
Abstract
This paper presents an investigation into the locally centralized conflict resolution problem of unmanned aerial vehicles (UAVs), in which the headings are adjustable variables. Firstly, the geometric characteristics of the conflict resolution problem in two-dimensional space are studied, and the problem is reduced into a nonlinear programing model. Secondly, the nonlinear safe separation constraint is transferred into linear style in the sine value space using the space mapping method. The feasible region of two conflict-related UAVs is transformed into a half-space in the sine value space. The minimum adjustment vector and the maximum adjustable vector are obtained in this space. Thirdly, to search for the local optimal conflict-free solution, a two-layered optimization method is given. In the first layer, feasible conflict-free solutions are obtained by iterative search in virtue of the minimum adjustment vector and the maximum adjustable vector. In the second layer, the local optimal solution is generated using the sequential quadratic programing (SQP) method. The effectiveness of the proposed method is verified by numerical simulations. Compared with the existing geometric guidance theory based methods, the proposed method could effectively generate conflict-free solutions that lead to fewer detours, through which UAVs could coordinate online in highly crowded airspace.
Introduction
UAVs have broad application prospects in some civil fields, for example, traffic monitoring, pipeline detection, cargo transportation, and sometimes transport people in the city. 1 Many UAV applications are predicted to be concentrated in densely populated metropolises. 2 The primary concern is to ensure air safety when UAVs access into urban low-altitude airspace. 3 The Air Traffic Management (ATM) unit should provide the capability of Conflict Detection and Resolution (CDR) for UAVs. The conflict detection is to foresee potential loss separation dangers, and the conflict resolution unit is to determine conflict-free maneuvers. 4
The objective of CDR is to optimize the flights of UAVs while keeping the safe separation among relevant UAVs in a time interval
Some reliable techniques, such as long-range wide area network (LoRa) 11 and 4/5G technology could provide the reliable communication among UAVs in the low-altitude airsapce.12,13 When UAVs are permitted to fly close to each other, they could share their states and even short term flight attentions via these devices. Therefore, the local cooperative conflict resolution becomes realizable. 14
Rich researches have been published by the researchers in the short-term CDR field. The online short-term conflict resolution methods could be categorized into several types based on the resolving methodology. 15 The trajectories optimization methods tend to find the optimal solutions by once or a series of maneuvers. 9 Soler et al. 16 model the conflict resolution problem as a hybrid optimal control problem (OCP), and propose to solve this problem as a Nonlinear Optimization Program (NLP) problem. Omer 17 proposes three different mixed integer linear program (MILP) based conflict resolution methods, and the velocity and heading change avenues are separately studied. Furthermore, Liu 18 studies on the continuous air traffic centralized coordination problem. The objective is to coordinate UAVs that close to each other to reach their destinations and maintain the safe separation among them. This problem is formulated as a nonlinear nonconvex optimization model and is kept on solving by receding-horizon progressive heuristic method. By combing the memetic algorithm and the genetic algorithm, Guan et al. 19 propose the strategic conflict avoidance framework. The sampling based search methods are to search the solutions that could guarantee the proper safe separation among aerial vehicles. 20 The tree search-based algorithm explores the states space and action space by combing the heuristic function and the dynamic model of the conflict-involved UAVs. 21 These methods perform well in the scenarios where there are only a limited number of conflict-involved UAVs in the local airspace. As the number of conflict-involved UAVs increases, the computation time will increase exponentially. There are other types of CD&R methods that could extend to deal with congested airspace conflict scenarios. The potential field methods define attractive potential at the target and a repulsive potential around the invaders, such that the vehicle follows the gradient of potentials to yield the path which is attracted by the target and keep the safe separation with static and dynamic hazards during vehicle navigation. 22 Rahmani et al. 23 present a deconfliction algorithm for the multi-vehicle system by constructing an appropriate navigation function, which is actually one type of the improved potential field method. Roelofsen et al. 24 propose a navigation function-based CDR method for quadrotors with considering the limited sense field. This method is proved to be able to guarantee the collision free among quadrotors by define proper navigation function. These types of methods are collectively called the reactive methods. The shortcoming is this type of methods considers more on keeping safe separation between UAVs than their assigned tasks.
More and more UAVs would fly close to each other as the applications of UAVs become popular in many fields.
18
In this circumstance, the conflict resolution method should guarantee UAVs to make minor detours to keep safe separation.
25
This paper focuses on the heading change-based short-term CDR of UAVs by using the locally centralized coordination method.15,17 The geometric guidance algorithms combine the reactive algorithm and optimization planning method together appropriately, and they are agile and efficient to produce short-term conflict-free maneuvers.10,26 Alonso-Mora et al.
27
propose cooperative collision avoidance algorithms for quadrotors based on the velocity obstacle theory. Their algorithm is proved to be efficient in generating suboptimal solutions. However, according to the velocity obstacle theory, the conflict-related UAVs could become overly close after the look-ahead time interval
According to the discussion above, this paper studies the geometric guidance-based conflict resolution method. The conflict-free constraint is derived from the collision cone model. 32 The problem is reduced to nonlinear programing (NP) problem. We propose a two-layered optimization method in virtue of the space mapping method and the nonlinear optimization algorithm, which is to search the feasible solution in virtue of the iterative space mapping method in the first layer and to generate the optimal solution in virtue of the optimization solver in the second layer. To satisfy the online planning requirement, the flight rules are referenced in searching the local optimal policies. The advantage of this method is that the required degree modifications of relevant UAVs could be obtained directly. Therefore, the centralized coordinator could determine the search direction unambiguously. The existing method is used to compare with this method so that the performance of this approach is demonstrated. In various situations, this method could obtain well-optimized solutions.
The rest of this paper is organized as follows. Section II details the online conflict resolution of UAVs. Section III introduces the conflict resolution method based on space mapping. In Section IV, we use several illustrating numerical simulations to prove that this method is effective. Section V gives the conclusion.
Problem formulation
UAVs kinematics
There would be various types of UAVs flying in the airspace. We assume that a group of UAVs would fly close to each other now and then in the local airspace, and they may involve in airspace conflict because of unexpected incidents or bad weather conditions. We anticipate that there are centralized air traffic control units that coordinate UAVs to fly close to their nominal paths and maintain their safe separation. 18 The particular problem we study is conflict resolution of UAVs with planar and deterministic motions.
In the horizontal flat two-dimensional space, UAV Ai,

