
Abstract
To evaluate the state of rolling bearing more accurately, a new feature called composite multiscale weight slope entropy was proposed for the complexity measurement of vibration signals. On the basis of analyzing the fault signal structure, the new feature could consider the influence of the nonlinearity, the multiscale characteristics, the fluctuation of the amplitude, and the amplitude itself on the fault signals. In the following, different fault types and the corresponding damage degree of rolling bearings were identified with the hierarchical prototype-based approach. Compared with the results of different modified slope entropy, it is shown that composite multiscale weight slope entropy could significantly improve the identification accuracy. In the two designed testing schemes, ten and sixty state types of rolling bearings are respectively calculated, and the identification accuracy could reach up to 100% and 96.5% respectively, which illustrate the effectiveness and the validity of the proposed approach.
Keywords
Introduction
Rolling bearings are critical components of complex devices such as motors. 1 Timely diagnosis of their operation status and replacement could ensure well dynamic characteristics and motion accuracy of mechanical equipment, reduce the related failure of other components of equipment, so as to improve economic benefits and ensure the safety of operators. The operating state of the rolling bearing includes two aspects: fault type judgment and damage degree identification. The identification process is mainly divided into three parts: feature extraction, feature reduction, and fault classification.2,3
In order to extract abundant feature information from vibration signals and reduce the noise interference in the process of feature extraction, many scholars have studied the features representing the operating state of rolling bearings, including time-domain features, frequency-domain features, and nonlinear features such as L-Z coefficient and entropy values.4,5 Entropy is a metric of the degree of the data disorder and it has been widely investigated and applied for its good nonlinear expression of signals,6,7 such as approximate entropy, 8 sample entropy, 9 fuzzy entropy, 10 hierarchical entropy, 11 dispersion entropy, 12 permutation entropy,13,14 bubble entropy, 15 and gray entropy, 16 etc. The above types of entropy have made great achievements in improving the accuracy of rolling bearing fault diagnosis, but they still have further improvements, such as coarse-grained process of the signals to obtain entropy in multiple scales. 17 Fadlallah et al. 18 proposed weighted permutation entropy on the basis of permutation entropy, considering the influence of amplitude fluctuation. Based on the improvement of entropy, Zhang et al. 19 utilized the multiscale bubble entropy to identify the fault types and the damage degree of rolling bearings. Gan et al. 20 investigated the influence of multi-scale, fluctuation of each scale and amplitude fluctuation of data, and then proposed composite multiscale weighted permutation entropy for bearing diagnosis. Li et al. 21 explored the application of refined composite multivariate multiscale dispersion entropy in rolling bearing fault diagnosis. Zhang et al. 22 achieved rolling bearing fault diagnosis with the refined composite generalized multiscale bubble entropy. Xi et al. 23 presents refined composite multivariate multiscale fluctuation dispersion entropy to extract the recognition information of multi-channel signals with different scale factors. Sheng et al. 24 constructed local mean decomposition Shannon entropy and Ma et al. 25 employed wavelet packet-energy entropy respectively for bearing fault diagnosis with high accuracy.
In particular, data symbolization 26 can generate low-resolution data from high-resolution data, so as to capture large-scale features and reduce the impact of dynamic noise and measurement noise on statistical algorithms. The symbolization of rolling bearing vibration data sequences could take the form of dichotomy-based symbolization, probability distribution-based symbolization and angular interval symbolization. 27 At present, there are some problems, such as the lack of fine-grained symbolic entropy division, parameter selection based mainly on experience, failure to consider multiscale situations, and lack of adaptive capability for multiple fault types in rolling bearings, all of which limit the development of symbolic entropy analysis of complex systems. Slope entropy28,29 is a measure developed from symbol entropy. Considering the amplitude, it can reduce the noise interference. Therefore, this paper proposes an improved entropy-composite multiscale weighted slope entropy to represent the operating state of rolling bearings, and combines the hierarchical prototype-based approach 30 to realize the operating state identification of rolling bearings.
The rest of this article is organized as follows: the CMWSlE is derived in detail in Section “Composite multiscale weight slope entropy.” Section “Hierarchical prototype-based approach” briefly introduces HPA and a flowchart is presented in Section “Flowchart of rolling bearing state assessment.” Verification of the proposed method is performed with experiment data sets in Section “Experimental validation,” and the conclusions are drawn in section “Conclusion.”
Composite multiscale weight slope entropy
Slope entropy
Standardization of vibration sequences

