
Abstract
In this study, an interval extension method of a bi-iterative is proposed to determine a moving source. This method is developed by utilising the time difference of arrival and frequency difference of arrival measurements of a signals received from several receivers. Unlike the standard Gaussian noise model, the time difference of arrival - frequency difference of arrival measurements are obtained by interval enclosing, which avoids convergence and initialisation problems in the conventional Taylor-series method. Using the bi-iterative strategy, the algorithm can alternately calculate the position and velocity of the moving source in interval vector form. Simulation results indicate that the proposed scheme significantly outperforms other methods, and approaches the Cramer-Rao lower bound at a sufficiently high noise level before the threshold effect occurs. Moreover, the interval widths of the results provide the confidence degree of the estimate.
Keywords
Introduction
Passive source localisation based on time difference of arrival (TDOA) and frequency difference of arrival (FDOA) measurements has become a topic of interest owing to its wide application in radar, 1 navigation, 2 interference localisation, 3 and wireless networks. 4 For the high nonlinearity implied in the measurement equations, many available methods for solving TDOA- and FDOA-based moving source localisation have been proposed. The traditional method in Foy, 5 and Lu and Ho 6 linearises the equations via Taylor-series expansion. Two drawbacks must also be considered. First, an initial solution is required to obtain the source estimate. Second, the convergence is not guaranteed. To avoid these issues, researchers have investigated algebraic methods, which allow the independence of the initial estimate and have high computationally efficient. 7 Among these methods, the two-step weight least-square (TSWLS) method,8,9 is popular, and can provide an algebraic solution without an initial guess. Interestingly, the closed-form result of the TSWLS reaches the Cramer-Rao lower bound (CRLB) at the low-noise level. However, it shows poor localisation accuracy when the target approaches the axis of the reference sensor. The method discussed in, Zou and Liu 10 and Zhou, et al. 11 is proposed to transform the maximum likelihood estimator problem into a convex optimisation problem, but its results are more robust at high computational complexity. The CTLS algorithm 12 overcomes the problem that the total least squares algorithm cannot achieve the optimal solution when the noise components are statistically correlated, and can achieve CRLB when the measurement noise is moderate. However, due to the influence of the target and the location distribution of the external radiation source, the coefficient matrix may have ill-conditioned problems, resulting in huge fluctuations in the results of the equation solution due to small observation errors, and degrading the performance of the CTLS algorithm. The bi-iterative technique recently proposed in, Zhu and Feng 13 and Zhu et al. 14 can reduce the computational cost by alternately calculating the source location and velocity. The mentioned methods assume that the TDOA and FDOA noises both accord with the Gaussian distribution. They only provide the point estimates of the source position and velocity, and not a confidence interval.
From the Taylor-series expansion, this work derives the interval extension of the bi-iterative method for a moving source localisation based on the bounded error framework. The proposed algorithm combines the interval analysis technique in, Abdallah et al., 15 and Jaulin and Walter 16 with a bi-iterative strategy13,14 to estimate the target position and velocity. Compared to the traditional iterative method, the novel scheme obtains estimations of the source in interval vector form, which has a 95% probability 17 of containing the true vales. It allows global convergence and avoids the initialisation problem. Furthermore, the interval widths of the results provide the estimated confidence.
The rest of this paper is organised as follows: Section 2 defines the symbols and notations. Section 3 discusses the measurement model. The details of the interval analysis-based bi-iterative algorithm are shown in Section 4. Section 5 deduces the CRLB and the mean square error (MSE) of the source location and velocity estimates. Section 6 provides the simulation results, and valuable conclusions are presented in Section 7.
Symbols and notations
We denote the punctual column vectors and matrices in bold lower and upper-case letters, respectively. For
In the interval number system,
To operate on the interval, we extend the basic calculation of the floating-point numbers and the set operations, such as +, −, *, ÷, ∩ and ∪, into the interval analysis.
18
The interval correspondence of functions is usually impossible to calculate. Thus, the concept of inclusion function is proposed. The inclusion function
Measurements model
We consider a scenario of
The accurate TDOA measurement between sensor pair i (

where

is the distance from the target to the ith sensor, and c is the signal propagation speed.
Similarly, the FDOA measurement between sensor i (

where

is the time derivative of (2), and
Through the combination of equations (1) and (3), the TDOA and FDOA measurements are modelled as


