
Abstract
In smart systems, attackers can use botnets to launch different cyber attack activities against the Internet of Things. The traditional methods of detecting botnets commonly used machine learning algorithms, and it is difficult to detect and control botnets in a network because of unbalanced traffic data. In this article, we present a novel and highly efficient botnet detection method based on an autoencoder neural network in cooperation with decision trees on a given network. The deep flow inspection method and statistical analysis are first applied as a feature selection technique to select relevant features, which are used to characterize the communication-related behavior between network nodes. Then, the autoencoder neural network for feature selection is used to improve the efficiency of model construction. Finally, Tomek-Recursion Borderline Synthetic Minority Oversampling Technique generates additional minority samples to achieve class balance, and an improved gradient boosting decision tree algorithm is used to train and establish an abnormal traffic detection model to improve the detection of unbalanced botnet data. The results of experiments on the ISCX-botnet traffic dataset show that the proposed method achieved better botnet detection performance with 99.10% recall, 99.20% accuracy, 99.1% F1 score, and 99.0% area under the curve.
Introduction
A botnet is defined as a network of robots, and these robots may be smart systems on the Internet. 1 They are remotely commanded by a botmaster, also called a command and control (C&C) server. These smart systems can carry out malicious attacks on key targets by sending spam, phishing, stealing information, and by the distributed denial of service (DDoS). 2 Because of their ability to spread malware, botnets can cause significant damage. For example, the botnets Mirai and Brickerbot have been used to launch DDoS attacks on IoT devices. 3 Botnets are usually difficult to detect, and are highly stable and difficult to kill when they reach a certain scale. Therefore, it is important to detect and prevent botnets before they multiply.
Owing to the continual evolution of botnet behavior, previously proposed detection methods, such as blacklisting and botnet signature matching, cannot be used to accurately detect them. 4 The blacklist ensures a potent defense only against known and emerging cyberthreats. For example, such blacklists were publicly listed in FireHOL, 5 but botnets often change their network connections, IP addresses, and domain names to evade detection. Thus, identifying them based on blacklists is limited in effectiveness. Botnet signature matching uses packet payload search and matching features to analyze botnet data and alert the user when malicious patterns are found. However, signature-based botnet detection methods are computationally expensive, and are not scalable to the amount of data generated by botnets on high-speed networks. For example, Snort-intrusion detection system (IDS) rules use only payload byte signatures of known botnets to identify C&C channels in network traffic. 6 In addition, in case an encrypted C&C protocol is used, the payload data become irrelevant, and it becomes meaningless to capture features of the payload mode. Payload analysis cannot be used to identify encrypted or obscure C&C protocols.
Botnets can be deployed in a centralized, decentralized, or hybrid manner depending on their C&C architecture. 7 They use different communication protocols, such as IRC, HTTP, P2P, and IM. The centralized C&C structure based on IRC is popular and has been widely used. Zombies in this structure need to communicate with their botmaster (i.e. C&C) to receive commands, update their status, or filter critical data. The connective activity of zombies constitutes a special behavior, and some dodge bots have even been discovered by modeling the communication-related activities of botnets.8,9 While communicating with the C&C server, the bot generates a unified communication mode of streaming. Botnet traffic can be identified by extracting traces of the underlying modes of communication-related activity. 10
An analysis of the mechanism of operation of the botnet makes it clear that each attack requires a long period of deployment, and to hide the zombies, the controller does not hinder their normal operation or issue an attack command in the initial stage of control. It needs to only detect the zombies before the scale of its attack expands. 11 The best period for botnet detection is the C&C phase of the attack because it lasts the longest, and instructions are mostly sent automatically by the host computer program. The characteristics of communication are the most prominent, and can provide a sufficient duration and basis for analysis. 12 However, the number of abnormal samples in botnet traffic data is much smaller than that of normal samples. The imbalance significantly degrades the performance of machine learning (ML)-based data training models, thus affecting the accuracy of botnet detection.
Early botnet detection mainly relied on blacklist or whitelist method, although the botnet detection accuracy of this method is high, but the ability to detecting unknown attacks is weak. In recent years, the botnet detection methods based on ML and neural network have become research hotspots. The basic idea is based on network traffic characteristics, and then applies these characteristics to build a model of identifying normal and abnormal traffic. These methods have the advantage of discovering unknown attacks. Unbalanced data refer to data samples with much more normal traffic data than abnormal data, and the proportion of abnormal features is too small, which easily leads to the performance degradation of existing detection models, and even cannot detect abnormal traffic. In this article, the resampling strategy is improved, and the Tomek-Recursion Borderline Synthetic Minority Oversampling Technique (T-RBSMOTE) resampling algorithm based on integration strategy is proposed, which can be used for highly unbalanced samples, effectively weaken the influence of sample imbalance and improve the detection effect.
In this article, we consider the attacking methods and behavioral characteristics of botnets, and proposes a botnet detection based on an autoencoder neural network in cooperation with the gradient boosting decision tree (GBDT) on a given network. The contributions of this article are summarized as follows:
The deep flow inspection method and statistical analysis are first applied as a feature selection (FS) technique to select relevant features, which are used to characterize the communication-related behavior between network nodes. Each vector data item contains more than 200 features that can be used for botnet traffic detection;
The autoencoder neural network algorithm is used to improve the efficiency of model construction. It reduces the number of data dimensions and the amount of requisite calculations, which helps deal with challenges in updating the model and inaccurate results cased by training the original data.
Sampling is improved by developing the T-RBSMOTE resampling algorithm based on an integrated strategy to solve the problem of sample imbalance, 13 which weakens the impact of sample imbalance and improves the detection of botnets.
