
Abstract
Widely linear (WL) adaptive beamforming algorithms are proposed based on constrained minimum variance (CMV) and constrained constant modulus (CCM) criteria, respectively, to fully exploit both the desired signal and interferences' noncircularity. Modified conjugate gradient (MCG) algorithm is employed to ensure convergence with one iteration per sample. To further facilitate the adaptive processing, CCM criterion based WL beamforming algorithm is modified by second-order local approximation. Global convergence of the proposed algorithms is analyzed and constraints of parameters are given. Results of numerical simulations demonstrate that the proposed WL CCM beamformer has superior performance over WL CMV beamformer and conventional beamformers in convergence rate, robustness against direction of arrival (DOA) mismatch, and the noncircularity coefficient estimation error, while the former two have comparable low complexities without numerical instability.
1. Introduction
Distributed sensor networks (DSNs) with independent sensing, processing, and distributed communication capabilities are widely used in field of climate, environment, and disaster monitoring, logistics and assets tracking, machine to machine (M2M) communication, and enclosures anti-intrusion [1]. However, the coverage of terrestrial mobile communication and broadband networks which can be employed to transmit the acquired data is limited especially in remote areas. As a powerful supplement of terrestrial sensor network, DSN based on low earth orbit (LEO) satellite cluster has thus received a great interest in recent years due to its advantage of global seamless coverage [2]. Nevertheless, LEO satellite is vulnerable to a variety of types of interferences from ground or airborne facilities due to its lower orbit and varied coverage environments [3, 4]. So many anti-interference techniques such as adaptive beamforming technology based on array antenna have been adopted to suppress interferences while tracking the desired signal [5].
Conventional beamforming algorithms treat signals as circular and only exploit the covariance matrix of the observation, but they are no longer optimal when signals are noncircular [6]. As the ubiquitous rectilinear modulation signals (such as ASK or BPSK) and quasi-rectilinear modulation signals (such as MSK, GMSK, or OQAM) after a derotation operation [7] in satellite communication systems normally exhibit second-order (SO) noncircularity, widely linear (WL) beamforming algorithms are of much interest, with which superior performances have been reported by exploiting both the covariance matrix and pseudocovariance matrix of the noncircular observation [8, 9]. In addition, satellite-borne DSNs may suffer potential noncircular interferences from ground or airborne facilities or adjacent satellite systems [4] and even malicious interferences from artificial modulator. With full exploitation of these signals' noncircularity, single antenna interference cancellation (SAIC) is enabled, and extra processing gain and suppressing ability can be achieved with multiantenna interference cancellation (MAIC) [10, 11]. Thus, it is attractive to exploit both the desired signal and interferences' noncircularity to improve the satellite-borne DSNs' transmitting capability [12].
For different adaptive beamforming techniques, there are two well-known optimization criteria, which are constrained minimum variance (CMV) criterion and constant modulus (CM) criterion. CMV criterion minimizes the variance of output signal while maintaining the response of the desired signal. It is widely used since only the direction of arrival (DOA) of the desired signal is required. Constant modulus algorithm (CMA) can converge rapidly without training sequence by exploiting the signal's constant modulus property [13]. However, when multiple constant modulus signals exist and the interferences are stronger than the desired signal, the CMA can easily capture the interference signals other than the desired one. An effective method to solve this problem is adding linear constraints [14]. Constrained constant modulus (CCM) criterion minimizes the deviation of the output signal from certain constant modulus while satisfying the constraints on the desired signal's response. Excellent performances have been obtained with CCM criterion in applications such as multiuser detection, interference suppression in CDMA system, and adaptive beamforming [15–17].
