
Abstract
Objective:
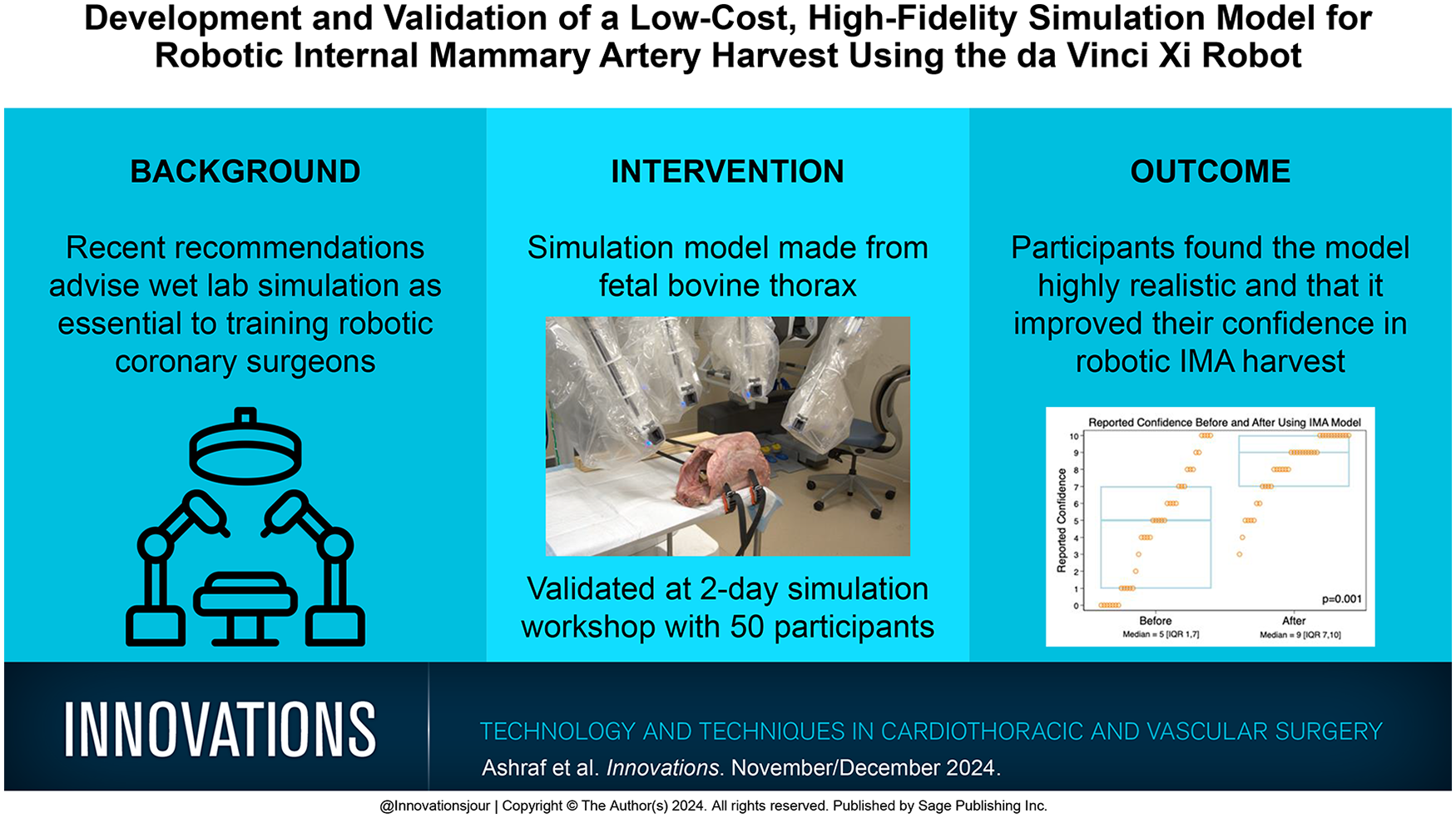
We created and validated a low-cost simulation model for robotic internal mammary artery (IMA) takedown.
Methods:
The simulation model utilized a calf fetus thorax cavity stented open internally and secured to a table. The simulation model was validated at a 2-day robotic cardiac surgery workshop. Each participant harvested one IMA using the da Vinci Xi robot (Intuitive Surgical, Sunnyvale, CA, USA). We compared participant self-reported confidence at robotic IMA harvest before and after using the simulator.
Results:
Our novel thorax-securing strategy resulted in a stable structure and allowed access to both IMAs from the same 3 ports. The cost to set up the first simulation model was $176 and $133 for every subsequent model. Fifty participants used the simulation model: 42 cardiothoracic surgery attendings and 8 fellows or residents. The feedback form response rate was 78% (n = 39). On the Likert scale, participants rated realism of the calf model to simulate robotic IMA harvesting (0 = not realistic, 10 = highly realistic) with a median of 8 out of 10 (interquartile range [IQR] 7 to 9). Participant confidence (0 = not at all confident, 10 = very confident) in robotic IMA harvesting before and after using the simulator increased (P = 0.001) from a median of 5 (IQR 1 to 7) to 9 (IQR 7 to 10).
Conclusions:
This robotic IMA harvest simulation model is affordable, realistic, and improved participant confidence in robotic IMA harvest. It may provide a valuable training tool for surgeons learning robotic coronary bypass surgery and allows for training frequency necessary to pass basic learning curves.
Keywords
Get full access to this article
View all access options for this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.