
Abstract
As an essential part of the transportation industry, it is necessary to reduce the fuel consumption of commercial vehicles from the perspective of the environment and economy. Previous studies have shown that optimizing the gear sequence can reduce vehicle fuel consumption. This paper presents a gear decision method based on predictive road information. Under the model predictive control framework, the dynamic programming algorithm is used to solve the multi-objective optimization problem of gear decision. To solve the problem of the long calculation time of the dynamic programming algorithm, the nonlinear optimization algorithm is used to optimize the dynamic programming sub-problem, and the optimal gear sequence of fuel consumption is obtained. The final optimized gear sequence is obtained through the dynamic programming algorithm. The simulation analysis of the proposed gear shift decision method shows that the gear shift decision method can effectively reduce fuel consumption under fixed working conditions. Compared with the economic shift schedule, the fuel consumption is reduced by 5%, and the computing speed is improved compared with the dynamic programming algorithm.
Keywords
Introduction
Efficient transportation is an integral part of the modern economy. Road vehicles are an essential pillar of the transportation industry. From the perspective of the environment and economy, reducing the energy consumption of vehicles is a critical link. About one-third of the life cycle cost of a heavy commercial vehicle comes from the fuel cost, 1 so it is necessary to save energy consumption for such vehicles. The fuel consumption level is related to the technology used in the powertrain and is affected by fuel composition, driving conditions, and shifting strategies adopted. 2 The Internet of Vehicles can provide available predictive road information for vehicles, which offers new opportunities for optimizing vehicle powertrain and chassis control and minimizing fuel consumption, which is crucial for heavy commercial vehicles. 3
Many control algorithms have been proposed to research the gear position decision method. Xu et al. 4 carried out gear optimization for heavy trucks. Taking the optimal shift curve solved by a deterministic dynamic programming algorithm as a benchmark, a neural network is constructed to predict the optimal shift decision. The neural network is trained through the driving cycle under different working conditions to achieve the purpose of fuel saving. The team also designed an online shift scheduling method based on the rain flow counting method and compared it with the previous neural network optimization method. The calculation efficiency of the rain flow counting method was higher. 5 Eckert et al.6,7 considered the influence of driving style on fuel consumption and used a multi-objective genetic algorithm to solve the problem of fuel economy and performance optimization. Different shift strategies were selected for experiments, which can save 10.7% of fuel. Under the model predictive control framework, Guo et al. 8 obtained the optimal shift schedule by solving a nonlinear time-varying optimization problem, which also achieved an ideal fuel-saving effect. Lu et al. 9 proposed a hybrid model predictive control-based optimization method for the drivetrain, and the simulation results show that the shifting strategy is effective in reducing fuel consumption and improving driving performance. Barbosa et al. solved the optimization problem with the minimum fuel consumption and travel time as the optimization objectives and analyzed the results of gear optimization under different fuels. The optimized gear can reduce fuel consumption and not significantly increase travel time. 10 Lin et al. proposed an adaptive shift strategy based on the driver’s behavior. The dynamic correction factor was introduced for the fixed shift strategy to modify the dynamic correction coefficient of different driving styles and adjust the ratio between economic performance and power performance in the shifting process. Compared with the traditional shift strategy, it has a better energy-saving effect and can meet the needs of different driving styles. 11 Jeoung et al. 12 used an optimal shift strategy based on greedy control to improve fuel efficiency by 1.6% without frequent shifts. Lin et al. used the DP algorithm to search for the optimal global working point offline by considering the critical related factors such as shift time, transmission efficiency, and various driving cycle characteristics. Then, the K-means clustering algorithm was used to extract the optimal shift curve. Compared with other hybrid strategies, this strategy can significantly improve the system’s energy consumption and has high efficiency, flexibility, and online implementation. 13 Liu et al. developed a shift strategy for driving intention perception. The simulation results show that the strategy can effectively reduce the number of shifts and achieve better fuel economy. 14 Ye et al. designed the automatic shift strategy of deep loop neural networks and compared DRNN and neural networks’ strategies. The results show that DRNN has higher accuracy and adaptability than the neural network. 15 Based on the dynamic programming algorithm, Cong et al. 16 designed the shifting strategy of different road slopes, adjusted the weight of economy and power according to the road slope value, and avoided unnecessary shifting before entering the slope and frequent shifting on the slope. Nguyen et al. 17 proposed a new shift strategy for a dual-motor power system, which selected gears according to the equivalent motor efficiency to ensure maximum efficiency. Shao and Sun optimized the combination of speed and gear. Using the model predictive control method to solve the mixed integer programming problem, the coordinated optimization of speed and gear can save 10.6% fuel. 18 Table 1 summarizes the methods, applicable models, and limitations in the above literature. Through the above literature, we can learn that the algorithm-based optimization of gear sequence has a significant reduction effect on the fuel consumption of the vehicle. However, most of the decision-making methods for commercial vehicle gearing still use dynamic programming algorithms, which cannot optimize the commercial vehicle gearing in real-time combined with real-time road information.
Summary of the literature.

