
Abstract
Garment pressure measurement is essential for evaluating comfort, fit quality, and physiological function in both everyday clothing and specialized garments. The AMI-3037 pneumatic sensor has served as the reference standard for nearly three decades, but its high channel cost, time-consuming per-channel calibration, and temperature-dependent drift have limited broader adoption. This study introduces a Hall effect-based pressure sensor utilizing an integrated dome–annular magneto-elastomer architecture designed to overcome these constraints. The deformable magnetic composite modulates magnetic flux under applied pressure, eliminating the rigid-magnet dependency of conventional Hall-based designs. Finite element simulations confirmed that the dome–annular structure produces a stable, predominantly axial magnetic field that varies linearly with deformation, enabling predictable single-axis Hall transduction. Mechanical characterization demonstrated minimal hysteresis, high repeatability, and strong sensitivity within the garment-relevant low-pressure range. Mannequin testing across three compression-garment sizes and four curved anatomical sites showed that the sensor achieves measurement accuracy statistically equivalent to the AMI-3037 reference. The sensor maintains a 4 mm thickness profile matching the AMI-3037 form factor while offering substantial advantages: low-cost fabrication, reduced susceptibility to temperature-related pneumatic drift, conformability to curved surfaces, and elimination of repeated pre-experimental calibration. These characteristics enable practical multi-site pressure assessment previously infeasible with pneumatic systems. The sensor provides a rigorously validated alternative to pneumatic standards and establishes a foundation for next-generation garment pressure measurement in research, clinical, and industrial applications.
Keywords
Introduction
Garment pressure—the mechanical force exerted by clothing on the human body—has long been recognized as a critical determinant of wearability, comfort, and physiological function. In both everyday clothing and specialized garments such as compression wear, sportswear, and wearable robotics, pressure distribution influences circulation, muscle activity, and thermoregulation. 1 Excessive or uneven pressure can compromise comfort, restrict movement, and induce tissue stress.2,3 Accurate measurement is therefore essential for evaluating and optimizing garment performance.
Existing garment pressure assessment techniques fall into two broad categories: indirect estimation and direct sensing. Indirect methods—including strain-based finite element analysis, three-dimensional body scanning, and computational modeling—offer non-invasive assessment with considerable computational flexibility.4 –6 However, the nonlinear and anisotropic mechanical behavior of textiles, combined with individual variations in body morphology, severely limits their reliability under practical garment-wearing conditions. These approaches therefore remain largely confined to theoretical applications and are seldom used in real-world garment evaluation.
Direct sensing has established itself as the practical standard for obtaining localized, real-time interface pressure measurements. The AMI-3037 pneumatic sensor, introduced in the late 1990s, has served as the reference instrument for garment-pressure assessment for nearly three decades. 7 The system operates by positioning a 4 mm air-filled bladder between the garment and skin surface. External pressure compresses the internal air volume, generating a proportional signal transmitted to a pressure transducer. Its exceptional sensitivity and excellent conformability to curved anatomical surfaces have established it as the gold standard in the field.
Despite its proven accuracy, the AMI-3037 exhibits several limitations that restrict its broader adoption. First, each measurement channel requires time-consuming pre-experimental calibration, and operator-dependent procedural variability compromises measurement reproducibility. Second, the high cost—approximately 15,000 USD per channel—makes multi-point simultaneous measurement and large-scale studies economically impractical. Third, the pneumatic mechanism exhibits inherent sensitivity to ambient temperature due to thermal gas expansion, necessitating strict environmental control to maintain measurement fidelity. Nevertheless, the AMI-3037 remains the de facto reference standard. This persistence reflects not operational suitability, but rather the absence of alternative sensors offering comparable accuracy and reliability.
A broad range of studies has investigated alternative sensing platforms, including textile-integrated piezoresistive, piezoelectric, and capacitive sensors, optical-fiber systems, and laser-engraved conductive textiles.8 –11 Although these approaches offer thin, flexible, and garment-compatible architectures, they commonly suffer from hysteresis, baseline drift, curvature sensitivity, and reduced reliability under low-pressure conditions.12,13 Commercial force-sensing resistors (FSRs) have also been widely used as low-cost alternatives.14 –16 Their ultra-thin profiles function adequately only in high-compression applications where continuous fabric–skin contact is maintained, as they fundamentally require uninterrupted surface coupling. Small air gaps or dynamic garment motion frequently generate unstable, intermittent, or absent measurements. To date, no pneumatic-free sensing technology has combined the accuracy, stability, environmental robustness, and practical reliability needed to replace the AMI-3037. The field continues to demand a sensor system that is low-cost, highly accurate, free from temperature-dependent gas-expansion effects, and free from calibration and environmental control burdens.
