
Abstract
For nonlinear optimization problems involving interval variables or parameters, the interval possibility degree or interval order relation is conventionally adopted to convert them into a deterministic corresponding counterpart and then can be solved with linear programing approaches, through which computational resources and costs have been preserved to a certain extent. However, some information and computational accuracy will be discounted during the model transformation. In this paper, an interval optimization algorithm based on particle swarm optimization is proposed aiming to cut down the loss of useful information by means of straight optimization instead of model deterministic converting so as to enhance calculation accuracy with few growths of computing expenses. The proposed method firstly employs an interval satisfaction value to cope with the constraints. Consequently, the particle swarm optimization method is used to seek the optimum solution sets without the model deterministic converting. And a criterion based on the satisfaction value model of interval possibility degree plays the role in individual selecting out of the above solution sets. Finally, the effectiveness of the proposed method is verified by investigating four examples.
Keywords
Introduction
More often than not, the uncertainty exists in the practical engineering problems as aleatory or epistemic reasons. 1 Studies have shown that if the above mentioned uncertainties are ignored or simplified in engineering optimization, it will often lead to markable large errors and even get opposite conclusions.2–4 Therefore, reducing the error and improving the reliability have become the research goals of some scholars.5–7 In order to acquire more reliable optimization results, uncertainties in practical problems should be considered in sync with the corresponding uncertain optimization algorithms. So far, many savants have issued some corresponding optimization algorithms to cope with the uncertain parameters which can be mainly divided into three categories: stochastic programing, fuzzy programing and interval programing. Stochastic programing8–11 transforms the optimization problem into a stochastic programing problem based on the hypothesis that its probability distribution function is acquirable in advance. Fuzzy programing12,13 transforms the optimization problem into a corresponding fuzzy programing problem by assuming that its membership function is foreknown, thereby using a fuzzy set to represent its corresponding uncertainty constraints. Interval programing14–19 usually obtains the appropriate parameter variation range by determining the upper and lower bounds of parameter variation and directly treating the interval as a whole to solve.
From an implementation perspective, although stochastic programing and fuzzy programing can describe uncertainty more accurately, their application is limited in some special cases because a large number of test samples are needed to construct probability density function or membership functions. Fortunately, interval programing merely needs to know the upper and lower bounds of the interval uncertain parameters instead of the specific value of the probability density of uncertain parameters. Not affecting the solution accuracy or causing over conservative results under some conditions, interval programing is more and more popular for engineers and technicians due to its advantages of lower test cost and excellent comprehensibility. Recent decades have seen studies on interval programing accompanied by a series of effective interval programing models and methods.20–22 Among them, in the community of linear programing involving interval variables, Ishibuchi and Tanaka 23 proposed the interval order relation to transform the interval objective function maximization problem into a multi-objective optimization problem. Elishakoff et al. 24 proposed a structural optimization design method that describes the design problem as a two-level optimization problem with bounded uncertain loads. Elishakoff 25 compared the probabilistic modeling and convex modeling of uncertainty, and proposed combinatorial optimization and anti-optimization based on uncertainty. Huang et al. 26 developed a two-step method through directly conveying the uncertain factors into the linear programing process and then obtained the final decision. As for optimal solutions obtained by the two-step method may not be within the scope of decision space, Wang and Huang 27 improved the above mentioned method by appending additional constraints to the optimization model. Lai et al. 28 defined the effective solution based on interval order relation and the method can use the non-inferior solution defined by the second-order relationship between intervals to deal with linear optimization problems. Elishakoff and Ohsaki 29 took full advantage of anti-optimization through a combination of structural optimizations to produce optimal designs considering worst-case scenarios. Rivaz and Yaghoobi 30 proposed the minimal and maximal regret solution of the multi-objective linear programing problem with interval objective function coefficients. Santoro et al. 31 introduced parametric interval analysis to solve interval equations by optimization and anti-optimization problems. The method proposed by the above scholars are more suitable for solving linear optimization problems. Nevertheless most practical engineering problems are nonlinear or even strong nonlinear. For those more general nonlinear programing problems, some productive works have been derived. Cao and Huang 32 studied the first derivative of the objective function, constructed the interval expansion function with