The purpose of this paper is to combine real-time road information to optimize the commercial vehicle gear in real time to reduce fuel consumption while ensuring vehicle power performance. A nonlinear model predictive control algorithm based on a dynamic programming algorithm is proposed to optimize the gear decision of commercial vehicles. The multi-objective optimization cost function of gear decision is established. Under the model predictive control framework, the multi-objective optimization cost function is solved based on dynamic programming combined with forward-looking road information. To solve the problem of large calculation amount and long calculation time of dynamic programming, the nonlinear optimization method is used to optimize the optimal fuel economy of the gear in advance. Then the dynamic programming optimization is carried out based on the optimized gear sequence to obtain the final gear sequence. The structure of this paper is as follows. Section 1 introduces the research background, status, and content of this paper. Section 2 establishes the vehicle longitudinal dynamics model and the powertrain model. Section 3 establishes the multi-objective optimization cost function of gear decision and solves it based on dynamic programming and nonlinear optimization method. In section 4, the simulation and comparison of the designed control method and the economic shift law of the original vehicle under high-speed cycle conditions are carried out. Finally, section 5 is the conclusion.
Vehicle model
The target model of this paper is a heavy truck with 12 forward gears. The schematic diagram of the vehicle power transmission system is shown in Figure 1. The power provided by the engine is transmitted to the wheel through the clutch, transmission, and main reducer. This section will establish the vehicle driveline model, including engine modeling, transmission system modeling, and vehicle longitudinal dynamics model.
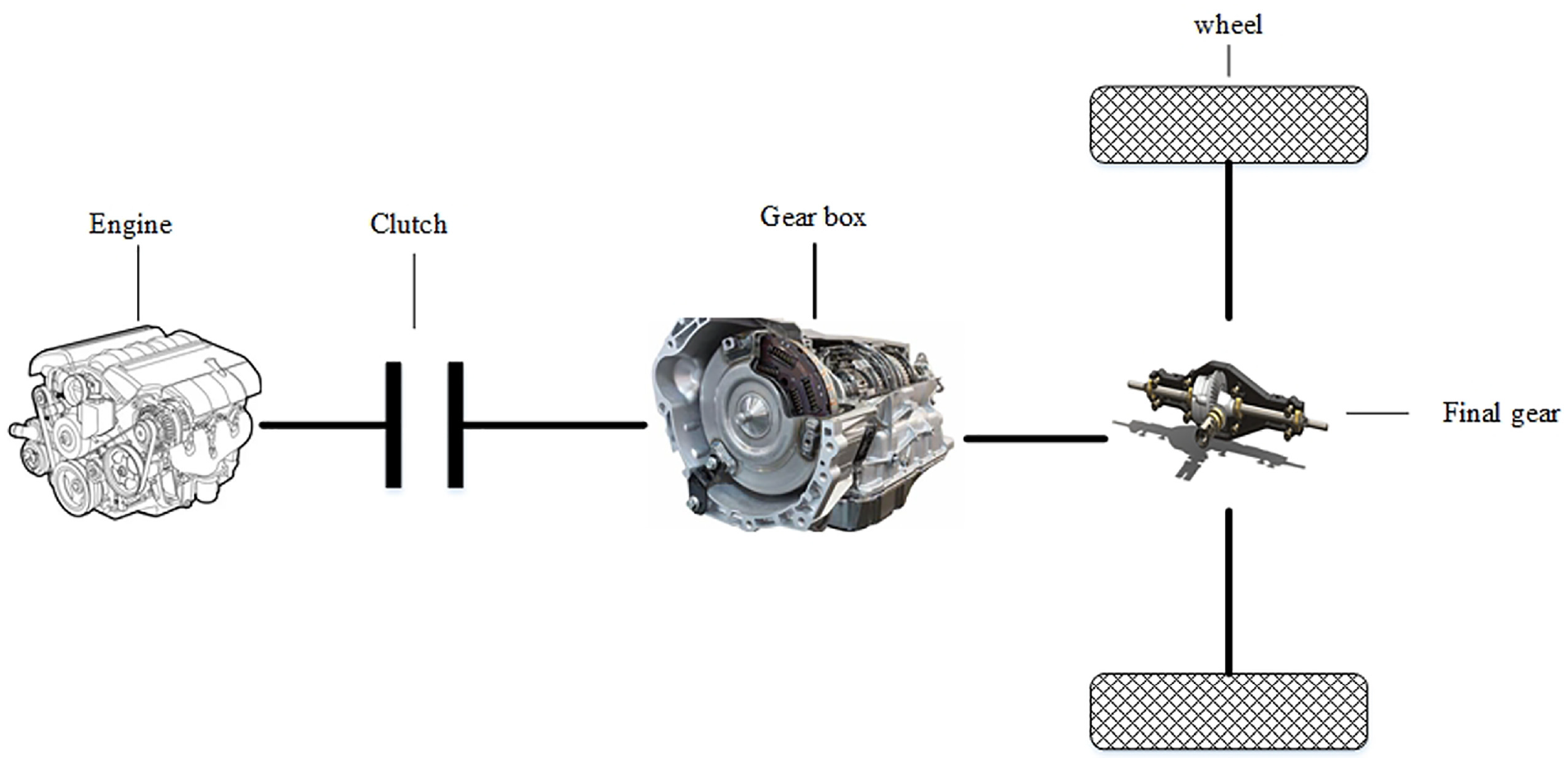
The vehicle power transmission system.
Engine model
The engine model is the basis of the vehicle model. The functional characteristics of the engine are mainly manifested as load, speed, fuel economy, and emission characteristics. The shift strategy calculation studied in this paper needs to use the load characteristics of the engine and the fuel economy characteristics so that this section will conduct modeling for these two parts.
Engine torque characteristics
The engine torque model generally uses the steady-state characteristics of the engine, which can be expressed as a function of engine speed and throttle opening and can be expressed as