This study addresses this gap by proposing a Hall effect-based pressure sensor using a dome–annular magneto-elastomer architecture. The sensor aims to achieve the measurement fidelity of pneumatic systems while eliminating their practical limitations. Specifically, this work pursues three objectives:
Develop a soft, deformable pressure sensor using a dome–annular magnetic architecture that addresses the limitations of rigid-magnet Hall configurations.
Characterize the sensor’s mechanical–magnetic transduction and demonstrate linear, low-hysteresis, and repeatable pressure response within the garment-relevant range (0–30 kPa).
Evaluate sensor performance under garment-wear conditions and verify accuracy comparable to the AMI-3037 across multiple curved anatomical sites.
By integrating the measurement fidelity of pneumatic sensing with the practical advantages of soft-material engineering, this work introduces a garment-compatible pressure sensor with the potential to redefine measurement standards in the field. The platform combines the accuracy of the AMI-3037 with lower cost, elimination of calibration requirements, and a solid-state sensing mechanism inherently less susceptible to temperature-induced gas expansion effects than pneumatic systems. This study provides a rigorously validated alternative that can enable widespread adoption of reliable garment-pressure quantification in research, clinical, and industrial applications.
Sensor design and working principle
Hall effect sensing principle
The Hall effect describes the generation of a transverse voltage when an electric current flows through a conductor subjected to a perpendicular magnetic field (Figure 1). 17 Because the resulting Hall voltage varies proportionally with magnetic flux density, Hall effect sensors are widely used for displacement and pressure transduction, where mechanical deformation modifies the magnetic field experienced by the sensing element. 18

Operating principle of the Hall effect.
Conventional Hall effect-based pressure sensors typically employ a rigid permanent magnet paired with a Hall effect sensor. 19 When an external load induces a small displacement between the magnet and the Hall effect sensor, the gap-dependent change in magnetic flux produces a corresponding change in Hall voltage (Figure 2). This configuration offers advantages over resistive and pneumatic transduction methods, including solid-state thermal robustness, low power consumption, simple calibration, and compatibility with compact, lightweight architectures.

Operating principle of conventional rigid-magnet Hall-effect pressure sensing.
Limitations of conventional rigid-magnet configurations
Rigid-magnet Hall effect configurations exhibit several limitations when applied to garment–body interface pressure measurement. The magnetic field detected by the Hall effect sensor is highly sensitive not only to axial displacement but also to magnet tilt, shear motion, and in-plane misalignment. Even minor angular deviations can distort the magnetic flux path, producing substantial signal fluctuations unrelated to actual pressure changes. Furthermore, rigid magnets couple poorly to curved and compliant anatomical surfaces, where maintaining stable alignment between the magnet and Hall effect sensor is mechanically difficult. These characteristics make conventional rigid Hall structures unsuitable for the low-pressure, spatially varying, and curvature-dependent conditions typical of garment environments.
Proposed dome–annular soft magnetic architecture
To overcome the alignment sensitivity and geometric rigidity inherent to conventional configurations, the pressure sensor adopts an integrated dome–annular architecture fabricated entirely from a deformable magneto-elastomer composite. This composite replaces the discrete permanent magnet, reducing tilt, shear, and micro misalignment artifacts that otherwise introduce large flux variations in wearable environments. Figure 3 illustrates the cross-sectional structure of this dome–annular magnetic architecture and its integration with the underlying Hall effect sensor.

Cross-sectional schematic of the dome–annular magneto-elastomer Hall effect–based pressure sensor.
