
Abstract
The damping enhancement effect of the inerter system means that its energy dissipation efficiency can be improved with respect to the traditional dampers. Energy dissipation efficiency have been considered as the optimal design principle of the inerter system, however, the solution for optimized key parameters is difficult because of the special mechanical behavior of the inerter. A modified float-point encoding genetic algorithm is proposed in this study to realize the optimal design of the inerter system with maximized energy dissipation efficiency effectively and robustly. A novel and simple crossover strategy termed differential crossover is proposed and applied in the classical genetic algorithm to optimize the inerter system more effectively. The differential crossover strategy means that a new individual is generated based on the difference between two randomly selected individuals in the population. The mathematical expression for the optimization problem of the inerter system corresponding to the maximum energy dissipation efficiency design principle is established. Following the performance-oriented design concept, performance demand is taken as the constrained condition of the optimization problem. Case design confirms that the modified genetic algorithm can successfully solve the optimization problem of the inerter system and perform a better solving ability over the original genetic algorithms.
Keywords
Introduction
Structural vibration control techniques can effectively control the dynamic response of a structure under earthquake loads.1–8 Based on many studies, energy dissipation devices can effectively reduce the structural vibration response caused by earthquake loads.9,10 As a new type of energy dissipation and damping device, the inerter system has attracted much attention in the engineering field. Its main feature is that it can flexibly adjust the structural inertia without changing the physical quality of the original structure by using a two-terminal mass element.11–13 Many scholars have conducted some studies on the theory of the inerter system, among which the fixed-point method 14 and random vibration response method 15 are the most representative. With the deepening of research, a variety of energy-consuming and shock-absorbing, and isolating devices combined with inerter have come out one after another.16–20 Inoue and Ikago’s research team21–23 first proposed a tuned viscous mass damper (TVMD), a classical type of inerter system. Arai et al. 21 found that TVMD has obvious effect on the vibration control of the structure. Both Kida et al. 24 and Ikago et al. 25 have also verified the damping control effect of TVMD through corresponding shaking table tests. Based on the fixed-point theory, Ikago et al. 26 proposed the design method of the TVMD for single-degree-of-freedom (SDOF) and multiple-degree-of-freedom structures with inerter systems. Marian and Giaralis 18 proposed a new type of passive control device, namely tuned mass damper inerter (TMDI). By comparing it with a tuned mass damper (TMD) in the SDOF structure, they found that TMDI has better performance. Pietrosanti et al. 27 optimized an SDOF structure with a TMDI by various methods and analyzed it in comparison with conventional TMD structures, then found that the TMDI has better performance and robustness in reducing the dynamic response. Chen et al. 28 optimized inerter-based structure using an energy-based method considering the interaction between the structure and the soil. Pan and Zhang 29 derived the analytical expressions of the stochastic responses of an SDOF structure with the inerter system. De Domenico and Ricciardi 11 found that the inerter system can also play a better control role in the isolated structure by comparing it with the classical tuned mass damper. Through numerical verification, Qian et al. 30 found that the series tuned inerter damper has good seismic isolation performance in a wide frequency range. Xue et al. 31 proposed a new cable-bracing installation method for the inerter system, which can give full play to the energy dissipation efficiency of the inerter system. Pan et al. 32 put forward the concept of taking the minimum cost as the control objective on the premise of meeting the structural performance demand. Zhang et al. 33 used the inerter system for structural control of the wind turbine tower. Zhao et al. 34 proposed a demand-oriented optimization design method of inerter system considering the influence of soil conditions and structures on structural performance. Based on the random response theory, Zhang et al. 35 theoretically derived the analytical equation of the damping enhancement principle of the inerter system, thus providing a more concise calculation method for the optimal design of the key parameters of the structure with inerter system.
In this study, the maximization of the damping enhancement effect is selected as the principle to optimize the inerter system. 35 Analytical solution for the optimization problem is hard to obtain, therefore, numerical approaches are always involved. Conventional numerical optimization algorithms require the derivation of complicated expressions for the gradient of the objective function and good initial guess of solutions, which makes it unsatisfactory in optimizing the parameters of the inerter system because of the complex response expressions. Besides, the utilization and modification of classical methods usually require in-depth mathematical knowledge, which is not practical for engineering applications. Meta-heuristic algorithms provide a proper way to perform optimization in engineering practice. Research on meta-heuristic algorithms has intensified in recent years, and some of the representative algorithms include genetic algorithm, 36 differential evolutionary algorithm, 37 particle swarm algorithm, 38 colony predation algorithm, 39 hunger games search, 40 monarch butterfly optimization, 41 slime mold algorithm, 42 Harris hawks optimization, 43 and so on. In the process of optimizing solutions for specific problems, different improvements have been developed. D’Angelo and Palmieri 44 proposed a hybrid genetic algorithm to address the problem of local optimization of genetic algorithm. Finally, the hybrid genetic algorithm was tested and found to be more competitive than other algorithms in terms of computational accuracy and efficiency. Deng et al. 45 improved the variational strategy of the differential evolution algorithm and tested the results and found that the improved differential evolution algorithm has better optimization capability in solving high-dimensional complex functions. Liu et al. 46 proposed a novel sigmoid-function-based adaptive weighted particle swarm optimizer and found that the new strategy has improved the convergence speed of the particle swarm algorithm. In recent years, various types of algorithms have been more widely used in the study of scheduling problems,47–51 and the study of algorithms has gradually shifted toward solving specific problems.
The genetic algorithm, a classical meta-heuristic algorithm, has been adopted for the optimization of inerter systems because of its easy implementation and better global convergence.52–54 To enhance the efficiency of the genetic algorithm without complicated operations, a modified genetic algorithm with good robustness, simplicity, and easy programing realizability is used to optimize the parameters of the inerter system. Firstly, the analytical solution of the random vibration response of the SDOF structure under white noise excitation is derived, and the mathematical expression of the optimal design of the structure with an inerter system according to the principle of maximum damping enhancement is given. Then the genetic algorithm is modified with a differential crossover strategy and the related computer program is developed in Python 55 to solve the nonlinearly constrained optimization problem. Finally, the effectiveness of the proposed algorithm and the obtained parameters are verified by case design.
Design theory of inerter system
Motion equation of SDOF structure with inerter system
The motion equation of classical SDOF structure under external excitation of