The rest of the article is organized as follows: Section “Related work” explores related works on botnet detection. Section “Background” introduces the background of the used algorithm in our method. Section “Overall design of botnet detection algorithm” introduces the overall framework for botnet detection. Section “Experimental results and analysis” presents our evaluation methodology and experimental setup using real world ISCX-botnet traffic data. Section “Experimental results and analysis” describes the results of our experiments. Section “Conclusion and future work” presents our conclusions and future work.
Related work
In recent years, the dynamic and static analyses of malicious software have attracted extensive attention from both academia and industry. An accurate and efficient identification of botnets is the aim of this research. To identify botnets more efficient, feature-based methods of detecting payload data and ML algorithms have been introduced. This class of methods identifies botnets by extracting features from network traffic produced in the connection between the C&C server and the botnet.14,15
Haddadi et al. 16 compared the effects of five botnet detection methods. Three of these methods use ML algorithms on different feature sets, including packet payload-based and network traffic-based features. The results of comparative experiments show that traffic-based features, such as interval features, are the most representative of the botnet communication model. Drasa et al. 17 elaborated on FS for anomaly detection and evaluated the impact of traffic-based features on improving the accuracy of detection. ML has significant advantages in terms of automatically extracting representative and distinguishable features from botnet datasets. They do not need any prior information about the botnet traffic, such as the communication protocol and heartbeat interval (e.g. the round-trip data packet sent to the robot to maintain the connection between the C&C server and the robot).
The supervised ML method is an effective method that is widely used to solve multi-classification tasks in different application scenarios. It is used to build a classification model from a labeled training dataset. Stevanovic and Pedersen 18 introduced a traffic-based botnet detection method that uses 39 characteristics of traffic (such as source port, destination port, standard deviation of packet size, and traffic duration) to model malicious traffic. They evaluated eight supervised ML algorithms, including naive Bayes (NB) classifier, decision tree (DT), support vector machine (SVM), Bayesian network classifier (BNet), and logistic regression. According to the results, the accuracy of the random forest algorithm in terms of identifying botnets was 95.7%. Chen et al. 19 focused on the use of supervised ML algorithms to detect botnets in high-speed complex networks. They combined the characteristics of traffic and sessions to build a classification model, conducted experiments using the CTU-13 dataset, and analyzed the performance of different ML algorithms.
Kirubavathi and Anitha 20 proposed a botnet detection method based on traffic characteristics and the supervised ML method to model network traffic behavior. The features were extracted from information provided by small data packets sent and received, such as the ratio of incoming and outgoing data packets, the initial length of each data packet, and the ratio of the bot response data packet to the all data packets in the flow. But these three characteristics may not fully represent patterns of behaviors of botnets, and the reliability of the results of detection needs to be evaluated by using more representative knowledge and features.
Nogueira et al. 21 and Salvador et al. 22 proposed a botnet detection method based on characteristic traffic patterns. They used artificial neural networks (ANNs) as classification method to distinguish between malicious and normal traffic patterns. This method can be used to generate alarms and trigger security-related actions in response. However, the triggered operations are not autonomous, and require the approval of security experts. Because there is no description of the feature set of the ANN for detecting botnets and the size of each application category in the dataset, the results of detection cannot be widely used.
Due to the impact of the range and scale of botnet traffic, packet payload detection is computationally expensive and inefficient, and thus, traffic-based features have been widely studied. To examine the connection-related interactions between the C&C server and bots, Alauthaman et al. 7 defined six rules to select the required data packets to reduce the number of data packets that need to be analyzed and avoid encrypted data streams. Given that the duration of the connection is 30 s, 29 Transmission Control Protocol (TCP) features were extracted, and a classification regression tree was proposed that used entropy-related impurities of a given node to determine the next node that needed to be visited. This method yielded an accuracy of botnet detection of 98.32%, an F-measure of 98.69%, and a false positive rate of 0.75% on the ISOT and ISCX datasets. Sheikhan and Jadidi 23 used traffic-based detection to reduce the data volume and processing time for packet-based intrusion detection in high-speed links. An ANN and a multilayer perceptron neural network were used to detect untrained attacks, and an improved gravity search algorithm (MGSA) was used to adjust the weights of interconnection of the detectors of neural anomalies. Functions of the dataset included the number of data packets per flow, the size of each flow, flow duration, source and destination ports, TCP flags, and IP protocol. This traffic-based method yielded an accuracy of 97.76% in terms of classifying anomalies in a test dataset.
Livadas et al.
24
proposed a supervised botnet detection method to identify the C&C traffic of the Internet Relay Chat (IRC) botnet. They recommended a set of features for identifying network traffic, including flow duration, the average number of packets per second of flow, and the byte variance of each packet per flow. They first used classification techniques,
McKay et al.
25
used
Unlike the above-mentioned botnet detection methods, in this article, we design a novel and highly efficient botnet detection algorithm based on network traffic analysis of smart systems. Our novel botnet detection algorithm considers not only the problem of high dimensionality but also the imbalance problem of traffic data. Our method combines the autoencoder neural network and an improved T-RBSMOTE resampling algorithm which can better solve the problem of unbalanced botnet data.
Background
Autoencoder model
An autoencoder is an unsupervised learning model that is mainly used for data dimension reduction or feature extraction. The characteristics of autoencoders are useful in the fields of image recognition and natural language processing. An autoencoder uses back propagation algorithm to make the output value equal to the input value. It compresses the input into potential spatial representation, and then reconstructs the output through this representation. In other words, each layer in the autoencoder model retains as much information on the original data as possible. However, changes in the number of neurons will cause changes in data dimensions. 27
The general structure of the autoencoder model is shown in Figure 1. It consists of an encoder and a decoder. Taking the original sample