According to the data obtained in the experiment, the experimental data under the corresponding throttle opening can be fitted with a quadratic curve, which is expressed as

Fuel consumption rate model
The engine fuel consumption rate model generally uses the brake-specific fuel consumption (BSFC)to describe the engine fuel consumption rate, which can be expressed as

It can be seen from equation (3) that engine fuel consumption rate is a function of engine speed

The fitting characteristics of fuel consumption rate are shown in Figure 2.
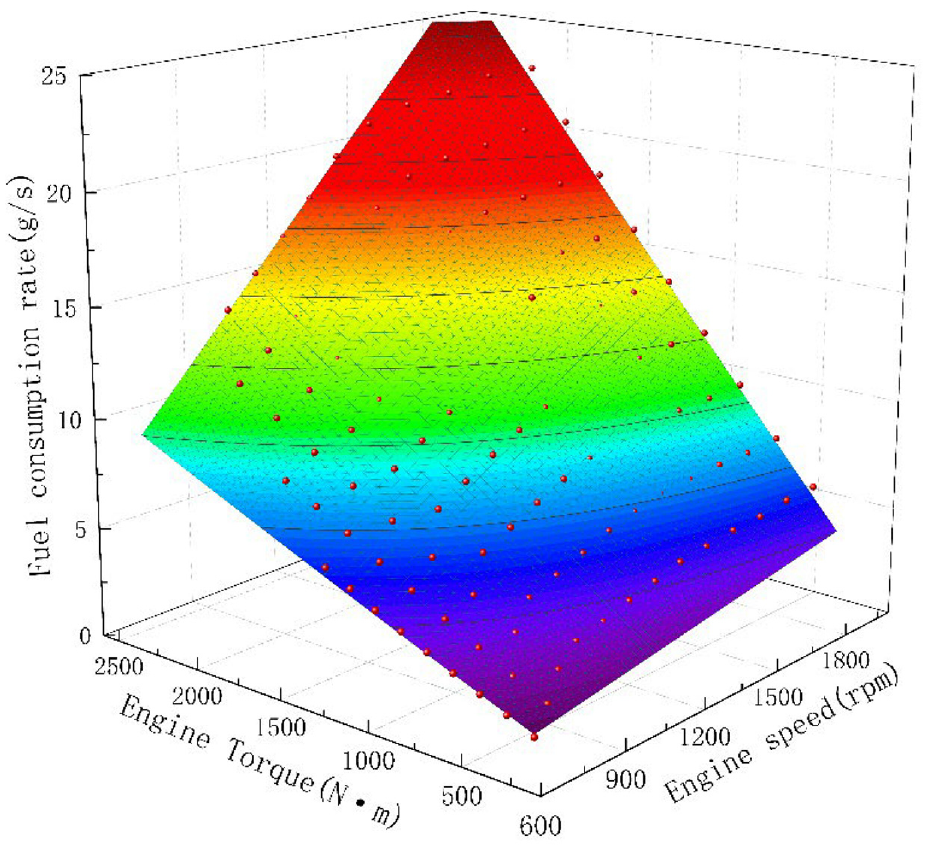
Fitting characteristics of fuel consumption rate.
Driveline model
The vehicle driveline can be divided into the engine and the transmission system. The transmission system mainly includes the clutch, transmission, transmission shaft, final gear, driveshaft, and wheels. The basic model of the power transmission system in the form of concentrated inertia is established, as shown in the Figure 3. It is assumed that the driveshaft and the drive shaft are rigid, and the transfer torque and speed on the shaft are equal. To simplify the model, the driveshaft and the drive shaft are omitted from the model.

