
Abstract
A Kevlar tether usually exhibits strong nonlinearity in engineering applications, bringing new challenges to the modeling of tether dynamics. The nonlinear mechanical behaviors, including creep behavior, nonlinear stiffness, hysteresis effect, and dynamical property of a Kevlar tether, are investigated through a series of experiments. The longitudinal loading experiment setup is established, from which the relationships between tether deformation, tension, and time can be obtained. The creep process of Kevlar tethers is divided into three stages, namely, linear creep stage, deceleration creep stage, and long-term creep stage. This paper studied the longitudinal nonlinear stiffness of a Kevlar tether, whose nonlinearity is fitted by the cubic function model. The hysteresis effect under single loading and unloading is fitted well by the Kawabata stress-strain model, which verifies the correctness and validity of Kawabata model. The nonlinear dynamical model, which includes the elastic force, hysteresis force, and damping force, is established to describe the general dynamical property of the Kevlar tether. The experiment results verify the correctness of the dynamical model form. To simplify the analysis, a simplified model is proposed to describe the dynamical property of the Kevlar tether, and the parameters have a good consistency. The works in this paper contribute to the accurate modeling of flexible tether and lay the foundation for the further research of tether dynamics and control.
Keywords
Introduction
A flexible tether is extensively utilized in engineering applications as hoisting systems,1,2 elevator systems, 3 cable bridges,4,5 ships,6,7 and space capturing systems.8,9 Usually constructed from high strength aramid fibers, these flexible fibers serve to transmit forces and play an important role in the dynamics and control of corresponding systems. Currently, the mechanical properties of tether are commonly described with a simplified linear spring-damping model,10,11 which is unable to reflect practical properties of tether such as creep, hysteresis, plasticity, and other nonlinearities. These nonlinearities deteriorate the precision and efficiency of force transmission for tethered systems and limited their applications. It is generally difficult to establish an accurate theoretical model due to the complex behaviors of underlying polymer materials and the braiding styles of tether from fibers. Thus, experimental tests are frequently conducted to investigate the nonlinear mechanical properties of tether.
To simplify the analysis, the tether is usually simplified as a rigid 12 or elastic rod, 13 which is quite different from the actual behaviors of the tether. da Costa Mattos and Chimisso 14 proposed a creep model of tethers made of HMPE (high modulus polyethylene) fibers, in which an additional scalar variable related with creep-induced damage was induced. Lian et al. 15 presented a creep-rupture model from a thermodynamic point of view and used it to investigate the creep and damage behaviors of synthetic-fiber tethers for deep water mooring systems. Chailleux and Davies presented the mathematical models of nonlinear viscoelastic and viscoplastic tensile behavior of aramid yarns. It was pointed out that the yarn has nonlinear stress-strain relationship in a small deformation range, and the tensile creep law of yarns under constant stress and the positive accumulation law of plastic deformation related to maximum stress are described. 16 Liu et al. 17 considered the dynamic stiffness of synthetic-fiber tethers including polyester, aramid and HMPE for deep water mooring systems under cyclic loading, and proposed an empirical expression for dynamic stiffness, considering the mean load, the strain amplitude, and the number of loading cycles. Miyasaka et al. put forward a hysteresis model for longitudinally loaded cables in cable driven robots, which was able to represent the quasi-static response of cables with two different diameters. Furthermore, the dynamic response of the cables was captured by adding a linear damping term to the proposed model. 18 Davies et al. 19 investigated the stiffness and creep behavior of HMPE and aramid fiber tethers for deep sea handling operations. Jerry and Larry presented the experiment results which were performed to determine the low frequency longitudinal dynamics of three different Kevlar tethers. It is found that the Kevlar tether has significantly higher dynamic spring rates than static spring rates, relatively high damping for large oscillations, and extremely low damping for small oscillations. 20 Lian et al. 21 proposed a novel method for calculating the internal damping coefficient of these tethers based on the structural dynamics theory.
Kevlar, HMPE and polyester are different types of synthetic fibers, and the mechanical behaviors of tether are quite different from yarn for the same materials due to the way of weaving. Therefore, the mechanical behaviors of a Kevlar tether need to be studied separately. This paper focuses on the nonlinear mechanical behaviors of Kevlar tether used in engineering applications. A longitudinal loading experiment setup is established and a series of experiments are conducted. The nonlinear stiffness of Kevlar tethers is studied with a polynomial tension-strain curve obtained. The Kawabata stress-strain model is then used to describe the hysteresis of a Kevlar tether in loading and unloading tests. The nonlinear dynamical model, which includes the elastic force, hysteresis force and damping force is established to describe the general dynamical behaviors.
Materials and methods
The fiber usually refers to a soft slender body with a length to width ratio of more than 103 times and a thickness of several microns to hundreds of microns. It has a certain strength, elasticity, fineness, and length. Fibers can be spun into yarns either physically or mechanically. The yarns can be twisted or braided to form the tether used in engineering. Several diameters of Kevlar braided tethers are selected as the research object in this paper. The sample of braided tether with a diameter of 1.5 mm is shown in Figure 1, and the rupture tension is about 1500 N.