General structure of the autoencoder model.
The number of dimensions of the network traffic data used in this article is smaller than the number of dimensions of other data, such as images. There is no need to design a complicated network structure for the network traffic data, and its computational burden is light.
The GBDT model
The integrated ML algorithm has stronger anti-noise capability than traditional algorithms, is less prone to over-fitting, and has better detection. Compared with commonly used deep learning algorithms, it has higher training efficiency, is convenient for frequent and rapid iterative updates, and is more suitable for network traffic analysis with high-frequency changes in data.
The GBDT algorithm is used as classification algorithm here. It is an integrated learning algorithm that outputs an assessment value for each sample in a given dataset that is the sum of the values of all classification and regression trees (CART). In a multi-classification problem, an assessment value can be generated for each class. The value of a given sample is one if it belongs to the class, and is otherwise zero. The closer the output result is to one, the more likely it is to belong to the given class.
Before constructing each subtree, the algorithm first randomly samples the data to generate a training subset, randomly selects a certain feature subset, and uses it and the training subset to train the subtree. This sampling method ensures that some samples in the training set of each subtree have not been used before. Therefore, it can reduce the amount of calculation needed, guarantee the diversity of the subtrees, and improve the effects of classification and the anti-interference capability. A gradient boosting algorithm is also used. Each iteration adds a subtree to the network, and calculates the gradient according to the difference between the predicted value of the model in the previous iteration and the actual value. The CART is trained through accumulation so that the model gradually approaches the optimal result. 29 The GDBT training model is shown in Figure 2.