where

where

where the max roll angle is
A potential collision danger could be resolved by heading change, altitude change,
33
or speed change.
34
When flying at low-altitude airspace in the urban area, it is more practical for the fixed wing UAV to adopt the horizontal heading maneuver strategies to avoid conflict, because the speed adjustment may destabilize the aircraft, and the altitude adjustment may cause the aircraft to leave the low altitude airspace and enter the medium-altitude airspace that the 4/5G communication could not reach.
35
In this paper, one UAV Ai would be designed with horizontal heading maneuver strategies to keep the safe separation with its neighbors.
5
That is
In order to ensure the safety of aircraft in flight, we define the safe area of each UAV Ai according to its characteristics and platform features (e.g. mobile performance and size). The safe area is defined as

where
We aim to find the heading change policies
We assume that the tracking systems mounted on UAVs are able to track planned heading maneuver policies within the allowable error range.
36
In the online planning process, we approximate the modified trace by using dubins curves.
5
Such as shown in Figure 1, to minimize the error, we assume that UAVs would take the maximum angular rates to reach the planned heading direction. Based on the dubins method, we devise to use the curve-curve (“CC”) maneuver method to track the planned heading maneuvers in the shortest time. The path tracking process is departed into two processes: to turn to the required direction with the maximum rate in the first process and to modify the heading direction with maximum inverse angular rate. We could obtain the maximum reachable turning angular by

UAV tracks the planned path. UAV’s mobility limits its maximum maneuver heading degree.
In the heading modification process, the distance between the initial point and endpoint is less than the production of initial velocity and