where,
When the SDOF structure is equipped with a series-parallel layout II inerter system
29
(SPIS-II), as shown in Figure 1, the degree of freedom of the structure is increased. If the structure is excited by earthquake, then

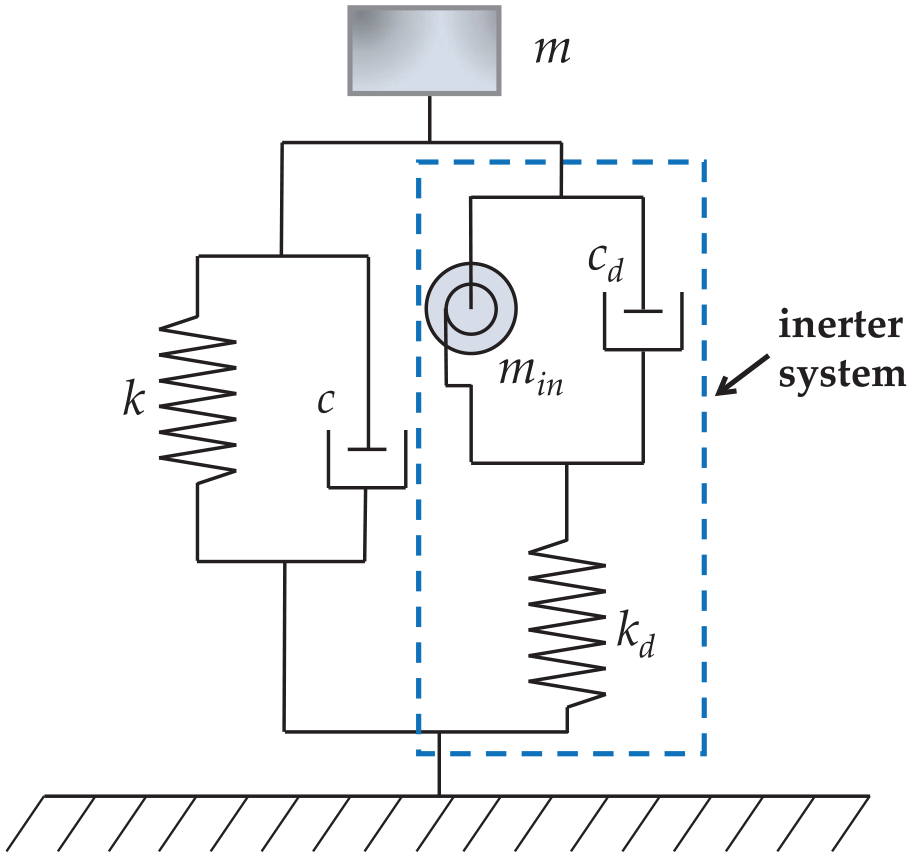
Schematic of an SDOF structure with an inerter system.
where,