To take full use of the signal's SO noncircularity, a few of adaptive filtering algorithms such as least mean square (LMS) algorithm, recursive least square (RLS) algorithm, reduced-rank adaptive algorithm, and conjugate gradient (CG) algorithm are adapted for WL beamforming [18–23]. The WL complex-valued LMS algorithm as a kind of stochastic gradient (SG) algorithms is easy to implement [19], but both its convergence rate and steady state variance are still difficult to balance because of the constant step size. The shrinkage linear and shrinkage WL complex-valued LMS algorithms are also proposed as another two modified LMS algorithms in [20], where the approximately optimal variable step size is provided by exploiting the relationship between the noise-free a posteriori and a priori error signals. The convergence rate and steady state performance are effectively improved, but the variance of the sensor's additional noise is required to be known, which limits the algorithms' application. Meanwhile, the WL RLS algorithm is also introduced in [21], where weighted time average is used instead of the ensemble average used by the CMV algorithm. Faster convergence rate and better real-time performance are achieved, but it still has drawbacks of heavy computational cost and numerical instability problem [24]. In order to reduce the complexity raised by the extended dimension, reduced-rank adaptive processing is further introduced into WL RLS algorithm in [22]. The update of covariance matrix's inverse is specially devised, and the weight vector is updated using joint iterative optimization. Though the complexity is slightly reduced, it is still not clear how to select the proper rank. The CG algorithm as a familiar method for solving unconstrained optimization problems can also be used to solve problems of adaptive filtering [23, 25]. The algorithm has superlinear convergence rate with simple structure which facilitates programming. However, conventional conjugate gradient (CCG) algorithm needs several iterations per sample to converge, which is modified in [26] to ensure convergence with one iteration per sample. In this paper WL adaptive beamforming algorithms using modified conjugate gradient (MCG) algorithm are proposed based on CMV and CCM criteria, respectively. Superior convergence rate and steady state performance are achieved in WL CCM version over conventional beamformers and their CMV and RLS partners.
In addition, the steering vector mismatch of the desired signal introduced by platform perturbation, which will rigorously degrade the performance of the beamformer, should also be considered. To overcome this problem, several excellent methods have been proposed [27, 28]. In [27], the worst case performance optimization (WCPO) algorithm is introduced into WL beamforming. The noncircularity coefficient is estimated firstly and then the diagonal loading factor is solved by the Newton method. Nevertheless, the involved matrix inversion operation and iterative algorithm are highly resource-consuming for space-borne applications. In [28] the spatial spectrum of noncircularity coefficient is first introduced, and the robustness against steering vector mismatch is obtained by exploiting the reconstruction of the augmented interference-plus-noise covariance matrix. The drawback of this method still lies in its high complexity introduced by the augmented dimension. Besides, the algorithm cannot process more interferences than the number of sensors. In this paper, diagonal loading factor is implicitly introduced as compromise between robustness and feasibility. Numerical simulations demonstrate effective robustness of proposed algorithms.
The rest of the paper is organized as follows. Section 2 presents the satellite-borne distributed sensor data acquisition system and background on beamforming for circular and noncircular signals. Optimization criteria and conventional CG algorithm are introduced in Section 3. In Section 4, two WL beamforming algorithms are proposed based on different optimization criteria, and MCG algorithm is employed in the sample-updated adaptive processing. The estimation methods for augmented steering vector are given and methods against residual frequency offsets are also discussed. In Section 5, the proposed algorithms' performances, global convergence properties, and complexities are analyzed. Numerical simulations under satellite-borne anti-interference scenario are conducted in Section 6 and conclusions are drawn in Section 7.
2. Signal Model
Satellite-borne distributed sensor data acquisition system is normally composed of master and slave nodes, LEO satellite constellation, and remote processing center. According to the requirement of timeliness, data can be transmitted by less number of satellites in store-forward way or by more satellites in real-time way. Assembled with receiving array antenna, the satellites can establish links with more redundancy between the master nodes of the DSNs by beamforming technology, which guarantees reliable connections with the presence of heavy rain attenuation or other fadings. Meanwhile, variety of types of terrestrial and space-borne jammers can be suppressed, thus enhancing the links' survivability. Figure 1 shows the described system.
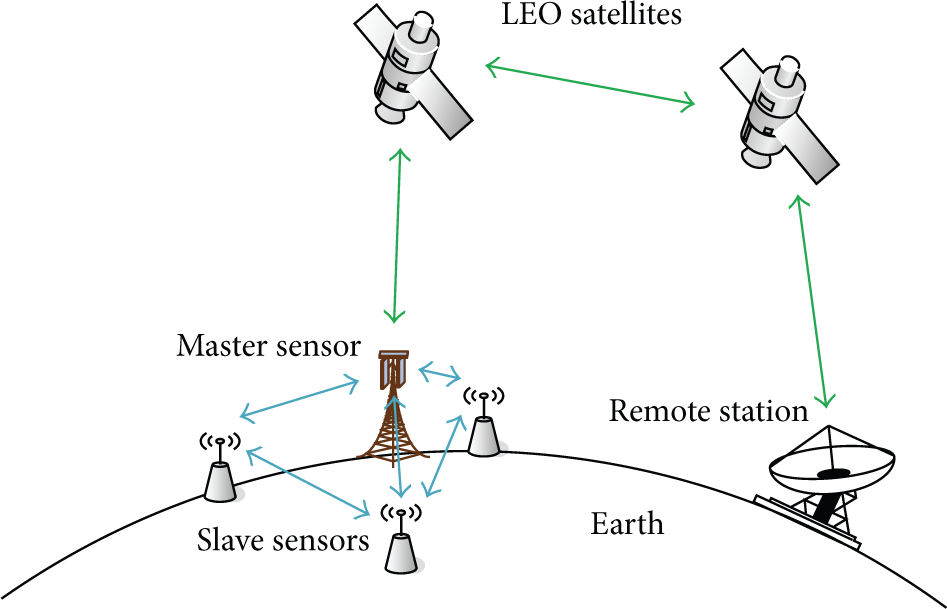
The satellite-borne distributed sensor data acquisition system.
2.1. Beamforming for Circular Signal
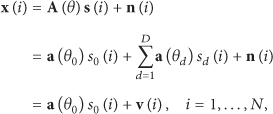
In general, we assume that the receiving antenna is a uniform linear array (ULA) with M elements spaced half a wavelength. The issues discussed here suit arbitrary plane array. The received signal