Kevlar braided tether sample.
To get rid of the influence of plasticity and creep, an appropriate preload is to be applied to the test tether before actual experiments. Figure 2 shows the overall longitudinal loading experiment setup, which is comprised of the platform, the tether, the load, the laser displacement sensor, the host computer, and some pulleys. The pulleys are fixed on both sides of the platform, through which tethers are passed to obtain a longer overall length. The test load is attached to the end of the tether and the other end of the tether is fixed on another side of the platform. To avoid interferences, the FT80RLA laser displacement sensor from the SensorPar company is used to accomplish the non-contact measurement of the small deformation of the tether. The displacement data can be transmitted to the host computer by its own RS485 communication interface.

Longitudinal loading experiment setup.
Creep behavior
Creep behavior refers to the situation in which the deformation of materials increases gradually with time under the action of a constant external force, which is far less than the fracture strength of the material. It significantly reduces the reliability and durability of the tether and shortens its service life greatly. The internal mechanism for creep is too complicated to be modeled by an explicit constitutive equation. Therefore, the creep behavior of a Kevlar tether is studied mainly through long-term loading test.
Firstly, longitudinal loading experiments are conducted for two tethers with a length of 16 m and diameters of 1.5 and 1.8 mm, respectively. The creep curves of the two tethers are obtained, as shown in Figure 3. It can be seen that the two creep curves are similar to each other, and the whole creep process can be divided into three stages. In the first stage, the deformation of tethers grows linearly with large growth rate and is limited to the beginning 60 min after a constant load is applied, and is usually called the linear creep stage. In the second stage, the deformation of tethers grows linearly with a slightly smaller growth rate and is also called the deceleration creep stage. In the third stage, the deformation of tethers increases with a much smaller growth rate and is called the long-term creep stage. The recorded strains of the two tethers in the third stage are only about 0.019%, and the difference of strains between the two tethers is almost constant in this stage.

Creep curves of Kevlar tethers with different lengths.
Repeated loading and unloading experiments are conducted to further analyze the creep behavior of a Kevlar tether. Using a Kevlar tether with length and diameter of 16 m and 1.5 mm, respectively, a load of 100 N is hung on the end of the tether. When the tether reaches long-term creep stage, the 100 N load is substituted by a 5 N load, thus, the tether is in an unloading state and tends to recover its undeformed shape. We select the initial length of the tether as the origin of coordinates in order to facilitate the comparison of creep process and recovery process and avoid negative deformation. Figure 4 records and shows the deformation of the tether in the recovery process is recorded and shown in Figure 4. It is seen that tether length in the recovery process is time dependent and can be roughly divided into three parts. The first part is marked by the abrupt deformation change at the onset of unloading. This part of deformation corresponds to the elastic deformation of the tether. The second part corresponds to the recoverable deformation generated in the creep process, which is also called the viscoelastic creep. The deformation gradually shortens with a low rate for a rather long time. The third part is due to the unrecoverable creep deformation in the unloading process.