where,
Notations.

After the dimensionless processing and merging of equations (2) and (3), the equation of motion can be rewritten as the following expressions:

where,

Analytical expression of random vibration response
According to equation (4), the frequency-domain transfer function of the displacement response of the SDOF structure with inerter system can be derived:


According to the random vibration theory,
15
under the excitation of white-noise (the power spectral density is

Substituting equation (6) into equation (8), the closed-form expression of the mean-square response of the structure with inerter system can be obtained 56 :

where,


The above expressions of random vibration response can be used to define the response mitigation ratio

where,

The specific expression of the response mitigation ratio of the structure with the inerter system can be obtained by substituting equation (9) and equation (13) into equation (12)

The damping enhancement effect of inerter system
The damping enhancement effect57,58 of the inerter system refers to that the deformation of the inerter system’s internal degree of freedom may be greater than the deformation of the structure at the installation position of the inerter system under the dynamic loads. Therefore, the damping element in the inerter system can dissipate more energy, 29 as shown in Figure 2.
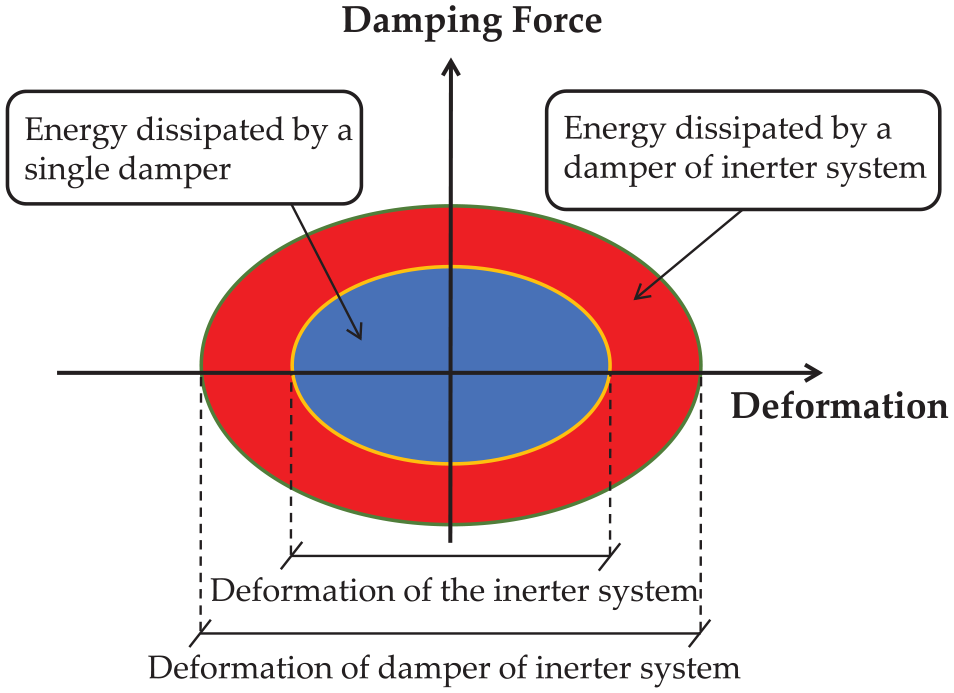
Schematic representation of the damping enhancement effect of inerter system.
To measure the energy dissipation efficiency of the inerter system, as demonstrated in previous study, 35 the damping deformation enhancement factor of the inerter system is defined as:

Based on random vibration response expressions, closed-form expressions of damping deformation enhancement factor of the inerter system under the white-noise excitation is 35 :



Performance-oriented optimization design of inerter system
Considering the structural performance demand, to give full play to the damping enhancement effect of the inerter system, this paper optimizes the parameters of the inerter system based on the premise of meeting the structure performance demand and the principle of maximizing the damping deformation enhancement effect. The optimization design problem of the inerter system can be expressed as a constraint optimization problem.