The magneto-elastomer is molded into a dome-shaped structure that defines the overall mechanical response. The dome geometry governs load transmission from the garment by establishing three essential functions. The curved upper surface promotes stable contact with the fabric layer, reducing tilt and uneven loading even when garment tension varies across curved anatomical regions. The geometry guides deformation predominantly along the axial direction, supporting predictable and repeatable coupling between applied pressure and magnetic flux change. Additionally, the dome concentrates indentation toward its apex, enabling reliable response under low-pressure conditions characteristic of everyday clothing, consistent with prior reports that dome-shaped structures enhance sensitivity and contact stability on curved, compliant surfaces. 20
Embedded within the dome is an annular (ring-shaped) internal cavity that defines the magnetic flux distribution. The ring geometry suppresses lateral flux spreading and promotes a predominantly axial magnetic field aligned with the Hall effect sensor’s sensitive axis. 21 Axially magnetized ring structures have been shown to minimize radial field components and improve field uniformity across the sensing region. This flux-shaping enhances signal linearity, reduces noise arising from minor garment shifts, and prevents distortion that would otherwise occur if the magnetic field were allowed to disperse radially.
Magnetic–mechanical transduction mechanism
The integrated dome–annular architecture functions as a coupled mechanical–magnetic transduction system. When an external load is applied to the dome surface, the composite undergoes localized axial compression while the surrounding annular structure stabilizes lateral expansion. This deformation redistributes the internal magnetic field, increasing the magnetic flux density directed toward the Hall effect sensor positioned beneath the dome’s central axis. The Hall voltage therefore changes monotonically with applied pressure, following the transduction pathway:
(1) Applied garment pressure → (2) Axial dome deformation → (3) Magnetic flux redistribution (ΔB) → (4) Hall voltage modulation
Because magnetic flux is modulated internally within the deformable composite—rather than through relative displacement of a rigid magnet—the mechanism remains robust under the low-pressure, curvature-dependent garment conditions tested. This internal flux modulation eliminates the geometric discontinuities and alignment sensitivity inherent to rigid-magnet configurations.
Methods
Sensor fabrication
The proposed pressure sensor was fabricated using a magneto-elastomer composite engineered to serve as a deformable magnetic source for Hall effect transduction (Figure 4). First, a two-part platinum-cured silicone elastomer (Dragon Skin 10, Smooth-On Inc., 100% modulus: 152 kPa) was mixed at a 1:1 ratio and combined with NdFeB magnetic powder (average particle size 50–75 µm) at a 1:1 weight ratio (Figure 4(a)). The mixture was homogenized using a planetary centrifugal mixer and subsequently degassed under vacuum to remove entrapped air.
