
Abstract
Electro-hydrostatic actuator (EHA), as an emerging power-by-wire (PBW) actuation mechanism with high energy efficiency and fast responsiveness, has been widely used in modern flight control systems. As a pivotal component, the fault diagnosis of EHA is necessary to ensure the reliability of the aircraft. Although researchers have proposed many effective fault diagnosis techniques at present, most of them can only deal with single-factor faults effectively. Recent studies on multi-state reliability and competing failure show that complicated systems such as EHA are more prone to multi-factor failures than single-factor failures. Therefore, an improved EKF based on excitation equivalent conversion is proposed in this paper to achieve the multi-factor fault diagnosis of EHA. First, the existing fault diagnosis methods for EHA and their limitations in multi-factor fault diagnosis are discussed. Then, multi-parameters estimation and observability, the key issues to achieve multi-factor fault diagnosis, are analyzed. Based on the structural characteristics and observability analysis of the second-order system, excitation equivalent conversion is introduced to establish additional available equation about the unknown state parameters to realize the multi-parameter estimation when system is unobservable. Finally, simulation and prototype test experiments have been performed, and the results demonstrate the efficacy of the proposed method, which outperforms that of the traditional single-factor failure analysis methods by comparison.
Keywords
Introduction
A servomechanism is a widely used drive actuator in modern industrial systems that magnifies and converts engine power according to the command signal to accomplish accurate motion and trajectory control.1,2 Electro-hydrostatic actuator (EHA), as a new type of servomechanism based on the closed-loop hydrostatic transmission principle, directly connects hydraulic pump and actuator to achieve power transmission, which effectively reduces throttling loss and simplifies the system architecture, enabling a high degree of modularization.3–5 EHA is therefore gradually being employed, particularly in aerospace for flight surface control. As a critical component, the reliability of EHA has a significant impact on the overall performance of the equipment. Redundant design and fault diagnosis are the most commonly used strategies to ensure reliability.6,7 Even with the redundant design, long-term operation and poor working circumstances will inevitably lead to unpredictable malfunctions. Therefore, it is worthwhile to conduct research on the fault detection of EHA.
EHA is a highly integrated system consisting of electromotors, hydraulic components, and control units, which results in various failure modes. In recent decades, although there have been a variety of novel and effective methods, due to the distinctive structural characteristics of EHA, most of them cannot detect the faults of EHA effectively.8,9 In addition, due to the effect of variable load, the response signal of EHA exhibits high nonlinearity and uncertainty. To detect the faults in EHA effectively, scholars have launched a series of related studies. Aiming at the uncertainty of monitoring signal, Qin et al. 10 and Xiao et al. 11 utilized principal component analysis (PCA) to process the original signal to extract statistical features and combined it with support vector machine for fault diagnosis. Cui et al. 12 employed the scheme of fault injection to investigate the signal characteristics of EHA under common faults, which provides a theoretical basis for its fault diagnosis and tolerant control. Chen et al. 13 and Zhao et al. 14 employed PCA to optimize the weight coefficients of neural networks and utilized improved neural networks to achieve abnormal parameter identification and unsupervised fault classification in the case of unlabeled data. To process the multi-source signals with information redundancy effectively, Wang et al. 15 and Miao et al. 16 conducted a series of experimental investigations and compared the processing results of various deep learning algorithms, which demonstrated the effectiveness of convolutional neural network in fault diagnosis of EHA. However, the above methods are mainly data-driven approaches. These methods exploit information acquired from available signals to identify the patterns of degradation progress and accomplish fault diagnosis without using a physical model.17–19 With the advent of powerful digital computers and sensors, data-driven methods are increasingly used in the fault diagnosis of complex system. However, this method requires a mass of data that includes all possible modes of failure to ensure the accuracy of diagnosis results, which is not very suitable for novel device systems without enough failure data.
Physics-based approaches, another effective technique for fault diagnosis in engineering systems, establish the physical model based on the system’s working principle and combine it with measured data to achieve fault diagnosis. 19 Although measurements are also needed, this method requires a detailed understanding of the system to develop an accurate failure physical model rather than a large amount of fault data for fault diagnosis. Faults in a system can change its parameters and then affect its dynamic performance. With an accurate baseline model, system measurements can be taken and fed for parameters estimation. Deviations of these parameters from their normal values can be interpreted as faults. Parameter estimation is the basis for fault diagnosis, and an accurate physical model is necessary to obtain accurate estimation results. However, because EHA is a complicated equipment system referring to multiple disciplines, it is difficult to obtain its failure physical model directly. To overcome this problem, Yuvin converted the original structure of EHA into a series form of two second-order systems based on automatic control theory, which allows the decoupling between different components and dramatically diminishes the difficulty of failure model modeling. 20 And the unknown state parameters of EHA were then estimated precisely through extended Kalman filter (EKF), taking into account the uncertainty of modeling and measuring. As an optimal recursive processing algorithm, KF can effectively deal with the problem of parameter estimation of a system with uncertain information as an optimal recursive processing algorithm, but it requires the uncertainty to follow a strict Gaussian distribution, which is not satisfied in many engineering applications. Particle filters, also known as the sequential Monte Carlo method, approximate the state of a probability density function with a set of weighted particles. 21 With sufficient particle samples, it can approximate any probability density distribution. Besides, particle filter can effectively deal with parameter estimation of nonlinear systems. However, the huge computational cost severely restricts its application, especially for online state estimation. Thus, Song and Gadsden and Habibi proposed the smooth variable structure filter (SVSF).22–24 Based on the variable structure control theory, SVSF adopts variable structure gains, which make it robust to disturbances and can ensure stability under bounded uncertainties. However, the above studies focus primarily on single-factor fault diagnosis and assume that faults can only change one system parameter. According to recent studies on multi-state reliability and competing failure, it is more reasonable that a complicated multiple-component system like EHA experiences multi-factor fails.25–27 For example, thermal equilibrium failure and oil pollution will affect the bulk modulus and damping constant of the hydraulic system simultaneously, both of which have a significant impact on the EHA’s dynamic performance. Nevertheless, the multi-factor fault diagnosis of EHA requires the simultaneous estimation of multiple unknown state parameters, which will make the system unobservable and lead to failure for diagnosis.
Therefore, an improved EKF based on excitation equivalent conversion is proposed in this paper to realize the multi-factor fault diagnosis of EHA. According to the principle of excitation equivalent, the input excitation is expressed as a linear combination of system parameters, and then the control matrix of EKF can be employed to provide an additional equation to deal with the problem of unobservability. With the assistance of the additional equation, the unknown state parameters can be estimated accurately. Compared with traditional single-factor failure analysis, there is a 20% decrease in the estimation error. The remainder of this paper is organized as follows. In Section “Preliminary theories analysis,” the theoretical basis associated with EHA and EKF is reviewed. A detailed description of the improved EKF is presented in Section “Improved Extend Kalman filter.” Furthermore, numerical simulation and experimental prototype platforms are constructed to testify the efficacy of the proposed in Section “Experimental verification analysis.” Section “Discussion and conclusions” summarizes the research presented in this paper and discusses future work.
Preliminary theories analysis
EHA modeling analysis
The EHA is a pump-control system consisting of electromotor, hydraulic components, and control unit in series, as shown in Figure 1. The control element transmits driving impulses according to the system command to control the speed and direction of the electromotor. The hydraulic pump, coupled with the electromotor, then pumps fluid flow into the hydraulic cylinder, which induces a pressure differential between the two chambers. The piston rod, driven by the pressure difference, resists the external loads, and moves as intended. A schematic of the system’s control strategy is depicted in Figure 2. As shown in Figure 2, EHA adopts direct drive volume control to connect the pump and actuator directly and achieve flow rate control by altering the speed of the electric motor, which drives the pump. Compared to conventional valve-controlled hydraulic servo systems, the EHA operates with no overflow loss, resulting in high efficiency and reliability. Then key components, electromotor, plunger pump, and hydraulic cylinder are modeled separately in this paper. And the whole model is obtained by integrating the models of each part.