2.2. Beamforming for Noncircular Signal
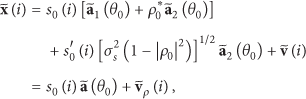
WL beamforming mainly exploits the signal's second-order moment noncircularity. For a noncircular complex random signal s with zero mean, there is pseudocovariance (conjugate covariance)




The signal

3. Previous Works
3.1. Design Criteria for Conventional Beamforming
CMV criterion is the most common criterion, which can be expressed as



CM criterion mainly exploits the constant modulus property of the desired signal, of which the objective function can be expressed as


3.2. Widely Linear Beamforming
The issue of WL CMV beamforming can be similarly described as



For WL CCM beamforming the problem can be described as

3.3. Conventional CG Algorithm
Conventional CG algorithm solves the optimization problem with the form


Algorithm 1.
Conventional CG algorithm:
Initial:
Update:
For
Here


It is seen that each iteration in CG algorithm contains only little matrix-vector multiplications with a very low complexity. But in systems updated by sample, at most M iterations are required per sample, where M is the dimension of the weight vector.
Considering the drawbacks of LMS and RLS algorithms, there are scholars employing CG algorithm in the update of adaptive filtering [25]. Under the framework of WL beamforming, novel WL beamformers with modified CG algorithm based on CMV and CCM criteria are proposed in this paper, respectively.
4. Proposed Widely Linear Adaptive Beamforming Algorithms
4.1. Widely Linear MCG Beamforming Based on CMV Criterion
To implement the sample-updated adaptive algorithm, the following exponentially decayed data window is introduced to estimate


As mentioned above, multiple iterations are required per sample in CCG algorithm. Inspired by the idea of [26], we use the degradation strategy and inexact line search to realize convergence with one iteration per sample.
In Appendix A we illustrate that, in order to guarantee the decent property of the modified CG algorithm, we can define

As is similar in Algorithm 1, the update of direction vector is given straightly as

After each update, the adaptive weight vector is given by

The entire flow of CMV-based WL MCG adaptive beamforming algorithm is shown below (see Algorithm 2).
Algorithm 2.
CMV-based WL MCG adaptive beamforming algorithm:
Initial:
Update:
For
4.2. Widely Linear MCG Beamforming Based on CCM Criterion
CCM criterion based WL beamforming can be described as (18). The objective function can be transformed to the unconstrained form by using the Lagrangian multiplier method:




Here we define the update formula of

Algorithm 3.
CCM-based WL MCG adaptive beamforming algorithm:
Initial:
Update:
For
4.3. Estimation of Augmented Steer Vector
In the proposed algorithms, the DOA of the desired signal is assumed to be known. In practice, as the position of satellite is conveniently obtained by ephemeris prediction or GPS-based locating equipment, and with the terminals' position being uploaded in the authentication period, the DOA of the desired signal can be easily calculated. Even with mobile or new joined terminals, several DOA estimation methods particularly devised for noncircular sources given in [35–37] can be exploited.
After the DOA is obtained, the augmented steering vector can be gotten straightly if the noncircularity coefficient of the desired signal is known. When it is unknown, the least squares (LS) algorithm can be employed to estimate it with the aid of training sequence in communication systems [12]. The formula of the estimator is

4.4. Methods against the Doppler Frequency Offsets
The potential Doppler frequency offsets introduced by satellite motion will change the noncircularity coefficient of the received signal. Assuming that the signal arriving at the array is
To compensate the degradation, several blind frequency offset estimation algorithms for noncircular signals proposed in [39, 40] can be employed. In practice, with the satellite's position and the terminal's DOA known, the Doppler frequency offset can be estimated accurately. Then the offset can be compensated in the digital down conversion (DDC) module in a convenient way. Besides, similar to the cyclostationarity exploited in [41], the conjugate cyclostationarity can also be used to improve the performance of WL filtering. The augmented cyclic observation vector can be defined as


The analysis above considers only the frequency offset of the desired signal. However, all the signals and interferences will involve different frequency offsets due to the satellite motion, which is the more usual case. Similarly, the frequency offsets of the interferences will lead to performance degradation due to the insufficient exploitation of the interferences' noncircularity. Since (38) exploits only the conjugate cyclostationarity of the desired signal, it is no longer optimal with different frequency offsets of the desired signal and interferences. Recently, a class of Multi-input FRESH (FREquency-SHifted) filter has been reported in [10, 11], which can fully exploit the cyclostationarity of both the desired signal and the interferences. Inspired by the idea mentioned above, we define an M-order augmented observation:

5. Analysis of the Proposed Algorithms
5.1. Output Performance
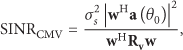
The output SINR can be used to evaluate the performance of proposed algorithms. For conventional CMV, CCM-based beamformers, the SINR can be denoted by (12). Substituting the optimal weight vector denoted by (11) into (12), we get the optimal SINR of conventional beamformers as

The output SINR of WL beamformers can be denoted by (17). Substituting the optimal weight vector of WL beamformers denoted by (16) into (17), we can get the optimal SINR of WL beamformers as

Observing the sets

5.2. Convexity and Global Convergence Analysis
The cost function of WL CMV beamforming algorithm given by (15) has the same form of (10), which is the convex function of the augmented weight vector
As a fourth-order function the undesired local minima exists in the cost function expressed as (29). In Appendix B, we show that with the introduction of linear constraint the objective function can be devised to be convex if proper parameter is selected. By transforming the objective function into a more detailed form, we calculate the Hessian matrix with respect to the auxiliary variable

5.3. Implementation Complexity
In Table 1, the complexities of per sample update with normalized LMS algorithm (denoted as CMV-NLMS), RLS algorithm (denoted as CMV-RLS), CMV-based WL MCG adaptive algorithm (denoted as WL-CMV-MCG), CCM-based WL MCG adaptive algorithm (denoted as WL-CCM-MCG), and WL RLS beamforming algorithm (denoted as WL-CMV-RLS) are compared.
Complexities comparison of related algorithms.

Here we can see that the complexity of MCG algorithm is

Complexity comparison of related algorithms.
6. Numerical Simulations
In order to reveal the superiority of proposed WL MCG algorithms in convergence rate and performance in stationary and nonstationary environments over conventional RLS algorithm and CG algorithm, numerical simulations are conducted. In simulations of this context, we assume that the receiving antenna is a ULA with element number
Evaluation 1: Performances in Stationary Environment. First we compare the algorithms' convergence performances in stationary environment. Simulation scenario is set as Scenario 1 shown in Table 2. There are one desired signal denoted as User 0 with
Simulation scenarios setup.

Figure 3 presents the convergence curves of related algorithms as well as the optimal output SINRs of conventional beamformer and WL beamformer in Scenario 1. We can see that the optimal SINR of WL beamformer is nearly 3 dB higher than that of the conventional beamformer. Among all kinds of adaptive algorithms, WL beamformers always show faster convergence rates and higher steady state SINRs. CMV-based CG algorithms (CMV-CCG and WL-CMV-MCG) have close performances with corresponding RLS algorithms (CMV-RLS and WL-CMV-RLS). Moreover, CCM-based CG algorithms (CCM-CCG and WL-CCM-MCG) show outstanding performances in both conventional linear and WL algorithms, which further demonstrate the superiority of CCM criterion.

Output SINR versus number of snapshots in Scenario 1.
We can see that both the LSCMA and WL-LSCMA cannot converge correctly to the optimal SINRs in Figure 3, because both the desired signal and interferences are constant modulus signals and the power of interferences is much higher than that of the desired signal. In the simulation of Figure 4 we use the same parameters used in Figure 3 under Scenario 2 shown in Table 2. The only difference is that the power of the interferences is 10 dB lower than that of the desired signal. It is shown that both the constrained and unconstrained CMAs and WL-CMAs can converge to the optimal SINRs rapidly. However, the interferences are always much stronger than the desired signal in practice; thus the unconstrained CMA will fail to work.

Output SINR versus number of snapshots in Scenario 2.
In practice, nonrectangular pulse shaping is usually adopted for BPSK signals to reduce the bandwidth occupation. The BPSK signal will not be CM unless it is appropriately match-filtered and baud-synchronously sampled [42]. In Figure 5, the convergence performances of the proposed WL-CCM-MCG algorithm with Nyquist pulse shaping filter and symbol timing error are evaluated. Firstly, we assume that the desired signal is properly match-filtered and sampled without symbol timing error. Thus a raised cosine filter with 1/2 roll-off coefficient is used here. The setup of Scenario 1 shown in Table 2 is used as usual. We denote the curves with “Same-rate” for the case where all of the desired signal and interferences have the same symbol rate and with “Different-rates” for the case where all of them have different rates in Figure 5. For the latter case, the symbol rate of the desired signal is assumed to be

