
Abstract
An approach for analyzing and quantifying the irregular wear effect of planar multi-body mechanical system with multi-clearances is proposed. The classical planar four-bar linkage is used as a demonstrative example to study the mechanism of irregular wear effect of multi-body system with multi-clearances. The system dynamic equation is established using Lagrange multiplier method, the contact force and friction in the process of contact collision are respectively modeled using the Lankarani-Nikravesh (L-N) nonlinear contact force and LuGre models, and the wear depth prediction model for multi-clearance joints is built based on Archard’s equation. The influence of the crank speed, clearance number, clearance position and clearance size on the wear effect of multi-clearances system is comprehensively studied. Numerical simulation results show that the wear depth joint increases with increase of crank speed, and there are significant differences in the wear depth of different clearance joints. When the clearance size changes, the significant nonlinear wear phenomenon appears at different joints, when the clearance size of different joints meets a certain proportion, the system wear phenomenon is the least. The obtained valuable results provide important theoretical support for the optimal design of multi-clearance joints system.
Introduction
The existence of clearance is inevitable in practical mechanical systems due to design, manufacturing, assembly and wear factors.1–3 The existence of joint clearance makes the mechanism deviate from the ideal motion trajectory, which intensifies the impact-collision force between the internal components of the system, resulting in serious vibration, friction, noise, and wear of the system.4,5 Classical dynamic analysis ignores the influence of joint clearance, that is, it assumes that the components are ideal links. At the same time, the wear effect caused by clearance joints is also ignored.
The wear effect is the most important and complex phenomenon in the contact collision problem. At the same time, wear is also an important factor that causes the failure of the mechanical system. 6 In the multi-clearance joint mechanism system, the wear is affected by the geometric size of the contact body, contact temperature, material properties and clearance size, etc. The change of any parameter may cause the change of the wear effect.7–9 Therefore, in order to study the mechanism of wear failure in multi-clearance joint mechanisms, focuses on exploring the wear effect of clearance joints.
In the past few decades, there are many researches on dynamics modeling, improvement of contact force models and wear of mechanisms with single clearance joint. 10 However, the research on the dynamics of multi-clearance joint mechanisms has become a new hotspot. Bai and Sun 11 used a planar four-bar linkage to study the dynamic characteristics of a multi-body system with multi-clearances. Chen et al. 12 studied the dynamic characteristics of a two-degree-of-freedom nine-bar linkage with clearances, and verified the correctness of the dynamic model by ADAMS software. Song et al. 13 proposed a non-smooth strategy for solving a planar rigid body mechanism with multi-clearances based on the variational inequality, and compared the accuracy with the ADAMS software. Li et al. 14 researched the dynamic behaviors of double clearances crank slider system with harmonic drive and flexible linkage, and pointed out that harmonic drive could suppress the output peak better than flexible linkage, but with the increase of clearance size, the suppression effect would decrease. Li et al. 15 investigated the dynamic influence of the rigid-flexible coupling solar panel system considering the clearance, and the research pointed out that the reasonable configuration of the clearance size is an effective way to reduce the contact collision. Wang et al. 16 used an improved nonlinear contact force model to study the dynamic behavior of four-bar linkage with multi-clearances, and discussed the effect of clearance position and number on the dynamic behavior of the system. The multi-body system with multi-clearances presents more complex dynamics and nonlinear dynamic characteristics, and the interaction characteristics and wear effect between multi-clearance to be further studied.