in which
The subsequence
(1) When
(2) When
(3) When
When
When

Slope entropy with three division levels.
When the embedding dimension is set as m = 4, the different types of patterns symbolized by the difference sequence are shown in Figure 2 according to the procedure of data symbolization above with specified γ and δ. Let n be the number of all pattern types, πl be the lth pattern and

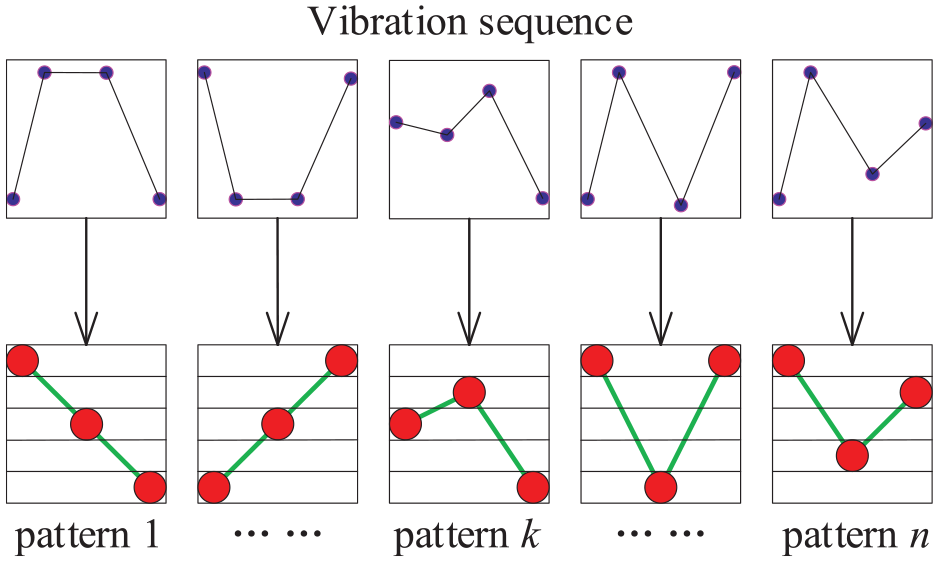
Illustration of the different patterns when m = 4.
in which

Weighted slope entropy
Considering the fluctuation of the vibration sequence under the same structure, the literature Manis et al. 15 proposes an improved algorithm as shown in Figure 3. In this algorithm the same structure data is weighted according to its fluctuation, that is, equation (3) is replaced by:


Volatility of data with the same structure.
in which the weighted value

Composite multiscale weighted slope entropy
For a given smax as the maximum of scale factor, the coarse-grained sequence of
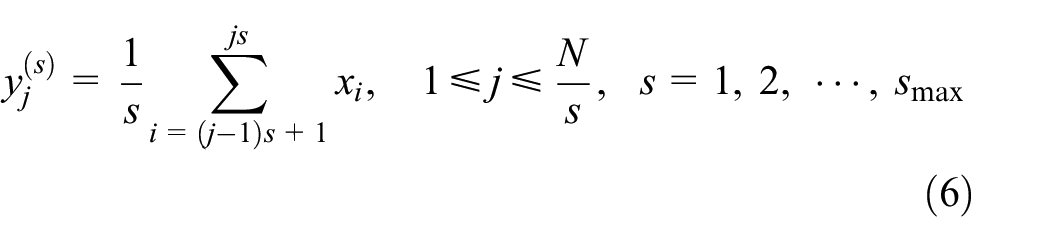
in which s is a positive integer termed scale factor, and a procedure of the coarse-grained process is illustrated in Figure 4. With the scale s, the multiscale weighted slope entropy values are calculated as:


The coarse-grained process of the vibration data sequence.
In further, the composite coarse-grained sequence of