Creep curve of the tether under single loading and unloading.
In order the experimental curves of the same tether under repeated loading and unloading are plotted in the same figure to further explore the influence of unrecoverable creep of the tether on experimental results. The Kevlar tether sample has a length and diameter of 16 m and 2.0 mm, respectively. The initial length of the first static position is set as the zero point of the deformation, and the four experimental curves are obtained as shown in Figure 5.

Creep curve of tether under repeated loading and unloading.
Table 1 presents the initial deformations of the four creep curves and the final deformations. It can be seen that the tether length cannot return to the previous initial state after each standing, which means that a certain amount of unrecoverable creep will be generated. The unrecoverable creep deformations generated by the previous three standings are 0.008, 0.005 and 0.003 m, respectively, which shows a decreasing trend. This phenomenon may be related to the internal structure of the tether. A certain clearance is observed between yarns in the fiber and fiber bundles in the tether, thus, the yarns and fibers are not fully tightened in the initial condition. Under the action of a given load, the tether firstly gets fully tightened, resulting in a large abrupt deformation. After that, if the load still presents, the tether will elongate as a result of elastic deformation. The deformation rate remains almost constant. In this process, the friction between different yarns in the fiber and different fibers in the tether begins to play a role in the deformation of the tether. This friction also incurs an internal slip of molecular chains in the yarn and results in the unrecoverable internal deformation in the tether. As the load persists, the elastic deformation reaches its maximum, and the internal slip begins to dominate the total deformation of the tether. As a result, it is seen that the total deformation of the tether varies slowly with time.
Initial and final deformation of four tests.

Nonlinear stiffness
Figure 6 records an plots the deformations of tethers with different initial lengths under different applied loads. Obvious nonlinearity is shown in the curve. Thus, the curve is tried to fit with cubic function and power function. It can be seen that both functions fit the nonlinear stiffness curve well for the three tethers with different lengths. It should be noted that in case of small deformations, the power function model yields certain deviations, while the cubic function shows no deviations.

Nonlinear stiffness tests and fitting results.
The fitting model by the cubic function can be expressed as

Table 2 lists the fitting parameters for tethers with different lengths. It can be seen that the value of parameter a3 is negative, and its absolute value gradually decreases with the increase of the tether length l0. The values of parameters a1 and a2 are positive, and their values gradually decrease with the increase of the tether length.
Fitting parameters of the cubic function model for tethers with different lengths.

From a quantitative point of view, for tethers made from the same material with different lengths, its nonlinear static stiffness model should assume similar forms. To be more general, the applied tether tension F should be a function of the tether strain ε

The tension F and strain ε for three tethers with different lengths are then fitted by the least square method using a cubic function

Figure 7 shows the results. It can be seen that the tension-strain curves of three different tethers have good consistency, and the cubic function model can fit well the tension-strain relationship for tethers with different lengths.

Fitting results of tension-strain.
To further verify the aforementioned tension-strain model, the nonlinear stiffness of the 8 m tether is predicted according to the parameters of the obtained tension-strain model. Figure 8 shows the results. Good agreement is found and the validity of the model is then guaranteed.

Prediction result for the 8 m tether.
Hysteresis effect
The Kawabata model (shown in Figure 9) indirectly accounts for many special properties of fibers, including nonlinearity, anisotropy, and hysteresis. 22 The shape of the stress-strain curve (in extension and recovery) is concave and monotonous.

Diagram of the Kawabata model.
The linearity for both cases can be defined as follows:

where ε is the strain, B and B′ are constants. The maximum strain ε0 and the maximum stress f(ε0) can be obtained according to the test. WT is the tensile energy per unit area in extension, and can be expressed by the following formula:

The notation S is the area of the triangle OEF and is given by

The linearity of the tensile curve is then given by

The notation WT is the tensile energy per unit area in recovery and is given by

Then

is defined as the elastic recovery rate.
According to equations (4)−(7), the following is obtained

Equation (10) can be simplified by the derivative and integral as

Substituting equations (4), (5), and (6) into equation (11), the tensile curve in case of extension is obtained

The tensile curve in case of the recovery can be obtained in the same way. The Kawabata model is given as follows