In the above equation,

From the damping enhancement equation,
35
it can be obtained that seeking the maximum damping deformation enhancement factor

In solving the constrained optimization problem described in equation (21), if the classical numerical method is used, the equation will be cumbersome, and the gradient calculation is inconvenient, therefore, the solution results are not ideal. As an intelligent algorithm, the genetic algorithm is easy to understand and realize, and robust to achieve rational optimal solutions. Therefore, this paper modifies the classical float-point encoding genetic algorithm to perform parameters optimization of the structure with the inerter system.
The optimization design of the inerter system is a constrained optimization problem, and the nature of the genetic algorithm is an unconstrained search method. Therefore, accompanied by a penalty factor, the damping enhancement optimization design of the inerter system is converted into an unconstrained optimization problem, and the mathematical expression is as follows:

In the equation,

where t is the iteration step of the algorithm during solution.
Modified genetic algorithm
Classical genetic algorithm
The genetic algorithm was proposed by Holland. 36 The genetic algorithm involves a calculation model of simulating genetic selection and natural elimination of biological evolutionary processes, according to “survival of the fittest.” Through individual selection, chromosome crossover, and gene mutation, more optimized solutions are evolved from generation to generation. That is, a combination of individuals is selected from the preferred solution using the genetic operators (selection, crossover, and mutation), and then the next generation is generated. The above process will be repeated until the convergence condition is satisfied. Compared with other heuristic algorithms, genetic algorithm is simple, robust, suitable for parallel processing, and has global convergence capabilities. 59
For populations in nature, each individual has a different ability to adapt to the environment. Individuals with strong adaptability can be easier surviving, or will be easily eliminated. At the same time, individuals with large fitness values can be inherited to the next generation through genes, so that the population genes are continuously updated and optimized. In the classical genetic algorithm, there are three basic operations, namely: selection, crossover, and mutation. Among them, the selection is based on individual fitness values for the retention of individuals with high fitness values for an inheritance to the next generation. The crossover involves a pairing of two selected individuals and a random exchange of genes between them. The mutation is a variation of genes with a mutation rate for the generated individual.
Through these three basic operations, the iteration of the population and the optimization of genes can be realized. The classical genetic algorithm design procedure can be expressed as follows:
Randomly generate N initial genes to represent N individuals, that is, initialize the population;
Calculate the individual fitness values;
According to the fitness values, obtain a new generation of the population through selection, crossover, and mutation operations;
Repeat (2)–(3) until convergence.
Modified genetic algorithm with differential crossover strategy
However, the calculational efficiency of classical genetic algorithm is not satisfactory enough and is prone to premature convergence problems.60–62 Therefore, this paper proposes a modification to the classical genetic algorithm to optimize the inerter system more efficiently. The crossover operation is an important feature that distinguishes genetic algorithm from other algorithms. The commonly used crossover operators are one-point crossover, two-point crossover, uniform crossover, arithmetic crossover, and so on. In this paper, a new arithmetic crossover operator, differential crossover, is proposed to improve the genetic algorithm.
The differential crossover strategy can be expressed as follows:

where
For the optimization problem of an inerter system,
It can be found from the above equation that the newly generated individual after crossover is related to the difference between the selected parents. That is why it is called differential crossover. The differential crossover operation is simple and can be proved to be efficient in the following discussions.
Design procedure of inerter system via the modified genetic algorithm
According to the above discussions, it is possible to summarize the general procedure (Figure 3) to solve the optimization design problem of the inerter system by using the modified genetic algorithm. The procedure can be described as follows:
The target response mitigation ratio
The population of the genetic algorithm is initialized: select the population size
The fitness
Perform differential crossover according to equation (24) and mutation to generate the next-generation population.
If the population reaches the maximum number of iterations or satisfies the convergence criteria, the process is terminated, otherwise, repeat steps (3)–(5).
Take the best final

Flowchart of the modified genetic algorithm for optimizing the parameters of inerter system.
Optimization example of structure with inerter system
Parameters solution of inerter system
An SDOF structure is taken as an example for response mitigation design. Detailed parameters: mass
To consider different response control demands, six design cases are conducted, and the specified inherent damping ratios and the target response mitigation ratios are listed in Table 2. And then the key parameters of the inerter system, that is,
Design cases of SDOF structure with inerter system.

