
Abstract
To improve the performance of a conventional rescue equipment, we designed a novel multi-functional rescue end-effector comprising a separation mechanism and a grasping mechanism. The failure causes of the separation mechanism are analyzed, and three main failure modes are determined. Meanwhile, their performance functions are established as well. To solve the complex correlations among multiple failure modes, a novel mixed copula function that can capture the upper and lower tail dependencies simultaneously is proposed, which comprises the Gumbel copula and the Clayton copula. Further, a novel procedure that adopts the non-parametric kernel density estimation (NKDE) technique to estimate the probability density function (PDF) and the cumulative distribution function (CDF) for each performance function of the separation mechanism is proposed. The parameters of the mixed copula function are estimated using the method of maximum likelihood estimation. Subsequently, to further study the separation mechanism’s reliability during working, a time-variant parameter estimation method is introduced to build the time-variant mixed copula function. Finally, both the reliability and time-variant reliability of the separation mechanism are analyzed via the proposed integral methods. Comparisons with other analysis schemes show that the proposed integral method is not only effective but also efficient in analyzing the reliability of our target mechanism.
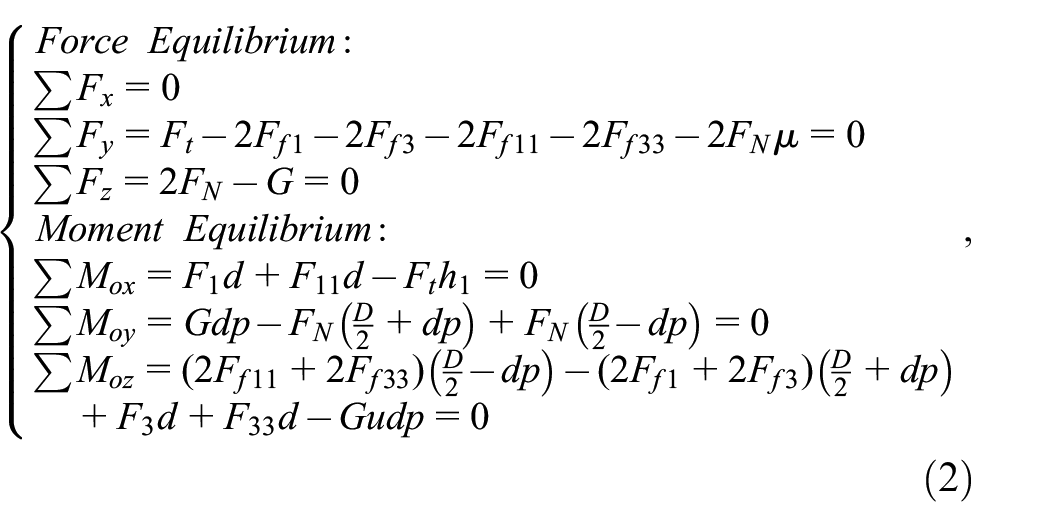
Keywords
Introduction
Conventionally, the rescue end-effector is installed at the end of rescue equipment to perform rescue tasks.1,2 The end-effector not only is a core device but also plays a deterministic role to the overall performance of rescue equipment. To modify the performance of traditional rescue equipment, we designed a novel multi-functional rescue end-effector with tonging, shearing, and grasping capabilities, as illustrated in Figure 1. 3 This new invented rescue end-effector comprises a separation, a grasping, and some additional supporting mechanisms, and is easy to be manipulated. Therefore, it may save the time required for replacing individual end-effector so as to improve rescue efficiency. Despite the above merits of our new invented rescue end-effector, further studies on its major switch function as well as the reliability of each mechanism is essential. It is known that the reliability of each mechanism significantly affects the overall reliability of the end-effector directly. Besides, among all parts of a rescue end-effector, the separation mechanism plays the most important role since it determines the expansion range of grasping and the switching functions between the tonging-shearing and grasping forms. Furthermore, it is noticeable that when the end-effector performs the tonging-shearing task, the separation mechanism is subjected to a very large force. This may result in crack of material and even the failure of whole rescue equipment. Therefore, this paper aims to analyze the reliability of the separation mechanism for our new invented rescue end-effector.
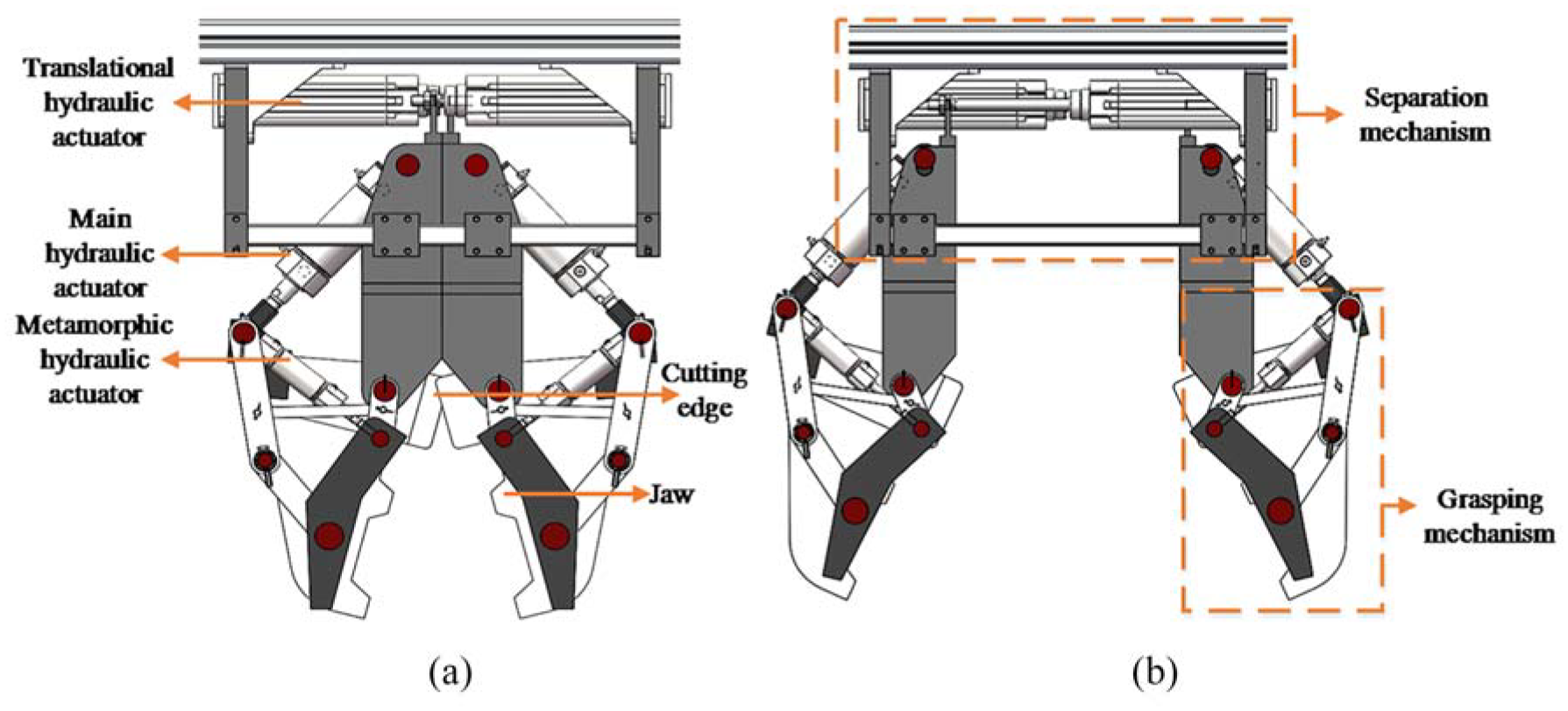
Multi-functional rescue end-effector. (a) Tonging and shearing form and (b) grasping form.
The motion mechanism is generally a mechanical system comprising multiple component mechanisms that accomplish various functions by transmitting either the motion or load.3–5 The reliability of a motion mechanism depends on two crucial factors which are the structure as well as the motion function reliability of individual component. The structure reliability of each component mainly refers to the reliability in term of the strength or stiffness of the component, and the component reliability is a prerequisite to ensure the motion function reliability of the mechanism.6,7 The reliability of the motion function is defined as the ability of the mechanism to complete specified functions accurately in a timely and coordinated manner under specified conditions of usage and within specified periods.8–10 The failure of the mechanism’s motion function is defined as the failure form of the mechanism caused by mismatching of the geometric or mechanical relationship between components, yet the component mechanism does not really fail. Therefore, the reliability of a mechanism usually involves multiple failure modes and complex failure mechanisms. Furthermore, in engineering practice, the output motion of a mechanism is usually time-variant because that its applying load is time-variant and stochastic, material properties are time-variant, manufacturing errors are dynamic, and motion is time-variant.11–14 Hence, it is necessary to analyze the time-variant reliability of the mechanism. In addition, the reliability and time-variant reliability model of a system with k failure modes can be written as follows, respectively.