where


where
To simplifying the noise error calculation, equation (6a) and (6b) can be transformed into the interval forms in accordance with the 3-sigma principle. 17 The updated equations can be obtained as


where
Localisation algorithm
Let

where

where
First, we consider the situation where the target velocity

where


In addition, Jacobian matrix

and the derivation of partial derivative

where the (i-1)th rows of (


In accordance with equation (10), the least square (LS) estimator of

where
Given that

The inverse of (
Therefore, we simplify

Second, we consider another situation where source position



Jacobian matrix

and partial derivative (

where


According to equation (18), we can obtain the LS estimator of the source velocity, as shown in

where
Similar to the solution process of

Then,

On the basis of the above description,
CRLB and performance analysis
CRLB
CRLB is the boundary of the unbiased estimation of variance. The results in this section are valid if the measurement noises are Gaussian, and their covariance matrices are known. Based on equation (6a) and (6b), the CRLB of the moving source localisation problem equals the inverse of the Fisher information matrix (FIM), 20 as shown in

where the Jacobian matrix

and the derivation of the partial derivative (

Thus, the position estimation accuracy of the proposed method is nearly identical to the CRLB under low noise conditions.
Performance analysis
In this subsection, we deduce the MSE of the source location and velocity estimates through the Taylor-series method at low TDOA and FDOA measurement noise levels. If the iteration procedure in the localisation algorithm is terminated, then we can obtain the one-order Taylor-series expansion
21
at approximately

where

The covariance matrix of

Thus, the position and velocity estimation accuracy of the proposed method is nearly identical to the CRLB under low noise conditions. When the noise increases, the developed algorithm cannot guarantee the high accuracy of position and velocity estimation results, but the interval results can still estimate the range of the target position and velocity. Therefore, the proposed method provides anther idea for target localisation in high noise conditions.
Simulation
In this section, a set of Monte Carlo simulations evaluate the performance of the proposed algorithm by comparing it with TSWLS 8 and the maximum likelihood (ML) estimator 23 and CTLS. 12
The localisation accuracy is evaluated in terms of the root mean square error (RMSE) and bias of the source location and velocity. The estimation bias in terms of the norm of estimation bias is defined as
The localisation scenario in Zhu and Feng
13
is used. The scenario has an array of five sensors; their positions and velocities are listed in Table 1. The TDOA and FDOA measurements are generated by adding zero-mean Gaussian noises with the covariance matrix
The position (in metres) and velocities (in metres/second) of the sensors.

Near-field scenario
In the near-field case, the true position and velocity of the target are
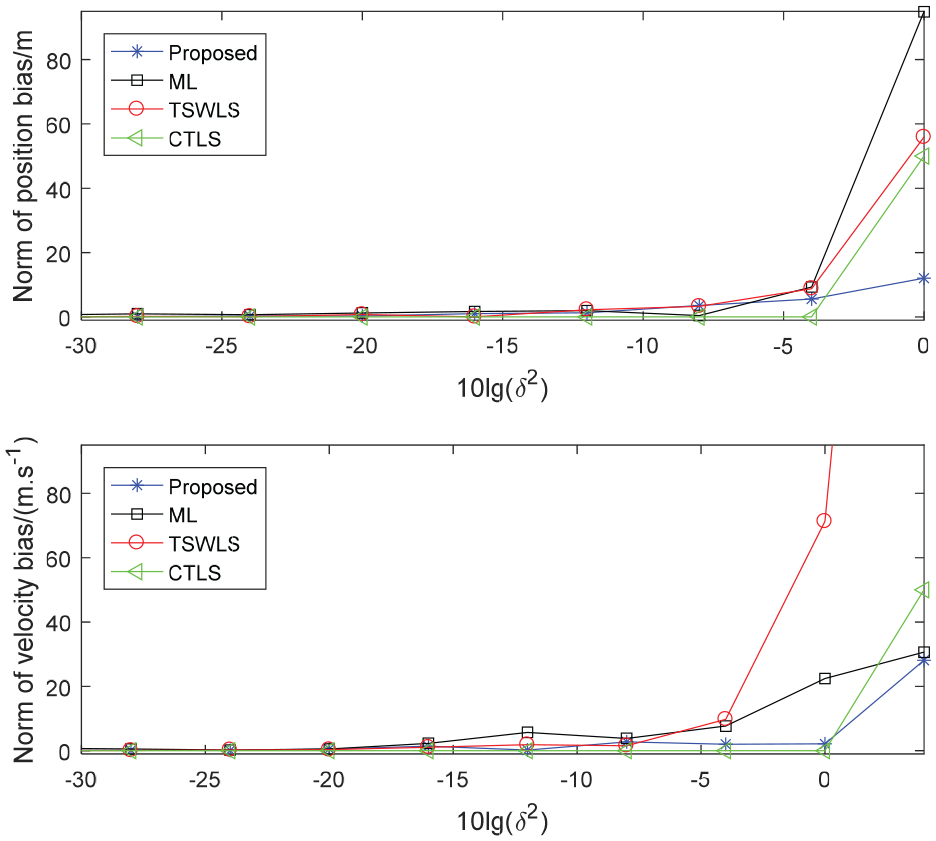
Figure 1 shows that the estimation bias norm of the proposed method is significantly smaller than those of TSWLS, ML and CTLS, especially for high measurement noise levels.