MWSlE values of s coarse-grained sequences

For the CMWSlE, it degenerates to MSlE if no weighting and no averaging on each scale are performed; if just weighting on each scale is taken, it degenerates to MWSlE; if just averaging is performed, it degenerates to CMSlE. Alternatively, signal hierarchical decomposition is performed by the method proposed in the literature Richman and Moorman 9 and combined with weighted slope entropy to obtain HWSlE.
Hierarchical prototype-based approach
Let
General framework
The general structure of the hierarchical prototype-based approach is shown in Figure 5. Let
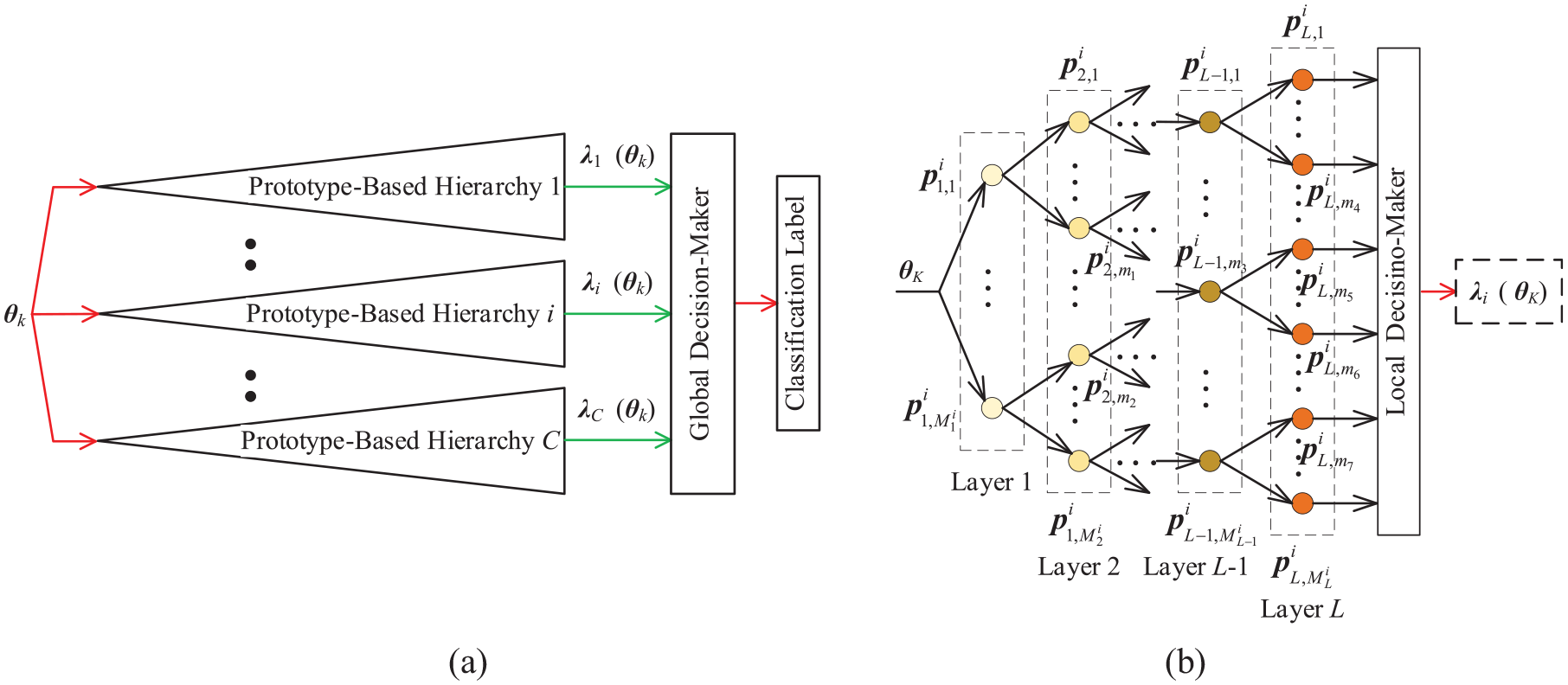
The general architecture of the hierarchical prototype-based classifier: (a) System structure and (b) Structure of the ith prototype-based hierarchy.
Learning process
For each sample

