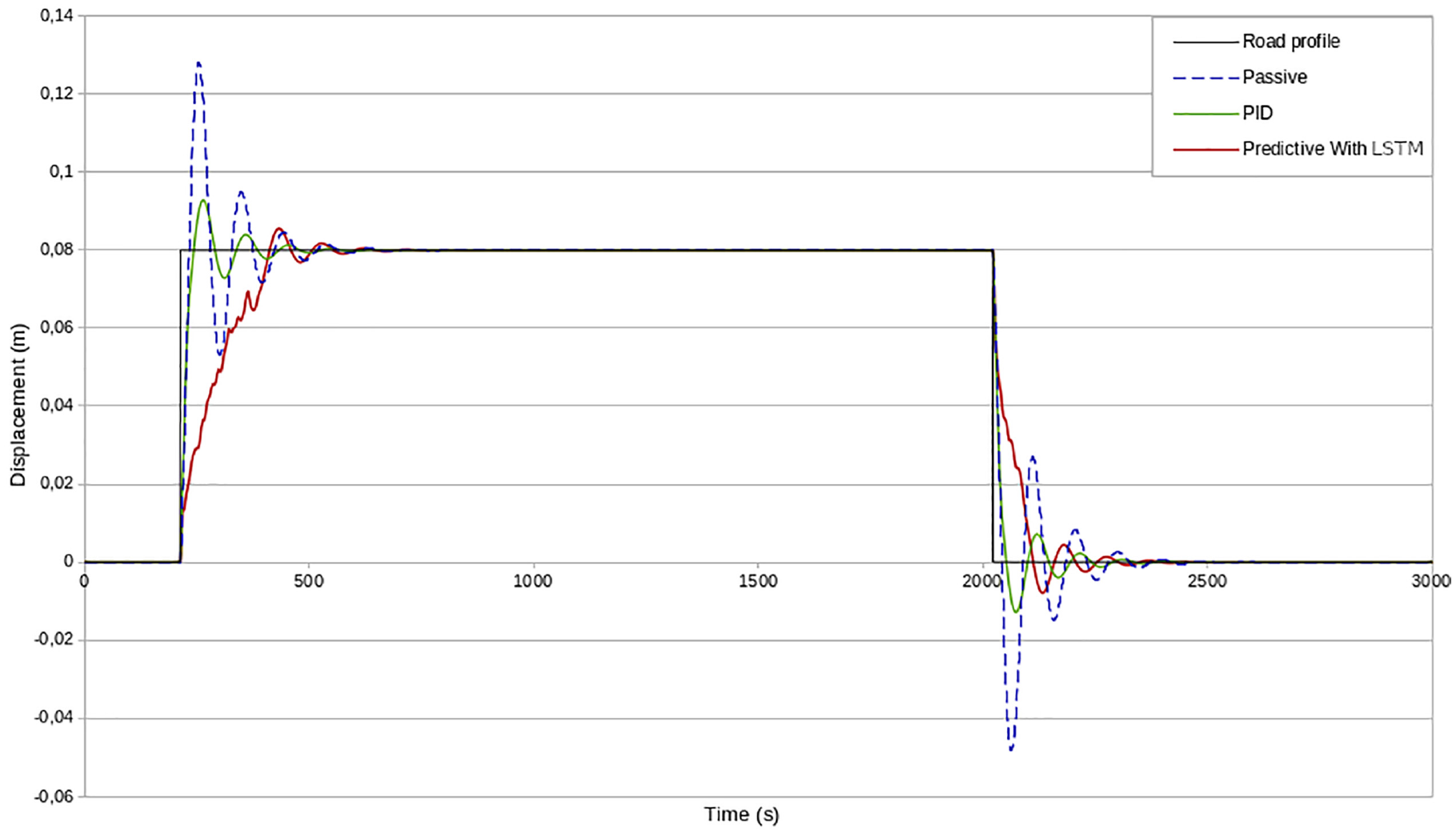
Comparison of vehicle body vertical displacement between passive and active suspension.
In terms of displacements of the suspended mass, the active suspension system has a very damped response (almost no oscillations). However, the passive and PID-controlled suspension systems exhibit periodic behavior that is less damped. Thus, the active suspension system provides a lower level of acceleration, as can be seen in the Figure 8. Therefore, the model provides good value to the actuator, which generates the effort necessary to dampen the acceleration of the suspended mass, which generates more comfort for the driver.