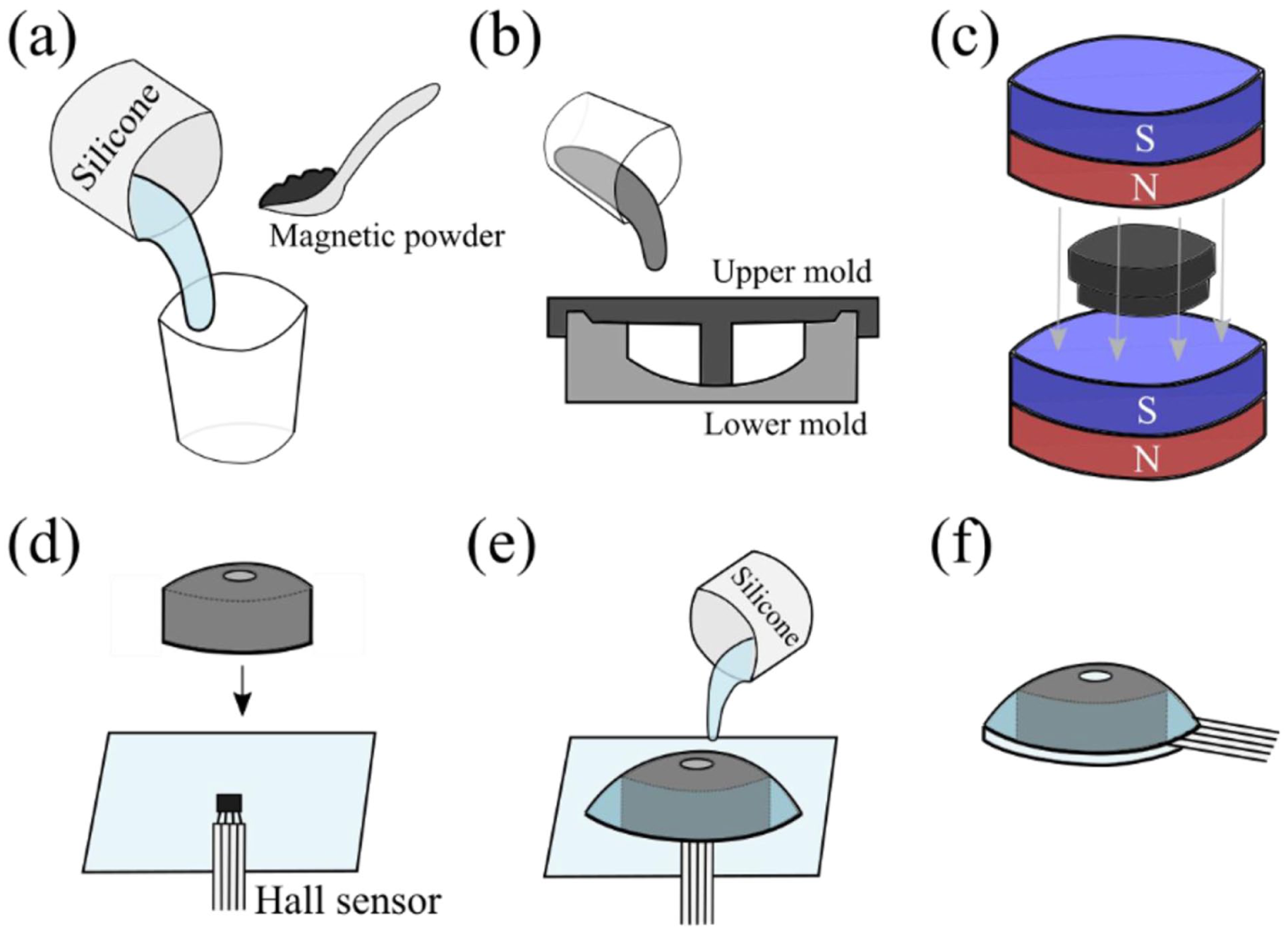
Fabrication process of the dome-shaped Hall effect-based pressure sensor: (a) preparation of the soft magnetic composite by mixing silicone and NdFeB powder (1:1:1, w/w), followed by degassing, (b) casting into a 3D-printed dome-shaped mold (Objet30, Stratasys Inc.), (c) magnetization during curing between two NdFeB block magnets (0.5 T, 60°C, 1 h), (d) formation of a thin silicone base and mounting of the Hall effect sensor (DRV5055A3) pre-soldered to an FFC, (e) assembly of the dome and encapsulation with silicone, cured at 60°C for 30 min, and (f) completed prototype (~4 mm thickness) conformable to curved surfaces.
The composite was then cast into a 3D-printed dome-shaped mold featuring an internal annular cavity (Figure 4(b)). To induce uniaxial magnetic alignment consistent with the sensor’s axial deformation direction, the mold was positioned between two NdFeB block magnets (surface field ≈ 0.5 T) during curing and heated at 60°C for 1 h (Figure 4(c)). This process imparted a predominantly axial magnetization profile to the dome–annular composite.
Following curing, a thin silicone base layer was prepared, and a uniaxial Hall effect sensor (DRV5055A3, Texas Instruments) pre-soldered to a flexible flat cable was mounted at the geometric center of the base. The magnetized dome was then aligned above the Hall sensor and bonded to the base using uncured silicone, ensuring consistent spacing and mechanical integration (Figure 4(d)). A final silicone encapsulation layer was applied and cured at 60°C for 30 min to enhance durability and protect the assembly during repeated loading cycles (Figure 4(e)).
The completed prototype exhibits sufficient compliance to conform to curved anatomical surfaces while preserving the designed dome–annular magnetic architecture (Figure 4(f)). The total assembled thickness was maintained at approximately 4 mm to mirror the profile of the AMI-3037 reference sensor. Matching this established form factor facilitates equivalent garment–sensor interaction during benchmarking experiments and preserves realistic coupling conditions for clothing applications.
Data acquisition and signal processing system
A custom data acquisition system was configured to convert Hall voltage changes into digital pressure readings (Figure 5). The pressure sensor output was first routed through an ADS1118 16 b analog-to-digital converter, selected for its high resolution and low input-referred noise. The converter communicated with an Arduino UNO microcontroller via an SPI interface. The sampling rate was set to 50 Hz, sufficient to capture quasi-static and low-frequency garment pressure variations.