where
A lot of past studies on multiple failure modes of motion mechanism were focusing on how to accurately solve the related linear correlation coefficients with appropriate methods, such as the widely used narrow boundary method.15–21 However, the linear correlation coefficient cannot reflect the complex nonlinear relationship that exists among different multiple failure modes. In addition, some scholars used the method of weakest link theory to improve the computational efficiency by simplifying the characteristic of correlation.22,23 The main feature of this theory is that the failure probability of the weakest failure mode is regarded as the failure probability of the system, which then leads to large errors in calculation. Generally speaking, the well-known Monte Carlo (MC) method is so far the most versatile and accurate method, and the results from MC method are often regarded as the base for comparison with other methods.24–26 However, in MC, large numbers of sample points must be used in order to estimate a convergent failure probability for small probability events in engineering. In a short comment, to overcome the appeared difficulties of the aforementioned proposed methods, it is beneficial to adopt other auxiliary methods such as ADAMS and ANSYS in the reliability analysis.27,28 To be sure, it will take more simulation time.
Compared to the time-invariant reliability analysis, the time-variant reliability analysis is much more complicated. Jiang et al. 29 proposed an outcrossing rate model to analyze time- variant reliability of the system, and the effectiveness of the method was proved. Hu and Mahadevan 30 proposed a method to characterize the system as a random field with two dimensions for time-varying reliability analysis. Zhou et al. 31 analyzed the time-variant reliability of system based on moment method and probability density evolution method. Yu et al.11,12 proposed a method which combined the extreme moment method and the improved maximum entropy method for time-varying reliability analysis. However, the above methods are based on approximate analytical solutions, which may have low accuracy in dealing with highly nonlinear problems.
On the other hand, the copula function (CF) method proposed by Sklar 32 provided an effective tool to describe the correlations among failure modes and additional random variables. The CF method is outstanding in analyzing the joint distribution construction problem with multidimensional random variables. The CF can be used to estimate the marginal probability distributions combined with a dependent structure among various marginal distributions. By this way, the joint probability distribution can then be constructed more simply and flexibly as a result. The CF methods were widely used in the field of reliability analysis for multiple failure modes.7,33,34 It is noticeable that different CFs may have different characteristics. Fang et al. 35 and Tang et al. 36 used different copula functions to analyze the reliability of their systems and compared the obtained results with others’ works. In addition, since it is difficult to accurately describe the complex correlation among multiple failure modes using a single join model, several researchers thus attempted to construct mixed copula functions to provide a better description.37–39 Wang et al. 38 applied the Clayton copula, Gumbel copula, and Frank copula to establish a reliability model for a rolling bearing. Jiang et al. 39 established a mixed copula model using the linear weighting method in the structural reliability analysis. In short, the above investigations indicate that the mixed copula approach is suitable for establishing a reliability model of the system with multiple failure modes.
In this paper, the failure causes and failure mechanisms for our new invented separation mechanism are analyzed, and its three main failure modes are identified as well. Particularly, both Clayton copula and Gumbel copula functions are adopted to construct a mixed copula function that can capture two tail correlations simultaneously for use in the reliability analysis of separation mechanism. It is noticeable that no matter the single or the mixed copula function mentioned above is merely a static copula function.
It is known that, for a motion mechanism, it is inadequate to use a static copula function to describe the correlation change among multiple failure modes during working. Therefore, we propose a time-variant parameter estimation method to construct a time-variant mixed copula function for proper use in the motion mechanism. The reliability of the separation mechanism can then be calculated based on this time-variant mixed copula model. The implementation process of this study is as follows. First, we introduce the working principle and analyze the applying forces of the separation mechanism. Second, we analyze the failure causes and failure mechanisms of the separation mechanism. Third, a reliability analysis method based on the time-variant mixed copula function is proposed. Fourth, we analyze the reliability and the time-variant reliability of the separation mechanism. Finally, the time-variant reliability of the separation mechanism is modeled using a polynomial equation with least square method.
The novelty of this study includes three points. First, we design a novel multi-functional rescue end-effector comprising a separation mechanism and a grasping mechanism. Second, we propose a novel mixed copula function that can capture the upper and lower tail dependencies simultaneously, which comprises the Gumbel copula and the Clayton copula. Third, a non-parametric kernel density estimation (NKDE) technique is then used to estimate the probability density function (PDF) and the cumulative distribution function (CDF) for each performance function of the proposed separation mechanism.
Analysis of separation mechanism
Working principle
The separation mechanism mainly comprises a frame, two translational hydraulic actuators, two guide rails, and four sliding pairs, as illustrated in Figure 2. Because the separation mechanism is symmetrical, only one side of the schematic diagram is shown for clear observation.