The Kawabata model, parameters, that is, WT, LT, ε0, and RT, can be directly obtained by loading and uploading experiments, and the Kawabata model can be obtained by equation (13). To the specific test for a Kevlar tether, the strain ε and stress f(ε) are replaced by the deformation x and tensile load F. The single loading and unloading tests for the three tethers with different lengths are conducted under two maximum loads (6 and 3 kg), respectively. Figure 10 shows the fitting results. It can be seen that the Kawabata model curves are in good agreement with the test results for the three different tethers under two different maximum loads, indicating the correctness of the Kawabata model to describe the hysteresis effect of the Kevlar tether. It is noted that the tether cannot fully restore to its original length due to plastic deformation, creep and other nonlinear effects. Strictly speaking, the variation range of strain ε in Kawabata model in recovery is not ε∈[0, ε0], but ε∈[ε1, ε0], where the constant ε1 is greater than zero.
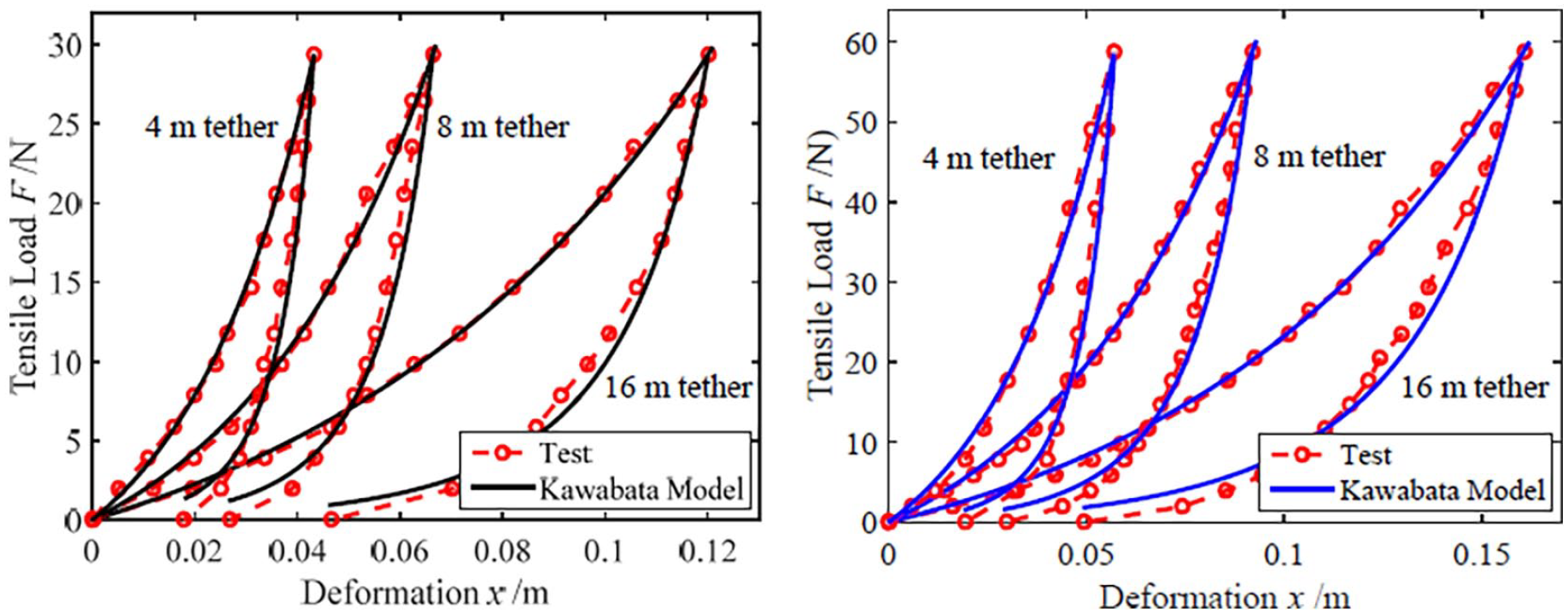
Nonlinear stiffness tests and fitting results.
Nonlinear dynamical property
The quasi-static hysteresis effect of the Kevlar tether in the process of slow loading and unloading was studied in Yi et al., 23 and a generalized Bouc-Wen model with flexible shape control was proposed to describe the asymmetric hysteresis effect of the Kevlar tether. However, the damping property of the Kevlar tether is not reflected in the model. In other words, the above quasi-static model cannot be used to describe the dynamical property of the Kevlar tether under violent vibration. To obtain the general nonlinear dynamical property of the tethered system, the damping of the Kevlar tether can be considered to be added to the above quasi-static hysteresis model. The damping coefficient of the tether can be considered as a dynamic changed term related to the displacement considering the nonlinearity of the damping. Figure 11 shows the physical block diagram of the established dynamical model of the Kevlar tether.