at least second-order convergence, and introduced the interval monotonicity rule to solve it. Qiu and Elishakoff 33 proposed an inner layer optimization method based on interval analysis and laid the mathematical basis of convex models. Jiang et al. 34 proposed an optimization method for solving uncertain structural problems based on nonlinear interval number programing method and interval analysis method. Jiang 35 proposed two transformation models of nonlinear interval number optimization, which realized the transformation from uncertain optimization problem to deterministic one. Elishakoff and Miglis 36 performed deterministic analysis of uncertainty problems by describing variation of various inner properties or external influences on the system are parameterized using trigonometric functions. Li et al. 37 transformed the interval uncertain model into a nested deterministic model, and then solved the transformed deterministic model according to the adaptive interval multi-objective optimization method and non-dominated sorting genetic algorithm. Wu et al. 38 used high-order coefficients of approximate Taylor inclusion functions to solve the extension problem of interval algorithms. The algorithm uses interval algorithm to optimize inner loop. Hu et al. 39 proposed a new robustness index to deal with the bounded constraints of performance variation, and transformed an interval robust optimization problem into a deterministic optimization. Xie and Liao 40 developed an enhanced programing approach to decouple the optimization problem considering correlation between interval parameters. Wang et al. 41 proposed an interval uncertain optimization method using genetic algorithm to optimize the inner layer and non-dominated sorting genetic algorithm to optimize the outer layer. Wang et al. 42 proposed a Legendre polynomial expansion method combined with subinterval technique to optimize nonlinear interval uncertain problems. Rahman et al. 43 proposed the concept of type-2 interval order relation and type-2 interval valued function. Tang et al. 44 proposed interval sequence linear programing to solve nonlinear robust optimization problems. Wei and Li 45 proposed an interval optimization method based on adaptive binary decomposition algorithm.
Among the above mentioned methods for solving nonlinear interval optimization problems, some need to know the membership function or probability density function, some are only suitable for solving problems with low uncertainty levels, and most need to transform the uncertain optimization model into the deterministic optimization model. In this transformation process, some useful information of uncertain parameters will be lost, which will lead to the error between the optimal solution of the optimization model and the real solution without reflecting the uncertainty in practical problems. Therefore, some attempts try to solve the nonlinear interval optimization model directly without deterministic transformation recently and few research results have been presented in this community. Cheng et al. 46 proposed a constrained interval optimization model and a new concept of interval order relation based on the priority criterion of the degree of interval constraint violation, the design vectors were directly sorted by the interval and then a direct interval optimization implemented by means of a nested genetic algorithm and Kriging technique. Fu and Cao 47 proposed an interval differential evolution algorithm with adaptive subinterval decomposition analysis which eliminated the double-loop nesting optimization and improved the computational efficiency while ensuring accuracy, and used adaptive subinterval decomposition analysis to calculate the bounds of objective functions and constraints in the uncertain domain. However, the research on directly solving interval nonlinear uncertain optimization model is also in primary stage. There are remaining some problems such as: 1. Which optimization algorithm should be chosen as the solution tool to guarantee the computational efficiency? 2. What criteria is the proper one to select a more appropriate optimal solution? Particle swarm optimization (PSO) is a parallel structure, which determines the next position of the particle according to the current individual optimal position of each particle in the particle swarm, the current global optimal position, and the individual’s inertia. The algorithm is simple and easy to implement. Therefore, this paper proposes an interval optimization model based on PSO and an interval preference judgment criterion based on interval satisfaction value to deal with the above problems. In practical applications, the optimization of vehicle ride comfort and the stability of aerial camera in work are to improve the overall performance. Therefore, when solving the above problems, the accuracy and reliability of the obtained results are particularly important. As the above problems are nonlinear involving interval parameters, the direct method can be employed. In this paper, the proposed method is investigated in engineering examples including the eight-degree-of-freedom dynamic optimization model of the vehicle and the robustness optimization of the aerial camera. The remainder of the paper is organized as follows: Section 2 introduces the expression of the nonlinear interval optimization problem. Section 3 presents interval particle swarm optimization and describes the details of the proposed algorithm in detail. Numerical example and application verify the effectiveness of the proposed method in Section 4. Section 5 gives the conclusion of this paper.
Statement of the problem
Interval numbers are defined as a pair of ordered real numbers:

where

where


The nonlinear constrained optimization problem is expressed as follows:

where
In practical problems,

where
The interval order relation transformation model can solve the nonlinear interval optimization problems. The interval order relation transformation model is to extend the linear interval number optimization method based on order relation to general nonlinear problems and transforms the uncertain optimization problem into a deterministic multi-objective optimization problem.
For solving the maximum and minimum optimization problems, there are the following five forms
48
: interval order relation of preference for upper and lower bounds
Select
(1) Maximum optimization problem:

(2) Minimize optimization problem:

The value range of the objective function


According to equation (10), the uncertain optimization problem in equation (6) is transformed into a definite multi-objective optimization problem by judging the midpoint value and radius value of the objective function, which is expressed as follows:

The interval of the uncertain objective function is solved by twice optimization:


Through the above processing, the converted model is determined as follows:


Optimization based on the above optimization method requires model transformation, which is easy to lose information. In order to reduce information loss and improve accuracy, an interval particle swarm optimization (IPSO) based on PSO is proposed.
Interval particle swarm optimization (IPSO)
Particle swarm optimization
PSO is inspired by the research on the simulation between the movement and the swarm in the process of birds foraging, to develop an algorithm to solve the optimization problem.
49
In this algorithm, the particle swarm are initialized randomly in the initialization range, including the initial position

IPSO
IPSO is an optimization algorithm for solving nonlinear interval optimization problems based on PSO. The algorithm uses interval satisfaction values to deal with interval uncertainty constraints. Based on the interval possibility satisfaction values model, it will establish an interval preference criterion to solve the nonlinear uncertainty optimization problem caused by interval uncertainty.
Interval satisfaction value and constraint treatment
In order to construct the interval possibility satisfaction model and realize the processing of interval constraints, a left truncated interval possibility model based on the reliability-based possibility degree of interval (RPDI) model
50
is given to quantitatively describe the degree of one interval greater than (or better than) another. For intervals

When the interval

(1)
(2) If
(3) If
Based on the left truncated interval possibility model, the concept of interval possibility satisfaction value is proposed below. For intervals

where
(1)
(2) When
(3) When
It should be pointed out that for the same set of intervals

where

According to the overall interval possibility satisfaction value
(1) When
(2) When
Individual preference strategy based on interval preference criterion
Under the framework of IPSO, how to select excellent individuals from the target vector individuals to retain the next generation of the evolutionary population is directly related to the overall performance of IPSO. This paper establishes an interval preference criterion based on the above interval possibility satisfaction value model to realize individual preference, as shown in Figure 1. Assuming that
(1) When
(2) When
(3) When
(4) If
(5) When

Individual preference strategy based on interval preference criterion.
Flow chart of IPSO
Based on interval satisfaction degree and interval preference criteria, this section proposes an algorithm to directly solve nonlinear uncertain optimization problems with interval parameters, namely, IPSO whose flow chart is shown in Figure 2. Detailed iteration steps are as follows:

Flow chart of interval particle swarm optimization.
Examples and applications
Numerical example 1
The following constrained interval optimization problem 35 is used as an example:

For this example, the parameters are set as follows: population size
IPSO proposed in Section 3 is used to solve the above interval optimization problem. The maximum number of iterations is given as the stopping criterion. The optimization results under different interval possibility satisfaction values are shown in Figure 3 As can be seen from Figure 4, the optimal target value converges at the 11th generation. This proves that the proposed algorithm can efficiently solve the interval optimization problem with small uncertainty. The optimal solution is

Optimization results under different interval possibility satisfaction values.

Convergence curve of example 1with
The optimal solution of equation (22) is
Comparison of optimization results.