The error
Safe separation constraint
We firstly discuss the pairwise UAVs safe separation condition. The pairwise safe separation constraint is expressed as equation (6):

where
The spatial relationship between UAVs is analyzed by local coordinates. In Figure 3, the position of Aj at t = 0 is set as the original point of the local coordinates frame. The coordinate of Ai in the local coordinates frame at time t = 0 are:

Suppose that Ai and Aj take heading maneuvers

The velocity of Aj relative to Ai is:

To keep the safe separation between Ai and Aj,
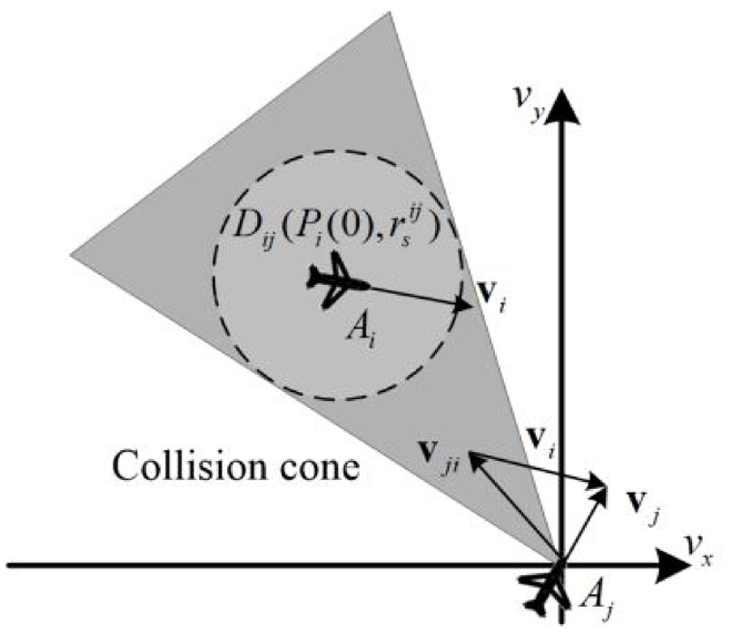
The collision cone based safe separation constraint.
The constraint (6) is transferred as:

where

According to the geometric safe separation constraint, with consideration on the dynamic constraint of UAVs, we find that there are three types of situations between two nearby UAVs in


Geometric construction for conflict avoidance constraint: (a) practical conflict, (b) potential conflict, and (c) no conflict.
Multi-UAV conflict resolution problem
In the short-term conflict resolution problem, the value of
Different types of UAVs have different tasks and priorities. In addition to that, the air traffic situation is varying. In the congested environment, the conflict resolution strategy should be carefully designed. Two variables are defined, namely

where
Objective function
A successful conflict resolution policy of UAVs should ensure the safe separation among them, with respect to their performance limitations, and accommodate to other desirable behaviors or objectives simultaneously. We regard the safe separation requirements and performance limitations as hard constraints, and the other desirable behaviors are expressed in the objective function.
The primary concern of the objective function is to evaluate the cost of heading maneuvers. The cost includes fuel consumption and the influences on the tasks of UAVs. According to the conflict resolution criterion, UAVs would return to their nominal flight paths after conflicts are resolved. The additional fuel consumption is closely related to the departure distance between current positions and the nominal paths.
On the other hand, we find that the main correlative factor of the tasks performances of UAVs is the deviation distances and durations from the preference traces. Therefore, the main discussion on this problem is to eliminate the deviation distance and to ensure UAVs to return to their nominal flight paths of UAVs.

where
Local centralized conflict resolution problem
As UAVs are grouped into sub clusters based on the conflict relationships between each pair of UAVs, the conflict relationships of UAVs in one sub cluster should be comprehensively considered in case the conflict resolution maneuvers lead to serious secondary conflicts.
38
Supposing that