Separation mechanism.
When the end-effector carries out the tonging-shearing work, the translational hydraulic actuator retracts the piston to the right limited position and then locks, as shown in Figure 1(a). In contrast, when the end-effector carries out the grasping work, the piston of translational hydraulic actuator protrudes as far as possible to the right limited position and then is locked in place, as shown in Figure 1(b). Obviously, the separation mechanism is a key component in the transformation of work types for a rescue end-effector.
Force analysis of separation mechanism during transformation
Extension of a separation mechanism may enlarge the grasping space of the end-effector. The main driving force of the separation mechanism is supplied by a translational hydraulic actuator. We now analyze all possible applying forces on the separation mechanism. As shown in Figure 3, the driving force of the translational hydraulic actuator is
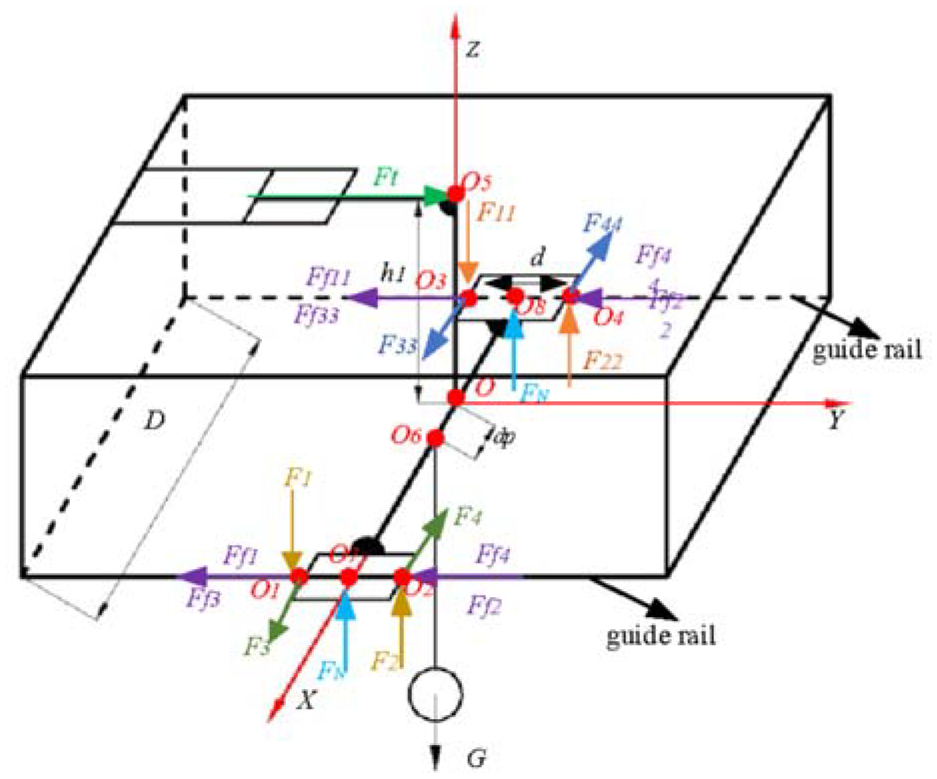
Force analysis of separation mechanism during transformation.
The distance between the application point O5 of the translational hydraulic actuator and the point O in the Z-axis direction is
where u is the friction coefficient between the sliding pair and the guide rail,
To improve the rigidity of the separation mechanism, we design two parallel guide rails as additional supports. However, these rails give redundant constraints and result in a statically indeterminate state of the whole structure. Therefore, according to the deformation compatibility condition, we may obtain:

Using equations (2) and (3),

When the mechanical structure parameters
Force analysis of end-effector during tonging-shearing
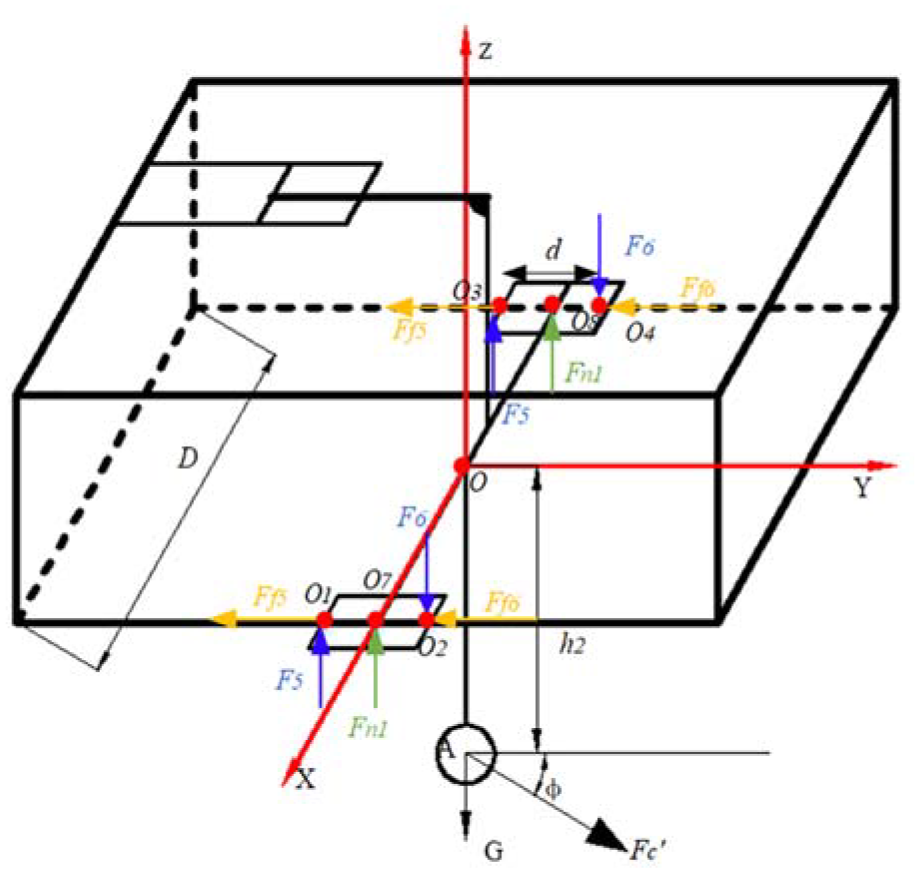
For the separation mechanism, the force required to shear a steel bar is much greater than that required for grasping it. Therefore, the shearing operation case should be especially noted and carefully analyzed. Now, supposed that the separation mechanism remains at a closed state when the end-effector is performing the tonging-shearing operation. The force analysis of the end-effector at this state is shown in Figure 4. We can then deduce to obtain that:


Force analysis of the end-effector during tonging-shearing.
where
The shearing force varies with

Force analysis of the cutting edge.
Based on the requirement of static equilibrium conditions, the following equations can be established:

where
By solving equation (6), we may obtain:



Force analysis of separation mechanism under self-locking
For the concerns of easy and safe manipulations, it is necessary that the separation mechanism must be kept at a closed state when the end-effector is performing the tonging-shearing operation. Specifically, our designed mechanical structure of separation mechanism with well-defined shapes and dimensions may exhibit self-lock state automatically without additional supply of any driving force from the translational hydraulic actuator. This self-lock state as well as the force analysis of the whole separation mechanism under the tong-shearing operation are shown in Figure 6.
Force analysis of the separation mechanism during tonging-shearing.
Similarly, the geometric design of cutting edge with distance

where
By solving equation (10), we can obtain:

Therefore, the following condition must be met to enable the separation mechanism to achieve a self-locking state:

Furthermore, this condition can be rewritten as:

Therefore, when the mechanical structure parameters
Failure cause and failure mechanism analysis of separation mechanism
As previously stated, when we need to transform the end-effector between the tonging-shearing and grasping forms, the separation mechanisms must perform corresponding actions in advance. By synthesizing the analysis results obtained in Section 2, we propose three possible failure modes for the separation mechanism: self-locking failure, component failure, and motion seizure failure, as described in Table 1.
Failure modes for separation mechanism.

