
Abstract
To solve the problems of low accuracy and poor stability due to uncertainties, external disturbances and unknown load, which exist in the position control of rigid joint robot manipulator, this article is to propose Non-Singular Fast Terminal Sliding Mode Control strategy with Wavelet neural networks observer (NSFTSMCW). The wavelet observer is designed using the online approximation capability of the neural network, which is used to online estimate the modeling error, external disturbances and uncertainties generated by the dynamic surface control of the joint robot online. Combining the above strategies, the robot manipulators position controller is designed. The stability of this control strategy is demonstrated by stability analysis using the Lyapunov criterion. Simulations on the 2-Link Rigid Joint (2LRJ) robot show that the control strategy can overcome the chattering phenomena ensures the accuracy and stability of the joint robot position control.
Keywords
Introduction
Nowadays, robotic manipulators are presenting in different fields, such as space exploration, surgical robot, industrial application. In order to meet the requirements of control performance, various advanced control technologies could be applied to the controllers of robotic manipulators. 1 Racking control of robot manipulators, which is required to provide high accuracy, stability and safety, in the presence of huge uncertainties, disturbance has been a critical issue in both academic and industrial applications. How to improve the tracking performance and transient response for robot manipulators, particularly in the presence of external disturbance and possible actuation failures is still a challenge research community. 2
In the literature, several methodologies have been developed in order to increase the tracking performance, and reliability of robot manipulators. In the initial approaches, PID controller, 3 optimal control, 4 learning control, 5 robust control, 6 adaptive control, 7 backstepping control, 8 fuzzy control, 9 sliding mode control, 10 and neural network control,11,12 have been developed. Among these controllers, the Sliding Mode Control (SMC) has proven to be very robust against uncertainties and disturbances for non-linear systems. As a result, (SMC) has been widely taking into account for application in real systems. 13 However, traditional (SMC) has drawbacks that limit its performance. It does not provide a finite time convergence, it is worst to tackle the rapid variations effects of disturbances. It is still suffers from chattering behavior, and the design procedure requires a prior knowledge of the upper bound value of the uncertainties, and disturbance. 14
Beside the references cited above, many several other approaches have been developed to preserve the benefits and reduce or eliminate the drawbacks of the conventional (SMC). For example, to mimic the property of the integral component in the (PID) controller to enhance the transient response of the conventional (SMC), Integral Sliding Mode Control (ISMC) or PID-based SMC (PID-SMC) has been developed. In order to obtain both fast transient response and finite time convergence, Integral Terminal Sliding Mode Control (ITSMC), has been worked out. 15
To eliminate the chattering, several approaches have been improved by using either boundary method or disturbance observer or High-Order Sliding Mode Control (HOSMC). 16 In addition, Fast Terminal Sliding Mode Control (FTSMC) and Nonsingular Terminal Sliding Mode Control (NTSMC), have been realized separately.14,17 Unfortunately, the individual approaches based on (FTSMC) or (NTSMC) have just only solved one aspect and ignored the other problems of the conventional SMC. In order to obtain both fast finite time convergence and singular elimination, Nonsingular Fast Terminal Sliding Mode Control (NFTSMC) has been proposed.18–21
However, chattering is not suppressed by applying a high frequency reaching control term to the control input of the above systems. One of the key issues when designing a (NFTSM) controller is to know the bounded value of dynamic perturbations and uncertainties.22–27 In order to tackle this dependence, several attempts have been introduced as observers, neural networks.28,29 Recently, researchers have developed a considerable interest in using the Wavelet Neural Network (WNN) to approximate the bound value of uncertainties.30,31 In summary, each drawback of the conventional (SMC) has been tackled by a corresponding suitable approach, however, there are no approaches in the literature that intended to design a single controller that considers all the drawbacks of (SMC) together and solve them simultaneously.
Motivated by the above issues, this paper presents a new approach allowing a finite time convergence without singular problem, fast transient response, high tracking precision and less chattering. Therefore the proposed approach is based on a Non-Singular Fast Terminal Sliding Mode Control with compensation term based on Wavelet neural network observer (NSFTSMCW), As wavelet has the capability to approximate unknown functions faster and with fewer nodes than conventional neural networks, it is capable of working out the target threat evaluation contrasted with the other traditional approaches.
The main contributions of this paper are as follows:
- Unlike the existing robust approaches which are formulated under the assumption that the bound of the system uncertainty and disturbances are usually required to be known in advance, an adaptive parameter-tuning procedure is proposed here to estimate the unknown upper bounds. Therefore, the bound of the lumped uncertainty is unnecessary.
- The nonsingular fast terminal sliding manifold is proposed in the same way as other research work on the same topic, but the method used to approximate the bound value of uncertainties is dealt with differently.
- Based on the good performance of using Neural Network (NN) to estimate the upper bound of uncertainty, and due to the superiority of Wavelet Neural Network (WNN) over (NN), we admit in this paper the (WNN) as the approximation tool instead of adaptive laws. Owing to (WNN) estimation properties, the chattering phenomenon is remarkably reduced.
- In addition, a robust term is proposed in this paper to elevate the effect of approximation errors. The proposed controller (NFTSMCW) inherits the benefits of NFTSMC, WNN, adaptive rules, and the robust term, as a consequence, the tracking performance is enhanced considerably despite the presence of uncertainties and external disturbances.
The remainder of this paper is organized as follows. Section II outlines the problem formulation. Section III details the design of the Non-Singular Fast Terminal Sliding Mode Control with compensation term based on Wavelet neural network observer (NFTSMCW), then the globally asymptotic stability proof is discussed using the Lyapunov criterion. Section IV describes the simulation model and results. Finally, in section V some observations, conclusions and prospects for the future research are given.
Problem formulation
Figure 1 exhibits the chosen architecture of the robot. The dynamic model of the (2LRJ) manipulator, is described by the following equation (1):


