
Abstract
The speed control performance of permanent magnet synchronous motor (PMSM) drive system is degraded due to non-matching disturbances such as parameter perturbation and load torque mutation. This paper presents a nonlinear generalized predictive control method based on equivalent-input-disturbance (GPC-based-EID) to realize the fast response and strong robustness of the speed controller of the PMSM drive system. Firstly, the continuous time nonlinear system of a motor mechanical equation is established. A speed controller based on the generalized predictive theory rather than the PI controller of a traditional vector control is designed. Then, the drive system with disturbance is transformed into an EID system. An improved nonsingular fast terminal sliding-mode observer (NFTSMO) is introduced to accurately estimate the EID of total system non-matching disturbances. And the active compensation of non-matching disturbances is realized through feedforward method. This greatly enhances the robustness and the speed tracking performance of the drive system. Comparisons with PI control, traditional GPC and GPC-based-ESO methods show the effectiveness of the method.
Keywords
Introduction
Permanent magnet synchronous motor (PMSM) has gradually replaced DC motor and induction motor due to its advantages of high efficiency, high power density, high dynamic performance, and high reliability. And it is widely used in various industrial production practices, such as new energy vehicles, industrial robots, aviation, rail transit, high-precision machine tools, and UAVs.1–3 The performances of a fast speed dynamic response and a high-precision torque response of a PMSM drive system are very important in high-precision and high-performance engineering applications. 4 At present, the PMSM drive system usually uses the field orientation control (FOC) strategy as a classical control scheme, which contains the double closed-loop control structure of a speed outer loop and a current inner loop. The PI controller is widely used in the structure because of its simplicity and good steady-state performance. 5
However, the PMSM drive system is a typical highly nonlinear system with multivariable, strongly coupling, and uncertain model. Moreover, the system operating conditions are complex and changeable, which are easily affected by uncertain factors such as internal disturbances (parameter perturbation and non-modeling dynamics) and external disturbances (sudden changes in load torque). This results in the speed loop control is nonlinear and time-varying. 6 Especially, the disturbances, such as motor parameters perturbation and sudden torque change, inevitably lead to fluctuation of motor speed. This leads to the degradation of the speed tracking performance of a PI controller. Although the speed fluctuation is generally ignored in low-precision industrial applications, accurate speed control is an inevitable problem in high-precision industrial applications such as computer numerical control machine tools, industrial robots, and electric vehicles. Many scholars did a lot of researches on speed control of PMSM in recent years, and presented a large number of algorithms to improve the anti-disturbance performance of the speed controller, such as adaptive control, 7 sliding-mode control, 8 fuzzy control, 9 active disturbance rejection control, 10 model predictive control (MPC), 11 neural network control 12 and control based on disturbance observer (DOB), 13 and so on. These methods improve the speed control performance of the PMSM drive system in different aspects.
Among the above methods, the MPC method has attracted much attention and has been considered as an optimal control method due to its advantages such as simple design, superior dynamic performance, and complete compatibility with digital controllers. 14 With the development of digital signal control technology and the advancement of field programmable gate array (FPGA) technology, the MPC method has been successfully applied in PMSM control systems.15,16 The MPC uses the input and output data of a system to predict system future output, and designs an optimal control law by minimizing a cost function, which consists of the difference between a expected output and a reference trajectory. Comparisons with other control methods show that it has the advantages of good control effect and low requirements for model accuracy. 14 The MPC contains continuous-time MPC and discrete-time MPC. The MPC of PMSM drive system is mainly based on the linear discrete model of the motor such as deadbeat predictive control,17–19 finite control set model predictive control (FCS-MPC),20–22 and so on. However, the design process of the controllers in the above methods is greatly affected by a sampling period. A small sampling period easily leads to a larger prediction time domain, which increases the amount of calculation and affects real-time performance. While a large sampling period leads to the degradation of the system anti-disturbance ability, which increases the difficulty of controller design in practice.