Convergence curves of WL-CCM-MCG algorithm with 1/2 Nyquist pulse shaping filter.
Figure 6 shows the steady state beam patterns of several related algorithms, which are results of one run with the same scenario and parameters setup used in Figure 3. It can be seen that WL beamformers show narrower main lobes and more side lobes than conventional beamformers; that is why the formers can suppress more interferences. Besides, WL beamformers have lower side lobes, thus benefiting the suppression of spatial scatter noise.
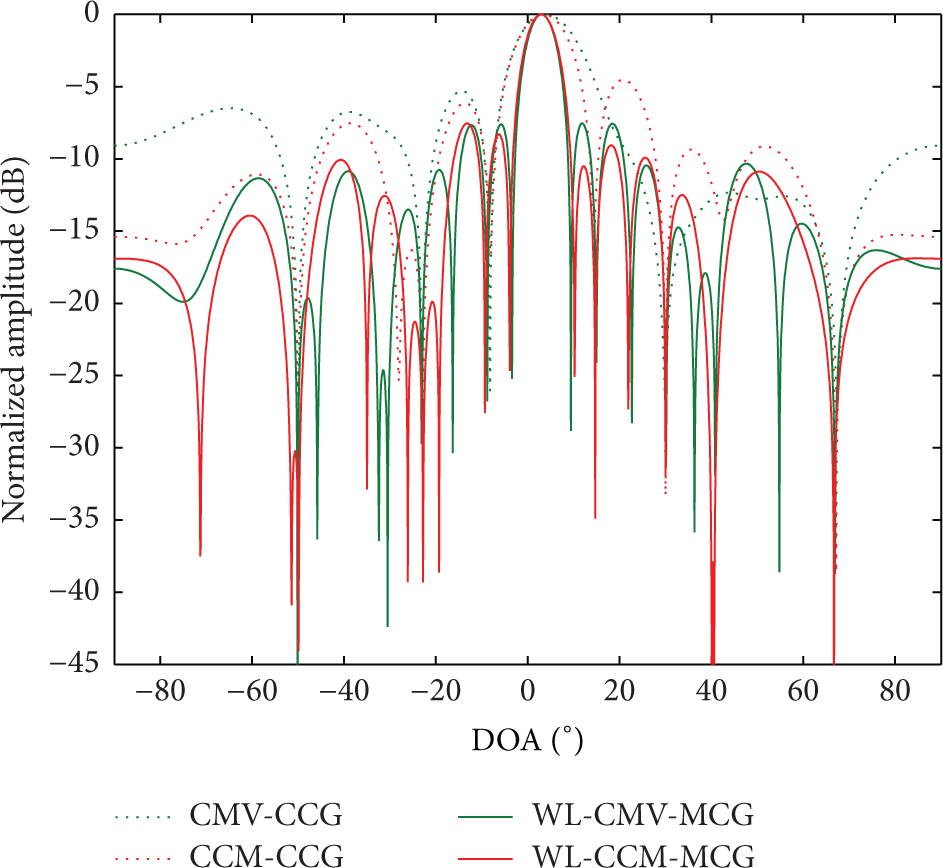
Comparison of beam patterns.
Next we evaluate the curves of steady state SINRs of the mentioned algorithms when input SNR increases. The simulation scenario and parameters setup are the same as used in Figure 3, and the results are shown in Figure 7. We can see that the SINRs of all algorithms increase with higher SNR, but the increasing rates decrease gradually, which is due to the heavier signal cancellation caused by larger component of the desired signal. The increasing rate of WL-CMV-MCG decreases most severely, while those of CCM-CCG and WL-CCM-MCG algorithms decrease slightly. The results show that with high SNR the performance improvements of WL-CMV-MCG and WL-CMV-RLS algorithms degrade, while CCM criterion based algorithms exhibit more robust performances.

Output SINR versus SNR of related algorithms.
Evaluation 2: Performances in Dynamic Environment. The performances in dynamic environment are also studied. In this simulation the scenario for the first 1~1000 samples is set as Scenario 1 shown in Table 2, while that for the following 1001~2000 samples is set as Scenario 3. That is, the DOAs of original interferences have a slight change, while two new interferences join in. From the results shown in Figure 8 we can see that the convergence rates of all the related algorithms decrease when the scenario changes, but those of the CMV-RLS and WL-CMV-MCG algorithms decrease more heavily, while the CCM-CCG and WL-CCM-MCG algorithms can still converge to the steady state level with faster rates. The results demonstrate that the CCM-based beamforming algorithms especially the WL-CCM-MCG algorithm have good robustness against the change of interference environments.

