
Abstract
Robots can be used, among a broad variety of different applications, in the textile industry to fulfill mechanically challenging tasks which common automats are not capable of. On the contrary, textile fabrics can also be integrated in robotics. Textile-based laminates can be applied as actuators; spacer fabrics can prevent robot arms from hurting men or autonomous robots from damaging themselves on difficult terrain; or as flexible sensors in soft and traditional robotics. Here, we give an overview of recent applications of textile materials in robotics and point out possible future utilization of diverse textile materials in this emerging field of research and development with increasing importance for industrial processes as well as services.
Introduction
Thinking about the combination of robotics and textiles, usually the first idea is handling or manipulating textile fabrics with robots. Paraschidis et al. 1 presented a robotic handling system for flat textile fabrics, based on vision and force sensing, already in 1995. Wittig 2 reported on robotic stitching technique for textile-based composites, while Potluri et al. 3 suggested robotic preforming of composites as advantageous in comparison with usual three-dimensional (3D) weaving methods. A robotic assembly cell for airbags, including automatic sewing, was developed by Seliger et al. 4 Taylor and Koudis 5 suggested a robotic sewing system for complex manipulation of partially assembled garments.
Here, however, we want to give an overview of the opposite way—how are textile fabrics already included in robotic manipulators, autonomous robots, or soft robotics, and which additional utilization can be thought of for the future? Especially in the broad and emerging field of human–robot interaction (HRI) and soft robotics, diverse applications are already in use or can be thought of for the future. Some of them will be presented in this article.
Soft robotics with textile fabrics
Soft robotics defines the field of robotics which deals with intrinsically soft or extensible materials used for the construction of robot bodies and actuators, mostly to avoid damaging people working together with them, but also as a possibility to create robots with new capabilities. 6 Such soft robots are often inspired by biological models.7,8 Opposite to common robots used in the industry which are based on rigid materials and fulfill one or a few operations efficiently, soft robots are more flexible in the doubled meaning—using flexible materials, they can be applied more flexibly for a broader range of tasks. 6 They are of special interest in confined spaces, since they may adapt their shapes correspondingly.9,10
Textile fabrics are naturally of high interest in this field of research due to their bendable, flexible, and often stretchable nature. One of the first bases for soft robotics based on textile fabrics is the McKibben pneumatic artificial muscle which was developed in the middle of the last century.11,12 In 1996, Chou and Hannaford modeled and measured the properties of the McKibben pneumatic artificial muscle in detail for different textile materials and found a dynamic range comparable to the one of biological muscles, a much higher tension intensity and stiffness intensity as well as an increased peak power density and energy efficiency but also pointed out the problems connected to the valve and the gas source for the pneumatic system and so on, indicating that more work was necessary on this subject. 13
Suzumori et al. 14 developed a flexible electro-pneumatic or electro-hydraulic micro-actuator system based on fiber-reinforced rubber, allowing creating a multi-fingered robot hand with several parallel acting flexible micro-actuators serving as fingers.
A pneumatically actuated soft robotic hand was developed by Deimel and Brock, based on combining silicone rubber, polyester fibers, and a polyamide scaffold. The radially inserted fibers stabilize the shape of the actuators during inflation and thus result in bending of the fingers instead of radial expansion, while the bottom of the fingers contains an inelastic fabric which is necessary to keep one part of the finger unextended during inflation. 15 Other groups also discussed textile fabrics made from diverse materials, such as polyester and fiberglass woven fabrics or polyaramide nonwovens, as part of the inelastic bottom layer.16–18
Bishop-Moser et al. 19 used fluid-filled fiber-reinforced elastomer enclosures which they combined in parallel. The incompressible fluid and the inextensible cotton fibers define the motion of each individual actuator, while parallel combination of three sets of actuators arranged triangularly increased the overall workspace.
For the construction of a soft gripper with variable stiffness, Sun et al. found inspiration in pangolin scales. They suggested a soft finger composed of a layer with variable stiffness and a driven pneumatic actuator which includes a fiberglass mesh as inextensible layer. 20
Guo et al. 21 suggested conductive textile fabrics as electrodes for soft robotics. On the one hand, they concentrated on dielectric elastomer actuators, built from thin elastomer membranes between compliant electrodes which can strongly and fastly deform. 22 On the other hand, they investigated electro-adhesion, that is, electrostatic adhesion applied to pick up and hold objects. 23 The dielectric elastomer actuators investigated here were built up as follows: a pair of stretchable conductive textiles (not specified more in detail) was adhered manually on both sides of a pre-stretched dielectric membrane and contacted by conductive paints and copper wires. By applying voltages in the kV range, the electrode area was expanded, and a strain could be measured. In this way, a bending actuator with two stretchable conductive textile electrodes could be prepared which was used to create a lightweight crawling robot which traveled 18 mm distance in 3 min on a wooden surface.