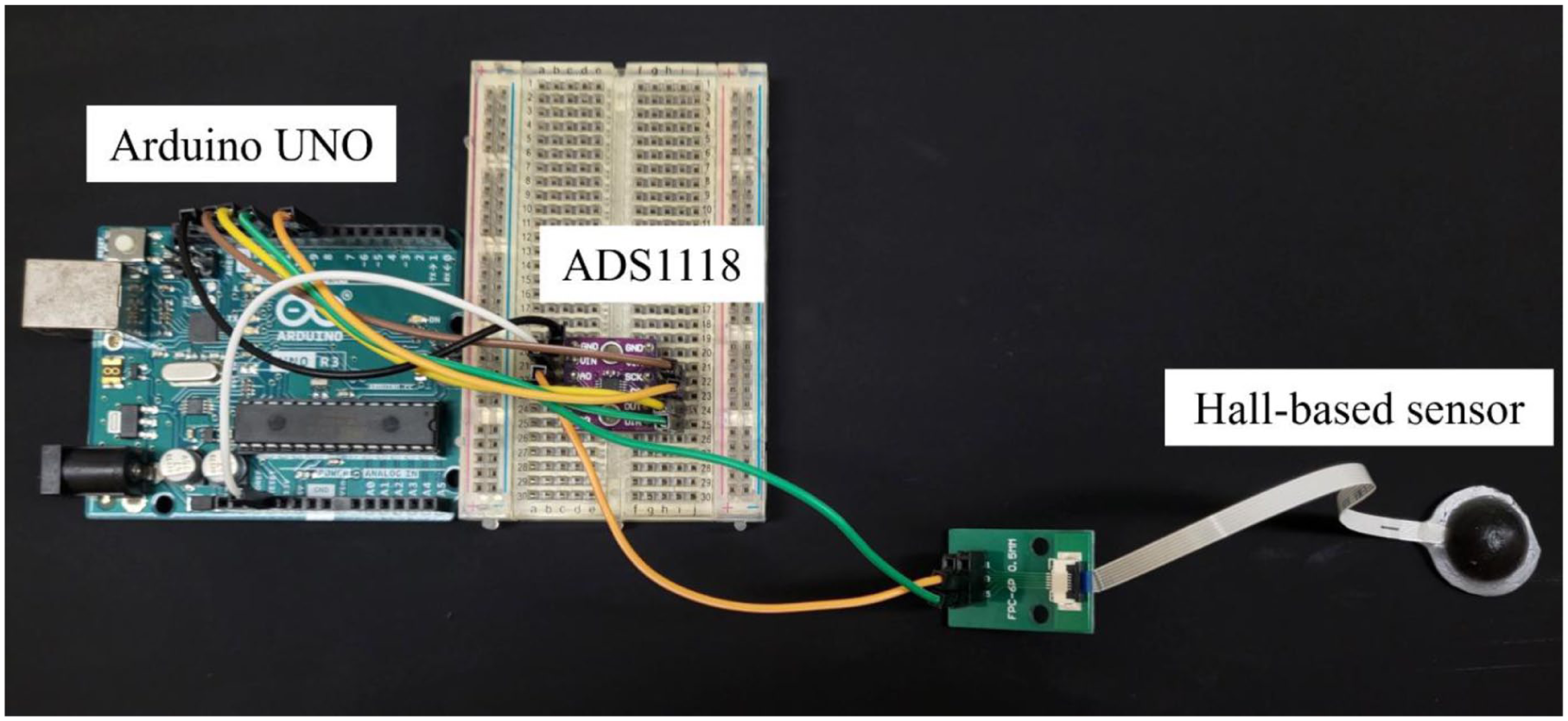
Data acquisition system for the Hall effect-based pressure sensors.
During calibration, a polynomial mapping between Hall voltage and applied pressure was derived using controlled mechanical loading. For the subsequent experiments, this calibration model was applied to convert real-time voltage readings into pressure estimates.
Experimental evaluation procedures
Finite element magnetic simulation
We conducted finite element analysis using COMSOL Multiphysics to model the magnetic flux distribution of the proposed sensor. The simulation reproduced the sensor geometry, in which a ring-shaped magneto-elastomer was embedded within a dome-shaped elastomer structure. The composite was assumed to be uniformly magnetized with axial magnetization consistent with the annular geometry. A uniformly distributed compressive load (0–30 kPa) was applied to the dome surface to mimic garment-induced pressure. Magnetic flux density (B field) was computed along the vertical axis at the Hall sensor position. The ring-shaped architecture produced a concentrated axial flux gradient, validating the pressure sensor’s uniaxial operational assumption.