Numerical example 2
The following constrained interval optimization problem 51 is used as an example:

For this example, the parameters are set as follows: population size
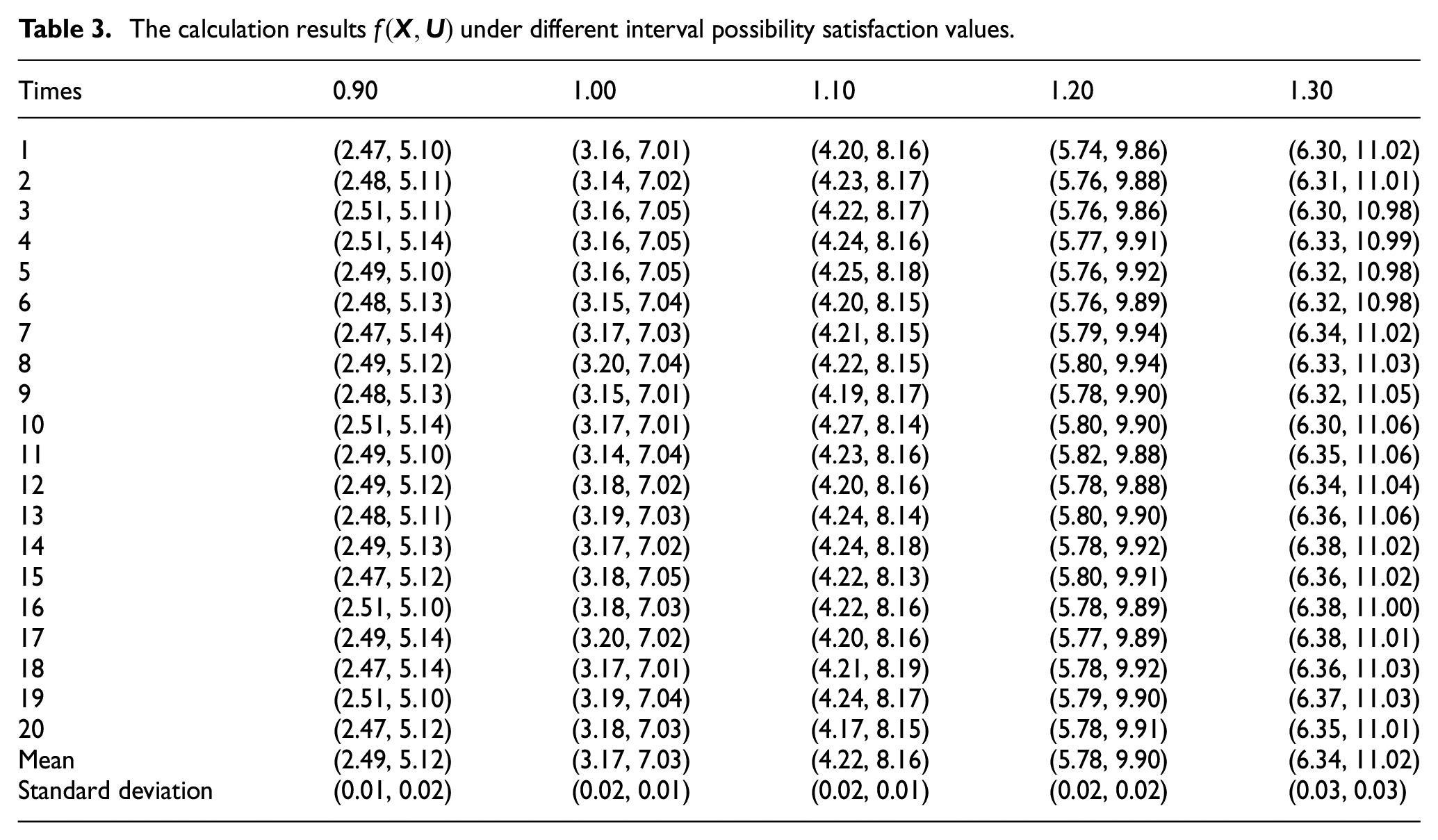
Due to the random errors in IPSO calculation, the mean of 20 times of calculation is taken as the final result. Results of 20 calculations are shown in Tables 2 and 3. The optimization results under different interval possibility satisfaction values are shown in Figure 5 When the interval possibility satisfaction value is 1.0,
The calculation results

The calculation results

Optimization results under different interval possibility satisfaction values.