Comparison of the estimation bias of the proposed estimator with TSWLS and ML versus measurement error for target located at (280, 325, 275) m.
Figure 2 plots the accuracy of the position and velocity estimates of TSWLS, ML, CTLS and the proposed method, in terms of the RMSE with increasing
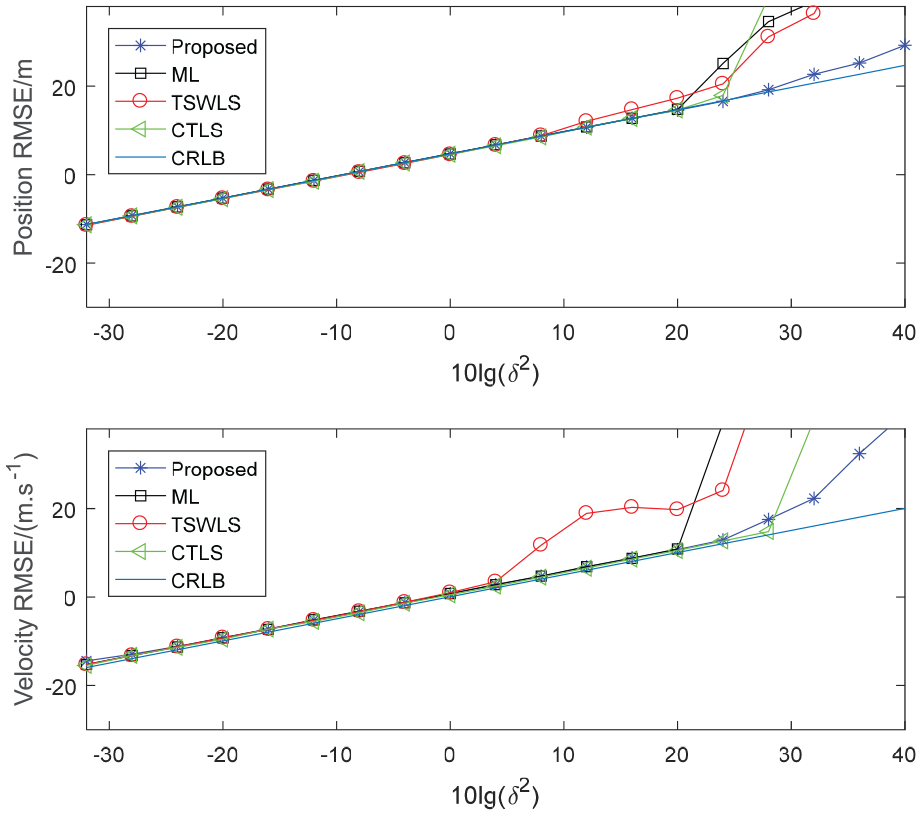
Comparison of RMSE of the proposed estimator with TSWLS, ML and the CRLB versus measurement error for target located at (280, 325, 275) m.
Far-field scenario
In the far-field case, we set the true target position
Figure 3 depicts that the estimation bias norms of the four methods in the far-field case are more unstable than those in the near-field case, but the location and velocity estimation biases of the proposed algorithm are relatively small even at the high measurement noise level.
Comparison of the estimation bias of the proposed estimator with TSWLS and ML versus measurement error for target located at (1000, 1500, 2000) m.