The joint clearances aggravates the wear of multi-body systems. At present, the research on the wear effect of multi-body mechanical with clearances is still insufficient. In the actual contact collision problem, due to the influence of factors such as friction at the clearance joint, clearance size, contact material, and geometric size, it exhibits complex wear behavior. Zhu et al. 17 proposed a nonlinear pressure distribution model that combines dynamic analysis and wear calculation. Taken the crank slider as the research object, the wear behavior of the system under the action of a single clearance was studied. Xu and Han 18 proposed a contact method for the analysis of non-circular clearance revolute joints, studied the obvious non-roundness of the clearance joints caused by non-uniform wear for a long time. This method can be used to effectively analyze the non-circular contact problem. Xiang et al. 19 used on the Archard model, proposed a wear prediction model for the mechanism with clearances, and took the crank-slider system with single clearance as the research object, and studied the influence of clearance size and drive power on the wear phenomenon of joints. Zhao et al.20–22 proposed the wear prediction approach for flexible system with clearances by combining multi-body dynamics with wear prediction process, researched the influence of different flexible positions on the wear phenomenon of joints, pointed out that flexible connecting rods could reduce the impact-collision force of joints, and the wear coefficients under different contact conditions were obtained by using neural network. Wang and Liu 23 studied the wear behavior of five-bar system with clearances, the results showed that the multi-clearance joints produced stronger impact-collision forces, leading to more serious wear behavior, but the existence of flexible rods can reduce this effect. With the development of the dynamic theory of multisystems with clearances, the experimental research on clearance dynamics has also made great progress, such as the crank-slider systems with clearances,24,25 planar 4 bar mechanism, 26 the three-joint locking mechanism in the cabin door, 27 etc. have conducted experimental research, and the experimental results are consistent with the results of the built wear prediction model. In order to reduce the system wear problem caused by the existence of clearance joints, scholars not only studied the wear effect of the system with clearance, but also reduced the wear behavior of the multi-body system by optimizing system design, local flexibility and lubrication.28–30 Research shows that reasonable design of the clearance size, local flexible members, and lubrication can effectively reduce wear.
In summary, the research on the dynamics and wear prediction of multibody mechanism with clearances has achieved fruitful results, but the research on the dynamics and wear failure behavior of multibody mechanism with clearances is still limited. 31 Compared with the single clearance mechanism, the multi-clearance mechanism exhibits more severe impact-collision force during the contact collision process, the wear is more serious, and the mutual coupling effect of the different clearance joints is more obvious. Therefore, it is essential to further research the wear behavior of systems with multi-clearances to understand the wear mechanism between different joint clearances.
To research the dynamics and wear effects of a multi-body system with multi-clearances. The planar four-bar linkage with double clearances is studied, and the system dynamics differential equation with multi-clearances is built using the Lagrange multiplier method. The L-N nonlinear contact force model and LuGre model are used to simulate the contact force and friction in the process of contact collision, respectively, and the multi-clearances wear prediction model is established based on Archard’s equation. The influence of crank speed, clearance position, clearance size and clearance number on the wear depth of multi-clearance system is studied. The coupling effect of different clearance joints is discussed, which resulted in nonlinear wear behavior at different clearance joints.
The main contribution of this paper is to establish a wear prediction model suitable for irregular clearance joints and to propose a quantitative analysis method for irregular wear effect of plane multi-body mechanical with multi-clearances. To explore the wear effect of multi-clearances system and quantitatively analyze the wear mechanism of multi-clearance joint system. Reveal the nonlinear phenomenon existing between the different clearance joints, and prove through the data simulation results that the reasonable design of the clearance size of the different clearances can effectively suppress the wear of joints, and to provide a theoretical basis for inhibiting joint wear caused by clearances.
Mathematical modeling method of rotary clearance joint
To accurately describe the relative motion state of journal and bearing, a mathematical model of regular joint is established based on the collision hinge model, which includes the eccentricity model of journal center, the deformation model during contact collision and the relative motion velocity model. Figure 1 shows model of joint with clearance, which is established in the whole coordinate system