Influencing factors of self-locking failure
According to the discussions in Section 2.4, when the end-effector is performing the tonging-shearing operation, the separation mechanism must be at the closed state, the static friction force is certainly greater than the reaction force. Therefore, the self-locking failure criterion can be defined as:

Furthermore, this criterion can be rewritten as:

By combining the working principle of the end-effector with the force analysis of the separating mechanism, we are able to conclude that the main factors influencing the self-locking failure are the friction (parameter: friction coefficient
Influencing factors of component failure
According to Section 2.3, as the guide rail is subjected to large forces of

where

where
Influencing factors of motion seizure failure
When the end-effector transform between the tonging-shearing and grasping forms, the translational hydraulic actuator must provide enough driving forces to assure the opening or closing motions of the separating mechanism. Therefore, the motion seizure failure criterion for the separation mechanism can be expressed as the difference between the maximum driving force provided by the translational hydraulic actuator and the maximum theoretical driving force according to the law of motion, that is:

where
Reliability analysis based on mixed copula
Mixed copula model
Different copula functions have different tail correlations. Because the correlations in different failure modes for the mechanism system are nonlinear and complex, a single copula function cannot fully describe them. Additionally, the Clayton copula is dependent on the lower tail of variables, but the Gumbel copula is dependent on the upper tail of variables. The expressions for these two copulas are respectively expressed as follows:

where

where
Accordingly, the reliability of a mechanism system that has k failure modes can be expressed using the above mixed copula model as:

where
Parameter estimation in mixed copula
Past studies often adopted empirical theories to calculate the failure probability in copula functions. However, in engineering applications, this approximation may have great deviation due to manufacturing and measurement errors for the dimension parameters of mechanism. Instead of the traditional empirical-theory approximation, we adopt the non-parametric kernel density estimation (NKDE) algorithm to estimate the failure density function (PDF) and the cumulative distribution function (CDF) of each performance function accurately, which is one of the most well-known data fitting algorithms. 40 The NDKE algorithm is entirely based on historical data and no necessary to preset any distribution of variables.
Assuming that the concerned separation mechanism has k failure modes, the PDF and the CDF of the i-th failure mode are expressed as
where n is the sample size,
It can be found from equation (22) that when the number of samples remains constant, the accuracy of

In addition, the bandwidth is optimized using the method proposed in the literature, 41 and the mathematical model can then be expressed as follows:

Therefore, the kernel density distribution function

where
Next, we are going to use the time-variant correlation parameters to describe the changes of correlations in different failure modes for the separation mechanism. A time-variant parameter estimation method is proposed to establish the time-variant mixed copula model to reflect the time-variant reliability of the separation mechanism, as illustrated in Figure 7. The detailed steps of this method are given as follows:
Step 1: Determining the total motion cycle N, the initial sample size n, the initial sampling cycle t, and the sampling interval cycle k.
Step 2: Sampling the data of random variables. Then, calculate the sequence values of performance functions.
Step 3: Using NKDE technique to estimate PDFs and CDFs of the performance functions. Calculate the failure probability
Step 4: Establishing a mixed copula model via equation (20).
Step 5: Performing the maximum likelihood estimation. Assuming that Zit is the performance function i of the t-th cycle and Fit(Zit) and fit(Zit) are the marginal distribution function and the marginal density function, respectively. Then, the joint distribution function for the variables is


Time-variant parameter estimation procedure for the mixed copula.
The likelihood function of
where
The maximums of the likelihood function can then be obtained as:

Step 6: Using the minimum Euclidean distance method (d2)
42
to test the fitting effect. If
Step 7: Establishing a mixed copula model based on the obtained parameters
Step 8: Stopping criteria. If
Testing of the proposed method
A test example with two failure modes and four factors is performed to test the performance of the proposed algorithm. Here, x2 is a time-variant factor. The type of random variable and its distribution parameters are listed in Table 2. The performance functions of the failure modes are given as follows:

Type of random variable and its distribution parameters.

Table 3 and Figure 8 show the comparison results among the methods of Clayton copula, Gumbel copula and mixed copula for the test example, in which they all use the same amount of samples. The results obtained by the MC method are used as the comparison base to calculate the errors. The time interval t of x2 is set within the range of 1–8.
Comparison of results obtained from different copula functions.