Therefore, we model the multi-UAV conflict resolution problem as a nonlinear programing (NP) model.
The space mapping based conflict resolution algorithms
We find that the objective function and the safe separation constraints of the nonlinear programing model defined by equations (15) and (16) are non-convex. 5 Furthermore, according to the dynamics of UAVs, the feasible range of each pairwise conflict-related UAVs consist of several sub regions. 5 We should search over these disconnect sub regions to obtain the optimal solutions. It is inefficient and impractical in the online conflict resolution scenario. In practice, it is even challenging to find the local optimal solutions efficiently when many UAVs are congested in the local airspace. To improve the computation efficiency, this paper proposes to search the solution in virtue of the space mapping method.
The heading change based maneuver constraint
According to the discussion in Section II, we define the equation (17):

The roots of (52) are:

where

The feasible region of heading direction of relative displacement. There are two different sub regions because the sign of the denominator of k is contrary in region 1 and region 2.
According to the algebraic calculus, the feasible region is determined as.

We then find the constraint on the control variable based on the constraint on
The slope of

In metropolis airspace, some homogeneous UAVs may fly at almost the same airspeed. The nonlinear constraint can be transformed into linear constraint. 26 However, in most cases, the conflict involved UAVs are homogeneous and with different airspeeds. Therefore, the safe separation constraint could not be transformed into linear constraint directly in the original position-degree space.
The equation (20) could be transferred as below:

where
We define the function:

The sign of
Case (1) the sign of

or

Case (2) the sign of

or

Space mapping from degree space to sine value space
In equations (23)–(26) define the conflict-free regions of Ai and Aj. However, as these constraints contain sin function, each feasible region is not convex. To simplify the searching process, we propose to change the nonlinear relationship into a linear relationship.
The space mapping relations are defined as the equation (27):

The values of
(1). If

(2). If

The sine value space is defined in a 2-D rectangular coordinate system. The X axis describes the value of
We make further discussion on how to obtain feasible solutions in sine value space in virtue of these linear constraints. As shown in Figure 5, the gray region is defined as:

Mapping coordinates for heading change based conflict resolution: (a) mapping coordinates for practical conflict and (b) mapping coordinates for potential conflict.
Suppose the feasible region is constrained by
As shown in Figure 5(a).
Two potential conflict-involved UAVs should also satisfy constraints (28) or (29). As shown in Figure 3(b), the potential conflict incurs two kinds of constraints. On one hand, to keep the safe separation,
The type of constraints that is deduced by
If the modification vector
The space mapping based conflict-free local optimal solutions search algorithm
According to the discussion above, we realize that the multi-UAV conflict resolution model defined in (15) and (16) is a MINP model. As the safe separation constraints are non-convex, there is no efficient solver that meets the online computation requirement. According to the discussion in section III B, we propose to search the local optimal solution based on the features of the problem.
There are lots of efficient non-linear solvers. These solvers need to start from feasible initial solutions. Therefore, the main challenge for the problem defined in (15) and (16) is to generate feasible initial solutions efficiently. We propose to find the initial feasible solution in virtue of the space mapping-based iterative searching algorithm.
When the middle-air conflict is a pairwise conflict, the feasible solution could be easily generated as Ai and Aj only need to modify their headings so that the mapping value in the sine value space satisfies that
When the number of conflict-involved UAVs is more than two, the safe separation constraints among UAVs become highly coupled, the feasible maneuver policies could not be generated directly from minimum adjustment vectors. The information of
The value of
We propose to find out the feasible solutions by iterative searching, as shown in Figure 6. The vectors

The iterated feasible solution search algorithm.

The feasible solution searching process in the
In the mth iteration, the local centralized coordinator computes the set of the minimum adjustment vectors
If there is no less than one UAV Ai, of which the units of

where
If there is not one UAV, of which the required modifications are all positive or negative, the coordinator would generate the modifications for each UAV:

where
If the maximum absolute value of
Supposing that the overall iteration number is