EHA structure and principle schematic diagram.

Control block diagram of the EHA.
Electromotor is the critical component of EHA that converts the electric power from power source into appropriate kinetic energy that drives the hydraulic pump. Based on electromagnetic induction principle, the operating process of the electromotor can be described using the voltage equation and motion balance equation as follows:

where Ue is the armature voltage; Re is the total resistance of armature circuit; ie is the armature current; Le is the armature inductance; Ke is the back electromotive force constant; ωe is the angular velocity of the electromotor; Kt is the electromagnetic torque constant; Jm is the total rotational inertia of the rotor and the shaft; Bm is the damping constant of the rotor and the shaft; Tp is the load torque of the electromotor.
Then the transfer function of electromotor can be derived by taking the Laplace transform of equation (1) as follows:

The hydraulic subsystem, consisting of a pump and a cylinder, is the actuator of the EHA, and its primary function is to convert rotary motion into linear motion. According to Bernoulli principle, the working process of the hydraulic subsystem can be described using flow equation, continuity equation, and dynamic equilibrium equation as follow:

where Qf is the delivery flow of the pump; Dp is the displacement of the pump; Cip is the leakage coefficient of the pump; P1 is the load pressure of the hydraulic subsystem; Aa is the effective area of the piston; xa is the displacement of the piston; V1 is the volume of the cylinder; βe is the effective bulk modulus of hydraulic oil; Cia is the leakage coefficient of the cylinder; Ma is the equivalent mass of the hydraulic subsystem; Ba is the damping constant of the cylinder; F1 is the load force exerted on the EHA.
Then the transfer function of hydraulic subsystem can be derived by taking the Laplace transform of eqution (3) as follows:

where Ci = Cia + Cip denotes the comprehensive leakage coefficient of the hydraulic system.
Transfer function formulation indicates that the electromotor is a second-order system, and the hydraulic system is a type I third-order system. Moreover, the type I third-order system can also be treated as a second-order system from the point of system’s feature. According to the theory of automatic control, the response features of the second-order system are dictated by its natural frequency and damping ratio for a given excitation. The variation in parameters due to fault will directly change natural frequency or damping ratio, which will then have an impact on the response features. According to equation (4), there are three variable parameters related to the system failure, namely effective bulk modulus, leakage coefficient, and damping constant. Bulk modulus is related to the stiffness of liquid. The decrease of bulk modulus will directly reduce the gains and bandwidths and cause the system instability. Leakage and friction are the sources power losses in hydraulic system. Excessive leakage flow will increase the damping ration and reduce system’s efficiency. Therefore, the fault diagnosis of EHA is essentially to estimate the variation in parameters.
Parameters estimation based on extended Kalman filter
The deviation of the critical parameters from their expected values can be explained as faults to some extent. However, these parameters belong to the system’s internal state variables, which sensors can not measure. For the estimation of the unmeasurable parameters, researchers have proposed two categories methods: observer-based and filtering-based approaches.9–12 Based on the state-space, observer-based and filtering-based approaches have been developed to estimate the unmeasured internal parameters of the system for and fault diagnosis fault-tolerant control. If there is no noise in the measurement signal and the system model is accurate enough, system’s unmeasured internal parameters can be obtained easily by observer-based approaches such as the Luenberger observer. Unfortunately, noise and perturbations are inevitable in the measurement process, and there are uncertainties in the modeling process due to factors such as nonlinearity and approximation. Based on statistical theory, researchers employed the stochastic process to describe the uncertainties in modeling and measurement, and proposed filtering-based methods. The extended Kalman filter, a modified version of the Kalman filter, is a widely used Gaussian filtering algorithm for parameter and state estimation of nonlinear systems.
Basically, the KF is an optimized linear recursive algorithm based on Bayesian statistical inference to estimate the unknown state parameters of a dynamic system from noisy data. Figure 3 depicts a KF-based block-diagram scheme for parameters estimation. Given the modeling and measurement uncertainties follow Gaussian distribution, then the state-space model of the dynamic system with perturbation information can be described as follow:


Block-diagram scheme of parameter estimation based on Kalman filter.
where
Then the recursive estimation process of the state parameters employing KF can be divided into the following five steps:

where

where

where Kk is the KF gain; H T is the transposed matrix of observation matrix H. The KF gain is a weight coefficient based on Bayesian statistical inference with the minimality of error variance to provide an optimal state estimate.

The measured data is introduced to modify the prior estimation of the state vector, so that the modeling uncertainty will not be amplified infinitely. The KF provides an optimal estimation method by which researchers can fuse two uncertain data sets to get a relatively accurate result.

where I is an identity matrix; Pk is the updated covariance matrix. The main reason for updating the covariance matrix is to accomplish the subsequent cycles of the recursive process.
Multi-parameter estimation and observability analysis
As one of the most important discoveries in statistical estimation, the Kalman filter allows people to estimate the states and parameters of linear systems in real-time. And its successful application in NASA’s lunar and Apollo missions made it the most popular estimation technique. But at present, research about the Kalman filter for fault diagnosis in EHA is mainly focused on the case of single-factor fault, assuming that only one fault occurs at one time and the fault is only related to a single parameter. Single-factor failure mode is a simplification of the practical situation based on the assumption of mutual independence in traditional binary reliability theory. For example, in the case of single-factor failure, the wear and aging of the seal will only affect the leakage of the system. However, an increase in leakage also means an increase in energy loss which will change the thermal equilibrium and ultimately affect the bulk modulus and damping constant. Multi-factor failure mode considers that each component of the system will gradually degrade during operation, and system’s failure is determined by the comprehensive performance of each part.25–27 Compared with single-factor fails, it is more reasonable that a complicated multiple-component system like EHA experiences multi-factor fails. However, to achieve the multi-factor fault diagnosis, it is necessary to estimate multiple key parameters simultaneously, which may lead to the system unobservable. Observability is an important concept in modern control theory for the reconstruction of unmeasurable state variables. For filter-based methods, either EKF or SVST, their successful application requires the system be observable.20,28 The observability of a system is directly related to the number of unknown parameters to be estimated. According to the Cayley-Hamilton theorem, a system is known to be completely observable if the rank of its observability matrix is equal to the number of state variables. 1 As the number of state variables increases, the observability may alter, rendering the observable system unobservable. That is to say, if the number of unknown parameters exceeds the number of available equations, the system is unobservable. For an unobservable system, reconstruction of an unmeasurable state variables is not unique, which means there may be difference between the estimated parameters and its real values.
Take the mass-spring-damper (MSD) system, a typical second-order system, as an example. The motion balance equation of MSD system is shown as follow:

where x is the displacement of the mass block respectively; k is the spring constant; c is the viscous damping coefficient; m is the mass; F is the exciting force.
When there is only one unknown state parameter such as the spring constant k that needs to be estimated, the state-space model of the system is shown as follows:

where x1 and x2 are the displacement and velocity of the mass block respectively; x3 represent the unknown spring constant to be estimated.
The linearized state-space model with displacement as the measurement is as follows:

where J is the Jacobian matrix of the nonlinear system. The expression of J is:

Therefore, the observability matrix is written as:
The rank of the observability matrix is 3, equal to the length of the state vector, which means the system is observable.
However, for the situation that more than one unknown state parameters such as the spring constant k and the viscous damping coefficient c that need to be estimated simultaneously, the Jacobian matrix of the nonlinear system is as follows:

And the observability matrix is written as:

The rank of the observability matrix is 3, compared to the length of the state vector of 4, and therefore it is confirmed that the system is unobservable. Figure 4 depicts the results single-parameter and dual-parameter estimation for the MSD system utilizing EKF. As shown in Figure 4, estimation result of unknown parameters for observable system converges to their true values. While for an unobservable system, estimation result of unknown parameters converge to some other value rather than their known values, which can’t be used for multi-factor diagnosis.
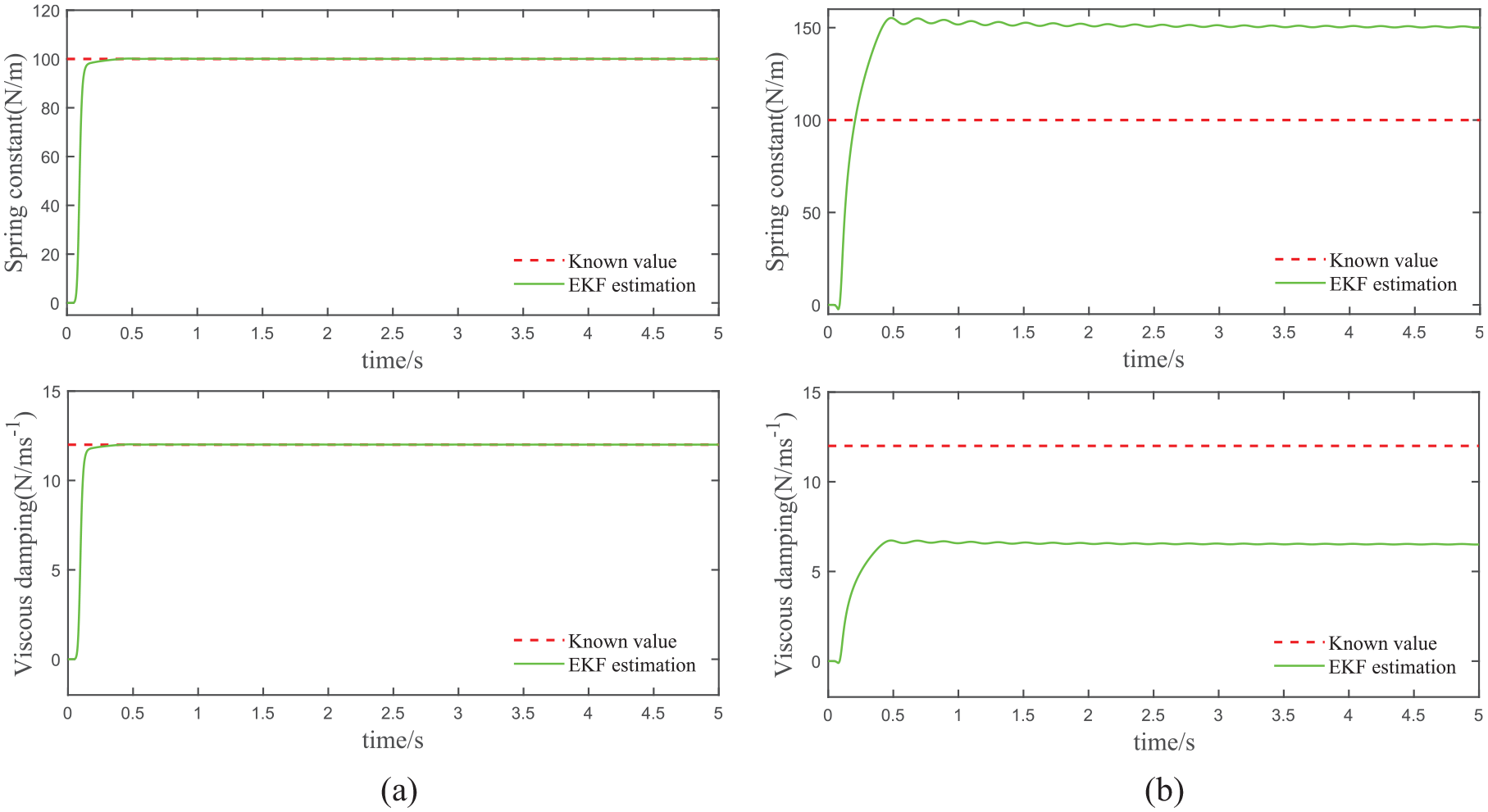
Comparative analysis of estimation result for single and dual parameters: (a) single parameters estimation and (b) dual parameters estimation.
Improved extend Kalman filter
Based on the above analysis, EKF can accurately estimate the unknown parameter of an observable system and realize the single-factor fault diagnosis. However, the the multi-factor fault diagnosis of EHA requires the simultaneous estimation of multiple system parameters, which may lead to the system being unobservable. Adding sensors to provide more information available can solve this problem. But it is troublesome to add sensors due to the high integration of EHA, moreover there is little spare space in aerospace for additional sensors. Therefore, an improved EKF based on excitation equivalent conversion is proposed to accomplish multi-factor fault diagnosis of EHA without adding sensors.
The motion balance equation of MSD system shown in equation (12) gives an analytical relationship between the motion response of the system under the excitation force and its system parameters, but it requires anther available equation about system’s parameter to deal with the the issue of system observability for multi-factor diagnosis. The left-hand side of equation (12) is the inherent structure of the MSD system, which cannot be change. Meanwhile, inspired by the vibration analysis of single degree of freedom model, virtual displacement and velocity are used to transform the excitation force to obtain an additional available equation.
Given the excitation of the MSD system are displacement and velocity shown in Figure 5, then based on Newton’s second law the system’s motion differential equation can be derived as follows:


Structure diagram of the MSD for excitation equivalent conversion analysis.
where x denotes the displacement of mass; xi denotes the displacement of the excitation; and xe is their difference.
After equivalent transformation, the motion equation of the MSD system can be expressed as follows:

By comparing equations (11) and (19), it can be seen that excitation in the form of force can be expressed as a linear combination of spring constant and viscous damping using displacement and velocity excitation, which can provide another available equation to deal with the issue of system observability.
Through excitation equivalent conversion, although rank of the observability matrix is still 3 for dual parameters estimation, the input control matrix changes from its original form

to
And the estimation result of unknown parameters precisely converges to their true values.
Theoretically, the improved EKF can effectively deal with the dual parameters estimation of second-order system under various excitation forces, but it is only applicable to sinusoidal excitation force in practical application since the equivalent conversion error for other excitation will makes the filtering algorithm divergence and result in parameters estimation failure. Given a sine excitation force F = F0·sin(ωt), and the displacement excitation xi = A·sin(ωt + α), according to the excitation equivalent of conversion, the following equation can be obtained:

then A and α can be as described following:

Excitation equivalent conversion is a common technique in vibration analysis. The above research described the excitation equivalent conversion from the perspective of the MSD system. As a typical second-order system, MSD system has the common characteristics of second-order systems. Hence, the above conversion method can also be applied to the general second-order system. The general expression of a second-order system is as follow:

where K is proportion gain; p and q are the second-order and first-order coefficient of the system respectively; r is the constant coefficient.
According to the theory of automatic control, second-order coefficient represent the inertia of the system. The first-oder coefficient is related to the energy loss. While the constant term represents the rigidity which is relative to system’s static stability. Therefore, they have the same meaningful as mass, damping and stiffness respectively. Hence, replacing the parameters m, c, k with quadratic coefficient p, first coefficient q, and constant term coefficients r is the equivalent conversion for the general second-order system.
Although the improved EKF can only estimate dual parameters under sinusoidal excitation force, this is also a very common excitation form in engineering application. In the next section, simulation and prototype test experiments have been performed to testify the efficacy of the proposed method for EHA multi-factor diagnosis.
Experimental verification analysis
As the transmission medium of EHA, the properties of hydraulic fluid have a significant impact on the performance of EHA. Hydraulic fluid is typically treated as an ideal fluid with no air or gas content, ensuring that properties like bulk modulus and viscosity remain constant. But in engineering systems, the hydraulic fluid will always contain gas. With the gas in hydraulic fluid dissolved or released, known as aeration or cavitation phenomena, the bulk modulus and viscosity will change sharply. A lowered bulk modulus will cause system instability and affect the system’s performance, lowering gain and bandwidth. While the increase in viscosity, related to the damping ratio, will reduce the system’s efficiency. Thus, the effective bulk modulus and damping ratio, which relate to the above properties of hydraulic fluid, are selected as the target parameters to be estimated. Additionally, EKF is also used to process the experimental data, and the comparative results fully demonstrate the efficacy of the proposed method for multi-factor fault diagnosis in EHA.
AMEsim simulation analysis platform
Although EHA is becoming more widely used as a new type of equipment in many fields, its application time is relatively short, limiting the amount of fault data available. Therefore numerical simulation and prototype testing are commonly used for relevant validation analyses. However, due to fluid flow in a pipe being a complex process correlated to Reynolds number, thermal, and pipe shape, simulation analysis software, such as Matlab and Adams, cannot effectively deal with hydraulic modeling due to a shortage of corresponding modules. The AMEsim, forged by Imagine, is a robust modeling analysis tool for hydraulic and mechanical modeling with plenty of parameterized modules. The simulation model of EHA built on the AMEsim platform is displayed in Figure 6. The parameters are listed in Table 1.
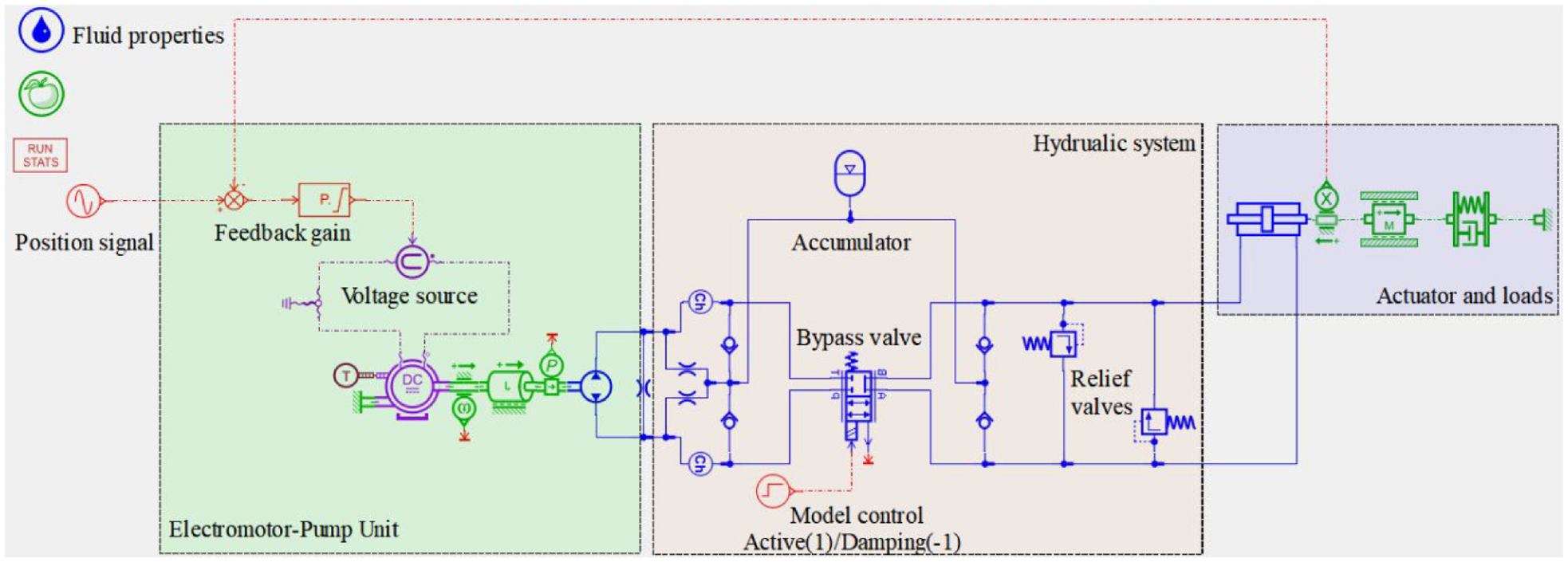
Simulation mode of EHA built in the AMEsim platform.
Parameters of the EHA simulation model.
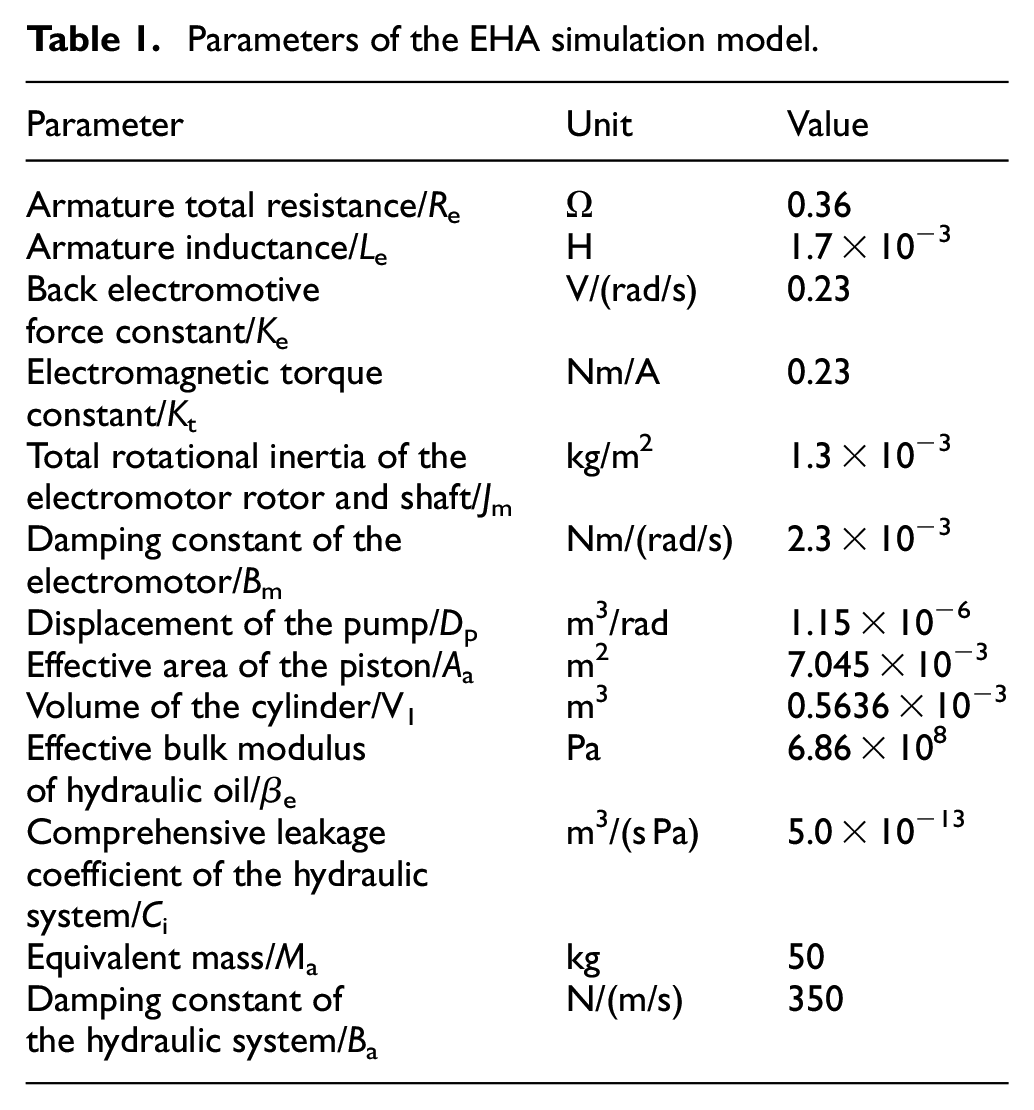
In this case, the hydraulic fluid gas content is increased from the default 0.01% to 10% to simulate the oil contamination that could occur in engineering situation due to seal failure. With the increase of oil gas content, the values of βe and Ba change from the default values to 425 MPa and 287 N/(m/s), respectively. The input command signal is a 10 rad/s sine wave with a 20 mm amplitude. Firstly, it is assumed that the value of the damping constant remains the default value 350 N/(m/s), and the change of oil gas content only affect the effective bulk modulus from the perspective of single-factor failure mode. And EKF is employed to estimate the effective bulk modulus of the hydraulic fluid. The result is shown in Figure 7. It should be point out velocity rather than displacement is used as the measurement for EKF in order to converted the EHA into a second-order. It can be seen from Figure 7 that not only the estimated effective bulk modulus does not converge to the known value, but there are also visible differences between the estimated and simulated velocity and acceleration. The quantitative errors are listed in Table 2. The estimation errors for this case are listed in Table 2. The estimation error of effective bulk modulus is 21.25% which is beyond the accepted range and leads to a distinct difference in the output response. In this situation, there is only one unknown parameter, effective bulk modulus, to be estimated and the system is observable. For an observable system, there should be only a very small error between estimation and simulation. However, due to the incorrect value of damping ratio causes the EKF state-space equation differ from the simulation model, resulting in inaccurate estimation results. Analysis results obtained by Figure 7 show that signal-factor fault diagnosis cannot deal with this case effectively.