Conductive textiles were also used to prepare an octopus-inspired continuum arm with resistive strain sensors. 24 Beccai et al. suggested a multi-layer structure, consisting of two non-stretchable copper/tin-coated textile electrodes sandwiching an intermediate floating dielectric layer for a three-axial force sensor, all together laminated to create a flexible and nevertheless robust capacitive sensor. In this way, they could measure the bending state of a soft cylinder which could be used as a soft robot. 25
Stalin et al. 26 also concentrated on the textile part, or more exactly, on the combination of fibers and soft materials. They discussed the problems of manually embedding fibers in the soft materials used for soft robots, in comparison with the also not fully satisfying approaches using commercial embroidery machines or robots, and suggested a 3D printing approach with one polymer extrusion head and one fiber dispensing head, allowing for tailoring fiber depths, orientations, and densities at each point of the sample. This approach is more sophisticated than earlier attempts to manually insert fibers or wires into 3D-printed objects,27,28 but still far from a simple commercially available solution.
Such fiber-reinforced soft actuators were also used by other groups, for example, for underwater gripping with a soft robotic hand.29–31
Besides these developments of soft robots independent from humans, there are also diverse approaches supporting human movement with soft robotics. Further interactions of humans with robots are discussed in the next section.
Park et al. report on designing and controlling a wearable robotic system with pneumatic artificial muscles for ankle-foot rehabilitation. Their soft orthotic device should mimic the original biological musculoskeletal system and thus has to ensure no rigid frames, no constraints on the natural joint motion, and no invasive actions. 32 They applied commercially available textile knee straps to fix the orthotic device along the lower leg and foot, but used custom-built strain sensors and artificial muscles instead of textile-based ones.
A soft robotic glove for hand rehabilitation of people with functional grasp problems was designed by Polygerinos et al. 33 This robotic glove could on one hand support disabled people with daily activities; on the other hand, serve as a tool for home rehabilitation. Elastomers with fiber reinforcements were used as hydraulic multi-segment soft actuators which replicated many typical finger and thumb motions (Figure 1), while the basic glove was prepared from inelastic textile material.

Soft robotic glove in diverse movements and grasping situations: A) index finger-thumb opposition contact, B) small finger-thumb opposition contact, C) index finger flexion, D) grasping a bottle of water using all fingers, E) picking up a telephone using all fingers, except of the small, and F) grasping of a television remote control using a tripod pinch. From a previous study 33 reprinted with permission from Elsevier.
The same group also created an electromyography (EMG)-controlled soft robotic glove to support people with hand impairments, using a fully textile glove with fluidic soft bending actuators prepared from a combination of elastomer and non-stretchable materials.34,35
Cappello et al. used another approach. They combined knitted and woven fabrics, that is, elastic and non-elastic materials, as top and bottom layers around an airtight bladder. 36 More specifically, the top layer was a warp-knitted raschel polyamide-elastane textile with preferential strain along the longitudinal direction and with limited lateral stretch, while a plain weave polyamide textile was chosen as bottom layer. In addition, pleats were inserted to further increase the possible curvature in states with different pressure of the airtight bladder inside. Combining pleats with the aforementioned fabric anisotropy enabled constructing a soft robotic glove with pleated actuators which was able to support grasping forces during daily activities.
A bending sensor for a robotic glove was constructed by Atalay et al. 37 As sensory material, they used dielectric silicone, sandwiched between conductive knitted electrodes made from silver-coated yarn so that the sensor mat was parallel to the wale structures, which were adhered by additional silicone. As data connections, micro coaxial cables were fixed at the sensor edge with instant adhesive and sealed with thermal seam tape to create a robust electrical connection. The resulting signals produced by different gestures are shown in Figure 2.