To demonstrate the optimization process of the modified genetic algorithm with differential crossover strategy, the spatial distribution of the population at different iteration steps under design case 2 are shown in Figure 4. The three optimized design parameters of the inerter system are used as three axes to locate the position of each individual. The figures show that as the number of iteration steps increases, each individual evolves toward the optimal individual, and the whole population can eventually converge to the optimal solution, which indicates the good performance of the modified genetic algorithm with differential crossover strategy for parameters optimization design.

Iterative process of the modified genetic algorithm for optimizing inerter system (design case 2). Red points and dashes are the trajectory of the best individuals, the blue point is the current best individual. (a) Iterate once, (b) iterate 10 times, (c) iterate 20 times, and (d) iterate 50 times.
The population size has an effect on the ability of the modified genetic algorithm with differential crossover strategy to find optimal parameters. As can be seen from Figure 5, when the population is increased, the convergence speed of the objective function is accelerated and the accuracy is getting higher. After the number of populations is adjusted from 500 to 1000, it is already approximately converged in the same value within the first 20 iterations. To guarantee the solution precision, we set the population size

Convergence curve of the modified genetic algorithm with different population sizes.
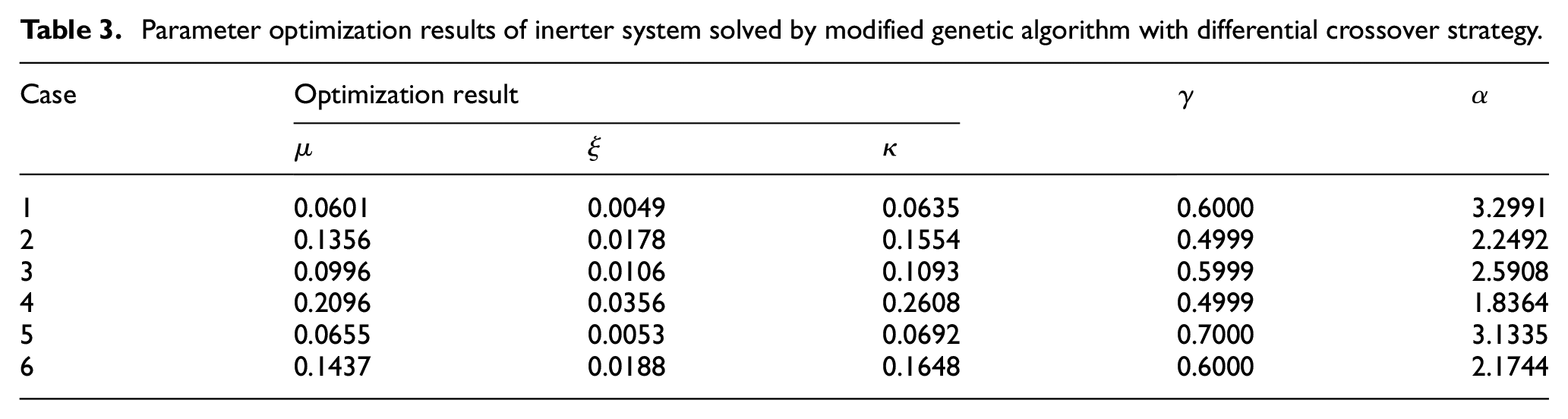
Finally, the solved three key parameters of the inerter system, the actual response mitigation ratio