Driveline model.
The engine power transmission model can be expressed as

Without considering the combination characteristics of the clutch during shifting, only considering the complete combination of the clutch, the clutch transmits the output shaft torque to the transmission input shaft, ignoring the internal friction and system inertia of the transmission and the main reducer. The transmission model of the clutch, the transmission, and the main reducer can be expressed as



Longitudinal dynamics model of vehicle
There are many degrees of freedom in the longitudinal driving process of the vehicle. Although the model with a high degree of freedom can more accurately describe the longitudinal driving state of the vehicle, the establishment and solution of the multi-degree of freedom model are more complex. Therefore, this paper simplifies the longitudinal dynamic model of the vehicle to a single degree of freedom model, and the analysis of the longitudinal force of the vehicle is shown in Figure 4.

Vehicle longitudinal driving force analysis.
According to Newton’s second law, the longitudinal dynamic equation of the vehicle can be obtained as follows.

The traction force, rolling resistance, air resistance, ramp resistance, and acceleration resistance can be expressed as





Inertia resistance and moment of inertia need to be overcome during vehicle acceleration. Inertia resistance is produced by vehicle mass translation and moment of inertia is delivered by vehicle rotating mass. Therefore, the value of
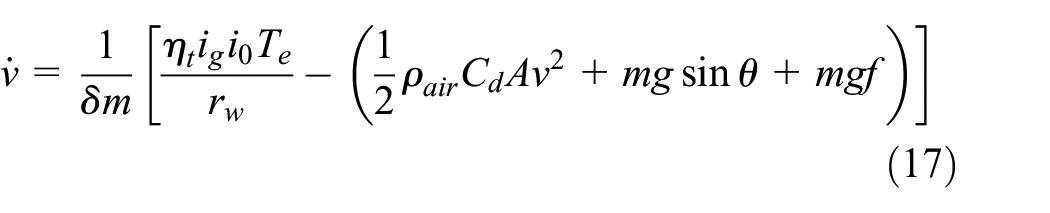
According to equation (10)–(14), equation (9) can be expressed as

A simple second-order vehicle longitudinal dynamics model for control can be obtained.

Model predictive controller design
In this section, according to the vehicle longitudinal dynamics model established in section 2, the cost function of the multi-objective optimization problem is established and solved based on the DP-MPC method. However, because the calculation amount of the dynamic programming algorithm is exponentially expanded with the increase of the system state and the stage, it is challenging to apply dynamic programming to real-time online implementation. Therefore, we decompose the optimization problem into an optimal sub-problem, optimize the sub-problem by the nonlinear optimization method, and finally optimize the problem with a dynamic programming algorithm. The controller architecture of this paper is shown in Figure 5.

The controller architecture of the system.
Establishment of multi-objective optimization problem
The shift strategy of the vehicle in the longitudinal driving process is closely related to fuel consumption. The primary function of the truck is to achieve economic transportation. Therefore, the formulation of the shift strategy can meet the power demand of the vehicle and reduce the multi-objective optimization problem of fuel consumption. At the same time, due to the power interruption of AMT in the shifting process, the shift frequency needs to be controlled. Therefore, establish the following multi-objective optimization problem.