Model of rotary joint with clearance.
Figure 1 shows that, in the generalized coordinate system, the eccentricity vector

where



where

When the contact collision occurs, the bearing and journal will produce different degrees of elastic deformation due to the impact-collision force. The magnitude of deformation can be expressed as

the deformation
Figure 2 shows that when contact collision occurs, the deformation vector


Model of rotary joint with clearance.
where


where

It can be seen from Figure 2 that the tangential vector
The above equation can be used to calculate the velocity of two cylindrical contacting bodies.


When studying the contact collision characteristics at the clearance joint, it is necessary to obtain the relative motion velocity, which is used to calculate the tangential friction at the contact collision point.


Force model of clearance joint
In the contact collision phase, the joint is not only affected by normal impact-collision force, but also by tangential friction force. The choice of impact-collision force model is very important to the establishment of dynamic equation of mechanism with clearance. After the development of recent decades, scholars consider the influence of material properties, geometric shape, roughness of contact surface and elastoplastic deformation on contact force, and deduce numerous contact force models. 32 Most of the existing impact-collision force models are built based on Hertz’s contact hypothesis. To study the energy consumption in the process of contact and collision, scholars assume that the energy consumption comes from the internal damping of the material, and the first Kelvin-Voigt (K-V) contact force model considering the damping term is derived. Therefore, the widely used L-N contact force model is selected.
Normal impact force model
Scholars Lankarani and Nikravesh 33 comprehensively considered the amount of deformation, geometric dimensions and material properties, and introduced the initial deformation velocity into the model to more clearly described the energy consumption and transfer in the process of contact collision. Similar to Hertz model, the L-N impact force model is also derived from point contact theory, and is only suitable for the condition of low impact velocity, coefficient of recovery close to 1, and small contact area relative to the collider.
According to whether the identified deformation

The first part of the formula is the completely elastic contact force, and the second part is damping term to calculate the energy dissipation, when contact and collision. The stiffness coefficient


where

where

Tangential friction model
The friction effect is very important phenomena in the clearance dynamics problem. 34 The classic Coulomb friction law is simple to use, but when the relative tangential velocity of the two contact bodies is 0, the friction force will change suddenly, which poses challenges to the numerical solution, and the model does not consider the viscous sliding phenomenon in the friction process. 35 The modified Coulomb’s law can guarantee the stability of the algorithm when the tangential velocity is 0. Therefore, the modified Coulomb’s law is widely used in the dynamic analysis of multi-body systems with clearance. However, the modified Coulomb’s law cannot simulate the viscous sliding phenomenon.
Therefore, the LuGre model is calculated the friction force in the process of contact and collision. The LuGre friction model can easily reflect the change of friction force with slip velocity. It is not only suitable for studying the phenomenon of viscous sliding, but also can be used to study the Stribeck effect in the friction process. The model can be defined as the product of the instantaneous friction coefficient and the impact-collision force, which can be written as

where

where
The differential expression of the state variable

where

Dynamic modeling of mechanism with multi-clearances
The four-bar mechanism with multi-clearances, such as Figure 3, is chosen as an example to demonstrate the methodologies presented. The mechanism consists of crank 1, coupler 2, follower 3, and ground 4, the lengths are
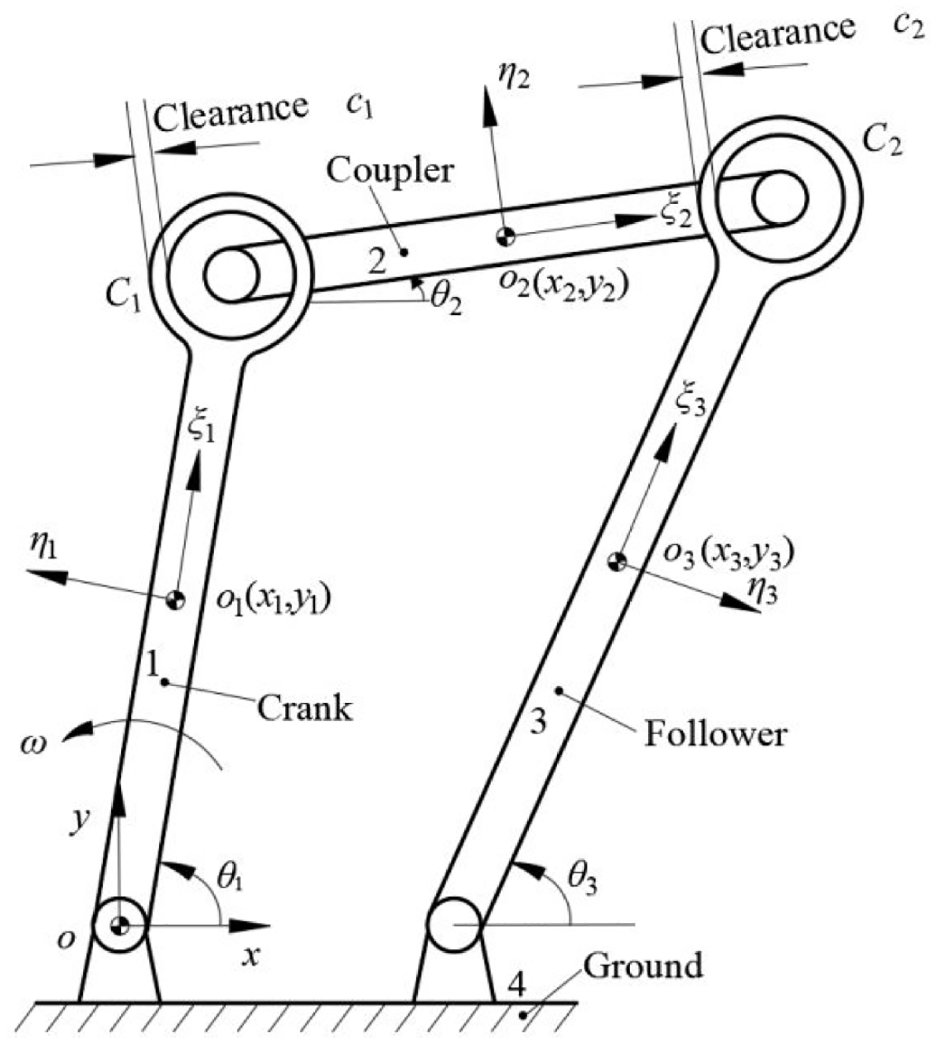
Schematic diagram of four-bar linkage with multiple clearance joints.
Geometric parameters of four-bar linkage.