Parameter optimization results of inerter system solved by modified genetic algorithm with differential crossover strategy.
Advantages of modified genetic algorithm with differential crossover strategy
To verify the advantage of the modified genetic algorithm with differential crossover strategy, the design cases in Table 2 are investigated further to study the convergences of three algorithms, that is, the classical binary-encoding genetic algorithm, the classical float-point-encoding genetic algorithm, and the modified float-point-encoding genetic algorithm with differential crossover strategy. The variation curves of the objective function values of the three different algorithms for the population iterations are given in Figure 6. It can be seen from the figure that the modified genetic algorithm proposed in this paper has the best convergence, the classical float-point-encoding genetic algorithm is worse and the classical binary-encoding genetic algorithm is the worst. Among them, the modified float-point-encoding genetic algorithm gradually converges to the minimum value as the population iterations increase, and the final convergence result is smaller than the other two algorithms without the jumping phenomenon. This indicates that the modified genetic algorithm has high accuracy and good convergence, which turns out to be a proper way for the parameter optimization of the inerter system.
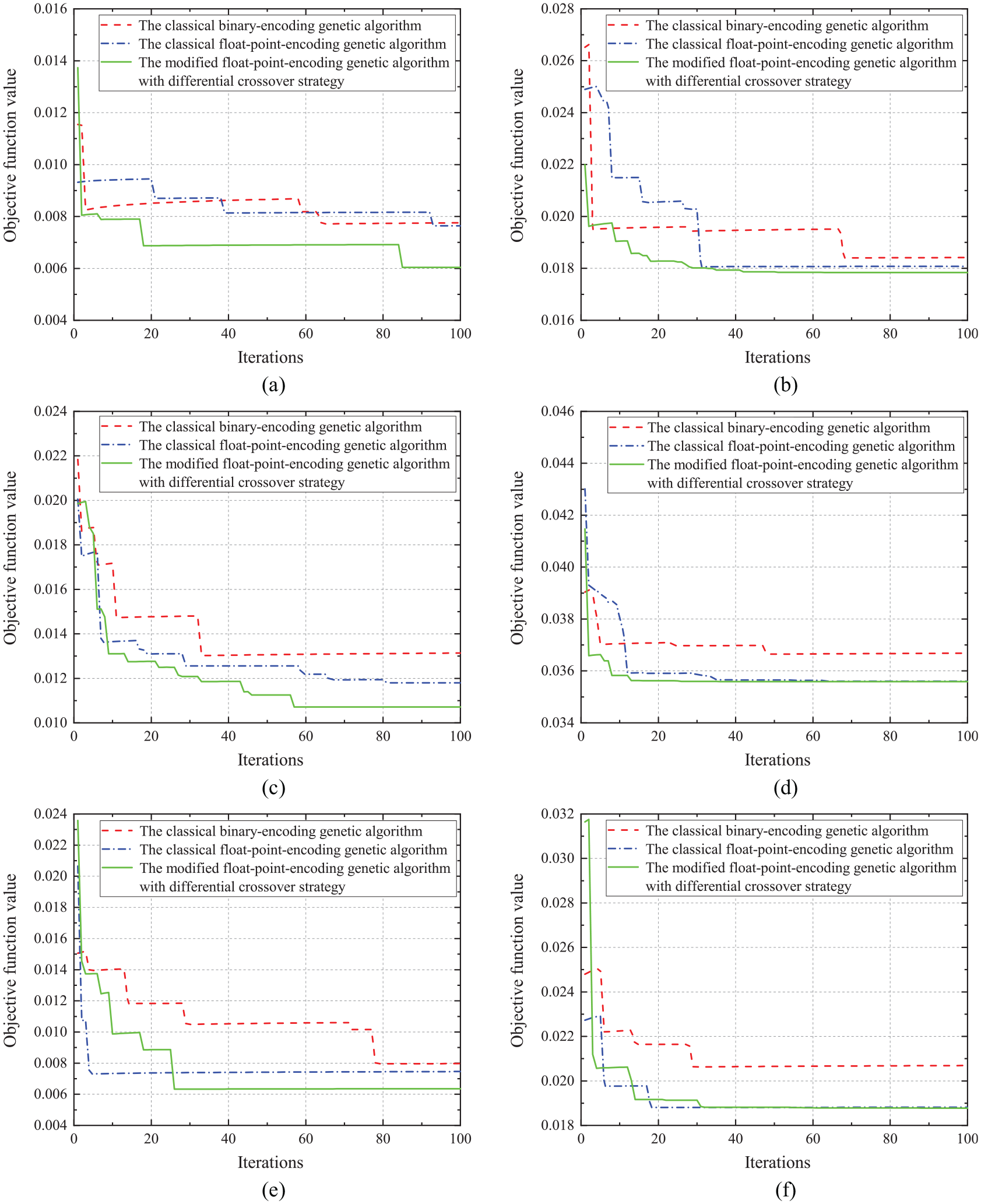
The convergence curves of different genetic algorithms: (a) design case 1, (b) design case 2, (c) design case 3, (d) design case 4, (e) design case 5, and (f) design case 6.
A parametric study is carried out to explore the rationality of the parameters obtained by the modified genetic algorithm with differential crossover strategy. For every studied case, the nominal damping ratio