Estimation results utilizing EKF from the the perspective of single-factor failure mode.
Parameter and response estimation error for single-factor failure mode.

Next, the EKF and improved EKF are applied to the simulation model to estimate effective bulk modulus and damping constant simultaneously from the viewpoint of a multi-factor fault. And the process results are presented in Figures 8 and 9, respectively. The system’s states are estimated accurately with on discernible difference in velocity and acceleration between the estimation and simulation in Figures 8 and 9. But in Figure 9 the parameters match their known value with a small margin of error, while they converge to other constant values in Figure 8. As shown in Table 3, although the output response errors in velocity and acceleration are less than 0.05%, the estimation errors in effective bulk modulus and damping constant are more than 85%. By comparing the single-factor and multi-factor failure mode analysis results shown in Tables 2 and 3, it can be seen EKF can not achieve the accurate estimation of parameters and output responses simultaneously. An accurate parameters estimation is the basis for fault diagnosis. The consistency of output responses is a necessary condition and external features of the parameter estimation. Moreover, since the value of the estimated parameters is known in this simulation case, the merits of the two methods can be judged easily. However, in the practical engineering application, the estimated parameters’ values is unknown, therefore more evidence is needed to prove the effectiveness of the proposed method.

Estimation results utilizing EKF for multi-factor fault diagnosis.

Estimation results utilizing the improved EKF for multi-factor fault diagnosis.
Parameter and response estimation error for multi-factor failure mode.

In terms of estimating velocity and acceleration, there is little difference between EKF and the proposed method, but the parameters estimation result of the proposed is more precise than that of EKF. If this is true, the output response of the proposed method should be also closer to the original system than that of EKF for any other command signal. To testify this hypothesis, simulation model based on the the parameters estimation result and the corresponding responses for a 15 rad/s sine wave command signal with a 20 mm amplitude are shown in Figure 10. As shown in Figure 10, the response of the proposed method is basically the same as that of the original model under the new command, but there are visible amplitude and phase differences for the case of EKF, which verifies the hypothesis and demonstrate the efficacy of the proposed method for multi-factor fault diagnosis in EHA. Analysis results shown in Figure 10 and Table 4 indicates that the consistency of output responses can be regarded as a necessary and sufficient conditions to judge the accuracy of parameter estimation. In the case of accurate parameters estimation, the consistency of output responses shouldn’t vary with the variation of the command signal. In other words, the output response must have a good consistency for any two command signals, so as to demonstrate the accuracy of parameters estimation. Furthermore, the above verification process offers a viable alternative to demonstrate the proposed method’s efficacy in a practical engineering application.

Response analysis of EKF and the improved EKF.
Response analysis of EKF and the improved EKF.

Experimental prototype test platform
Simulation analysis results presented in Section “AMEsim simulation analysis platform” show that the improved EKF is more effective than the EKF for multi-factor fault diagnosis in EHA. However, some random factors, such as system clearance, nonlinear friction, and environmental interference, are simplified in the simulation model. And these random factors leads to signals collected from real engineering applications being more complex than those in simulation models. As a result, an experimental prototype test platform has been adopted to demonstrate the effectiveness of the proposed improved EKF in practical applications. The EHA prototype test platform is illustrated in Figure 11. It mainly consists of a control computer, a data acquisition/drive device, and an EHA prototype. The prototype adopts an integrated valve-block design. As shown in Figure 12(b), this design scheme adopts oil holes rather than hydraulic pipelines to connect hydraulic components, which can effectively reduce the pressure loss along the hydraulic pipeline and improve the dynamic features of the system. Furthermore, the integrated design is widely used in various engineering applications, especially in the aerospace industry, since it can significantly save installation space. In this paper the prototype adopts an integrated design scheme so that the experimental data matches the measured data in the engineering application as consistently as possible. With Table 5 listing its main parameters, Figure 12 displays the prototype’s 3D model and the perspective of the integrated valve-block.