Comparison of the results obtained from the different methods.
It is found from Figure 8 that both the correlations between the two failure modes and the failure probability of system change with x2. Further, the weight coefficient also changes with x2, as indicated in Table 3. The result obtained via the mixed copula is much closer to that obtained by MC than those obtained by other methods. Figure 9 shows the CDFs of the performance function with the minimum and the maximum sample sizes that happen at the time of t = 2 and t = 5, respectively. It is clear that the theoretical CDF almost overlaps with the NKTD-based CDF. This indicates that the NKDE technique can be used to estimate the distribution of the performance function effectively, and the failure probability of each failure mode can be calculated using the estimated CDF.
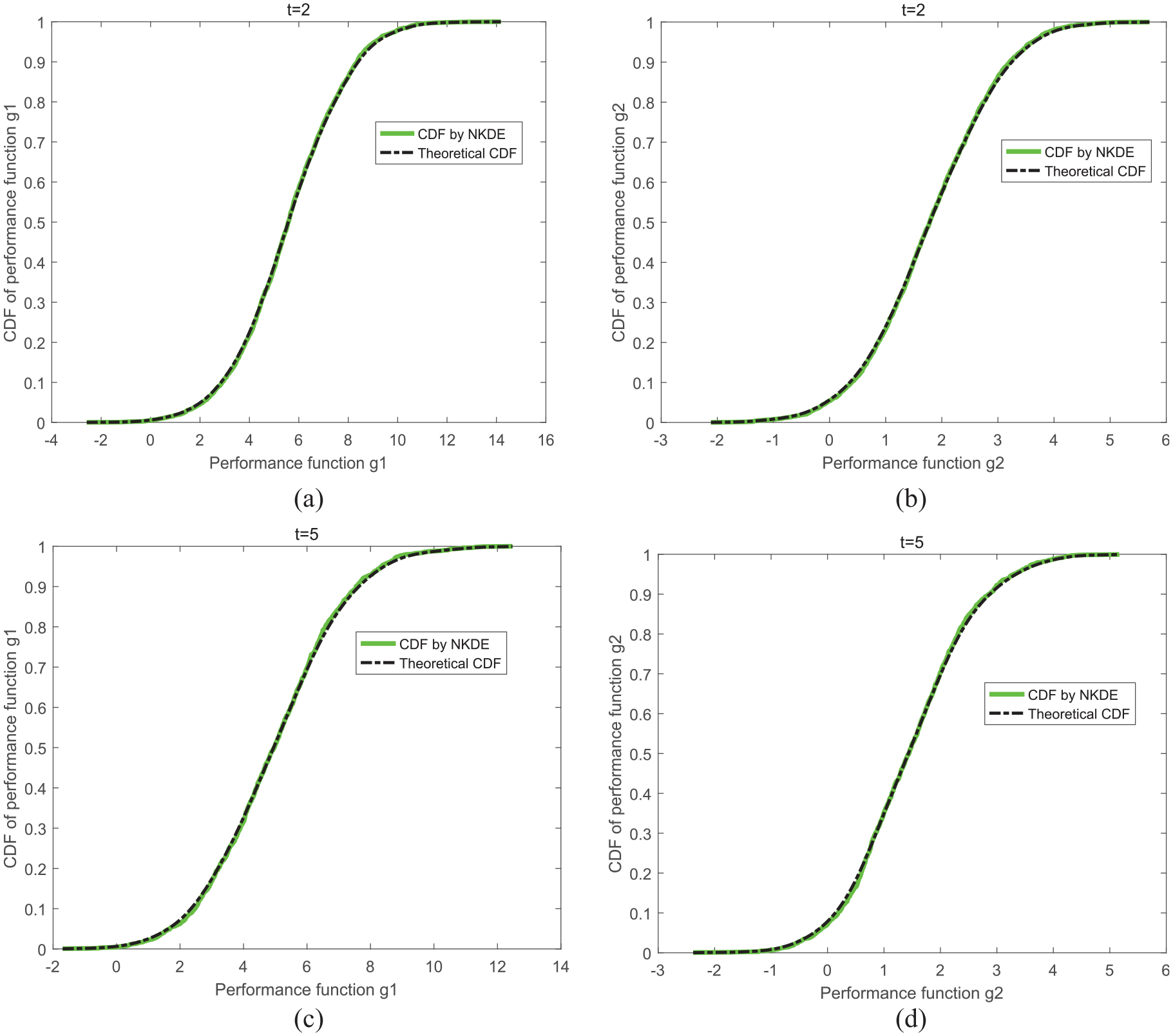
CDFs of the performance function. (a) CDF of g1 by NKDE and theoretical CDF for t = 2, (b) CDF of g2 by NKDE and theoretical CDF for t = 2, (c) CDF of g1 by NKDE and theoretical CDF for t = 5, and (d) DF of g2 by NKDE and theoretical CDF for t = 5.
For further verification, the parameter of Akaike information criterion (AIC) and the minimum Euclidean distance method (d2) 42 are used to test the fitting effects of different copula models. Smaller values of AIC and d2 indicate better fitting effects for the algorithm. Under the constraint of the same sample size, Table 3 shows that the mixed copula has smaller values for both AIC and d2 than those of Clayton copula and Gumbel copula. This implies that the mixed copula provides a better fitting effect. More importantly, the results obtained by the mixed copula with a small sample size show a difference of less than 5% when compared with the results obtained via the MC method with a large sample size. This illustrates that the proposed mixed copula method is not only enough accurate but also very effective.
Results and discussion
Reliability analysis of separation mechanism
The rescue end-effector was designed by our research group of Wang et al., 3 as shown in Figure 10. The weights of the grasping and tonging-shearing mechanism are 63.3 and 30 kg, respectively. The value of G can therefore be calculated as:


Multi-functional end-effector.
According to the design requirements of rescue equipment, the end-effector should be able to cut an HRB400 steel bar with a diameter of 50 mm. The compressive strength of the steel bar (

where
The rescue end-effector was made of 16Mn steel
3
with a yielding stress of
Distribution type of random variables.