Signals produced from the sensory glove by different gestures. a) Photo of a sensing glove, b) Cable routing and strain relief are provided by the overlaid thermal film, c) Schematic diagram of the sensor placement and integration: (i) attachment of the sensor using a silicone adhesive and (ii) sensor with adhered thermal film and d) Capacitance output of the fingers during hand motion. From Atalay et al. 37 reprinted with permission from Wiley.
A soft wearable robot (exosuit) for stroke recovery patients was developed by Awad et al. 38 The exosuit consists of garment-like functional textiles which fix it at the patient’s waist and paretic calf. Straps straddle the knee joint center. The modules contain lightweight laminates to define force transmission paths and distribute pressure and are on the body-side coated with nonslip liners to avoid undesired motion relative to the patient’s body.
Yuen et al. 39 concentrated on textile fabrics with integrated sensing and actuating possibilities for wearable robots, showing bending as well as compressing of the same robotic fabric. They integrated a shape-memory alloy wire as actuating mechanism which forms like a helical coil when heated, in this way modifying its length up to 50%. By integrating these wires on a muslin base fabric which was wrapped around a foam block, either compression or bending of the foam block could be reached.
Araromi et al. used a carbon fiber composite encapsulated in an elastomer in combination with high-strength, high-stiffness textile fabrics as load-bearing elements to prepare a force sensor for soft exosuits. They found that the very lightweight sensor could detect forces up to 300 N, with an initial drift being canceled after some time. 40
HRI
Humans interact with robots not only in the industry, but also with service robots. The latter necessitate more complex and more autonomous robot systems, as depicted in Figure 3. 41 Such robotic helpers can support humans in a broad field of tasks, from rescue missions to personal assistance to healthcare.42,43 Haidegger et al. 41 discuss diverse possible definitions to classify service robots, one of which is as follows: robots replacing humans in dangerous situations or rescuing them; robots operating closely with humans, for example, to assist elderly people; and medical robots operating on humans.
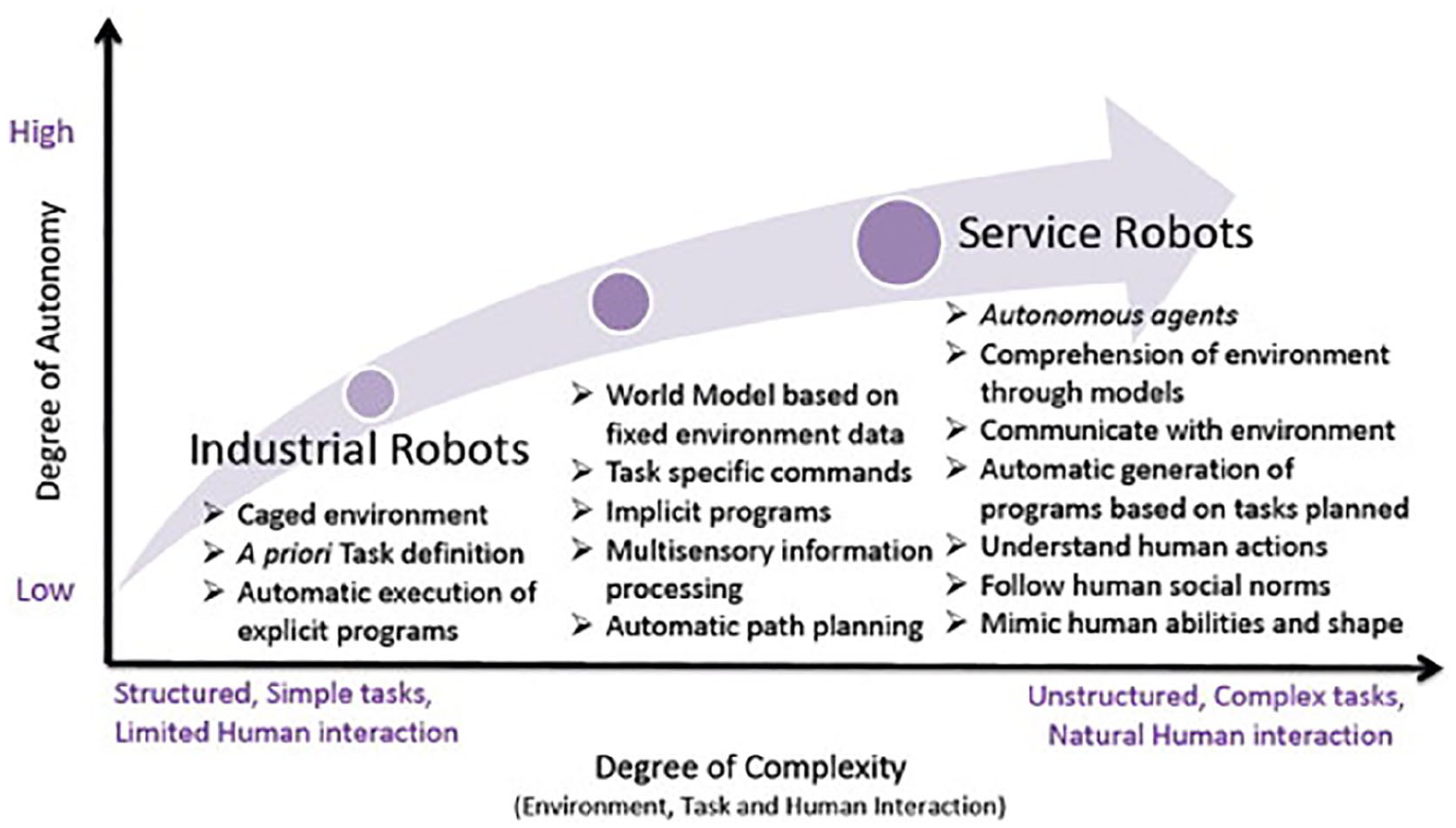
Evolution of robotics toward more complex and more autonomous systems. From Haidegger et al. 41 reprinted with permission from Elsevier.
Voisembert and colleagues44,45 investigated the possibility of designing a long-range robotic arm from an inflatable structure. They concentrated on the joints for which they found inspiration in spacesuits which contain bellows along the joints and thus investigated pleats integrated in the woven Dyneema fabrics with tight coating used for the inflatable structures. Their studies showed that the long-range robotic arm could in principle be built in this way, but other problems like hysteresis errors and high damping had to be resolved.