The training process of the GBDT model.
Overall design of botnet detection algorithm
To effectively detect bots with more accuracy, we propose a novel detection algorithm based on an autoencoder neural network in cooperation with DTs. Network traffic is divided into normal and botnet traffic by the trained ML model. As shown in Figure 3, the proposed algorithm contains three main parts. The first part involves preprocessing data on the original traffic to make it usable by ML algorithms. The main functions of this part include information extraction, data format conversion, and data cleaning. Traffic-related features of the data are extracted and transformed into a multi-dimensional vector. The second part involves FS. The autoencoder is used to reduce the data dimensionality in the preprocessing step. The third part is to feature the classification model, and apply the resampling strategy T-RBSMOTE to improve the training of the GBDT model, which can obtain the optimal training model.

Overall design of botnet detection algorithm.
Preprocessing flow data
To extract features of the data, we use packet capture of headers to convert the original traffic data into vector data suitable for ML algorithms, and we store it in the hexadecimal PCAP format. The PCAP data content and the PCAP data format are shown in Figure 4. The original traffic data cannot represent communication-related behavior, and further processing is needed. The communication among zombies is automatically completed by the corresponding scripts, and each zombie receives the same command to perform large-scale malicious acts; the interval and load of data transmission are more regular than those of normal users. The classification method based on transmission interval and payload has produced good results, and botnet programs can be adjusted to avoid it. Therefore, we not only consider the basic time and size information but also do statistical analysis to obtain other available features, such as quantile, mean, and variance of arrival interval.

PCAP data, including (a) PCAP data content and (b) PCAP data format.
We divide the process of feature extraction into two stages. The first stage is the aggregation and transformation of the data, which is necessary for DNA fragmentation index (DFI) analysis, 30 and the process is performed using Scapy in Python. The second stage involves data cleaning and data preprocessing. The process of data feature extraction is shown in Figure 5, which begins with filtering User Datagram Protocol (UDP) traffic and ends with statistical analysis of spatial and temporal information.

Data feature extraction.
Data grouping aggregation based on DFI analysis
Owing to the large amount of original data and a wider variety of data types, if the original data stream is analyzed and processed directly, part of the data will become interference factors, which reduces the analysis efficiency. When designing DFI analysis, our algorithm integrates the original data packets into the data stream, which is defined as continuous data packets generated by zombie communication. A quintuple is usually used to represent a data stream. It is represented by
Extracting information from the data header can help avoid scanning the content of the data payload and ensure data privacy. However, the information contained in a single data packet is limited. This algorithm thus extracts a large amount of temporal and spatial statistical information from each group after grouping the aggregation to enrich the available features and reduce the amount of data that subsequently need to be processed.
In our proposed algorithm, we first extract the IP address and protocol information “proto” by Scapy. If proto = 7, it is the TCP protocol, and if proto = 17, it is the UDP protocol. The port information is then obtained from the data frame header of the transport layer protocol, the information on the quintuple is obtained, and the data packets are grouped into the same quintuple. Then, the timestamps are extracted, and the data packets of each group are sorted in chronological order. For TCP data packets, the flag information is first obtained. SYN marks the start of an instance of communication, and FIN marks the end of the communication and the data packets between the groups form a complete stream. Because there is no confirmation mechanism in the UDP protocol, it cannot be used to implement a botnet, and thus UDP traffic is discarded. Once the one-way flow integration has been completed, flows in the two directions in the same communication instance will be integrated according to the quintuple and timestamp, so as to extract features from subsequent data flows.
Data stream feature extraction based on statistical analysis
Once the data packets are aggregated, the content payload of each packet is discarded, and only the header is used to extract and retain the valid information of each packet, including its length, time, IP address, and port. Statistical analysis is carried out on the information of each group of streams at the same time, and the information is converted into a feature vector and stored in comma-separated values (CSVs) format. The algorithm in this article extracts a total of 500,000 data streams from 4.9-GB raw data, and each data stream contains 248 features. 32 Table 1 shows the general categories of all features and their contents. The final data format is shown in Figure 6. Information about the IP address cannot be used as the basis for judgment in the detection system, but once the detection is completed, it can be used to search for zombie hosts.
Feature classification and meaning.


Vectorized data format.
Data cleaning and preprocessing
The feature vector obtained initially faces some problems, such as missing attributes and infinite values, that require further data cleaning and preprocessing. The missing values and infinite values