Convergence curves for example 2 under different
In order to verify the accuracy and effectiveness of the proposed method, a comparison is made with Fu et al.’s method in.
51
The comparison results are shown in Table 4. The relative errors of the IPSO’s optimal solutions are respectively 0.87%, 2.15%, and 5.89%. Therefore, IPSO has better accuracy. IPSO calls only
Comparison results for example 2 under interval possibility satisfaction value 1.

Application of eight degrees of freedom vehicle body vibration model
The vehicle with four-wheel independent suspension is simplified as a spatial eight-degree-of-freedom dynamic model shown in Figure 7 Eight-degrees-freedom dynamic model. The parameters are selected as follows: the front and rear tire mass

Eight-degrees-freedom dynamic model of a vehicle.
The following optimization models can be established:
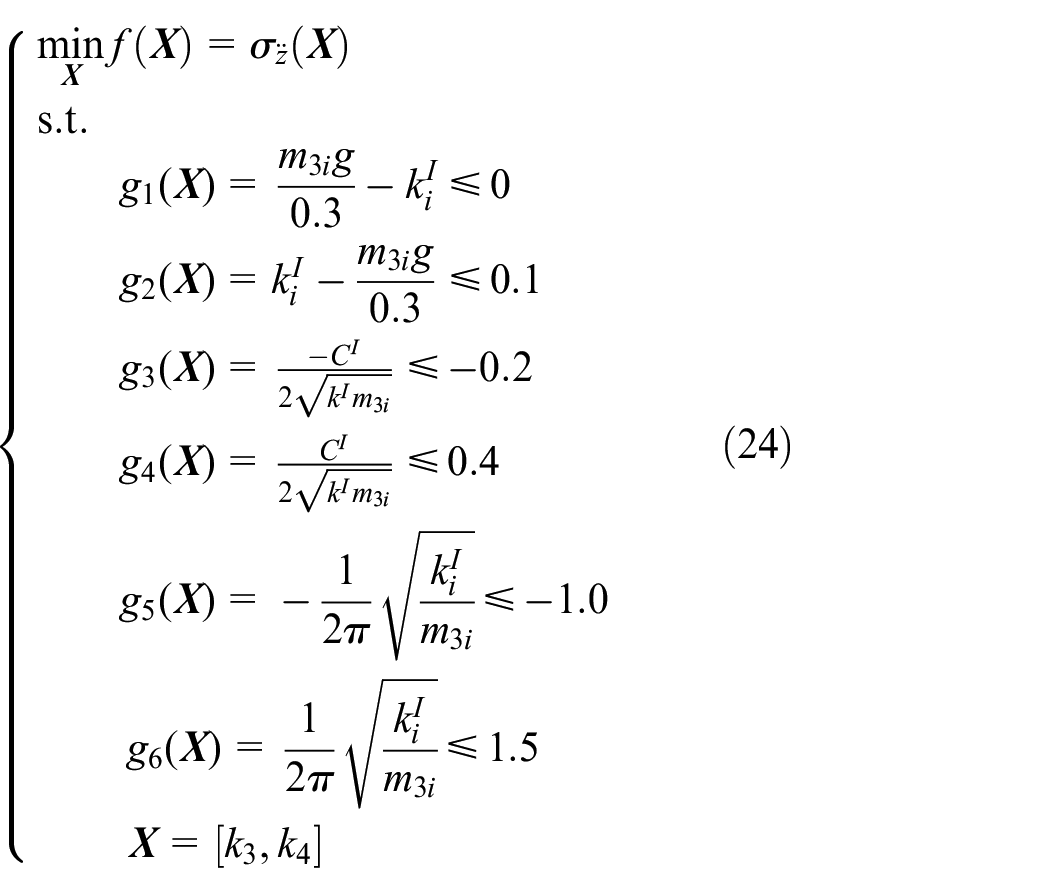
In the formula:
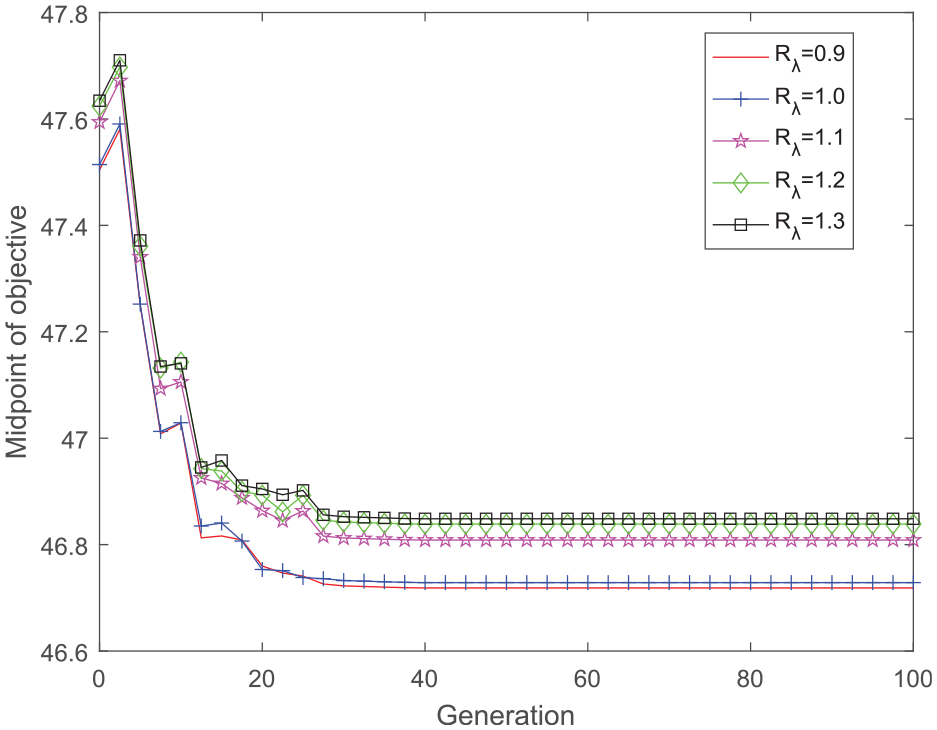
The optimization results are shown in Figure 8 and Table 5. It can be concluded from the optimization results that the upper and lower boundary values and the midpoint values of the objective function also increase with the increase of the interval possibility satisfaction value. When the interval possibility satisfaction value is 1, the optimal solution