Another approach to prepare a soft inflatable robotic arm for daily assistance at home was suggested by Liang et al. 46 A nylon fabric was coated with thermoplastic polyurethane, in this way making the original fabric airtight to allow for pneumatic actuation. With two joints in perpendicular directions and a soft robotic gripper at the end, objects of various shapes and sizes could be grabbed. Disadvantages were the long response times due to the large inflation volume and deflection at the gripper due to arm body sinking. These problems shall be solved by integration of soft sensors and thus precise control of the robotic arm.
For minimally invasive surgery, Wurdemann et al. 47 investigated electro-conductive yarn as bending sensors, integrated in a pneumatic soft actuator.
Several papers concentrate on safety requirements in HRI. Elkmann et al. suggested a textile-contact force-monitoring system in the form of a pressure-sensitive artificial skin for a robot. This skin additionally includes an energy-absorbing foam layer. Combining the sensing and the energy-absorbing function of the soft shell for the rigid robot, an emergency stop system was built up, which could avoid damages of humans interacting with this robot. 48
A combination of a textile pressure sensor, based on the piezoresistive effect, in combination with a polymeric layer from silicone to increase safety in HRIs was suggested by Mazzocchi et al. They performed experimental and theoretical investigations of the system and found good agreement between both of them but also mentioned a certain time delay which should be investigated further. 49
A textile pressure mapping sensor for the detection of gestures related to social and emotional interactions was developed by Zhou et al. 50 The textile fabric has a three-layer structure from a carbonated polymer fabric, sandwiched between metallic fiber stripes woven in a non-conductive fabric as parallel electrodes, and works resistively. It offers a fine and reliable pressure location information with each crossing point of top and bottom layer electrodes being pressure sensitive, so that the distance between the electrodes defines the lateral resolution of the pressure detection. An example of the reachable resolution is shown in Figure 4. In this way, a textile robot skin prototype was developed which could detect different touch gestures.

Visualization of pressure on the textile pressure mapping sensor. From Zhou et al. 50 originally published under a CC-BY license.
More generally, Andreasson et al. investigated how humans expressed different emotions toward a Nao robot, a small autonomous robot, and found that women expressed emotions longer and by touching more regions of the robot than men. The results were in good agreement with experiences in human–human tactile communication, which allows for better interpretation of the output of touch sensors around humanoid robots. 51
Other forms of robotics using textile materials
A completely different approach to combine robotics with textile materials was presented by Ramsgard Thomson. 52 She prepared two “robotic membranes,” large arts installations, one of which reacting to inhabitation by inflating and deflating, while the other one can be actuated with heat changes and included LED lights.