The infinite values

where
Flow FS based on autoencoder
To maximize the extracted information through feature extraction, all available features are extracted. The obtained data features are usually complex such that it is impossible to judge their relevance to the classification. That is to say, they may contain noise that affects the judgment of the algorithm as well as its classification, which in turn may lead to feature redundancy and cause a “dimension disaster.” On one hand, because the sample distribution in the high-dimensional space is sparse, the algorithm cannot obtain an accurate classification boundary. On the other hand, high-dimensional data increase computational complexity. More relevant features can be identified through feature screening or data dimensionality reduction. Feature screening methods directly discard features and cannot retain all information, and traditional methods of reducing data dimensionality have the problem of requiring a large of computational resources, and are inconvenient to update. In this article, the simple structure of the autoencoder neural network algorithm is used for the efficient reduction of the dimensions of flow data.
To obtain the encoder, a complete autoencoder network needs to be trained. The process is shown in Figure 7 and the main steps are as follows:
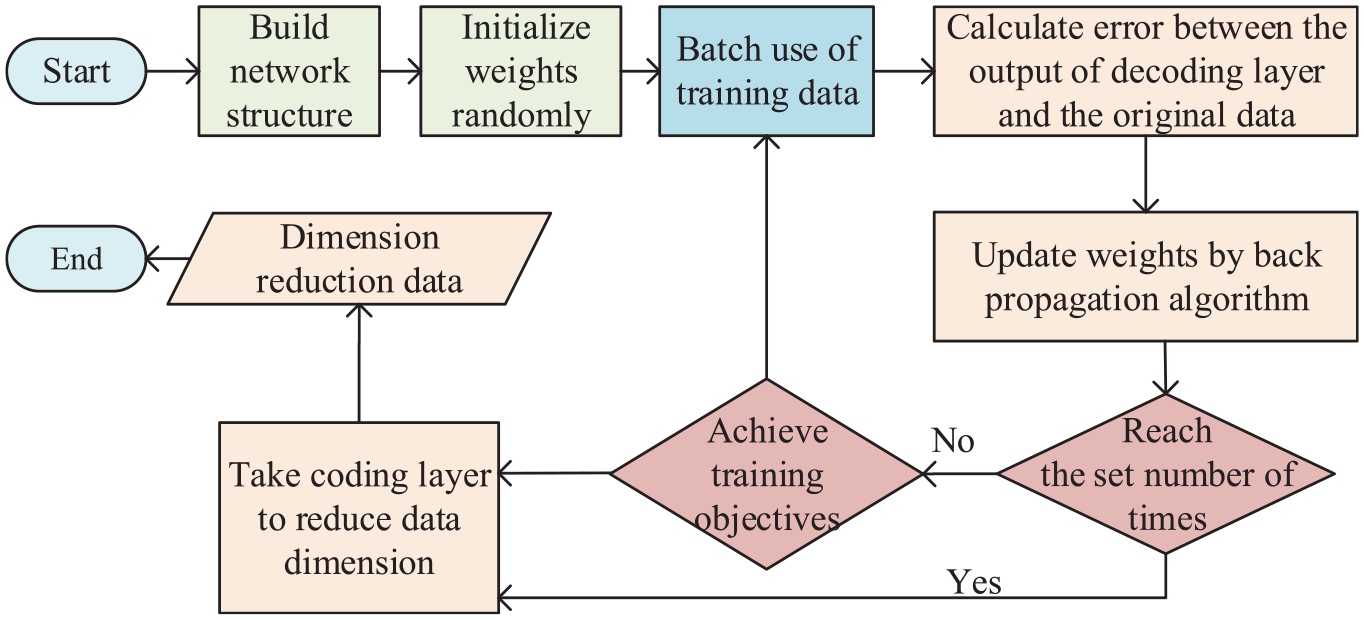
Flow chart of autoencoder feature dimension reduction.
The first step involves defining the network structure. The neural network structure can be implemented in PyTorch, a deep learning framework developed for scientific research. It has a useful modular function to quickly implement the design of the neural network. Use the sequential class in PyTorch to configure the parameters of each layer from top to bottom, and create the encoder and decoder, respectively. The output of the encoder is used as the input to the decoder. Set the input layer to linear and the number of units to 248, identical to the number of dimensions of the data. The hidden layer is set to sigmoid and the number of units can be adjusted; the output layer is linear and its number of units is also fixed at 248.
The second step features the initialization of the parameters. When the input data are unchanged, all parameters are updated from zero. Because the weights are computed through back propagation errors, the same training results are obtained regardless of the order of the data input. Therefore, it is necessary to assign initial values to all parameters at the beginning of training that obeys a normal distribution, and the size of ò can be adjusted; it is usually set to 0.01. After each initialization, record the seed that generates a random number and use it to obtain the same initial network parameters.
The third step involves training the model. Stochastic gradient descent is used for training, and the mini-batch training method is adopted. Each batch uses four samples to update the parameters as well as a varying learning rate to avoid falling into the local optimum.
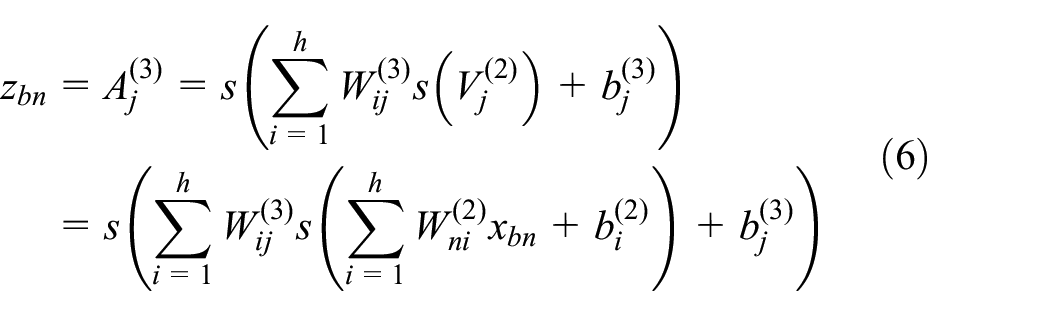
The loss function of the autoencoder is defined as the reconstruction error.
34
Assuming that the input is