A nonlinear generalized predictive control (GPC) method based on a continuous-time system is presented to achieve fast dynamic response and easy implementation in practical applications. 23 The method uses Taylor series expansion to obtain a predictive model based on a continuous-time model. Then, the nonlinear GPC law of the system is designed by defining and optimizing the cost function composed of the predictive output and the predictive reference. The GPC method has the advantages of fast dynamic response, simple calculation steps, and convenient implementation. It effectively realizes the speed tracking control of the PMSM system. However, the designed GPC controller is still based on the system model that does not directly consider the model uncertainty, which cannot directly eliminate the influence of uncertain factors and external disturbances. To solve this problem, Errouissiet al. presented a robust nonlinear GPC method combined with an integral sliding-mode control. 24 The designed composite controller ensures that the steady-state error of a class of non-matching nonlinear systems is zero. Liu et al. and Zhao et al. designed the speed loop controller of a PMSM drive system based on a nonlinear GPC method.25,26 An extended-state observer is introduced to estimate the load disturbance and parameter perturbation of the system, and the estimates are used for the feedforward compensation of the GPC. The method effectively improves the dynamic response and robustness of the motor speed control. Errouissi et al. 27 presented a generalized predictive double closed-loop control method for a PMSM system and designed a disturbance observer to estimate the offset caused by parameter uncertainty and load torque changes. Shao et al. 28 discussed a robust GPC method with a high-order terminal sliding-mode observer (HOTSMO) for a PMSM control system to achieve fast response, strong robustness, and high anti-disturbance performance of the system. Liu et al. 29 presented a compound control method that combines nonlinear GPC with high-order terminal sliding-mode control to achieve accurate speed tracking. Tang et al. 30 introduced an adaptive nonlinear GPC for a hypersonic aircraft with unknown parameter uncertainties and control surface constraints. An adaptive parameter estimator is designed to update the unknown controller parameters to enhance the robustness of the system.
Compared with the above-mentioned disturbance compensation methods, a method, which does not need the inverse model of the system (this effectively avoids the cancelation between unstable poles and zeros) and does not require external disturbance information or accurate system model, has greater advantages. She et al. 31 proposed such the method of equivalent-input-disturbance (EID). The method uses a state observer and an estimator to estimate the signal on the control input channel, which has the same impact on the system output as external disturbance has, to realize the active compensation for the disturbance. It has been widely used in various control systems such as linear systems, 32 nonlinear systems, 33 time-delay systems, 34 repetitive control systems, 35 fractional order systems. 36 Huang et al.37,38 extended its application to fault-tolerant control systems. A sliding-mode observer (SMO) is introduced to replace a Luenberger observer (LO) used in conventional EID system,38,39 which achieves faster and more accurate estimation of state variables and EID. The strong robustness of the SMO is achieved by the large switching control gain of the sliding-mode function, which leads to a chattering problem. High-order sliding-mode control is widely used to solve the chattering phenomenon. Zhang et al. 40 presented an adaptive second-order nonsingular fast terminal sliding-mode (SONFTSM) control scheme by combining integral terminal sliding-mode and nonsingular fast terminal sliding-mode. This realized the finite-time stability of chattering-free control input for a class of nonlinear uncertain systems.
This paper presents a nonlinear generalized predictive speed control method based on EID to solve the problem of speed control performance degradation for a PMSM drive system with parameter perturbation and load torque disturbance. Firstly, a generalized predictive speed controller is designed to realize the fast dynamic response of speed. Secondly, an EID method based on a NFTSMO is introduced to realize active compensation of the total disturbance in a feed-forward manner. The experimental results show that the method effectively improves the speed tracking performance of the PMSM drive system and has strong robustness. The main contributions of the paper are summarized as follows:
Unlike the work, 25 an EID method instead of an extended state observer (ESO) is introduced into the design of GPC for a PMSM drive system. The estimate of the EID does not need an inverse model of the system. This effectively ensures the stability of the system. Moreover, the designed composite speed controller has strong anti-disturbance ability to parameter perturbation and load torque disturbance;
An NFTSMO instead of an LO in the conventional EID method and SMOs in other existing EID methods is introduced to design the EID system. This eliminates sliding-mode chattering and improves the estimation accuracy of the EID;
Unlike a conventional linear PI method, a conventional GPC method and a GPC method with an ESO, a nonlinear GPC method with an EID is designed. This significantly improves the robustness and the speed tracking performance of the system.
The rest of the paper is organized as follows. Section “System description” describes the mathematical model of a nominal PMSM. Then, the continuous time nonlinear system of the motor mechanical equation is formulated. Section “Design of generalized predictive speed controller for PMSM” introduces the design process of generalized predictive speed controller. The disturbance compensation based on EID and the design of an improved NFTSMO are shown in Section “Disturbance compensation based on EID.” The experimental results are compared in Section “Experimental analysis.” Then, the conclusions are drawn in Section “Conclusion.”
System description
The mathematical model of a PMSM in