Output SINR versus snapshots in dynamic environment (from Scenario 1 to Scenario 3).
Evaluation 3: Performances versus Number of Interferences. In the simulation of Figure 9 the performances of related algorithms against the number of interferences are evaluated. One desired signal and several interferences are uniformly scattered among the whole direction of the array's broadside with the desired signal incoming from the centermost direction. Theoretically the WL beamformer can suppress up to
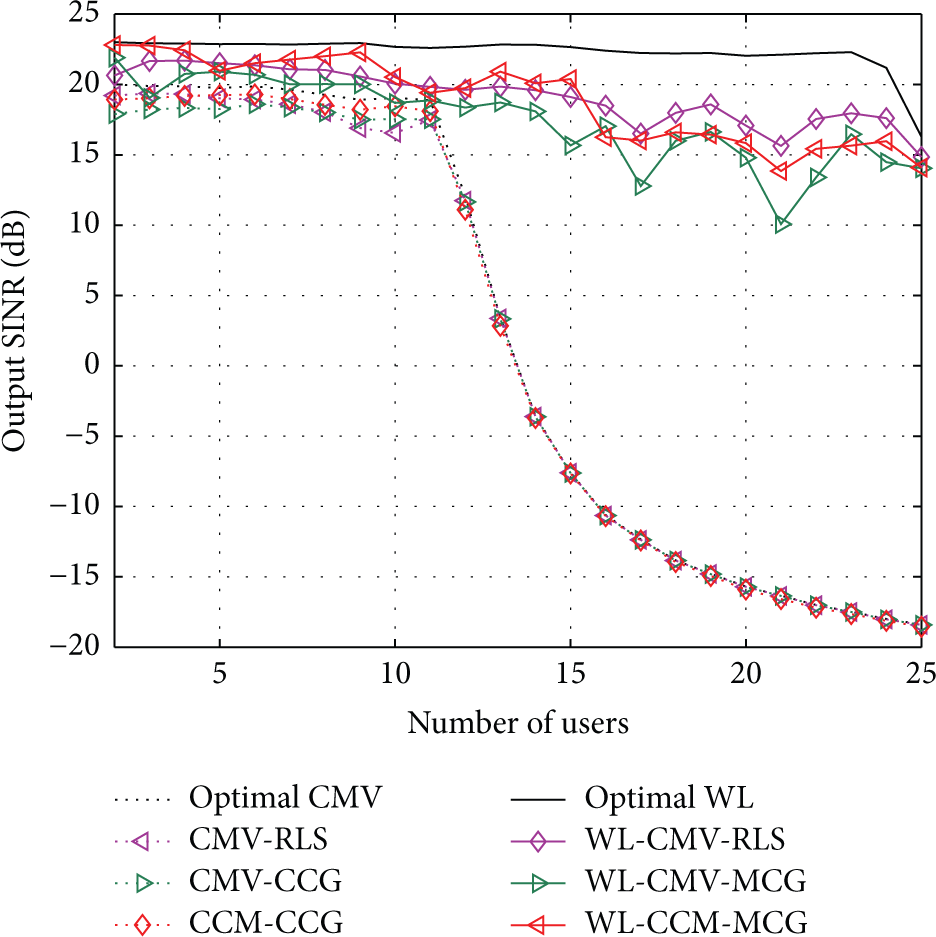
Output SINR versus the number of users.
Evaluation 4: Performances with Frequency Offsets. In the following simulation, the performances of proposed algorithms with different Doppler frequency offsets are evaluated. Firstly only the offset of the desired signal is considered. The performances with conjugate cyclostationarity exploited are also shown, which are denoted with the prefix “CYC-” in Figures 10 and 11. In the simulation, we assume that the orbit height of the satellite is 600 km, and the carrier frequency is 1.5 GHz; then the maximum Doppler frequency offset is about 35 kHz and the maximum changing rate of that is about 440 Hz/s. Scenario 1 given in Table 2 and the same parameters used in Figure 3 are adopted here. The sampling rate is set as 35 MHz. From the results of Figures 10 and 11 we can see that with frequency offset both the WL-CMV-MCG and WL-CCM-MCG algorithms show slow convergence rates and unstable performances after many iterations. When the conjugate cyclostationarity is exploited, the performances are evidently improved. Although with slower convergence rates, the steady state performances still remain much more superior.

Performance of WL-CMV-MCG algorithm with frequency offset.