Subject to

Where,

Dynamic programming algorithm
A dynamic programming algorithm is a nonlinear programming method, which is a standard method to obtain the optimal solution to multi-stage decision-making problems. Some optimal control problems can be converted into multi-stage decision-making problems for solving. Since dynamic programming is generally used to solve discrete systems, the vehicle dynamics model and multi-objective optimization problem can be converted into discrete forms, which can be expressed as



According to the Bellman optimality principle, the recurrence equation of the optimization problem in equation (22) is

Where,
Starting from the terminal, the optimal control, optimal state, and minimum cost function value can be obtained by reverse recursive optimization. The steps to solve the optimization problem by dynamic programming are as follows.
(i) Solving minimum objective function value

(ii) Solving minimum objective function value

(iii) Step by step forward recursion to solve the minimum objective function value
(iv) According to the initial gear state of the control system, the optimal gear sequence
Nonlinear optimization algorithm
In the dynamic programming algorithm, to calculate the minimum fuel consumption, in the case of shifting, it is necessary to traverse all possible gears to obtain the optimal gear sequence with minimum fuel consumption, which will undoubtedly increase the amount of calculation. Therefore, to calculate the optimal gear sequence with minimum fuel consumption and reduce the amount of calculation, the nonlinear optimization method is used to calculate the optimal gear sequence first. Then the dynamic programming algorithm is added to other objective optimization to obtain the predictive optimal gear sequence. The minimum fuel consumption objective function is as follows.

Where,


Where,


Where,

When
Given the initial gear
When
Using trust region method for solving penalty factor
Let
Simulation analysis
In this section, simulation experiments are carried out on the predictive gear decision method proposed in this paper. Fuel economy is the most intuitive evaluation index to evaluate the advantages and disadvantages of the gear decision strategy. Meanwhile, it is also an essential evaluation index for target speed tracking in terms of dynamic performance. The simulation condition of this paper is set as the CHTC simulation condition of Chinese commercial vehicles.
First, the vehicle was driven on the flat road at the speed specified in the working condition. The influence of the original vehicle’s economic shift map, the dynamic programming method, and the predictive gear decision method shift on gear, speed and fuel consumption was compared. The simulation results are shown in Figures 6 to 8.

Comparison of shift sequence of different shift strategies on flat road.

Comparison of vehicle speed of different shift strategies on flat road.
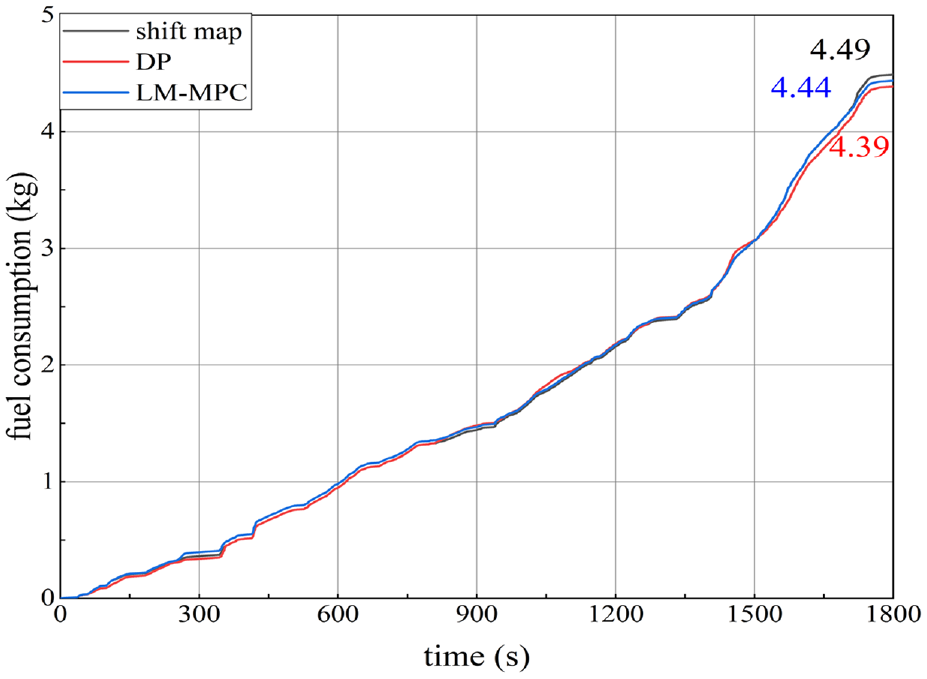
Comparison of fuel consumption of different shift strategies on flat road.
It can be seen from the figures that the predictive gear decision method designed in this paper can better complete the gear decision in the process of vehicle driving and also ensure the tracking performance of vehicle speed. Compared with the gearing sequence of the economy shifting map, the gearing rise time of the gearing sequence of the predictive gearing decision-making method is earlier than that of the economic shifting map. Transmission working in high gear is conducive to saving fuel. Therefore, the proposed predictive gear decision method can save fuel better than the original vehicle economic shifting map. In the 1800 s cycle condition, the fuel consumption is reduced by 0.05 kg, and the fuel consumption is saved by 1.1%. Compared with the dynamic programming algorithm, although the fuel consumption is slightly higher than that of the dynamic programming algorithm, the calculation speed is faster than that of the dynamic programming algorithm. The ratio of simulation time to actual time is 0.17, which is significantly lower than the 1.0 of the dynamic programming algorithm. At the same time, the shift number of this method is less, which saves fuel and ensures driving ability, avoiding frequent shifts of vehicles.
The road slope greatly influences the gear shift decision-making but also affects the fuel economy. To better verify the optimization of the predictive gear shift decision method proposed in this paper in terms of fuel economy consumption, aiming at an experimental road condition, the influence of the original vehicle economy shift map, the dynamic programming method, and the predictive gear shift decision method shift on gear, vehicle speed and fuel consumption is compared. The road altitude 19 and the simulation results are shown in Figures 9 to 12.