in which
During the learning process, the first observation sample

in which
For the top-level prototypes, as shown in Figure 6, they are defined as


Illustration of the three-layer prototype-based hierarchy approach.
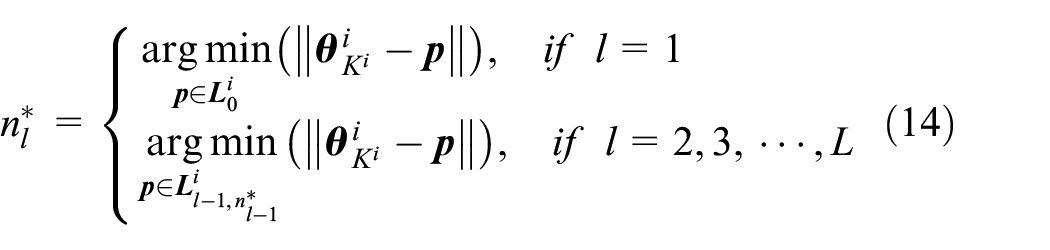
For the l-th level of

By means of the above equation, the fault chain of the i-th class is established starting with
When a new sample
The above equation reduces the scope of the search from the entire data space to a small number of neighboring prototypes, avoiding the time wastage caused by searching for a large number of prototypes far away
Decision process
As shown in Figure 7, for the testing sample


Illustration of rolling bearing state classification.
where
Flowchart of rolling bearing state assessment
The flowchart of rolling bearing state assessment based on the composite multiscale weighted slope entropy and the hierarchical prototype-based approach is as follows:
Step 1. Collect signals of different fault types with corresponding damage degrees of rolling bearings. Set the data length n = 2048 for the prepare of CMWSlE features extraction, as well as the entropy features used for comparison: MSlE, MWSlE, CMSlE, and HWSlE.
Step 2. Normalize the data of each segment, and then extract the CMWSlE features and the entropy features for comparison. The parameters are set as: embedding dimension m = 4, scale factor s = 20, time delay τ = 1, predefined thresholds γ = 1, δ = 0.001.
Step 3. Design two test schemes to verify the effectiveness of this method in combination with the needs of the practical project. The two schemes respectively test the fault types of rolling bearings under different working conditions and the same damage degree, and the fault types with corresponding damage degrees of rolling bearings under the same working conditions. There are 50 samples in each rolling bearing state, of which 10 samples are used to train the HPA, and the other 40 samples are used to verify the method proposed in this paper. The accuracy of the proposed method is:

in which nR and nT respectively are the total number of correctly classified samples and the total number of test samples.
Experimental validation
The test schemes including test group A and test group B are designed to verify the proposed approach as shown in Table 1. The two test groups have certain practical values in engineering. The experimental device of CWRU for artificial fault bearings is composed of drive motor, loading motor, torque sensor, etc. The test bearing is the type of deep groove ball bearing with model SKF6205, and it is installed at the drive end, as shown in Figure 8. Single point damage on bearings are made by electric spark and there are three types of failure types: REF, IRF and ORF. The diameter of single point damage of each fault type is shown in Table 1, which can indicate the degree of damage. From the fault signals of each component of the rolling bearing in Figure 9 and the vibration signals of the rolling elements under different loads when the damage degree is 0.007 in in Figure 10, it could be seen that the fault signals of different components are easy to distinguish, while the vibration signals of the slightly worn rolling balls under different working conditions are difficulty to distinguish. The reason is that the rolling balls are always in the complex motion state during the working process. In addition, the vibration signals of ORF at 6:00 are selected.
Design of test schemes regarding bearings with artificial faults.


Bearing fault test equipment of CWRU. 31

Vibration signals at the damage level 0.007 in for different fault types of bearings on the condition of load 2 HP and rotating speed 1750 r/min in testing group A.