Based on the parameters listed in Table 4, the failure probability for each failure mode (
Failure probabilities of the separation mechanism.


CDFs of the performance functions based on NKDE. (a) CDF of g1 based on NKDE, (b) CDF of g2 based on NKDE, (c) CDF of g2 based on NKDE, and (d) CDF of g3 based on NKDE.
The above analysis indicates that the main failure modes for the improved separation mechanism are self-lock failure and motion seizure failure. The PDF and CDF of the mixed copula model for the separation mechanism with new material are shown in Figure 12(a) and (b). These figures show that the Gumbel copula model has a larger weighting coefficient than other models, and the two failure modes both have strong upper as well as lower tail dependence. In addition,
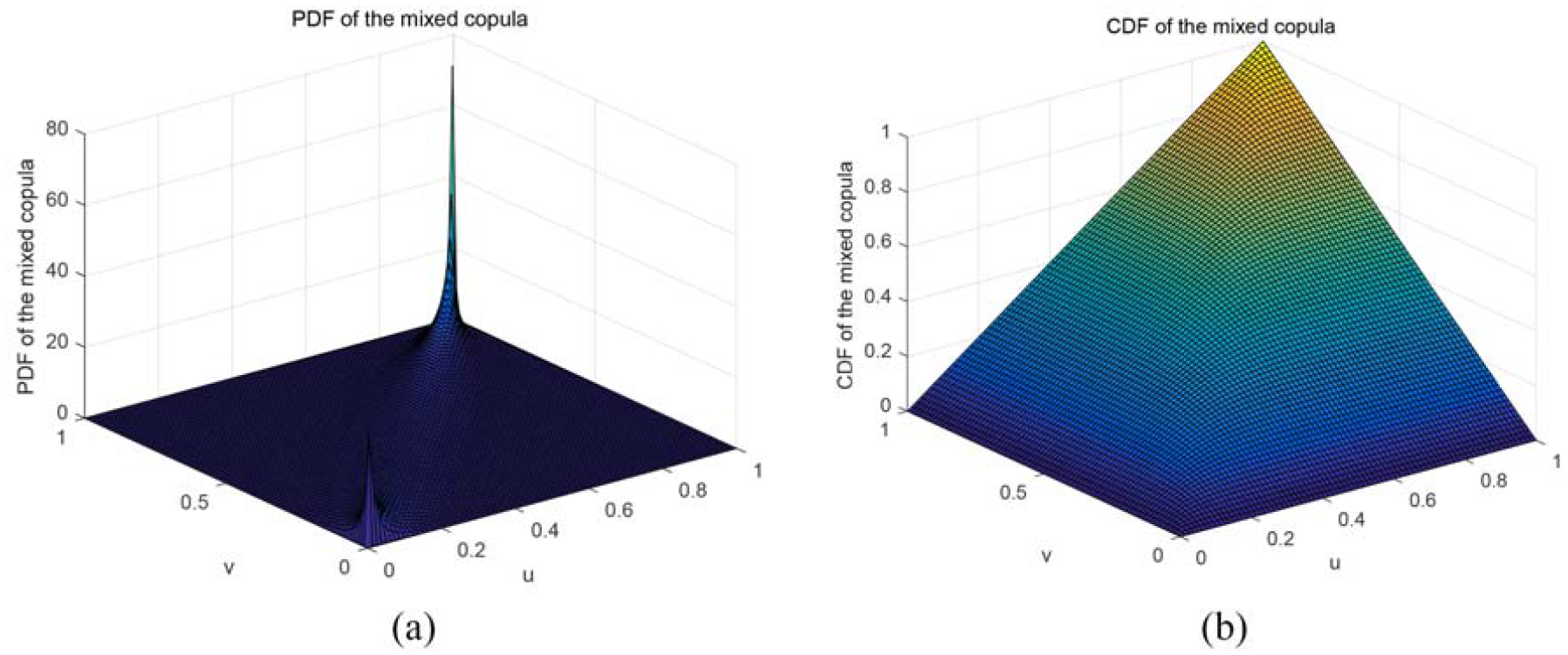
Results obtained for a sample size of 1400 (
Time-variant reliability of separation mechanism
As the number of motion cycles of the separation mechanism increases, accumulation of component damage will lead to reduction of the mechanism’s reliability. Analysis of the working principle of the separation mechanism indicates that the damage mainly manifests as wear between the sliding pair and the guide rail, which can then be characterized by the friction coefficient