The three-dimensional isosurface plots of the damping deformation enhancement factor of an SDOF structure with inerter system: (a) design case 1, (b) design case 2, (c) design case 3, (d) design case 4, (e) design case 5, and (f) design case 6.
Design case 2 is selected as the example to statistically verify the advantage of the modified genetic algorithm over the classical genetic algorithms, as shown in Figure 8. The selected design case is solved 100 times by each of the three algorithms respectively. The solved parameters in Table 3 are regarded the criterions to check if the solution is converged. The relative converge tolerances of the objective function are chosen as 5%, 2%, 1%, and 0.5%, and the counts of iterations for convergence are recorded during each solution. The maximum number of iterations was set to 1000. The results are shown in Table 4 and Figure 8. Among the three algorithms, the classical binary-encoding genetic algorithm seldomly converges within 1000 iterations. The classical float-point-encoding genetic algorithm performs better, but the average counts of iterations at convergence are significantly larger than that of the modified genetic algorithm and the difference is getting larger as the converge tolerance decreases. The values of consumed time for the three algorithms are listed in Table 5, and it can be found that the consumed time of the modified genetic algorithm is obviously lower than the other algorithms, which indicates the high efficiency of the modified algorithm.

The convergence efficiency of different genetic algorithms: (a) relative converge tolerance 5%, (b) relative converge tolerance 2%, (c) relative converge tolerance 1%, and (d) relative converge tolerance 0.5%.
Mean and standard deviation of the count of iterations at convergence for different algorithms.

Since the classical binary-encoding genetic algorithm did not converge in most solutions, the standard deviations have no meanings.
Average time consumed for different algorithms.

“>” Indicates that during the 100 solutions, there are one or more non-convergence solutions.
Seismic damping effect of optimized inerter system
By applying the key parameters obtained by the modified genetic algorithm with differential crossover strategy into Equation (6), the frequency-domain transfer function curves of the displacement response of the SDOF structure with the inerter system can be drawn in Figure 9 for the six design cases in Table 3. From the frequency-domain transfer function curves, it can be found that the optimization design based on the damping enhancement effect of the inerter system can effectively play the tuning role and effectively suppress the resonant peak response of the main structure.

Frequency-domain transfer function curve of SDOF structure with inerter system.
Considering seismic excitations with different spectral characteristics (i.e. white-noise excitation, artificial seismic excitation, 63 natural seismic excitation), the seismic response of the designed structure with the inerter system is analyzed. Here, design case 2 is chosen as the example. The time history responses under different excitations are provided in Figure 10. It can be found that the displacement response of the SDOF structure with the inerter system is smaller than the original structure under different excitations, and the root-mean-square response mitigation ratios are almost identical to the preset target response mitigation ratio. This indicates that the designed inerter system is effective for suppressing the structural response.