where
A PMSM drive system usually uses the vector control scheme of

where


Design of generalized predictive speed controller for PMSM
Based on the above nominal system continuous-time model (4), this section focuses on the design and study of the speed outer-loop generalized predictive controller to achieve high-precision and robust control of the motor speed.
Define a cost function to be

with

where
The relative order


where
Expand the prediction output

Rewrite (11) as

Letting

In the same manner, the predicted reference speed

where
Letting

Thus, according to (13) and (14), the cost function (7) is rewritten as

In order to achieve precise tracking of the speed, the cost function needs to be minimized, that is,

where
So, we can get
Thus, (17) is written as

For the speed loop of the PMSM drive system, the control quantity
Note that the above speed controller is obtained according to the nominal model of the PMSM. That is, the influence of load torque, parameter perturbation and external disturbance on the system is ignored when the prediction model is established. However, external disturbance and parameter perturbation are inevitable in actual engineering applications. Therefore, how to realize the compensation of system disturbance is a key issue to improve the robustness of GPC methods, and it is also very important to improve the performance of the motor drive system.
Disturbance compensation based on EID
In this section, an active disturbance compensation method based on EID is presented. The basic idea of the method is to treat load torque, parameter perturbation and unmodeled disturbance as a total disturbance, and transforms the total disturbance into an EID of the control input. Then, using a designed NFTSMO to estimate the EID, and the estimate is compensated in feed-forward manner. The specific design steps are as follows:
The mechanical equation of a PMSM with parameter perturbation and load disturbance is

where
Letting a total disturbance

It is clear from (19) and (20) that

Rewrite (21) as a state space expression as

where
According to the EID theory, we use

where
Design of NFTSMO and EID estimator
Based on the EID theory, a state observer is used to estimate the EID. The state observer used in conventional EID system is an LO. An SMO is introduced to design the observer to improve the estimation accuracy.38,39 However, there is a serious chattering phenomenon. In order to further improve the estimation accuracy and eliminate the chattering phenomenon, a non-singular fast terminal SMO (NFTSMO) is introduced to replace the existing SMO in EID system.
Design a NFTSMO for the EID system (23) to be

where
A state-estimation error

According to (23) and (24), the derivative of

Substitute (24) into (26) yields

According to (27), we get

Assume that there is a variable

Define the estimate of

Substituting (29) and (30) into (28) yields

Combining (31) and (24) yields

where
Moreover, a low-pass filter

where
Then, the filtered EID,

where
Finally, a compound control law

According to (35) and (18), we have

That is, equation (36) is the designed PMSM generalized predictive speed controller based on EID.
Substitute (35) into (26) yields

Letting

Chose a non-singular fast terminal sliding-mode (NFTSM) surface as

with

where
A NFTSMO control function is designed as

where



with
Stability analysis
The derivative of the NFTSM surface (39) is


The derivative of

Combining (38) and (41) with (42) yields

According to (40), (46) and (47), we have

Since

Since

Substitute (50) into (49), we have

Therefore, the error equation (38) converges to zero.
This completes the proof.
Experimental analysis
This section presents the example of a PMSM drive system that illustrates the validity of the designed method. Figure 1 shows the control block diagram of whole system. Since it is difficult to simulate parameter perturbation in an actual PMSM drive system, we used an RT-LAB hardware-in-the-loop experimental setup. Figure 2 shows the RT-LAB experimental setup, which includes a DSP controller TMS320F2812, OP5600 unit, a computer host, and a motor model as software component. OP5600 unit is mainly used to simulate the rest of the system such as inverter and PMSM. The parameters of the PMSM used in the experiment are shown in Table 1. The control method

Structural diagram of PMSM control system.

RT-LAB experimental setup.
Parameters of PMSM.

Experiments were conducted to verify the speed response performance and robustness to non-matching disturbances of the presented GPC + EID speed control method and compare it with three other methods: a PI control method, a conventional GPC control method without disturbance observer, and a GPC method based on an ESO (GPC + ESO). 25
A second-order linear filter
The reference speed is
Case 1: Experiment with no load
There is no load in the PMSM drive system. Figure 3 shows the speed response curves of the system. Figure 4 shows the

Experimental results of speed response.

Case 2: Experiment with load torque disturbance
When the motor starts with no-load and the speed reaches a stable state, a load torque disturbance of

Experimental results of speed response: (a) speed response of PI control method, (b) speed response of GPC control method, (c) speed response of GPC + ESO control method, and (d) speed response of GPC + EID control method.