Optimization results under different interval possibility satisfaction values.
Interval optimization results under different interval possibility satisfaction values.


Convergence curve of example 3 with
Application for an aerial camera system
Aerial camera system is composed of unmanned aerial vehicle and aerial camera. 52 And the aerial camera is the most important remote sensing sensor in aerial camera system, which needs to maintain stable and reliable performance at work. In the process of its robust optimization design model involving interval variables established in Tang et al., 44 the method proposed in this paper might be adopted as the solving approach as well. The finite element model of the lens, the motherboard, the filter and the housing are shown in Figure 10. By assigning different boundary conditions, the finite element analysis results of temperature and displacement under high temperature conditions and the dynamic analysis results under strong vibration conditions are shown in Figure 11. Considering the two conditions of temperature and vibration, the robust optimization of aerial camera can be obtained as:
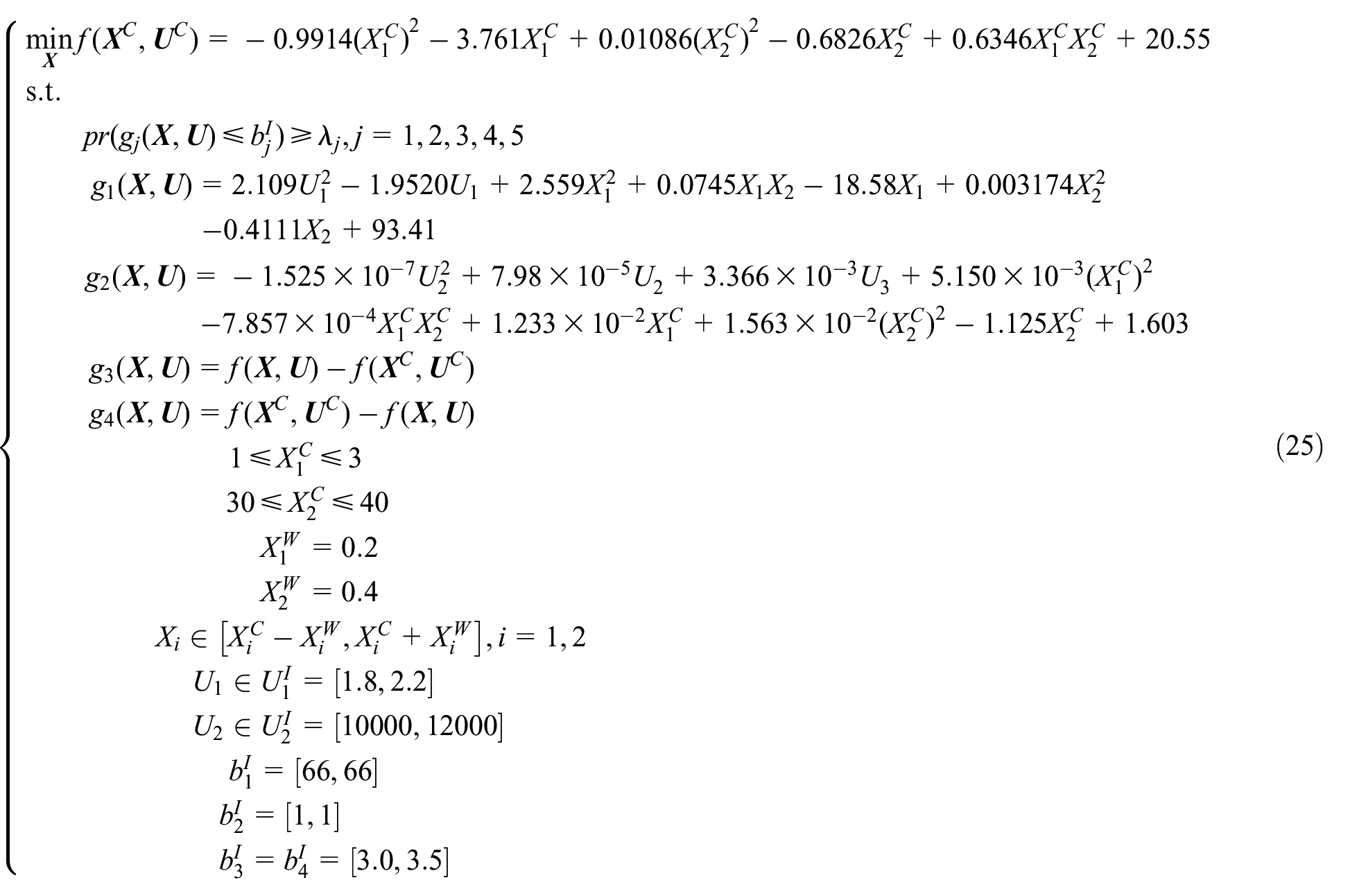
where the nominated value of design vector is

The finite element model of the aerial camera: 44 (a) profile view and (b) sectional view.