Two-Link-Rigid-Joint (2LRJ) robotic manipulator.
Where
The 2LRJ robotic manipulator dynamics can be examined as the following matrix equation (2).

Where

Controller design
NSFTSMC
In order to use a simple form of equation (1), we introduce the notation

Where:


Assuming, that the control input does not involve the acceleration signal, the upper bound of the lumped uncertainty is a function consisting only of position and velocity measurements, therfore

with
for a variable vector

The sliding surface can be chosen as the following equation (8):

Then time derivative of the sliding surface is expressed by the equation (9):

Where, the terminal sliding manifold is defined as:

When the state of the system is far from the equilibrium state, the sub-element

The switching control law

Where:

Where:


We get the final equation (13b):

Wavelet estimator design
Wavelets Neuron Network (WNN), are a family of functions from signal and image processing, which have recently been shown to possess the property of universal approximation. Combined with efficient learning algorithms, they constitute a powerful modeling tool for nonlinear processes. Therefore, the output

Where:

Mexican hat function is chosen as the mother wavelet as given in the following equation (19):



In the new sliding mode control, firstly, uncertainties are approximated with wavelet network. Next, we combine the outputs of (WNN) with (NSFTSMC). Through this combination, the overall control law can be shown in the following equation (19):

Where



Block diagram of NSFTSMCW based control law.
Substituting the overall control law (19) into

The parameters of the proposed controller are adjusted on-line as following:

Where
If the (NSFTSMCW) is defined by (8), assumptions A1, A2, A3, and A4 are satisfied and the control approach is elaborated as (19). With its online adaptation method described in (23), the proposed controller ensures the convergence of the tracking error to zero in a finite time
NSFTSMCW stability
The Lyapunov function

Where:

According to (23), in terms of assumption A2 and A4, we get:







The online adaptive updating rules leads to:


Where


With:

Discussion and results
In this section, the proposed strategy was applied to a pathway tracking control for the (2LRJ) robot manipulator shown in Figure 1. For numerical simulation the desired trajectories for the position tracking is defined as the following form (29):

The initial values of the system are selected as:

The following nominal parameters are considered for the robot manipulator model:

The WNN architecture used for the synthesis of the estimator is based on 10 nodes in the hidden layer, initial parameters were set randomly, and the (WNN) input was selected as:
NSFTSMCW PARAMETRS.

To ascertain the robustness of the proposed strategy, we evaluate the system performance while introducing parameter variation and external disturbances into the system which are modeled as follows:

For dynamic parameters, an additive variance of 20% of their nominal values is considered. Two typical cases are considered. Firstly, the performance of the established proposal (NSFTSMCW) is checked in the presence of uncertainties and external disturbances. Secondly, a variation of the payload is considered to further test the efficiency of the proposed adaptive approach. The position and velocity tracking performances under uncertainties and time-varying external disturbances are illustrated in Figures 3 and 4, respectively. Figures 3 and 4 show that in the absence of the term of compensation, a degradation in the performance of the controller is clearly observed. It comes in the form of a decrease in speed which directly influences the tracking performance.

Position tracking: (a) joint 1- and (b) joint 2.