The existence of clearance joints increases freedom degree and makes the kinematic characteristics of the mechanism more complex. The generalized coordinates of the system are

The mechanism with clearance joint is a typical variable topological system, and the dynamic equations under different motion states are different. Therefore, the dynamic model is established by using the idea of dynamic piecewise modeling. If there is no contact and collision at the clearance joints, that is, the state of free movement, there is no impact-collision force at joint, the journal moves freely in the bearing depending on the inertial force. Therefore, the dynamic equation and the complete constraint equation of the mechanism is expressed as

where
The constraint equation and Jacobian matrix of the system is given as follows


where
According to the constraint equation, the expression of vector

The diagonal matrix of inertia and mass of the four-bar mechanism system can be expressed as

where
The generalized force vector of the system can be expressed as

where
In the contact and collision phase, the contact deformation of two contact bodies results in the interaction of impact-collision force, which results in a strong nonlinear response of the system. At this point, the dynamic equation of the mechanism is expressed as.

where
Modeling process of wear prediction of rotary joint
The wear behavior is another important feature of contact impact problem. There are more than 300 methods for the study of wear and friction phenomena. 36 In the dynamics of multibody systems with clearances, the wear prediction model is mainly established by using Archard’s equation. 37 This model links the wear with physical properties such as material hardness, impact load and sliding distance of the contact colliding body. The expression can be written as

where
In practical engineering, more consideration is given to the size of the wear depth during contact. Equation (32) is divided by the contact area to obtain the wear depth expression (34).


where
In fact, in the study of contact and collision problems, the wear behavior is usually regarded as a dynamic process. Therefore, the wear rate in equation (34) can be converted into a differential form.

For the wear of joint, the wear depth of

where
It can be seen from equation (36) that the solution of sliding distance



Diagram of wear profile at clearance joint.
where
The contact area is defined as

where
Assuming that the wear depth of the journal is consistent with that of the bearing, the worn journal and bearing radius can be expressed as



Where
The key of dynamic simulation is embedded the wear prediction model into the dynamic equation of system. The wear behavior of multi-clearances system involves complex calculation, it is necessary to use a reasonable calculation strategy. Figure 5 shows the algorithm flow chart of wear prediction modeling for the multi-clearance joint system, and describes the main calculation steps and dynamic equations.

Flowchart of the algorithm for wear prediction modeling in a multiple clearance joint system.
Simulation results and discussion
Numerical simulation is used to research the characteristics of wear effect in the four-bar linkage system with multi-clearances. The simulation parameters are shown in Table 2.35,38 The influence of different crank speed, clearance size, and clearance position on the wear characteristics are emphatically investigated, and the nonlinear wear phenomenon between different clearance joints is explored.
Dynamic simulation parameters of four-bar mechanism.