Case 3: Experiment with flux-linkage parameter disturbance
When the motor starts with no-load and the speed reaches a stable state, a permanent magnet flux-linkage

Experimental results of speed response: (a) speed response of PI control method, (b) speed response of GPC control method, (c) speed response of GPC + ESO control method, and (d) speed response of GPC + EID control method.

Case 4: Experiment with load and flux-linkage parameter disturbance
Experiment with load and flux-linkage parameter disturbance. Set a load torque to be

Experimental results of speed response: (a) speed response of PI control method, (b) speed response of GPC control method, (c) speed response of GPC + ESO control method, and (d) speed response of GPC + EID control method.
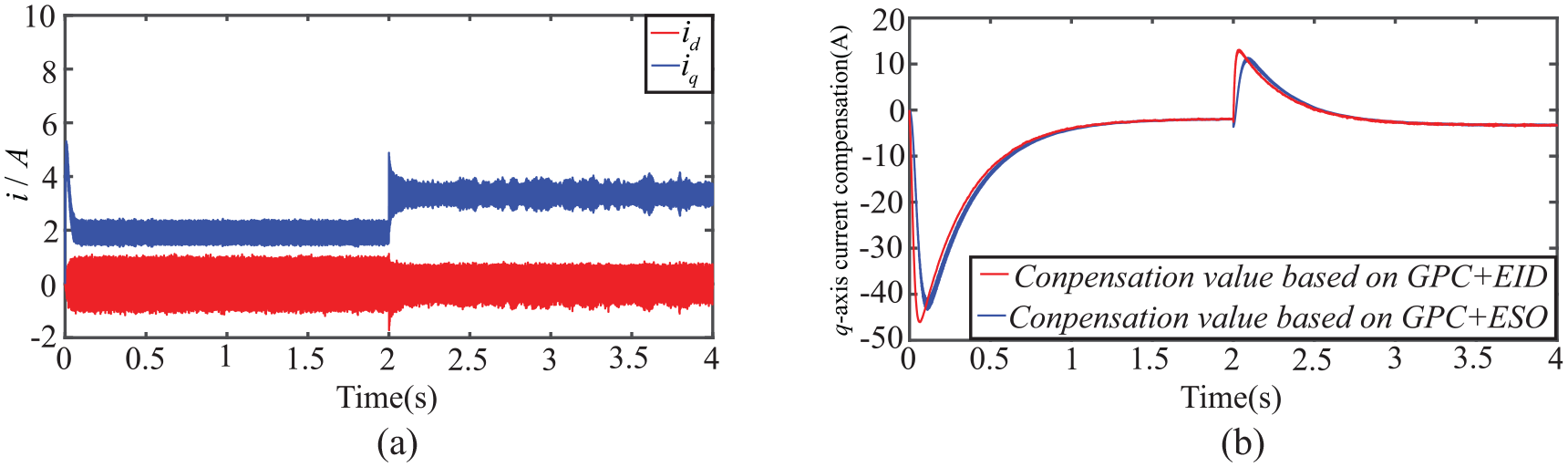
It can be seen from Figures 4(b), 6(b), 8(b) and 10(b) that the
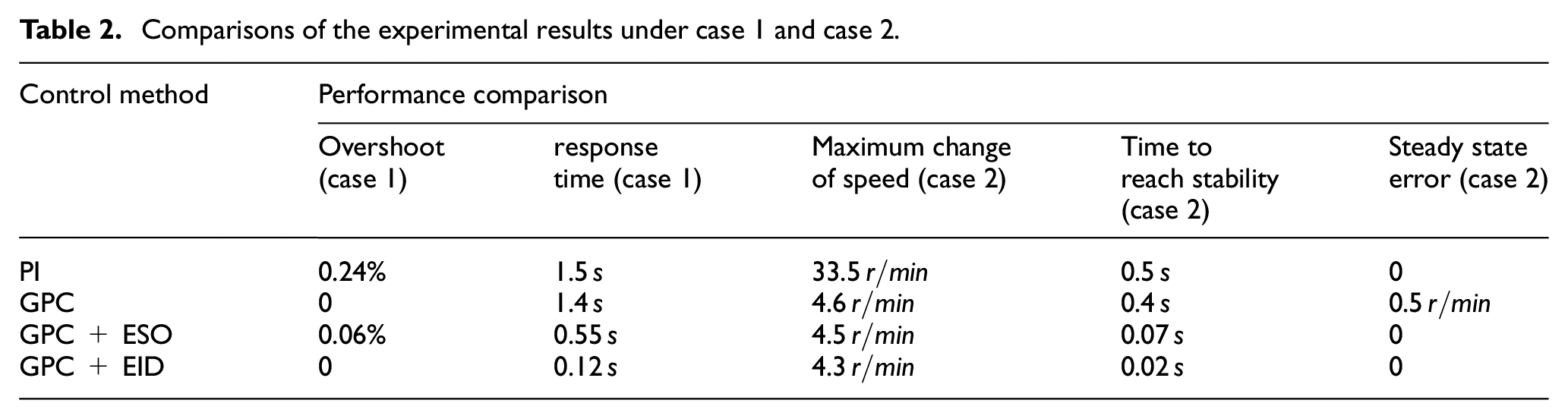
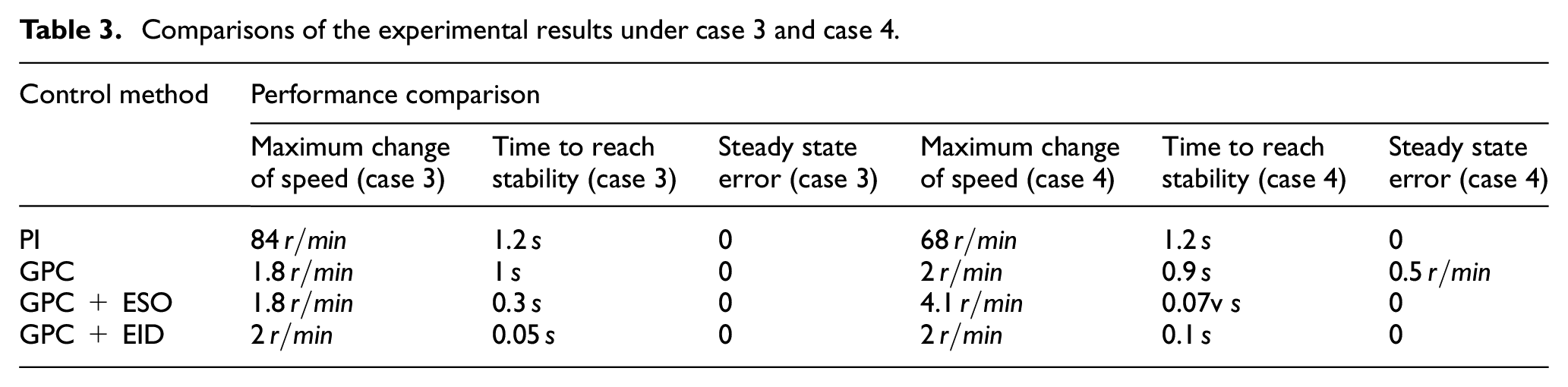
Table 2 shows the comparisons of the experimental results for the four control methods under the case 1 and the case 2. Table 3 shows the comparisons of the experimental results for the four control methods under the case 3 and the case 4. By comparing the above experimental results, we conclude that the presented GPC + EID speed control method has faster response speed, smaller overshoot and stronger anti-disturbance capability than those of the PI control method, GPC control method, and GPC + ESO control method. 25 That is, our GPC + EID control method has better robustness and superiority.
Comparisons of the experimental results under case 1 and case 2.
Comparisons of the experimental results under case 3 and case 4.
Conclusion
This paper studied the speed tracking problem of a PMSM drive system with parameter perturbation and load torque disturbance. A new GPC + EID speed control method is presented. A PMSM speed controller under the nominal state is given based on the continuous-time generalized prediction theory. Then, an active disturbance compensation EID method based on a NFTSMO is designed to solve the problem of speed tracking performance degradation caused by parameter perturbation, load torque, and other non-matching disturbances. This method greatly improves the anti- disturbance ability of the speed loop without sacrificing the nominal control performance of the system. The experimental comparison results showed the validity of the presented method and its advantages over PI one, GPC one, and GPC + ESO one. In addition, the coupling effect of the parameter perturbation and permanent magnet flux linkage will be studied in the future.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (No. 2021YFF0501101), the Natural Science Foundation of China (Nos. 52172403 and 62173137), Scientific Research Fund of Hunan Provincial Education Department, China (Nos. 21A0354 and 20A162), Natural Science Foundation of Hunan Province, China (No. 2021JJ50052), Postgraduate Scientific Research Innovation Project of Hunan Province (No. CX20211084).