Vehicle body vertical acceleration comparison.
The acceleration of the suspended mass controlled by artificial intelligence shows a significant decrease compared to the passive suspension, it manages to decrease more than 50% of acceleration, which shows the effectiveness of the LSTM model used (See Table 2), and encourages researchers to further enrich the neural network to have more precision and stability of the acceleration, (Figure 8).
Analysis of LSTM values.
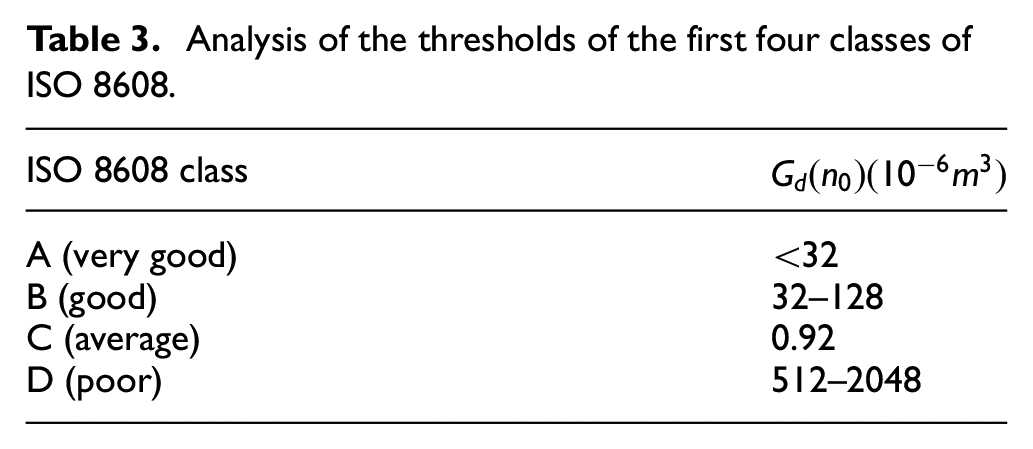
The suspension model is tested on several random road profiles according to the ISO 8608 standard, 36 which classifies the road roughness from class A to class H based on the PSD (power spectral density) as shown in the Figure 9 The classification is represented by straight lines with slopes on the log-log scale, in this figure there is a relationship between the PSD and the spatial frequency.

Presentation of various road roughness class according to ISO 8608 standard use in the model. (a) Classification of road roughness according to ISO 8608, classes A to H 37 and (b) the various PSD of classes used to excite the model controlled by LSTM.
According to ISO 8608, Class A road is considered to have a good quality road profile with a road roughness coefficient less than
The simulated suspension system for a speed of 50 km/h and the recurrent neural network is excited by several road profiles classified according to the ISO 8608 standard from class A to class F. The results show that the behavior of the suspension system is more stable in classes B, C, D, and E. Despite road roughness classes A and B showing less stability, they are but still better than the passive suspension Figure 10.

Movement of the suspended mass on different types of road (A, B, C, D, E, and F). (a) Class A, (b) Class B, (c) Class C, (d) Class D, (e) Class E, and (f) Class F.
Using the adjusted PSD, the entire frequency content can thus be described with two parameters,

n: spatial frequency
Analysis of the thresholds of the first four classes of ISO 8608.
Conclusion and perspective
Considering the ability of neural networks to deal with unstructured problems, predict outcomes, and classify and analyze data, we chose the ANN (Artificial Neural Network) as the tool to solve our active suspension. We initially developed a database extracted from a literature study is based on the ISO 26315 standard that studies driver comfort, with a sample of condition types on a different road.
To ensure driving comfort, the RMS (Root Mean Square) acceleration was included as an input parameter along with the acceleration of the inflated mass, to the neural network. The output parameter, is the force of the actuator.
After the learning and convergence phase of the neural network.
We will confirm our results with a regression curve between the actual value and the predicted value based on a comparative study between the found and documented values to confirm the uniqueness of our results. Several road state classes are tested and show good efficiency of RNN recursive neural network (LSTM). The results show that the system gives a good value to the damper actuator to stabilize it as much as possible according to the desired RMS value.
Our perspective is to enrich the learning phase with other servo systems such as (linear-quadratic regulator (LQR), fuzzy logic, linear quadratic Gaussian control (LQG), and …) and broaden horizons so that it can function optimally in critical situations.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.