By using the iteration algorithm, the coordinator could generate feasible solutions under a group of constraints if there are feasible solutions. 31 The algorithm is shown in Figure 6, and the searching process is depicted in Figure 7.
After feasible solutions are generated, the local optimal solutions could be obtained by using existing efficient solvers.
As we discussed above, the feasible regions for each pairwise conflict are departed as two regions. In the multi-UAV conflict resolution problem, the algorithm would search
The rotations of all UAVs to one side often show good results in both centralized and decentralized methods. Referring to manned flight regulations, the solver prefers to search the local optimal solution so that all UAVs make right/left turns when the amount of conflict-involved UAVs is large.27,39
Computational experiments
The proposed approach is tested in numerical simulations. Our approach is implemented in MATLAB on a 2.5 GHz Intel i5 quad core processor with 12 GB memory running the Windows 10 operating system. As we discussed above, we focus on the conflict resolution problem in the 2-D space. Therefore, the simulation limits both the conflicts and motions of UAVs on the 2-D planar plane. The speeds of UAVs are in the range (40, 60 m/s). The speeds of UAVs keep constant while they take heading maneuvers. The alert distance is set to be 2.5 km with consideration given to the speeds of UAVs. The safe separation radius of
In the first scenario, we demonstrate our algorithm in the roundabout scenario. In this scenario, all the UAVs would reach the center position simultaneously, which makes the conflict unique and intense. Each UAV would have to consider its neighbors equally at the same time, and this scenario could be used to demonstrate the performances of algorithms in minimizing the influence on the air traffic. 28
To demonstrate our method, our method, and the MILP model in Yang et al.
31
are used to cope with the UAVs’ roundabout conflict scenarios with the same condition. The initial states of UAVs are recorded in Table 1. The value of

The initial states of UAVs in roundabout scenario.
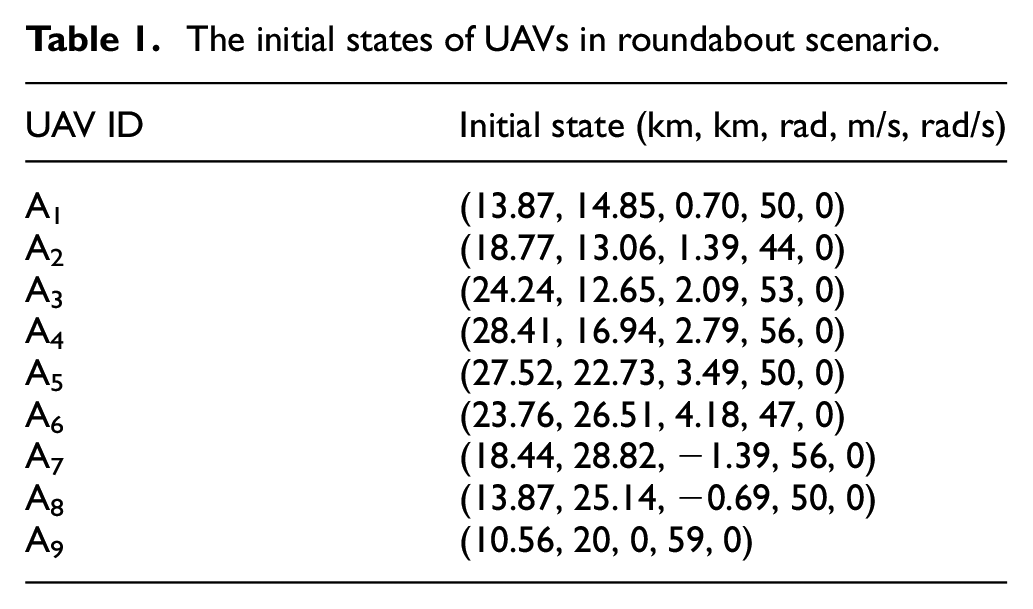
Figure 8 shows the summation of the distances between real positions of UAVs after conflict resolution and their planned positions. It shows explicitly that the iterative optimization method would lead to fewer additional flight distances than the MILP based method.