Vibration signals of the rolling elements at the damage level 0.007 in for different loads in testing group B.
According to the parameter settings in Section 4, the CMWSlE features are extracted from test group A and test group B, as well as the entropy features used for comparison: MSLE, MWSlE, HWSlE, and CMSlE, as shown in Figures 11 and 12 respectively. In HWSlE calculation, three layers are considered for the hierarchical structure and other settings are the same. It could be seen from Figures 11 and 12 that compared with the statistical values under 50 samples, CMWSlE has smaller Std. than MSLE, MWSlE, HWSlE, and CMSlE, indicating the stability of CMWSlE in rolling bearing fault diagnosis. The trends of CMWSlE and CMSLE at each scale are basically the same, and the standard deviation of CMWSlE is relatively large, but it contains more abundant information at each scale.

Comparison of entropy values at the damage level 0.007 in for different fault types of bearings on the condition of load 2 HP and rotating speed 1750 r/min in testing group A.

Comparison of entropy values at the damage level 0.007 in of rolling bearings at different working conditions in testing group B.
Support vector machine mainly solves the problem of two classification. For the classification of various fault states, it is necessary to construct appropriate classification algorithms, such as “one-to-one” algorithm and “one to many” algorithm. The classification strategies developed on the proposed algorithms include binary tree, DAG and so on. Among them, DAG-SVM structure 32 is faster and more accurate. Therefore, this paper compares it with HPA.
In test group A and test group B, each group carries out 10 times of random sample extraction according to Table 1 for the training of DAG-SVM and HPA, and the remaining samples are used for testing. In each calculation, the classification accuracy is counted, and the statistic results are shown in Figures 13 and 14. It could be seen that the average classification accuracy of the HPA is significantly better than DAG-SVM, and the standard deviation is less than DAG-SVM, which further illustrates the stability of the HPA in the multiple fault classification of rolling bearings. In Figure 13, CMSLE and CMWSLE respectively combined with HPA have 100% classification accuracy in 10 tests, so its standard deviation is 0. In Figure 14, compared with CMSLE, CMWSLE has higher classification accuracy and better stability for more rolling bearing fault states under more complex working conditions. As shown in Table 2, the results of recent research on artificial fault bearing data of CWRU are collected and compared with this paper. Compared with Zheng et al. and Gao et al.,33,34 the proposed method can distinguish more rolling bearing fault states when the classification accuracy is the same as that of test group A; Compared with Tang et al., 35 there is no need for preprocessing and feature selection of rolling bearing fault signals. Although the classification accuracy of test group B is slightly lower than that of literature,36,37 the number of classification of fault states is significantly increased.

Comparison of classification accuracy of testing group A.

Comparison of classification accuracy of testing group B.
Comparisons of classification accuracy with approaches published in the literatures.

STFT: short time Fourier transform; NMF: nonnegative matrix factorization; DTCWPT: dual tree complex wavelet packet transform; IMPE: improved multiscale permutation entropy; LLTST: linear local tangent space transformation; ELM: extreme learn machine; ALIF: adaptive local iterative filtering; MSE: multiscale sample entropy; MFE: multiscale fuzzy entropy; MPE: multiscale permutation entropy; KSRC: Kernel sparse representation classification; VPMBCD: variable predictive model-based class discrimination.
Conclusions
In this paper, the composite multiscale weighted slope entropy combined with the hierarchical prototype-based approach is proposed to identify various fault states of rolling bearings. The main conclusions are as follows:
The CMWSlE features could consider the structure, volatility, multiscale characteristics, and amplitude effects of rolling bearing vibration data. Compared with other entropy values, the composite multiscale weighted slope entropy has less volatility under multiple sample statistics and contains more fault state information.
In the two test groups of different fault types with corresponding damage degree under the same working conditions, and different fault types with the same damage degree under different working conditions, the CMWSlE combined with the HPA could significantly improve the classification accuracy, which are 100% and 96.5% respectively. This shows the validity of the method proposed in this paper and the effectiveness of distinguishing more fault states of rolling bearings under complex working conditions.
In the two test groups, the method proposed in this paper reduces the preprocessing and feature selection of fault vibration signals on the basis of ensuring the accuracy of rolling bearing fault state identification, which makes the method more simple to use, and reduces the calculation time, laying a foundation for its application in complex mechanical equipment.
Footnotes
Appendix
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (NO. 52175074) and Key Basic Research Projects of the Foundation Strengthening Plan (NO. 2020-JCJQ-ZD-209-00)