The finite element analysis results of the aerial camera: 44 (a) the high-temperature condition and (b) the vibration condition.
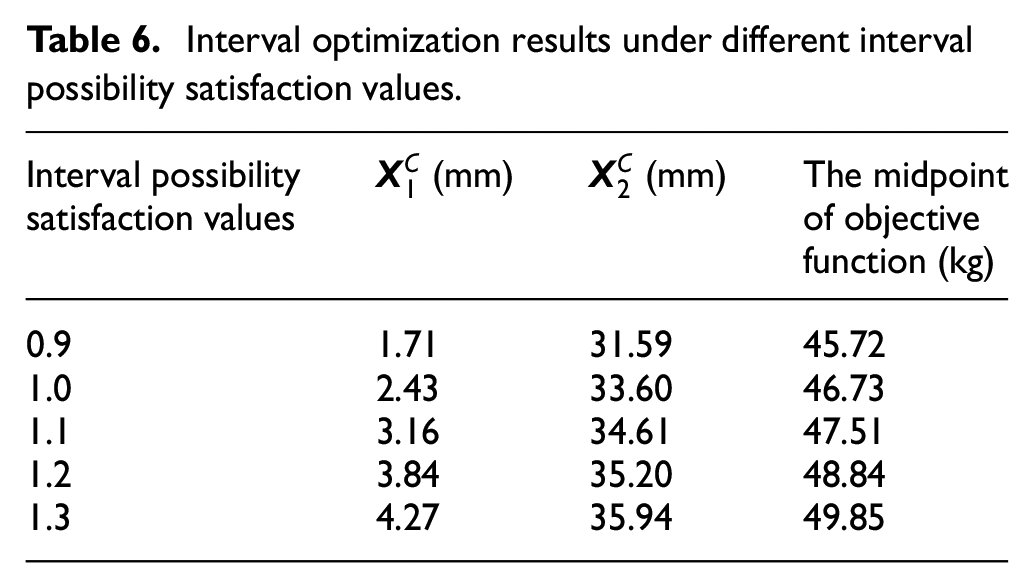
The interval optimization results with different interval possibility satisfaction values are shown in Figure 12 and Table 6. The convergence curves under different

Optimization results under different interval possibility satisfaction values for example 4.
Interval optimization results under different interval possibility satisfaction values.
Curves of convergence for example 4 under different
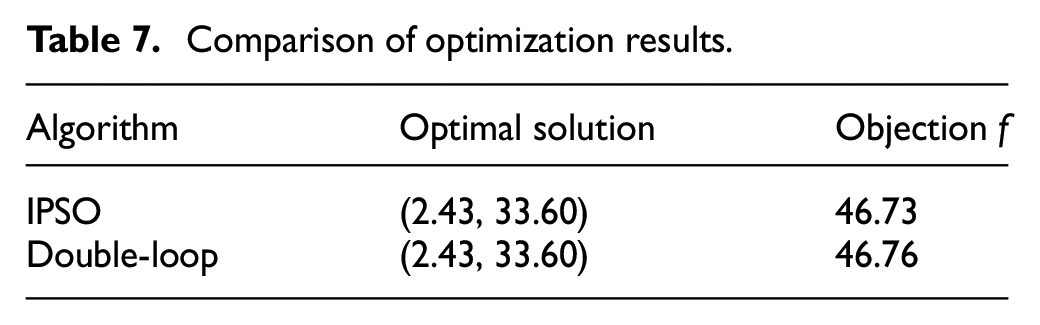
Comparison of optimization results.
Conclusion
In order to solve the problem involving the loss of some information and accuracy in the process of converting a nonlinear optimization model containing interval variables or parameters into a deterministic model using interval possibility or interval order relationship. In this paper, an interval optimization algorithm based on PSO is proposed, which aims to reduce the loss of useful information through straight optimization instead of deterministic transformation for the interval model so as to improve computational accuracy with a small increasing in computational cost. The method firstly uses interval satisfaction value to deal with constraints and consequently a particle swarm optimization algorithm is proposed to find the optimal solution set without deterministic conveying for the nonlinear interval optimization model. The individual selection in the above solution set is implemented by means of the criteria based on the interval possibility satisfaction value model. Finally, the effectiveness of the proposed method is verified by four examples. The results show that the algorithm has advantages in solving constrained interval optimization problems with arbitrary uncertainty levels, and the result is valid.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Hunan Provincial Natural Science Foundation of China (Grant No. 2021JJ40205), the China Postdoctoral Science Foundation (Grant No. 2021M690988), and the National Natural Science Foundation of China (Grant No. 51905165).