Influence of clearances number on the depthof wear
To study the effect of clearances number on wear depth, it is analyzed in three cases: (1) only a clearance at

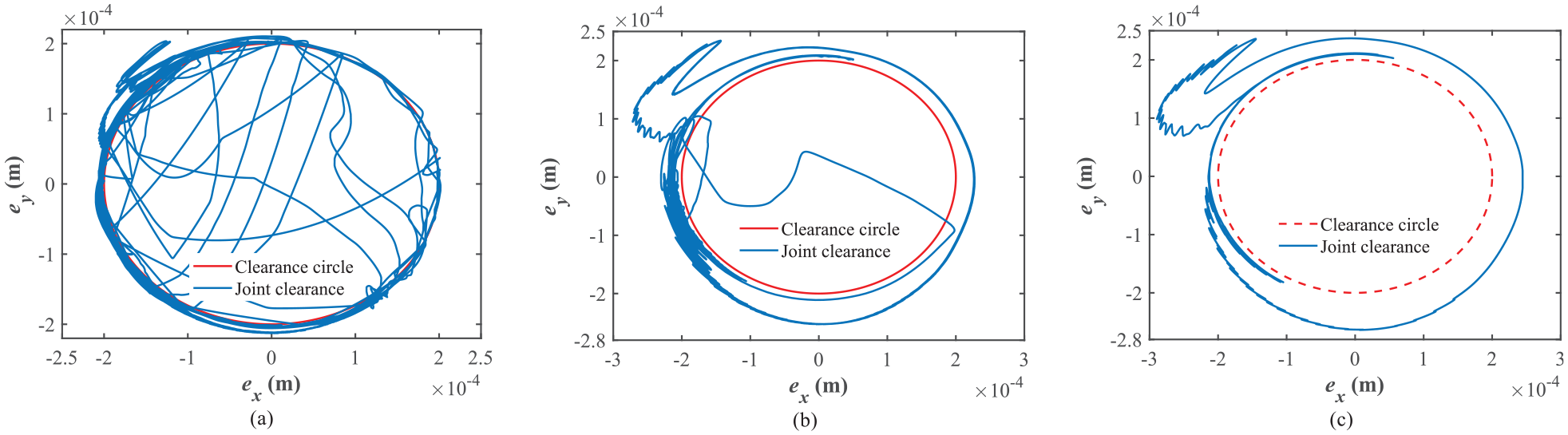
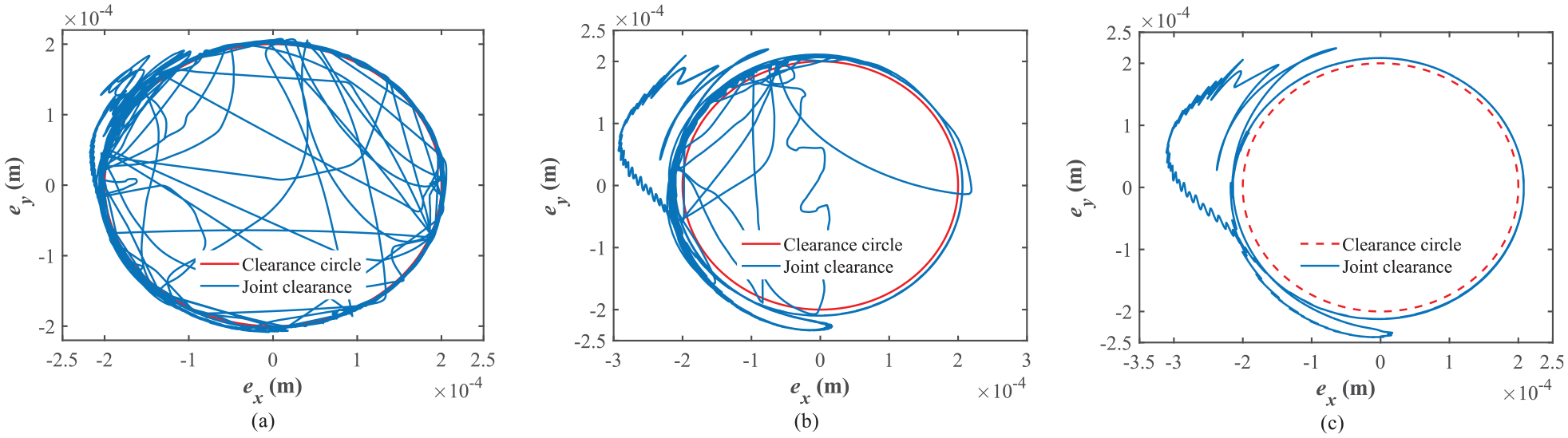
Motion trajectories of journal center: (a) at clearance joint