The friction coefficient in any opening and closing cycle can thus be obtained using curve-fitting with the least-square method. The experimental results show that the mean value of the friction coefficient is 0.2 + 5 × 10 − 5n and the standard deviation is 0.02 + 10 − 6n, where n is the current motion cycle. The MC method and the proposed mixed copula method were both used to calculate the reliability of the separation mechanism at each interval of k cycles. In addition, the total motion cycle N = 8000, the initial sampling cycle t = 0, the sampling interval cycle k = 10, and the distributions of the other parameters are the same as those listed in Table 4. The subsequent fitting of the results to obtain the evolution of the reliability with respect to the motion cycle is shown in Figure 13.
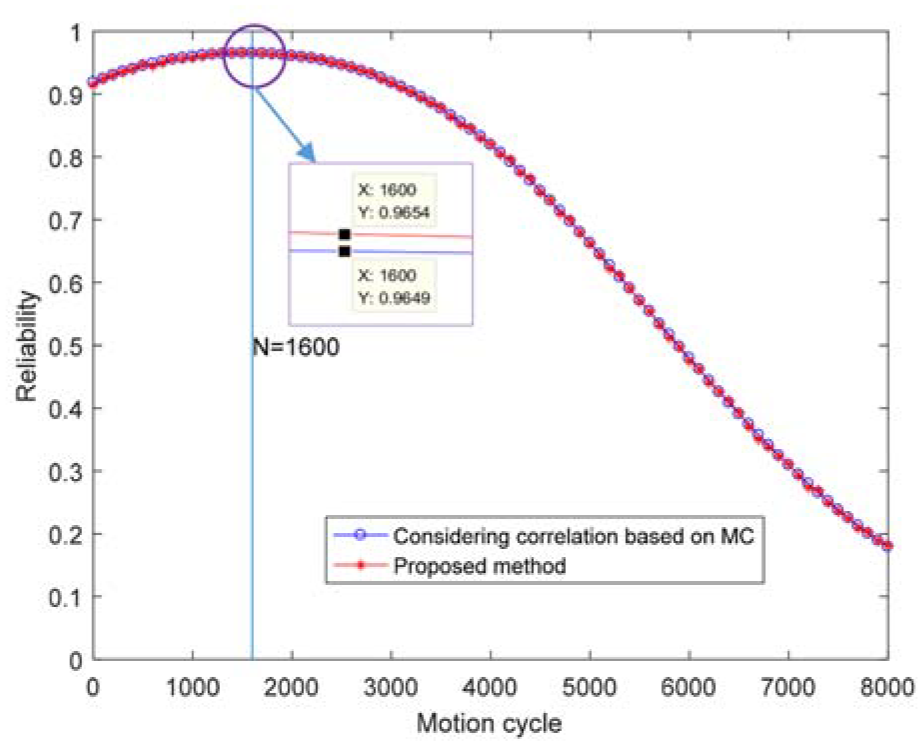
Time-variant reliability of separation mechanism.
The above analysis indicates that the proposed mixed copula method provides a satisfactory prediction of the reliability of the mechanism for time-variant motion service. Further, it is found that, to reach the required accuracy, it takes about 106 samples in MC method and a minimum of 800 samples, a maximum of 1800 samples, and an average of 1370 samples in our proposed mixed copula method. And, the reliability of the separation mechanism initially increases and then decreases with the motion cycle, and the highest reliability of 0.9654 occurs when the motion cycle number is 1600. Apparently, our proposed copula method is more efficient and effective than other methods in analyzing the time-variant reliability of separation mechanism. In addition, we may obtain the relationship between the reliability of these two failure modes and the motion cycle is obtained through calculations, as shown in Figure 14. When the motion cycle number is less than 1600, the self-locking failure mode dominates the motion, which causes the reliability increases rapidly with increasing service time. On the other hand, when the motion cycle number is greater than 1600, the motion seizure failure mode dominates the motion, which causes the reliability decreases slowly with increasing service time.

Time-variant reliability curves for motion seizure and self-locking failure.
In addition, the results also show that when the motion cycle number attains 4100, the reliability of the self-locking failure mode is 0.9921 and the reliability of the motion seizure failure mode is 0.8105. When the motion cycle number attains between 1600 and 4100, the reliability of the self-locking failure mode increases to 0.9921, which is very close to 1, while the reliability of the motion seizure failure mode decreases to 0.8105. Combination of these results with data shown in Figure 14 shows that the reliability of the separation mechanism decreases slowly during this period (motion cycle :1600–4100), but when the motion cycle number exceeds 4100, the reliability of the separation mechanism decreases rapidly.
In a whole sense, as the motion cycle exceeds 1600, a drastically increase of resistance as well as the failure probability of motion seizure occurs. At this time, the failure of the separation mechanism is dominated by the motion seizure. Therefore, during this period of service for the rescue end-effector, the guide rail surface should be kept clean, and all related lubrication works should be carefully done. If the guide rail is severely worn or deformed, it should then be replaced as quickly as possible to improve the reliability of the rescue end-effector.
Conclusions
In this paper, initially we analyze the working principle of a rescue end-effector and performed a force analysis of its separation mechanism. Then, we analyze the failure causes and failure mechanisms of the separation mechanism and identified three main failure modes. Specifically, we propose an effective reliability analysis method with multiple failure modes which adopts a novel mixed copula function and develops different failure correlations. In this novel method, the PDF and CDF of each performance function are estimated by NKDE. Furthermore, a time-variant parameter estimation method is proposed so as to establish a time-variant mixed copula function, which may successfully be applied to predict the time-variant reliability of the separation mechanism of multi-functional rescue end-effectors. Verification results demonstrate that our proposed method can not only be used to analyze the reliability for multiple failure modes, but also may acquire satisfying results using few samples, which are very close to the results obtained by the MC method using a large amount of samples.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Special Project of Central Government Guiding Local Science and Technology Development (No. 2021L3029), the Natural Science Foundation of Fujian Province (No. 2022J011181), the Leading Technology Project of Sanming City (No. 2021-G-7 and No. 2022-G-13) and the National Natural Foundation Cultivation Project of Sanming University (No. PYT2006).