Physical diagram of dynamical model.
In the dynamical model, x denotes the deformation, F the tensile load, Fk the elastic force, Fc the damping force, z the hysteretic force which is the virtual state variable without actual physical meaning and cannot be directly measured. The expressions of Fk, Fc, and z are as follows

Therefore, the total tensile load of the Kevlar tether can be expressed as

The balance position of the test load is taken as the zero position of the displacement, and the following is obtained

where m is the mass of the test load. The above formula can be obtained simultaneously

The least square method is used to identify the parameters in equation (17) according to the vibration tests. The parameters in the dynamical vibration test are the mass of test load m = 4.3 kg, the tether length l0 = 16 m. The initial displacement is set as -0.1669 and -0.1184 m, and Figure 12 shows the fitting results. It is seen that the nonlinear dynamical property of the Kevlar tether can be well described by the proposed dynamical model.

Dynamical model and fitting results. (a) x0 = −0.1669 m and (b) x0 = −0.1184 m.
Table 3 lists the fitting parameters, showing that parameters under different initial displacement are quite different. In fact, the fitting results are not unique because of too many parameters in the dynamical model. Thus, the correctness of the model form can only be verified, and the correct model parameters cannot be obtained. It is necessary to simplify the dynamical model.
Fitting parameters of the dynamical model for different initial displacements.

Considering that the above nonlinear dynamical model of the Kevlar tether is too complex and has limited guiding significance for the dynamical analysis of the tethered system, the appropriate simplified model can be considered. It is noticed that the hysteresis force z contains vibration velocity term, reflecting the damping property of the Kevlar tether to a certain extent. Therefore, the hysteresis force term and damping force term are considered to be integrated into the damping term, which can greatly reduce the number of parameters in the model. The simplified model can be described as