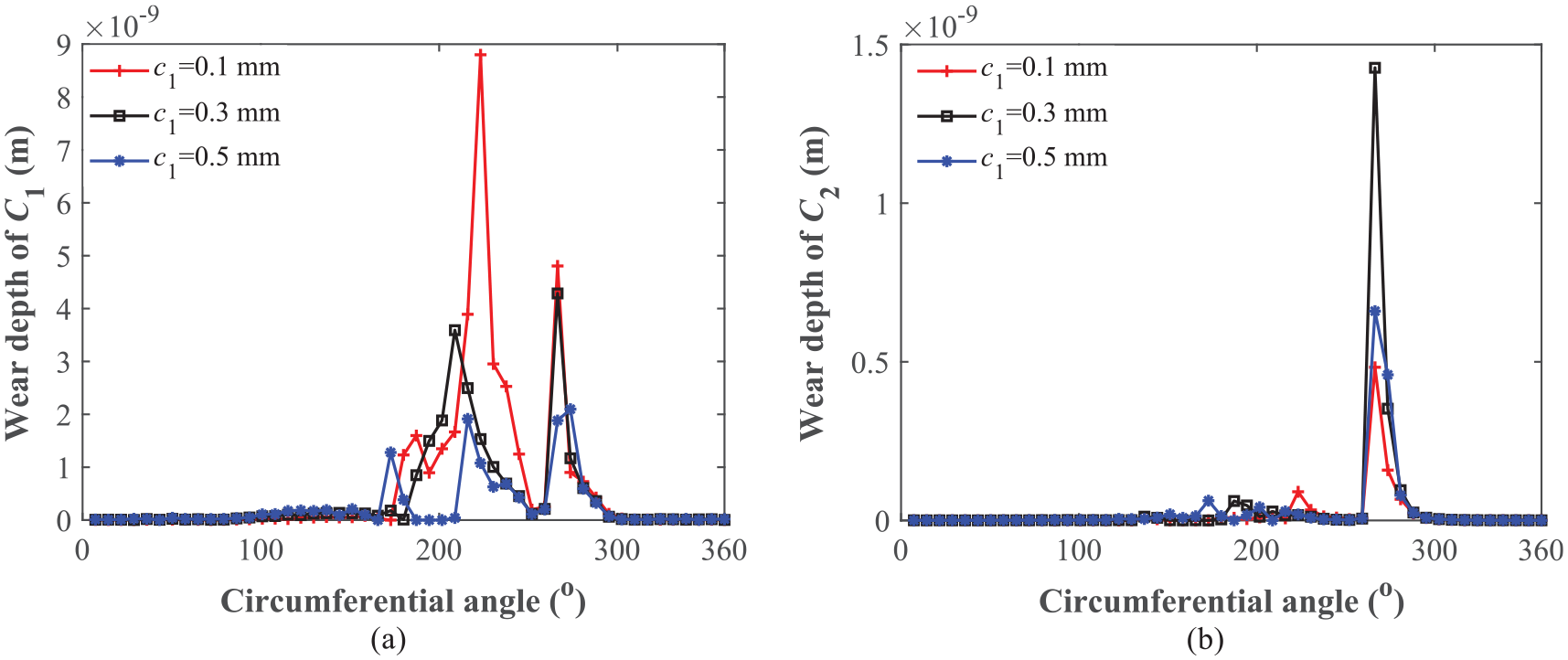
Wear depth at clearance joint: (a) wear depth of
Figure 6 shows that in the four-bar mechanism, the increase in the number of clearances aggravates the contact deformation of the joints. In Figure 6(a), the joint position of the same clearance is affected by the number of clearances, and the motion trajectories of the journal center changes significantly, and the position where the maximum deformation occurs and the deformation area are significantly different. In Figure 6(b), the joint
Affected by the number of clearances, the wear depth of joints with the same clearance also changes. As shown in Figure 7(a), the change in the number of clearances has no obvious influence on the wear depth of
The influence of crank speed on the depth of wear
To study the effect of crank speed on the wear depth of
Figures 8 and 9 show the movement trajectory of the journal center. It is observed from the figure that the deformation at clearance joint
Motion trajectories of journal center of clearance joint
Motion trajectories of journal center of clearance joint
By comparing Figures 8 and 9, it can be observed that the amount of deformation of
Figure 10 shows that the depth of wear with different crank speeds. Figure 10(a) and (b) show that in the same position, the depth of wear increases with the increase of rotational speed, which is indicated that rotational speed is one of the important factors affecting joint wear. However, the wear depth of