Distance between real positions and the planned positions of UAVs.
Figure 9 shows the online planned flight paths of the conflict-related UAVs. As shown in Figure 9, all these UAVs would take right turns cooperatively to avoid each other. We could recognize that UAVs are assigned with small heading modifications during the flight, and UAVs return to the nominal paths after they go through the conflict region. Both these two algorithms could generate smooth flight paths. From a finer viewpoint, we find that the MILP method generates much larger detours for UAVs, such as UAV A1 and A2. The reason is that there is not an online coordination mechanism to modify the maneuver responsibilities between UAVs based on their situations. We find that by using our method, UAVs would take different heading maneuver ranges, which is different from the MILP model.
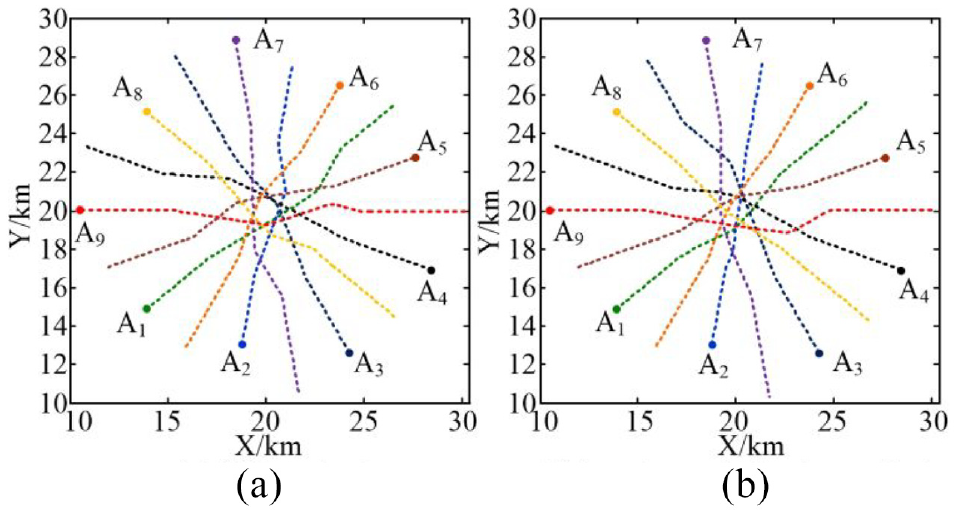
The conflict-free flight paths of UAVs: (a) MILP method and (b) iterative optimization method.
According to the simulation, the iterative method would take about 0.1 s to generate a local optimal solution for 9 UAVs roundabout scenario, and the MILP method would take about 0.07 s to generate a near-optimal solution. The result shows that our method would take much more time to generate conflict-free solutions. However, as we set the alert distance as 2.5 km and the speeds of UAVs are in the range (40, 60 m/s), the local coordinator would foresee the conflict dangers before 40–50 s. Therefore, the computation efficiency meets the online planning requirements. We would analyze the reason that the MILP leads to more additional distance. The MILP built in Athanasiadou et al. 35 is based on the linearization method. According to the linearization method, the conflict avoidance requirement of each pairwise conflict is decoupled into fixed responsibilities of two UAVs. As shown in Figure 10, the original feasible regions are the blue triangles. However, using the linearization method, the feasible regions of Ai and Aj are the green rectangles.
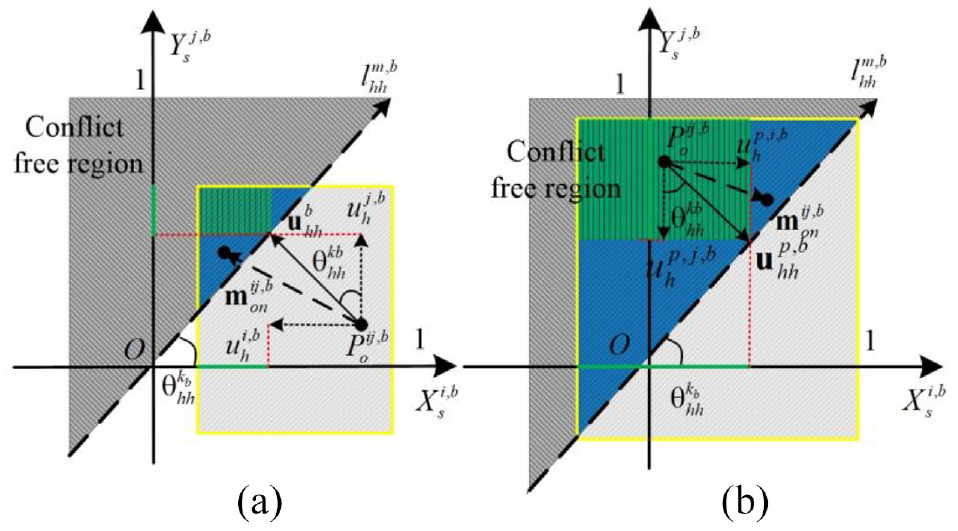
The comparison between MILP and our method: (a) mapping coordinates for practical conflict and (b) mapping coordinates for potential conflict.
On the contrary, in our approach, the space mapping method is used to determine the directions that could alleviate the conflict dangers in each iterative searching process. Therefore, the feasible regions of pairwise conflict-involved UAVs are the whole blue rectangles as shown in Figure 10.
According to the MILP method, the feasible region of each pairwise conflict is obviously reduced. As a consequence, when the number of conflict-involved UAVs increases, the original feasible regions of each UAV would be smaller because of multiple conflict resolution constraints. In this situation, according to the linearization method, there may be no feasible region for some UAVs. Therefore, the MILP method will have the difficulty to generate feasible solutions when the number of conflict-involved UAVs is large even though there exist feasible solutions. On the contrary, our approach would find feasible solutions by using the iteratively updated
Table 2 records the initial states of 20 UAVs which will converge to the position (20, 20 km). Take the conflict resolution problem of these 20 UAVs as an example. Since the velocities and initial positions of conflict involved UAVs are different, the maneuverable ranges of these UAVs would be different. In addition, as there are many UAVs in the local environment, the maneuverable ranges of some UAVs are limited. Therefore, this complex conflict scenario could not be resolved using the MILP algorithm. In contrast, our method could generate conflict free solutions by iteratively searching the feasible solutions in the whole feasible regions. The conflict free flight paths that are generated using our method are shown as Figure 11. It can be demonstrated that our method is more agile and efficient in generating the conflict free solutions for increased number of UAVs.
The initial states of UAVs in roundabout scenario.