Velocity tracking: (a) joint 1- and (b) joint 2.
Figure 5 verifies, that the control input is smooth which demonstrates the insensitivity of the suggested (NSFTSMCW) to unknown parameter variations and external disturbances. Furthermore, a small control effort at the beginning is noticed, which helps to avoid the harmful saturation of the control inputs. The effectiveness of the (NSFTSMCW) is also demonstrated in Figure 6, where the sliding manifold is chattering free. The tracking performance is enhanced due to the capability of the (NSFTSMCW) to cancel estimation errors and disturbances.

Control torque: (a) joint 1- and (b) joint 2.
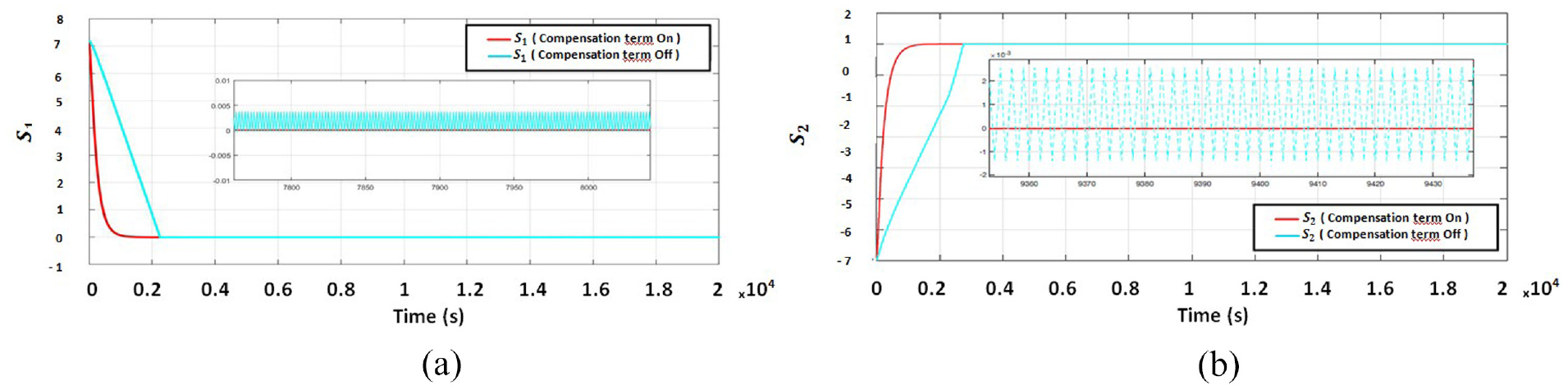
Sliding surface: (a) joint 1- and (b) joint 2.
In the presence of the uncertainty and time varying external disturbances, the position and velocity tracking are illustrated in Figures 7 and 8. For testing, a load is picked by the robotic manipulator at t = 10s , and the mass of link 2 is increased from 1.5 to 2.5 kg. Figures 7 and 8, present a smooth control input, a small control effort at the beginning is also noticed, which makes it possible to avoid the harmful saturation of the control inputs. The Figure 8 confirms, that the finite time tracking performance of the robotic arm is always achieved as the load on link 2 varies.

Position tracking under load variation: (a) joint 1- and (b) joint 2.

Error tracking under load variation: (a) joint 1- and (b) joint 2.
Figure 9 illustrates the control input torques, while Figure 10 depicts the sliding surfaces of both joints. The simulation result confirms that the engineered (NFTSMCW) is insensitive to variations in unknown parameters and external disturbances. This observation is validated by the smooth shape of the curve recorded in Figure 9(j), indicates the presence of an additional control effort which can overcome the undesirable saturation of the control inputs.

Control torque under load variation: (a) joint 1- and (b) joint 2.

Sliding manifold under load variation.
Conclusion
In this paper, we have developed a new robust control approach. The proposed strategy (NFTSMCW) is a combination of (NFTSMC) and (WNN) acting as estimator of uncertainties and external disturbances. The validation of the developed controller is tested for trajectory tracking of a two-link rigid robot manipulator arm. In terms of robustness, the proposed controller is adopted in order to reduce the stresses at start-up while maintaining fast convergence toward zero. The numerical simulations illustrate improvements made by the proposed approaches. Future work will involve the use of the recurrent wavelet network instead of the conventional wavelet network. The effects of the measurement noises and sensor faults to the system control performance will be studied. Tuning mechanisms will also be developed to obtain the optimal values for the major parameters of the proposed controller.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.