Wear depth of clearance joint
Influence of clearance size on the depth of wear
The crank speed is set at 20π rad/s,
Influence of
on the depth of wear
To explore the effect of clearance size of
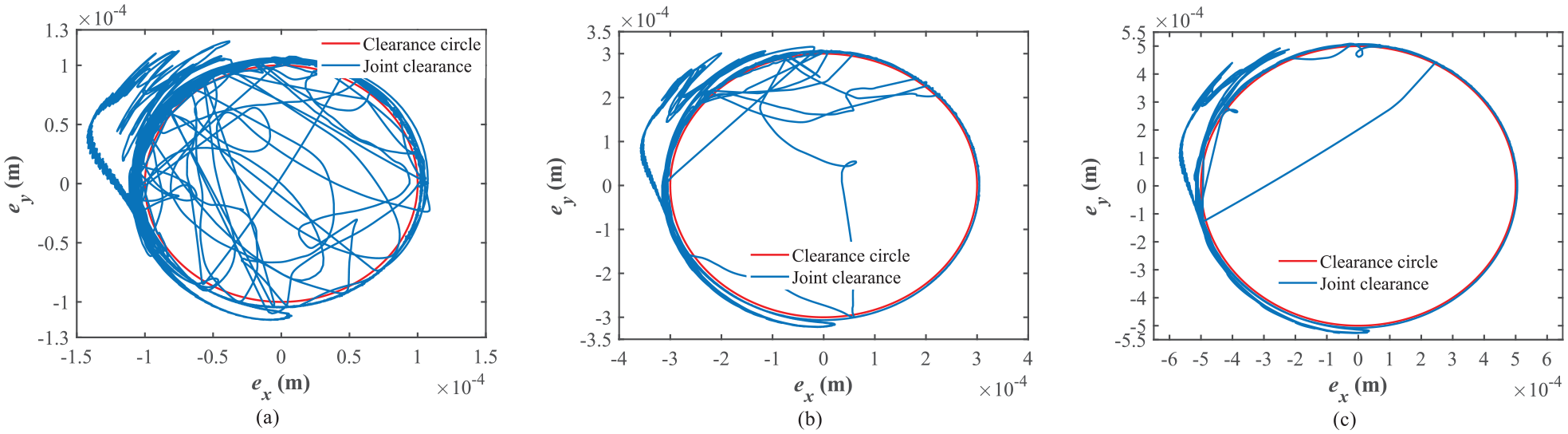
Figures 11 and 12 respectively show the movement track of the journal center of

Motion trajectories of journal center of

Motion trajectories of journal center of
Wear depth of
Figure 11 shows that the increase of clearance size
Figure 13(a) shows that the increase of
Influence of
on the depth of wear
In the same way, the
Figures 14 and 15 are the motion trajectories of journal center with different clearance size. Figure 14 shows that the increase of

Motion trajectories of journal of
Motion trajectories of journal of

Wear depth of
Figure 15(c) shows that when the
Coupling interaction analysis between
and
Due to the influence of crank speed and clearance size, the wear depth of
Figure 17 shoes that the wear depth of