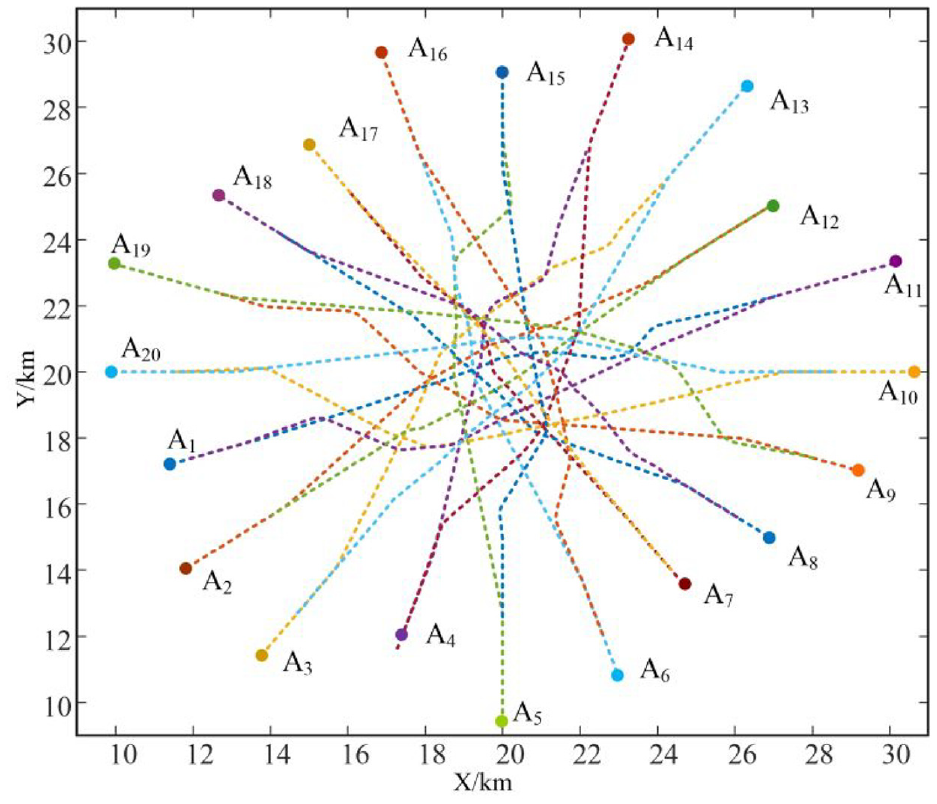
The conflict free flight paths of 20 UAVs that are generated by using our algorithm.
In the second scenario, we demonstrate our algorithm in a general situation. The second example demonstrates that our algorithm can handle the typical CDR problem in air traffic management. Suppose there are eight UAVs in the local environment and their initial states are recorded in Table 3. As the initial positions of UAVs are close, our method faces the challenge to coordinate related UAVs more elaborately to find feasible solutions. To guarantee to find the feasible solutions in the congested environment, the value of
Initial states of multiple UAVs.