Standardized laboratory pressure validation
To establish the intrinsic pressure–response behavior of the fabricated sensors under controlled laboratory conditions, standardized bench-top compression tests were conducted. A motorized tensile/compression tester (ESM303, Mark-10, USA) equipped with a calibrated force gage (Series 7, Mark-10) was used to apply normal compressive loads to the dome surface. A flat circular indenter with a diameter of 9 mm was attached to the force gage to ensure uniform load distribution over a defined contact area.
Applied pressure was calculated from the measured force divided by the circular indenter contact area (
Each sensor underwent seven consecutive loading–unloading cycles up to 37.73 kPa. The indenter was driven at a displacement rate of 0.5 mm/s, corresponding to quasi-static deformation conditions intended to minimize dynamic artifacts and ensure uniform stress transfer to the dome structure. No dwell time was introduced between loading and unloading phases to replicate continuous garment pressure under quasi-static mechanical conditions.
The Hall voltage output of the proposed sensor was recorded simultaneously using the 16 b ADC data acquisition system. A total of four independently fabricated sensor units (N = 4) were evaluated to assess device-to-device variability, mechanical repeatability, and stability of the magnetic–mechanical transduction mechanism. This standardized laboratory procedure established baseline mechanical performance under controlled loading conditions prior to subsequent mannequin-based experiments.
Mannequin experiments and benchmarking against AMI-3037
To enable direct comparison with the current field standard, we performed mannequin-based experiments using both the proposed pressure sensors and a commercial AMI-3037 pneumatic sensor (AMI Techno, Japan). Compression leggings in three commercially available sizes (4, 6, and 8; composition: 78% nylon, 22% polyurethane) were fitted to a full-scale mannequin. For each size, four sensing sites were instrumented on the posterior lower body—the gluteal region, upper posterior thigh, popliteal fossa (slightly offset from the crease), and distal posterior calf near the ankle—yielding 12 paired measurements across size–site combinations. These anatomical sites were chosen to avoid bony prominences, minimize motion artifacts, and capture regions known to experience meaningful interface loads under compression garments.
All measurements were conducted in a controlled laboratory environment at 22°C ± 0.5°C and 20% ± 1% relative humidity. For each size–site condition, interface pressure was recorded for 90 s while the mannequin remained in a static standing posture. The initial 30 s were discarded to allow signal stabilization, and the subsequent 60 s of data were averaged. Each condition was repeated three times, and the three averages were used to obtain a stable per-site pressure value for analysis. Figure 6 illustrates the four measurement sites on the posterior lower body and the experimental setup for both sensor types.

Measurement sites and experimental setup for calibration experiments: (a) anatomical schematic illustrating the four posterior sensing sites: ① gluteal region, ② upper posterior thigh, ③ popliteal fossa (slightly offset from the crease), and ④ distal posterior calf near the ankle, (b) mannequin fitted with compression leggings and instrumented with the proposed Hall effect-based pressure sensors at the designated sites, and (c) corresponding setup using the AMI-3037 pneumatic sensors for reference measurement.
Raw outputs from the proposed sensors were converted to estimated pressure values in millimeters of mercury (mmHg) using per-site linear regression against the corresponding AMI-3037 readings. For each channel i, the calibration function was defined as

where
Bench compression tests report pressure in kilopascals (kPa), whereas mannequin experiments use mmHg, following common practice in medical and garment-pressure research. A conversion factor of 1 kPa ≈ 7.5 mmHg was used when cross-referencing results between the two domains.
Results and discussion
Magnetic flux distribution and deformation response
We performed finite element magnetic analysis to examine how the integrated dome–annular magneto-elastomer architecture modulates magnetic flux under pressure. Figure 7 depicts the simulated magnetic field distribution in the unloaded state and under a representative loading condition.

Simulated magnetic flux distribution of the proposed dome-shaped Hall effect-based pressure sensor: (a) unloaded condition and (b) 30 kPa compressive load.