Wear depth of
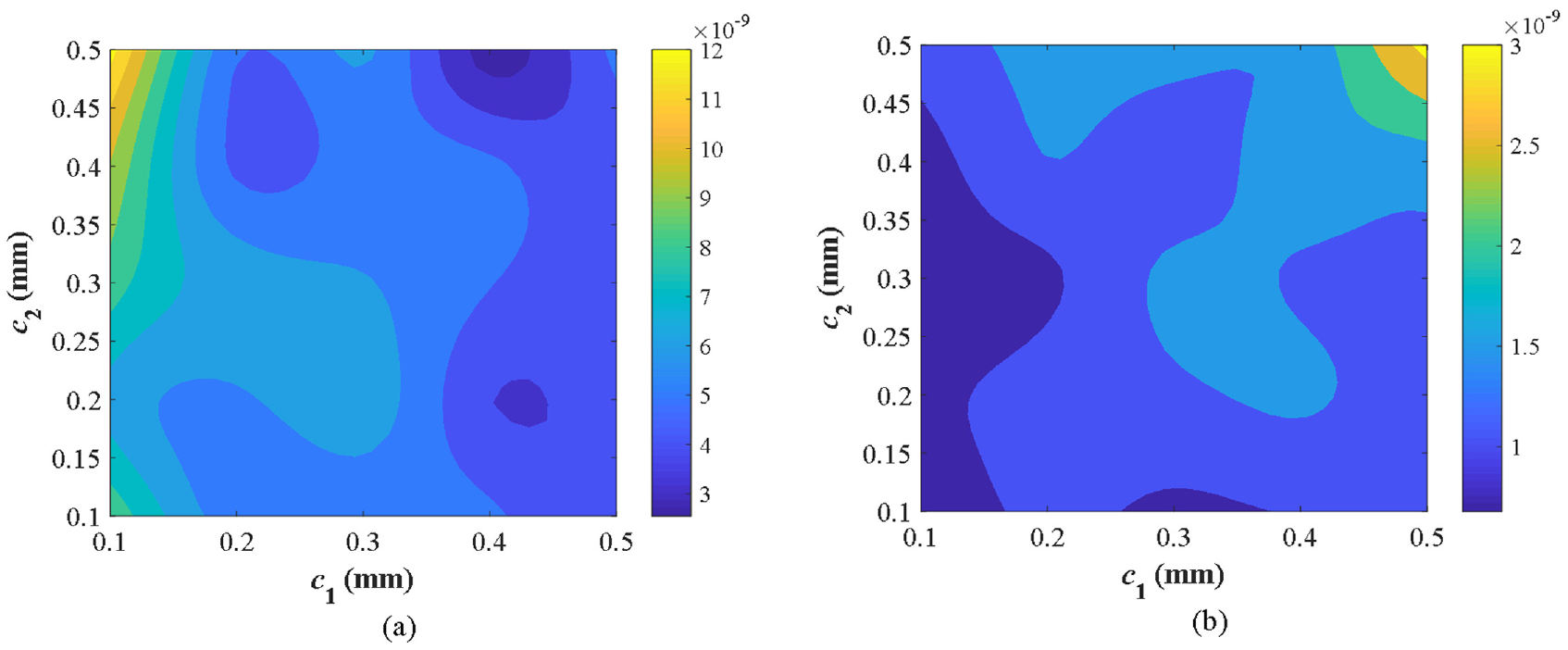
Wear depth of
As is shown in Figures 17(b) and 18(b), the wear depth of
It is found through research that in the mechanism system with multi-clearances, the wear depth of different clearances has a strong nonlinear phenomenon due to the influence of clearance size and clearance position. Therefore, in the design and manufacturing process of multibody system, to reduce the wear damage caused by clearances, it is necessary to reasonably design the clearance values at different joints.
For the four-bar linkages, the clearance sizes of
Conclusions
To investigate the problem of irregular wear leading to the failure of multi-body systems with clearances, this paper takes the planar four-bar linkages with multi-clearances as the object of study, and studies the mechanism of crank speed, clearance number, clearance position, and clearance size on the wear effect of multi-clearance system. The following conclusions are drawn
A quantitative analysis method for irregular wear effect of plane multi-body system with multi-clearances is proposed, which effectively solved the problem of irregular joints wear prediction of multi-clearance system. The results show that the higher the rotation speed, the more serious the wear and the greater the impact-collision force. The influence of crank speed, clearance number, clearance position and clearance size on the wear effect presents obvious nonlinear characteristics. Moreover, this analysis method is applicable to planar mechanisms with more than two clearance joints.
The iterative wear prediction process based on Archard’s equation was used to calculate the wear characteristics, and a dynamic irregular wear model considering multi-clearance joints was established. An analytical method for quantifying irregular wear clearances is proposed to analyze the wear characteristics of joints with different clearances. which could provide theoretical support for joint contour reconstruction after wear.
For the first time, the wear characteristics of different clearances under different clearance sizes were analyzed, and the reasonable design interval of the clearance value when the clearance wear is minimal was given. It is found that there are strong nonlinear wear characteristics between different clearances, which provides theoretical support for the design of clearances mechanism.
Therefore, by studying the wear mechanism of multi-body system with multi-clearances, appropriate design of different joint clearance sizes is an effective way to reduce the wear failure of multi-body system. In addition, a real prototype will be established based on the subsequent optimal design results and relevant experiment will be conducted to validate further the mechanism of wear effect in future.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to acknowledge foundation item: Innovative Research Team in University of Tianjin (No. TD13-5037), Natural Science Foundation of China (No. 51475330, No. 52005368, and No. 52175243), and Postgraduate Innovation Project of Tianjin (No. 2020YJSB064) for supporting the research.