The conflict resolution results of multi-UAVs congested environment.
Figure 9 shows our method could generate conflict-free solutions that assure UAVs take minor detours. According to our method, UAVs would go through the central area without abrupt maneuvers.
Figure 13 shows the minimum distances of each UAV with its neighbors in the time period (1, 150 s). The safe radii of UAVs are different as they are defined correlated with their velocities. In Figure 13, the safe radius of each UAV is depicted by the same type of lines as the corresponding minimum distance curve but finer. According to the figure, we find that the initial distances between UAVs are rather small considering the defined safe radii. UAVs are rather close to each other in this time period. However, our method could coordinate the flight paths of related UAVs to keep safe separation.

The minimum distance of each UAV with other UAVs during the flight. The conflict resolution method is the local centralized optimization method.
Furthermore, we demonstrate the proposed algorithm by using the Monte Carlo method. In this scenario, the initial positions of UAVs are randomly generated. We set these UAVs would randomly go through the central region. Therefore, they would meet with airspace conflicts during their flights. Figure 14 shows the randomly generated scenario that 20 UAVs flying in the local airspace, and the proposed algorithm is used to deal with the conflict situation in the scenario.

The 20 UAVs randomly go through the central region scenario.
We generate many random instances for each specific number of UAVs in the range (8, 20). As there are tracking errors in the Dubins curve-based flight trace tracking method, we define that two UAVs keep the safe separations when the distances between them are larger than 0.95

where
Furthermore, we have studied the capability of the proposed approach for alleviating serious loss separation dangers (the serious loss separation danger is defined as the distance between two UAVs is below 0.5

where
The conflict resolution rates of the proposed algorithm.

As the number of UAVs in the local airspace increase, the airspace conflicts among UAVs would become more intense. Meanwhile, the conflict avoidance maneuvers of UAVs would lead to more subsequent conflicts. As a consequence, there would be some unresolvable situations in the dense environment. As shown in Table 4, the value of
Conclusion
When UAVs are permitted to fly in the non-segregated airspace, there would be occasions that many UAVs are congested in the local airspace. The geometric guidance-based conflict resolution approach have great potential in dealing with serious conflict resolution problems. The existing related researches are either computational inefficiency or may lead to redundant flight paths. This paper presents a two-layered geometric-based optimization model. The space mapping method is applied to find the minimum adjustment vectors and the maximum adjustable vectors from nonlinear safe separation constraints in the sine value space. These vectors could be used to indicate the search directions that could alleviate the conflict hazards. The iterative algorithm is proposed to search conflict-free initial solutions. It is time-consuming to search the global optimal solution for many UAVs with related conflicts because the feasible region of each pair of conflicts is divided into many sub regions. Since the online cooperation between UAVs must be satisfied, we use the commercial aviation flight regulation to get the local optimal solution, in which the UAVs will take a right turn to avoid each other. The simulation experiment proves that the computational efficiency and the quality of the obtained solution can meet the requirements to a great extent.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by National Natural Science Foundation of China (Number: 61906211).