Going beyond the aforementioned bioinspired soft robots, some research groups have investigated hybrid robots, combining bioinspired with biological material. Nawroth et al. 53 grew rat cardiomyocytes on polydimethylsiloxane jellyfish-shaped thin films and could in this way mimic jellyfish swimming. Chan et al. 54 grew cardiomycytes on hydrogels prepared by a 3D printer, by this realizing a miniaturized walking biological robot.
Such tissue engineering research can also be carried out on textile substrates, such as electrospun nanofiber mats, 55 in this way allowing for using textile fabrics for this approach, too.
Interestingly, only one paper was found about the actually obvious possibility to combine common rigid robotics with soft, flexible textile fabrics. Karras et al. used the combination of a common printed circuit board with a woven textile to create a pop-up robot structure with improved folding kinematics and high robustness. In this way, an origami-inspired robot especially for spaceflight applications with sophisticated folding chassis and integrated electronics could be created. 56 Similarly, Stoica 57 suggested a robotic modular textile which would unfold itself after reaching the mission target, in this way reducing costs for launch and redesign for new space missions.
While a lot of research groups work on developing new soft robots for highly sophisticated applications, either as service robots to support older or handicapped people, for rehabilitation or other medical purposes, there is unexpectedly nearly no research dealing with combinations of rigid and textile robotics. Especially such “hybrid” robotics, however, have in our opinion the big advantages of combining common and well-known technology with the soft, often protective properties of textile fabrics. Such an approach can be found using foam layers or polymeric layers to surround rigid robots for safer HRI,48,51 but to the best of our knowledge, no pure textile shells were suggested yet.
Warp knitted spacer fabrics are often used for impact-protective applications, 58 but the obvious idea to use them also for protection of humans in HRI or for protection of robots in dangerous environments could not be found in the literature. Such a hybrid robot with soft shell and rigid core, however, could be relatively easy to produce, since its design would be very near to recent robot arms or autonomous robots; its rigidity would be identical with common solutions and thus would make it usable in common environments; while the soft shell, for example, in the form of a warp-knitted spacer fabric, would avoid damages of co-working humans as well as damages to the rigid inner body of the robot when working in harsh environments. Different methods of fixing such a soft shell on a rigid autonomous robot or robot arm can be thought of, starting from mechanically fixing parts of the inner textile layer by clamps or textile technologies like knotting or sewing to gluing to combinations of these and similar techniques. For most applications, it makes sense to leave the protective soft shell continuously around the robot; especially for autonomous robots in unmanned space missions and similar situations without humans around, it may also be interesting to allow the robot to detach the soft shell, for example, after landing on an asteroid or a planet’s surface, in this case necessitating removable shells held by electromagnetic forces and so on.
Conclusion and outlook
Many research groups have investigated new approaches in soft robotics during the last years, on the one hand dealing with security issues in HRI, on the other hand concentrating on material and system development to make these soft robots smarter, more interacting, integrate more sensory features, allow more movements in smaller spaces, and so on.
Our review gives an overview of some of these approaches, dealing with artificial muscles, smallest bio-inspired or bio-hybrid robots, used in medicine, rehabilitation, or other forms of HRI. We also point out that the actually obvious idea to surround common rigid industrial or service robots with a soft protective textile shell, ideally from warp-knitted spacer fabrics, has not been investigated deeply yet. This is why we recently work on creating such a soft shell for a hybrid robot for harsh environments. The project aims at optimizing not only the soft textile shell for different applications of autonomous and other robots, but also on investigating the best methods to fix the shell on the robot, on the one hand adhering strongly enough to avoid any undesired detachment, on the other hand possibly allowing for detaching the shell intentionally after the heavy impact on a planet’s surface or after landing in otherwise inaccessible areas, to give the robot more freedom to accomplish its mission without possibly being stuck with the textile shell at any hooks, branches, sharp rocks, and so on.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The results were obtained within the Project Based Learning (PBL) project “Design and implementation of a double robot system equipped with image recognition system enabling guidance - virtual and real modeling” funded at Silesian University of Technology through the POWR-03.05.00-00-Z098/17-00 program. The APC is funded by the Open Access Publication Fund of Bielefeld University of Applied Sciences and the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - 414001623.