As shown in Figure 4, the accuracy of the position and velocity estimates of TSWLS, ML, CTLS and the proposed method also decrease in terms of RMSE with increasing
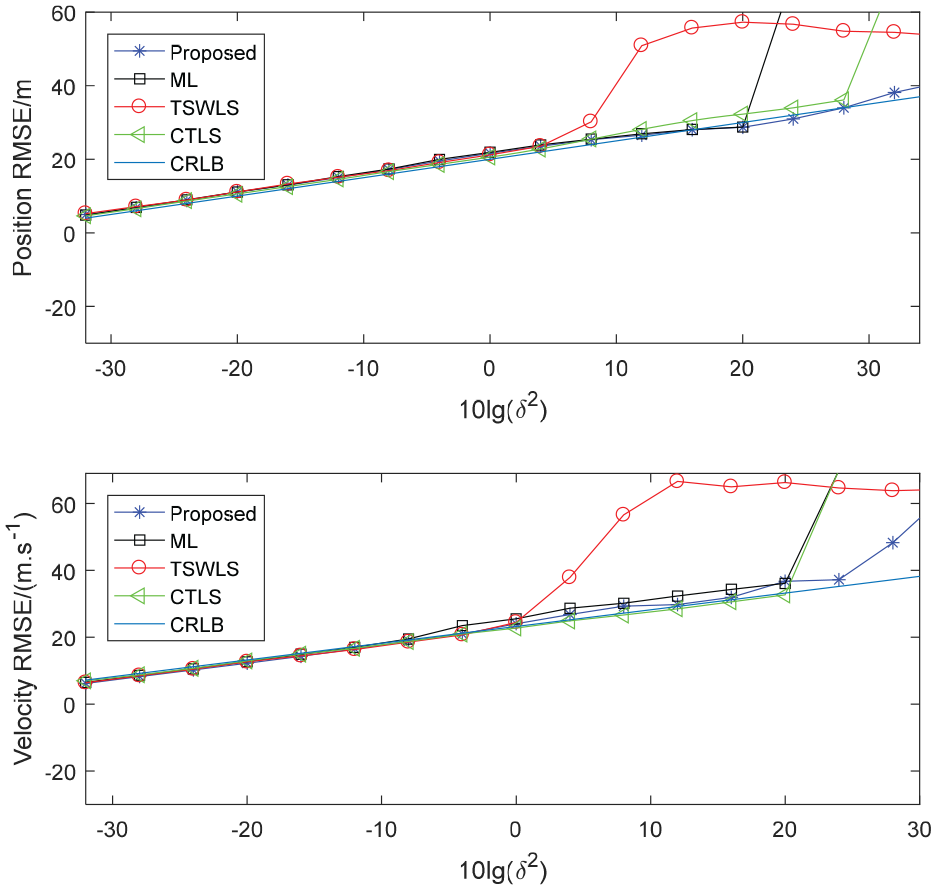
Comparison of RMSE of the proposed estimator with TSWLS, ML and the CRLB versus measurement error for target located at (1000, 1500, 2000) m.
Confidence probability
For source location and velocity estimations, the proposed method can not only provide a point estimate, but also the confidence interval. When the simulation scenario and parameter settings are consistent with the near-field case, the algorithm provides the interval vector of the position and velocity of the source, that is.,
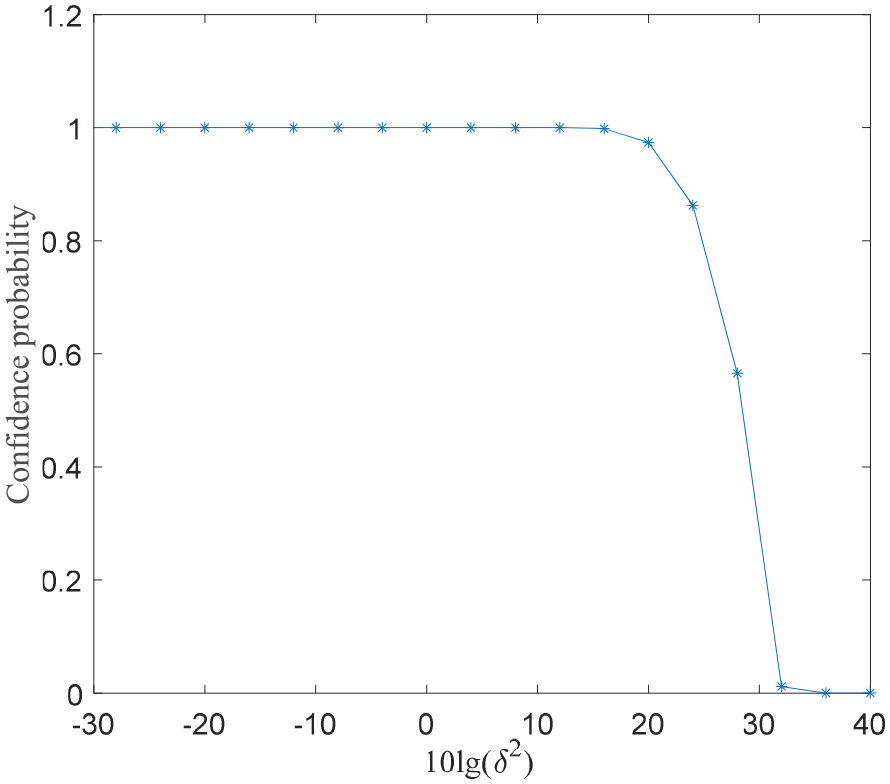
Confidence probability of the proposed algorithm.
The specific boundaries of the location and velocity estimates of the proposed method in the X-axis are also shown in Figure 6. When