Performance of WL-CCM-MCG algorithm with frequency offset.
Next, we consider the case where both the desired signal and interferences have different residual frequency offsets. To facilitate the simulation, we consider the presence of one desired user with frequency offset of 35 kHz and one interference with frequency offset of 20 kHz; that is,
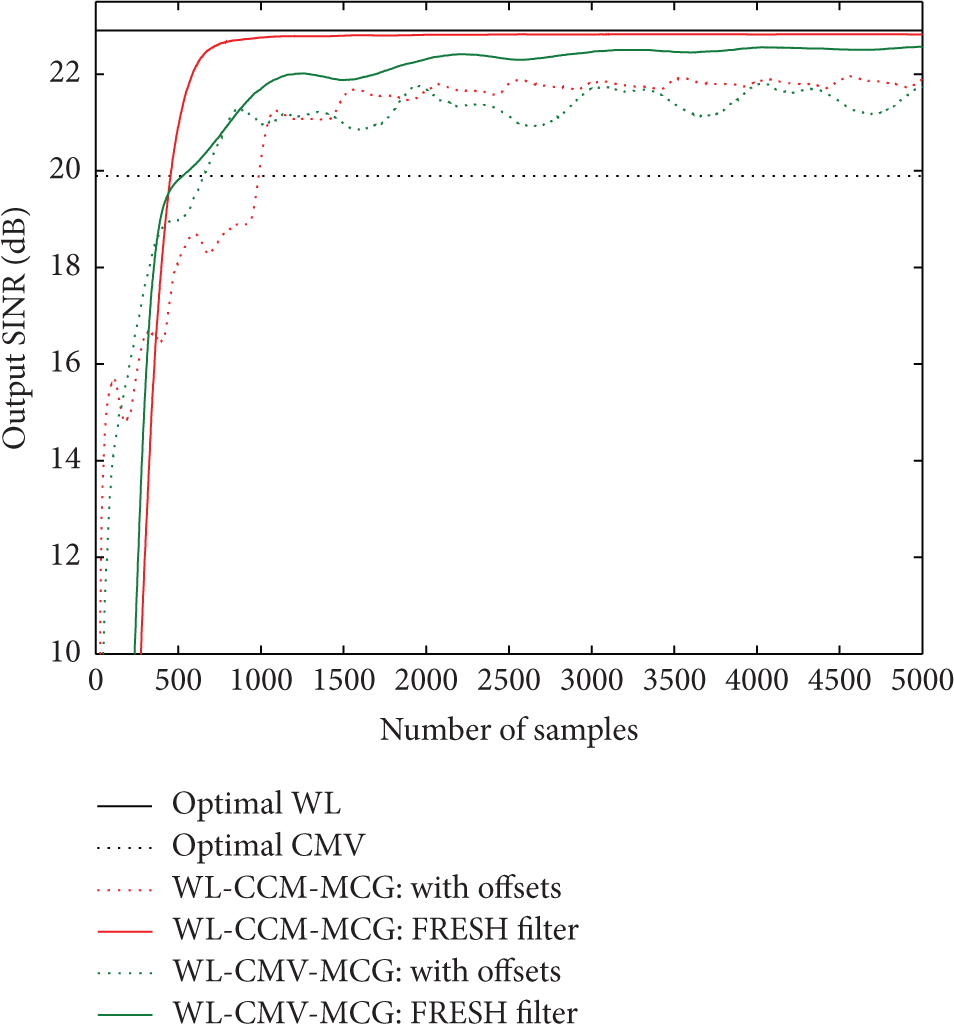
Performances of proposed algorithms with different frequency offsets of users.
Evaluation 5: Performances with DOA Mismatch. Next we study the performances of related algorithms when DOA mismatch of the desired signal exists. The simulation scenario is the same as Scenario 1 shown in Table 2, except that the DOA of desired signal has 1° mismatch. Results are shown in Figure 13. We can see that the convergence rates and steady state performances of CCG-based and RLS-based conventional beamformers are close, while those of MCG-based and RLS-based WL beamformers still show remarkable improvement. It is worth noting that the WL-CCM-MCG algorithm always show superior performance over others.