Road altitude of the cycle. 19

Comparison of shift sequence of different shift strategies on sloping road.

Comparison of vehicle speed of different shift strategies on sloping road.

Comparison of fuel consumption of different shift strategies on sloping road.
It can be seen from the figures that due to the influence of road slope, the fuel consumption of the original vehicle’s economic shift curve is significantly increased. This is because the economic shift map does not calculate the influence of road slope so that the fuel consumption will be increased considerably on the slope. The predictive gear decision method is almost the same as the dynamic programming algorithm in terms of fuel consumption. Under the 1800 s cycle condition, the fuel consumption of the predictive gear decision method is reduced by 0.26 compared with the economic shift curve, and the fuel saving is about 5%. At the same time, in terms of computational efficiency, the ratio of simulation time to the actual time of the predictive gear decision-making method is 0.18, which is significantly lower than the 1.5 of the dynamic programming algorithm. Therefore, the predictive gear decision-making method proposed in this paper can effectively optimize the vehicle gear. In terms of shift frequency and fuel economy, compared with the shift strategy of the original vehicle, it has specific improvement. At the same time, in terms of calculation speed, it has obvious advantages compared with the dynamic programming algorithm.
Conclusion
In this paper, a predictive gear decision method is proposed, and a multi-objective optimization problem based on vehicle economy, power performance, and shift frequency is established. The method based on model predictive control is solved by dynamic programming. At the same time, to solve the problem that the calculation time of the dynamic programming method increases due to a large amount of calculation, the L-M algorithm is used to solve the optimal fuel economy gear, and the predictive gear decision method is based on nonlinear model predictive control and dynamic programming is formed. Through the simulation analysis of flat road conditions and ramp conditions, the proposed predictive gear decision method has a specific improvement in shift frequency, fuel consumption, and speed tracking performance compared with the original vehicle economic shift curve. Regarding fuel economy, the predictive gear decision method can save about 5% of the fuel and the computing speed is improved compared with the dynamic programming algorithm.
The algorithm proposed in this paper can significantly reduce fuel consumption, but there are still some limitations. Only the optimization of gear decision-making under fixed conditions is considered. For further research, it is necessary to consider the fuel consumption under more conditions to further prove the algorithm’s effectiveness. Secondly, the calculation speed in the simulation environment is only considered. In the next step, the real-time performance of the algorithm needs to be verified in the bench test and real vehicle test. Finally, the algorithm proposed in this paper is combined with vehicle speed control algorithms such as vehicle power demand prediction and predictive cruise control. The vehicle comprehensive fuel consumption is optimized by integrating vehicle speed and gear, which is also our subsequent research work.
Footnotes
Appendix
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the 13th Five-Year Science and Technology Project of Education Department of Jilin Province, Grant No. JJKH20200957KJ and Regional Innovation Cooperation Project of Department of Science and Technology of Sichuan Province, Grant No. 2021YFQ0052.