Estimation boundary of position and velocity of the proposed estimator.
Computational complexity
In this paper, the multiplicative times of four algorithms are used as a measure of computational complexity. As shown in Table 2, TSWLS and CTLS have the same computational complexity
The computational complexity of four algorithms.
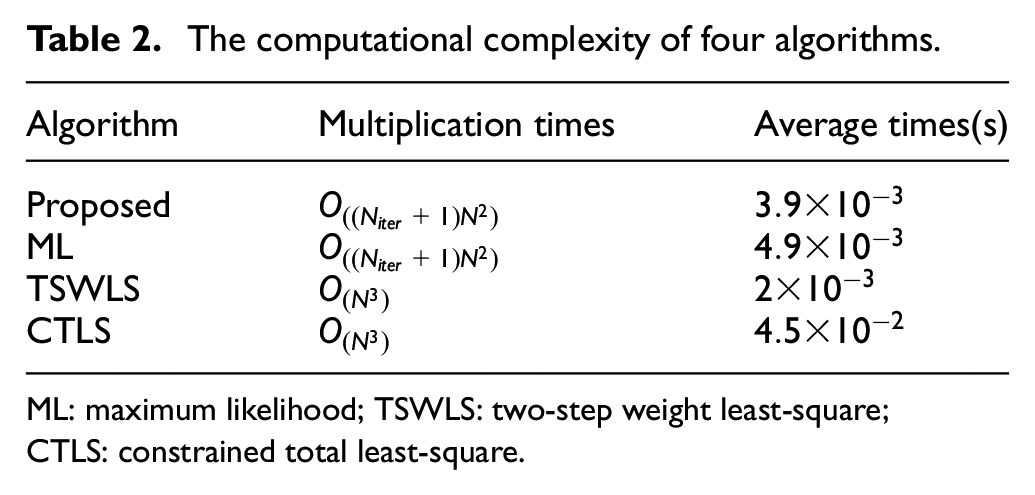
ML: maximum likelihood; TSWLS: two-step weight least-square; CTLS: constrained total least-square.
Conclusion
In this study, we consider the problem of estimating a moving source using the TDOA-FDOA measurements obtained from multiple sensors based on the bounded error framework. By combining interval analysis with a bi-iterative strategy, we develop an efficient method that alternately calculates the source position and velocity interval vectors that enclose the true values. Simulation results show that the algorithm has superior performance over other methods and approaches the CRLB at a sufficiently high noise level.
Footnotes
Acknowledgements
The authors give their thanks to editors and the anonymous reviewers for the valuable comments and suggestions.
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: All the authors appreciate the supports from the National Natural Science Foundation of China, No.61702228, 61803183, 61304264, the Natural Science Foundation of Jiangsu Province, No.BK20170198, BK20180591, Jiangsu Planned Projects for Postdoctoral Research Funds, No.1601012A, the Fundamental Research Funds for the Central Universities, No.JUSRP1805XNC and the 111 Project (B12018), The Open Fund of Key Laboratory of Dynamic Cognitive System of Electromagnetic Spectrum Space of Ministry of Industry and Information Technology (Grant No. KF20202104).