In the absence of external pressure, the magnetic composite generated a symmetric, predominantly axial flux pattern concentrated along the central axis where the Hall element is located (Figure 7(a)). Under an applied deformation corresponding to approximately 30 kPa of garment-relevant pressure, the flux density intensified while preserving its uniaxial alignment (Figure 7(b)). This behavior confirms that the annular cavity effectively suppresses lateral flux dispersion and stabilizes directional alignment even during deformation.
Finite element simulation results showed that the magnetic flux density at the sensing element position increased near-linearly with applied pressure across the 0–30 kPa range (Figure 8). This linear trend validates the design rationale that the dome-guided axial deformation and ring-shaped flux architecture together produce predictable and monotonic magnetic modulation. The simulated linearity further indicates that the sensor is inherently suited to the low-to-moderate pressure levels characteristic of garment–body interface loading, where high sensitivity to small pressure changes is essential.

Simulated magnetic flux density response of the proposed sensor under applied pressure (0–30 kPa).
These simulation results confirm that the geometric and magnetic design choices—soft magneto-elastomer, dome topology, and internal annular architecture—produce a deformation mode and flux response that directly support accurate single-axis Hall effect-based pressure transduction.
Mechanical response and cyclic loading performance
We conducted mechanical compression experiments to evaluate whether the fabricated sensors exhibit the performance characteristics predicted by simulation. Figure 9 presents the pressure–response characteristics of four independently fabricated sensors, expressed as raw digital output (ADC counts), during seven cyclic loading–unloading trials.

Raw digital output (ADC counts) of four fabricated Hall effect-based pressure sensors under cyclic loading (0–37.7 kPa).
Across sensors, the raw digital output increased nearly linearly with applied pressure up to 37.7 kPa, demonstrating strong agreement with simulated magnetic behavior. The pressure–response relationship within the physiologically and garment-relevant range (<40 kPa) showed high sensitivity and minimal deviation, indicating that the dome geometry consistently directed deformation toward the Hall element.
Minor inter-device variation observed in Figure 9 is attributed to fabrication-related tolerances. These include slight differences in magnetic particle dispersion within the silicone matrix, small variations in axial magnetization alignment during curing, and micrometer-scale differences in the spacing between the magneto-elastomer dome and the Hall element. Because magnetic flux intensity is highly sensitive to geometric and magnetization parameters, even minimal deviations can produce observable baseline offsets or modest sensitivity differences across devices.
Importantly, these variations did not compromise linearity or cyclic stability. Hysteresis across cycles was minimal, and no measurable drift or mechanical degradation was observed over repeated loading. This stability is attributed to the elastomeric encapsulation and the inherently continuous coupling between the dome-shaped magneto-elastomer and the sensing substrate. These characteristics ensure that the transduction mechanism—flux redistribution driven by deformation—remains consistent during cyclic operation, a critical requirement for long-term garment-pressure assessment.
These mechanical results confirm that the integrated dome–annular structure not only delivers predictable magnetic modulation but also maintains the resilience, linearity, and repeatability necessary for practical use in garment environments.
Comparison with the AMI-3037 reference under garment loading
We compared the proposed pressure sensor and AMI-3037 across three garment sizes and four posterior lower-limb sites. Raw Hall outputs were converted to mmHg using per-site linear regression mappings derived from AMI-3037 values. Table 1 summarizes the converted pressure readings and the AMI-3037 references across all conditions. Agreement between the two systems was strong, with per-site deviations within ±0.93 mmHg and a pooled correlation of r = 0.98. The mean bias was effectively zero (+0.00 mmHg), and 95% limits of agreement ranged from −0.75 to +0.75 mmHg. Root-mean-square error values averaged 0.38 mmHg across sites, well below the clinically and garment-relevant pressure threshold (<15 mmHg).
Comparison of AMI-3037 reference pressures and Hall-derived pressures across three garment sizes and four posterior lower-limb sites.

Sites: (1) gluteal region, (2) upper posterior thigh, (3) popliteal fossa, and (4) distal posterior calf near the ankle.
Figure 10 shows the scatter plot and Bland–Altman analysis. The scatter plot demonstrates near-unity correspondence between the two sensors, while the Bland–Altman analysis confirms the absence of systematic bias and the narrow distribution of errors. These results demonstrate that the proposed pressure sensor achieves measurement accuracy comparable to the AMI-3037 while offering enhanced scalability, reduced cost, and elimination of pneumatic gas-expansion effects. This validates the sensor’s suitability as a practical alternative for multi-site or distributed garment-pressure monitoring applications.