Convergence performance of related algorithms with 1° DOA mismatch.
In Figure 14 the output SINRs versus the DOA mismatch of the desired User 0 are simulated. As a comparison the performance of sample matrix inversion (SMI) beamformer with data length
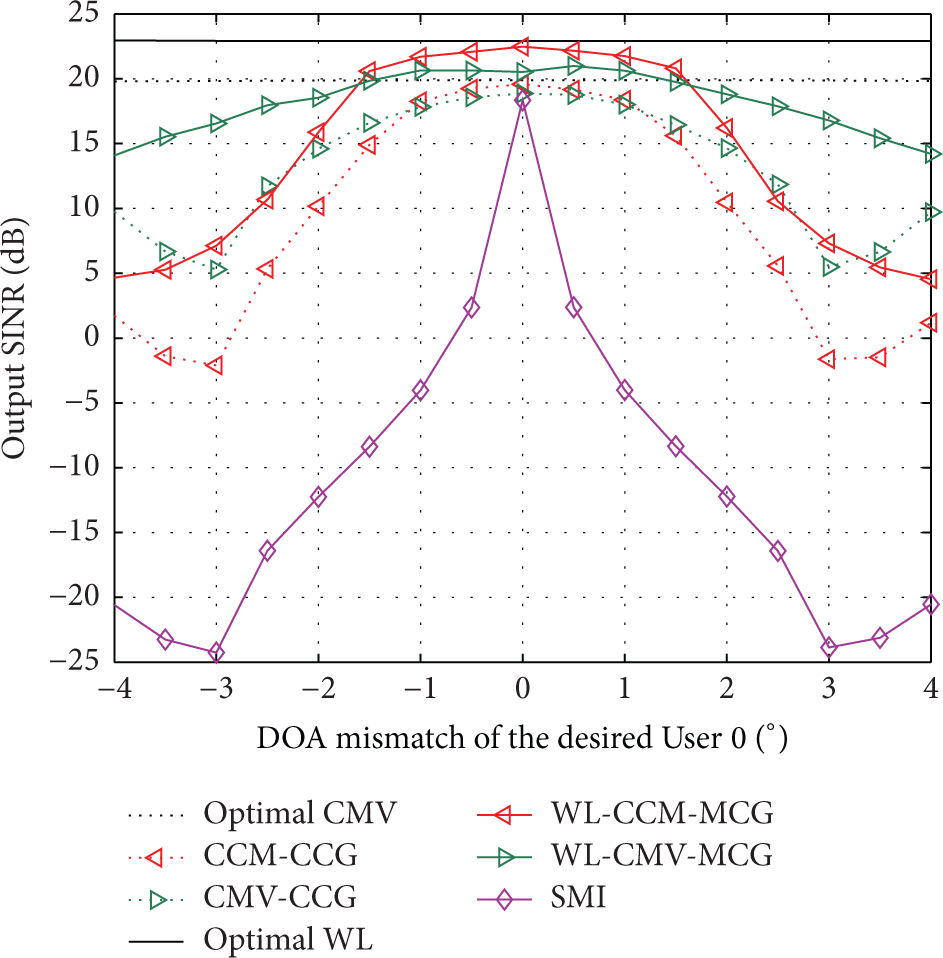
Output SINR versus DOA mismatch of the desired user.
Evaluation 6: Performances versus Noncircularity Coefficient Estimation Error. At last we study the effect of estimation error of the desired signal's noncircularity coefficient on the performances of WL beamforming algorithms. For WL beamformers, the noncircularity coefficient of the desired signal should be estimated by training sequence or blind identification algorithm when it cannot be a priori known. All the simulations above are conducted in ideal environment; however the performance will degrade with estimation error. Still use the Scenario 1 shown in Table 2, and first we simulate the effect of estimated noncircularity rate. Assuming that the noncircularity phase of the desired signal is 0° and known, the actual noncircularity rate is 1. Figure 15 gives the curves of SINR versus estimated noncircularity rate with WL beamformers. Then we study the effect of estimated noncircularity phase and assume that the noncircularity rate is 1 and known, while the actual noncircularity phase is 0°. Figure 16 gives the curves of SINR versus estimated noncircularity phase with WL beamformers.

SINR versus estimated noncircularity rate.

SINR versus estimated noncircularity phase.
We can see that the performance deteriorations of WL-CMV-MCG and WL-CCM-MCG algorithms are slight when the error of estimated noncircularity rate is below 15% and that of estimated noncircularity phase is within ±30°. When out of these ranges, slow degradations can be observed. However, for WL-CMV-RLS algorithm, fast degradations appear when estimation error of noncircularity rate increases and estimation error of noncircularity phase is above ±10°. It is apparent that the proposed WL-CMV-MCG and WL-CCM-MCG algorithms show better robustness against estimation error of noncircularity coefficient, which have notable advantages when noncircularity coefficient is difficult to estimate accurately.
7. Conclusions
In the scenario of LEO satellite distributed sensor data acquisition application, the design of WL beamformers based on CMV and CCM criteria is presented. Compared with conventional beamforming and WL RLS beamforming algorithms, the proposed algorithms show superior performances in convergence rate and robustness against nonstationary environment, DOA mismatch, and estimation error of noncircularity coefficient. Meanwhile, the computational complexity is reduced with the usage of modified CG algorithm to ensure convergence with one iteration per sample. Second-order local approximation is conducted on CCM-based WL beamforming algorithm so that the complexity approximates to that of CMV-based algorithm and the convexity can be guaranteed by adjusting the constraint on the desired signal's response. The only drawbacks of the proposed algorithms lie in the fact that auxiliary DOA determination methods are demanded. Besides, appropriate compensation measures should also be considered to deal with the unexpected frequency offsets. Fortunately, abundant auxiliary information can be employed in satellite-borne applications to overcome the drawbacks, which is also a feasible way with limited onboard resources.
Footnotes
Appendix
Competing Interests
The authors declare that there are no competing interests regarding the publication of this paper.
Acknowledgments
This paper is supported by the Natural Science Foundation of China (no. 61401278).