Seismic displacement response under different excitations (design case 2,
To demonstrate the damping enhancement effect of the inerter system more intuitively, an SDOF structure is equipped with an inerter system (under design case 2) and a single conventional viscous damper (they have the same viscous damping coefficient) and it is analyzed under seismic excitations. The hysteretic curves of the inerter system and the damper can be seen in Figure 11. It can be found that the damping element in the inerter system can undergo greater deformation and damping force than a single conventional viscous damper. Consequently, the hysteresis area of the damping element in the inerter system is significantly larger than that of a single conventional viscous damper, which means that the inerter system can dissipate more input energy.
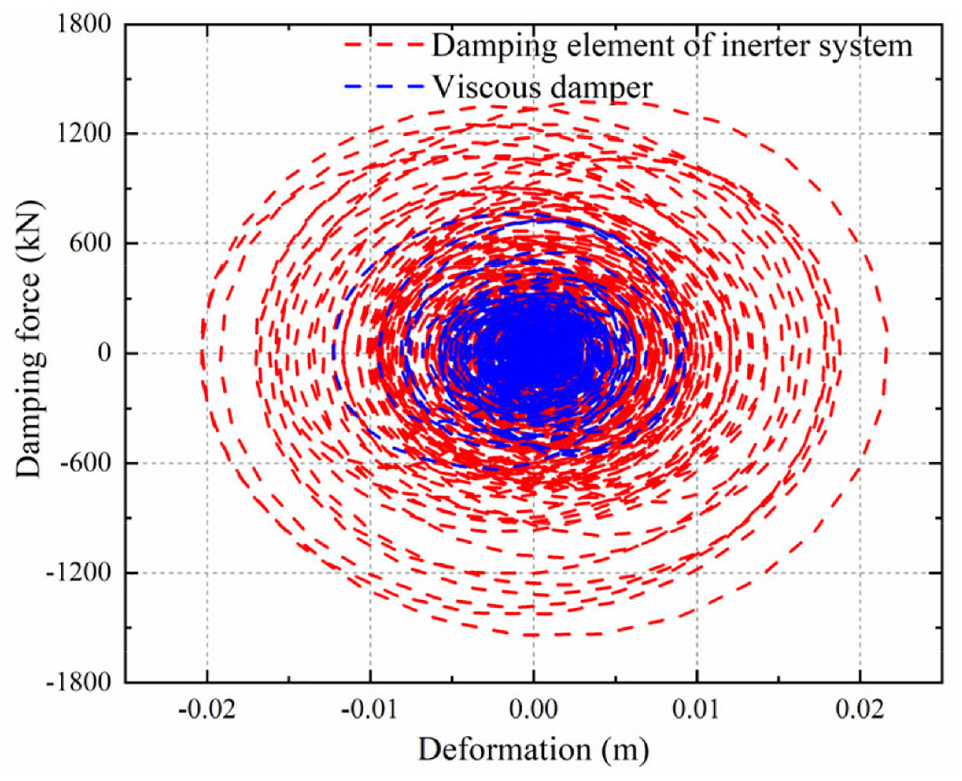
Hysteresis curve of the damping element in the inerter system and a viscous damper (under design case 2).
Conclusions
A modified genetic algorithm with differential crossover strategy was proposed to optimize the inerter system in order to maximize the damping enhancement effect of the inerter system under the performance-oriented design concept. The following conclusions can be drawn:
The modified genetic algorithm can avoid tedious mathematical derivation of structural stochastic mean-square responses in solving the design parameters of the SDOF structure with an inerter system. The proposed algorithm thus provides a new approach to solve the performance-oriented optimization problem of the inerter system with higher usability.
The differential crossover strategy makes the modified genetic algorithm have a better global convergence ability with respect to the classical genetic algorithms.
The inerter system optimized by the modified genetic algorithm can reduce the response of the structure under seismic excitations effectively and purposefully.
The design method investigated in this study is only applied to an SDOF structure with a specified type of inerter system. However, whether the modified genetic algorithm with differential crossover strategy can be applied to other types of inerter system or multi-degree-of-freedom structures with inerter systems needs to be further investigated. The other metaheuristic algorithms should also be investigated to enhance the solution efficiency of the optimization problems of inerter systems.
Footnotes
Acknowledgements
The authors would like to thank State Key Laboratory of Mechanical Behavior and System Safety of Traffic Engineering Structures, Shijiazhuang Tiedao University for supporting us in publishing our research.
Handling Editor: Chenhui Liang
Author contributions
Conceptualization, C.P.; methodology, C.P.; software, C.P.; validation, C.P.; formal analysis, C.P. and D.Y.; investigation, H.W.; resources, H.W.; data curation, D.Y.; writing – original draft preparation, D.Y.; writing – review and editing, C.P.; visualization, D.Y.; supervision, C.P.; project administration, C.P.; funding acquisition, C.P. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Foundation of State Key Laboratory of Mechanical Behavior and System Safety of Traffic Engineering Structures, Shijiazhuang Tiedao University, grant number KF2020-13, and the project for the introduction of overseas students in Hebei Province (CN), grant number C20190364.