Laboratory prototype test platform of the EHA.

3D model of the EHA prototype and the perspective of the integrated valve-block: (a) 3D model of the prototype and (b) perspective of the integrated valve-block.
Parameters of the EHA prototype test rig.

Due to the system parameters can not be set as accurately as the simulation analysis, the values of effective bulk modulus and damping constant under standard test condition are taken as reference values, and their actual values are estimated in the experimental test. The hydraulic oil used in this case is L-HM-46 anti-wear hydraulic oil. The values of βe and Ba under 42°C standard test condition are 1200 MPa and 43.5 N/(m/s), respectively. However, due to the variation in temperature and gas contaminant in real-work conditions, their values are bound to fluctuate.
For fault diagnosis based on parameter estimation, the crucial issue is how to recognize the unknown parameter related to the system’s fault. In the simulation analysis model, the value of fault parameters to be estimated is available. While in practical application, they are unavailable. Fortunately, the analysis results in Section “AMEsim simulation analysis platform” suggest that the consistency of output responses can also be used to judge the accuracy of parameter estimation. Firstly, the effectiveness of the EKF was analyzed from the perspective of single-factor failure mode. Meanwhile, assuming βe takes the default reference value 1200 MPa in this case, Figure 13 shows the single-factor fault diagnosis results employing EKF. Similar to the simulation analysis results, there are visible differences between the estimated state and the system response, indicating that the parameter’s estimation is off by a significant amount. Quantified estimation error listed in Table 6 indicates that estimation errors in experimental test are nearly double of the simulation case. As a result, precise fault diagnosis of EHA based solely on the results presented in Figure 13 is impossible. In addition, comparing Figures 9 and 13, it is clear that the experimental data contains more random noise than the simulation signal.

Experimental of EKF signal-factor fault diagnosis.
Parameter and response estimation error for single-factor failure mode.

Simulation analysis and experimental test results show that the single-factor fault diagnosis can not accurately the fault parameters of the system due to it ignoring the correlation between faults. Then, fault diagnosis actions from the perspective of multi-factor failure are verified. And fault diagnosis results by means of EKF and the proposed improved EKF are depicted in Figures 14 and 15 respectively. As shown in Figures 14 and 15, although there is a slight deviation between the estimated states and the system’s response due to the influence of random noise, the state estimation results of the two methods match the response of the system very well. But there are obvious differences in parameters estimation. For EKF, the estimated effective bulk modulus is 870 MPa and the estimated damping constant is 109 N/(m/s), while they value are 750 MPa and 85 N/(m/s) respectively for the improved EKF. To decide which estimation is more appropriate, response analysis under new command signal is then adopted, and the results are shown in Figure 16. As shown in Figure 16, the response amplitude of EKF is smaller than that of the system. For the case of the improved EKF, although there is a slight fluctuation in the system’s response, the velocity and acceleration match that of the system very well. Quantified response errors listed in Tables 7 and 8 illustrate the above differences more visualized. Experimental analysis results in this case show that the improve EKF can accurately estimate the unknown parameters despite there being random noise. Simulation and experimental results in this section powerfully demonstrates the efficacy of the improved EKF for EHA multi-factor fault diagnosis.

Experimental of EKF multi-factor fault diagnosis.

Experimental utilizing the improved EKF for multi-factor fault diagnosis.

Response analysis of EKF and the improved EKF.
Parameter and response estimation error for multi-factor failure mode.

Response analysis of EKF and the improved EKF.

Discussion and Conclusions
As a new type of servomechanism with many advantages, EHA has been widely used in many industries and the faults of EHA will cause a series of consequences from control system failure to irretrievable economic loss. In order to deal with multi-factor faults diagnosis of EHA more efficiently, an improved EKF based on excitation equivalent conversion is proposed in this paper. Based on a thorough examination of the structural characteristics of the second-order system and excitation equivalent conversion, the excitation force has been expressed as a linear combination of the system’s internal parameters using displacement and velocity excitation, which provides an addition available equation to solve the key problem of system unobservable in multi-fault diagnosis. Furthermore, simulation and laboratory prototype test experiments have been performed, and the analysis results demonstrate the efficacy of the proposed method.
But as mentioned in Section “Experimental verification analysis,” the improvement strategy presented in this paper can only deal with multi-factor faults diagnosis of EHA under sinusoidal excitation. According to Fourier transform, although any function can be expressed as a linear combination of sine functions by certain decomposition, this process involves a secondary conversion of the excitation, which will make the filtering algorithm divergence due to the equivalent conversion error. In the future, the authors will carry out further research work to convert the excitation in a more effective way.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Natural Science Foundation of China (Grant No. 51975535), and special thanks are also expressed to the reviewers and editors for their valuable comments.