Comparison of Hall-based sensor and AMI-3037 reference: (a) scatter plot of Hall-derived pressures versus AMI-3037 reference values across three sizes and four sites (N = 12), and (b) Bland–Altman plot illustrating mean bias (+0.00 mmHg) and 95% limits of agreement (−0.75– +0.75 mmHg).
Conclusion
This study presents a Hall effect-based pressure sensor that achieves measurement accuracy highly comparable to the AMI-3037 pneumatic standard while eliminating its fundamental limitations. Across three compression garment sizes and four curved anatomical sites, the sensor exhibited negligible bias, an RMSE below 1 mmHg, and a correlation of r = 0.98 with AMI-3037 reference measurements. These results demonstrate that the sensor provides a rigorously validated alternative to pneumatic instrumentation for garment-pressure assessment.
The sensor integrates a dome–annular magneto-elastomer architecture that fundamentally differs from conventional rigid-magnet Hall configurations. The deformable magnetic composite eliminates tilt, shear, and alignment instability on curved surfaces, while the annular geometry establishes a predominantly axial flux path that varies linearly with applied pressure. Finite element simulations and mechanical testing across the 0–30 kPa garment-relevant range confirmed minimal hysteresis, excellent repeatability, and stable performance under low-pressure, spatially varying garment conditions. This architecture enables Hall effect sensing in soft, conformable, and curvature-compatible configurations previously incompatible with rigid designs.
The practical implications are substantial. The AMI-3037 has remained the field standard for nearly three decades primarily due to the absence of alternatives offering comparable accuracy. Its high per-channel cost, time-consuming calibration, and temperature sensitivity have restricted garment-pressure research to controlled laboratory settings with limited measurement points. The proposed sensor addresses these constraints through low-cost fabrication, elimination of repeated pre-experimental calibration, and solid-state transduction that avoids temperature-dependent gas expansion effects inherent to pneumatic systems. The integrated Hall element (DRV5055A3) operates within −40°C to 125°C, 22 and the magneto-elastomer structure is compatible with typical indoor garment-use temperature conditions. Although dedicated environmental chamber testing was not conducted in this study, future work will include systematic thermal characterization under controlled temperature variation.
The sensing element and data acquisition electronics can be integrated into a compact industry-ready module through miniaturized PCB design and embedded signal processing, consolidating the Hall element, 16 b ADC, and microcontroller into a unified unit. Manufacturing standardization—including automated magnetic particle mixing, controlled magnetization alignment, and precision spacing control—can further reduce inter-device variability and support scalable industrial production.
Critically, the Hall effect-based approach provides stable static-pressure measurement—a requirement often overlooked in garment-pressure research. Unlike piezoelectric and triboelectric sensors that cannot sustain static readings, or piezoresistive sensors prone to baseline drift, Hall effect transduction maintains accuracy under sustained loading. This static fidelity distinguishes the proposed sensor from textile-integrated alternatives and directly supports applications requiring prolonged pressure monitoring.
Such capability expands practical measurement possibilities across multiple domains. In compression therapy, accurate multi-site pressure verification is essential for therapeutic efficacy yet has remained impractical with pneumatic instrumentation. In athletic garment design, simultaneous multi-point assessment enables detailed characterization of pressure distribution to inform evidence-based fit optimization. For load-bearing wearable systems—including exoskeletons, prosthetic interfaces, and occupational harnesses—distributed pressure monitoring can mitigate localized tissue stress and enhance long-term user comfort.
More broadly, by demonstrating that magnetic flux can be modulated through controlled deformation of a compliant magnetic composite rather than rigid-body displacement, this work establishes a soft magnetic transduction strategy adaptable to textile interfaces, flexible substrates, and intimate body-contact systems. By delivering pneumatic-equivalent accuracy without pneumatic-associated operational constraints, the proposed platform enables scalable, distributed pressure measurement across research, clinical, and industrial contexts.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Global – Learning & Academic research Institution for Master’s · PhD Students, and Postdocs(G-LAMP) Program of the National Research Foundation of Korea(NRF) grant funded by the Ministry of Education(No. RS-2025-25442707) and by the National Research Foundation of Korea(NRF) grant funded by the Korean Government(MSIP; RS-2023-00208052).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.