Figure 13 shows the simplified model fitting results according to the dynamical vibration tests. It can be seen that the simplified model is in good agreement with the vibration tests. The simplified model can describe the nonlinear dynamical property of the Kevlar tether to a certain extent, especially the first three cycles of the vibration, and the fitting effect is very good.
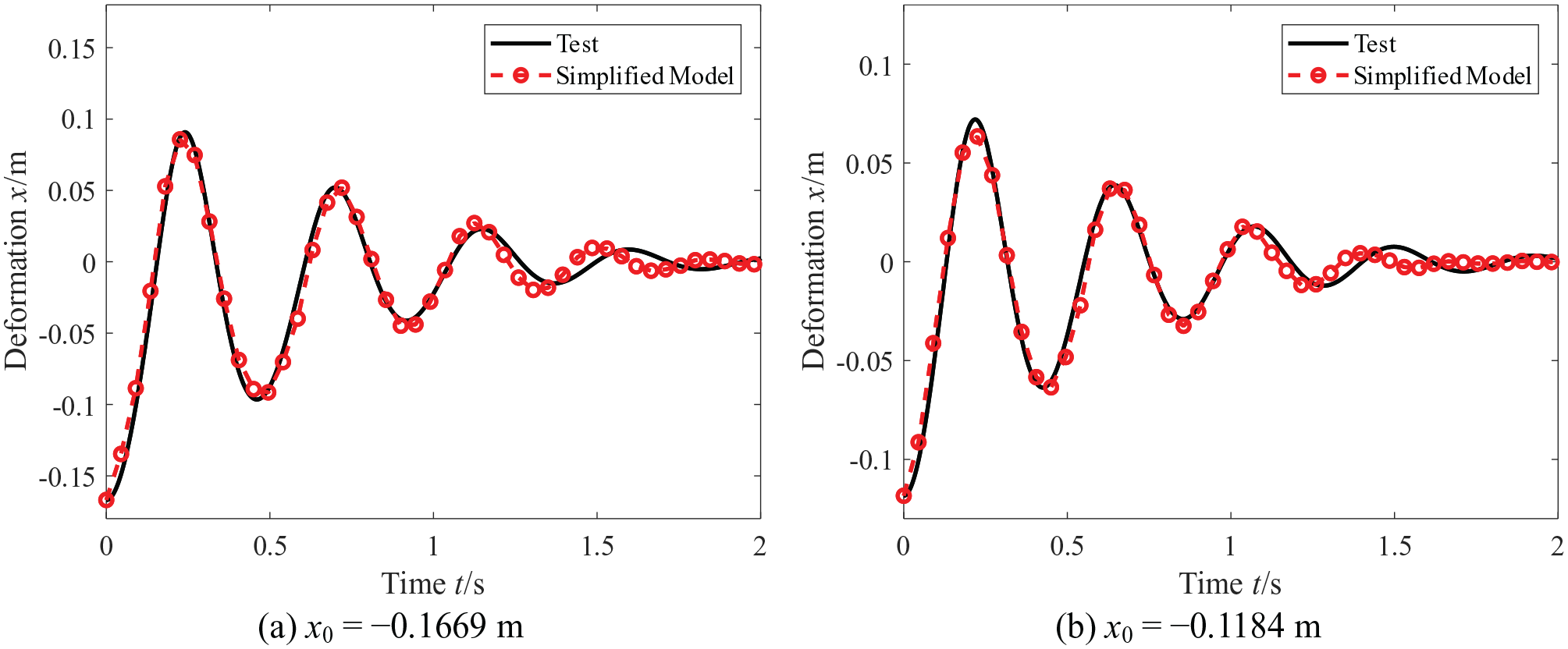
Simplified model fitting results. (a) x0 = −0.1669 m and (b) x0 = −0.1184 m.
Table 4 lists the fitting parameters of the simplified model for different initial displacements. It is seen that parameters under different initial displacements have a good consistency. It is obvious that the parameters in the simplified model are related to the initial displacement and tether nature length, which deserves further investigation, but this is not expanded in this paper.
Fitting parameters of simplified model for different initial displacements.

Conclusions
In this paper, the nonlinear mechanical behaviors including the nonlinear stiffness, hysteresis effect and dynamical property of the Kevlar tether are studied experimentally. The main conclusions drawn are as follows:
(1) The creep process of the Kevlar tether is divided into three stages, namely, linear creep stage, deceleration creep stage, and long-term creep stage. The unrecoverable creep is dominant in the linear creep stage. The recoverable creep is dominant in the long-term creep stage. Finally, the tether completes the transition from the unrecoverable creep to recoverable creep in the deceleration creep stage.
(2) The longitudinal static stiffness of the Kevlar tether is strongly nonlinear, and the tension-strain relationship is fitted well by the cubic function. The nonlinear stiffness of the tether with any length can be predicted by the fitted model.
(3) The hysteresis effect of Kevlar tethers is proved to be strong by loading and unloading test. The hysteresis effect of Kevlar tether is fitted well by Kawabata model.
(4) The dynamical model with the form including the elastic force, hysteresis force and damping force can describe the dynamical property well, but the appropriate parameters cannot be obtained because of too many parameters in the model.
(5) The simplified model is in good agreement with the vibration tests, and have a good consistency under different displacements.
The influence of the initial state, tether nature length and diameter to the dynamical model is worth a further study.
Footnotes
Authors’ Note
Ban Wang is also affiliated to Zhejiang University, Hangzhou, Zhejiang, China.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (Grant no. 51805124) and in part by the Zhejiang Provincial Natural Science Foundation of China (Grant no. LZY22E050001 and LQ23F030011).