The batch training method is used to update the model, and the loss function is thus expressed as

where

Then, the output corresponding to the sample is

The derivative of the loss function in formula 7, with respect to

The model parameters are updated according to the above steps until the loss function no longer decreases. When the loss function does not change after 50 consecutive iterations, the training is stopped.
The fourth step consists of FS. Once model training has been completed, use the encoder to process all the data and obtain compressed data as the output. In addition, the relative importance of each feature is obtained through the weight of each feature of the input layer after training.
Improved GBDT model based on resampling strategy
Analysis of the impact of unbalanced samples on GBDT model
The amount of abnormal data in the network environment is far less than the normal traffic, which will lead to an extreme data imbalance. In this case, most algorithms learn a large number of samples of a certain type, while ignoring the classification accuracy of the other samples. Especially in the GBDT algorithm, data imbalance will affect the splitting of the tree nodes. Due to an insufficient number of samples, there are fewer nodes in the subtree, which cannot form an effective classification structure. 35
According to formula 4, when the parameters are updated, it is not the actual loss function, but its approximate expression is used to solve the gradient. The approximate expression is the sum of losses in all samples. Therefore, even if a certain gradient direction has a great loss reduction to a few classes, if the loss reduction of most classes of samples is smaller than that of other directions, it will not be the optimal gradient after final summation due to the number of reasons. At this time, most samples play an important role in the optimization process, which weakens the influence of a few samples on the algorithm.
On the contrary, the GBDT algorithm draws on the idea of generating a bootstrap subtraining set of random forest. For unbalanced data, the subtree training set obtained by this method encounters the same problem of imbalance as the original set. According to the splitting criterion used in the tree algorithm, the splitting index is related to the respective ratios of different types of samples. 36 To prevent over-fitting in the training process, node splitting can be performed only when the judgment index is greater than a set threshold. When the sample is extremely unbalanced, the value of this index is very small and new nodes cannot be correctly generated.
On the whole, when the data are unbalanced, the algorithm cannot learn sample-related information. This leads to the model having a good classification effect for the majority class but a poor one for the minority class of samples. This article proposes an integrated T-RBSMOTE algorithm to improve the training process of the GBDT algorithm.
Integrated T-RBSMOTE sampling
The integrated T-RBSMOTE sampling is used in the training process of the GBDT algorithm. The main steps are shown in Figure 8. Once the training set for each subtree has been obtained through random sampling, the ratio of abnormal samples is calculated. If the threshold of this ratio is reached, proceed directly to the next step; if the ratio is lower than the threshold, continue to randomly select abnormal samples from the original sample set and add them until the desired ratio is reached. Following this, a target ratio is set, the Tomek-links algorithm is used to delete the majority class of samples, redundant samples in the training set are eliminated, and Borderline-SMOTE is used to simulate and synthesize the abnormal samples. In view of the strong imbalance in data on botnet traffic, the required resampling ratio is also high. If the original sample is directly used for resampling, repeated synthetic samples may be generated. Therefore, by recursively using the Borderline-SMOTE algorithm, the generated sample is added to the original set once its size is twice that of the original sample, and sample synthesis is continued. The process stops when the sample ratio of the subtraining set reaches the target value. This recursive resampling helps avoid the repeated use of samples, guarantees the diversity of the subtrees, and makes the ratio of abnormal data more reasonable and stable such that each subtree can learn enough sample-related information.
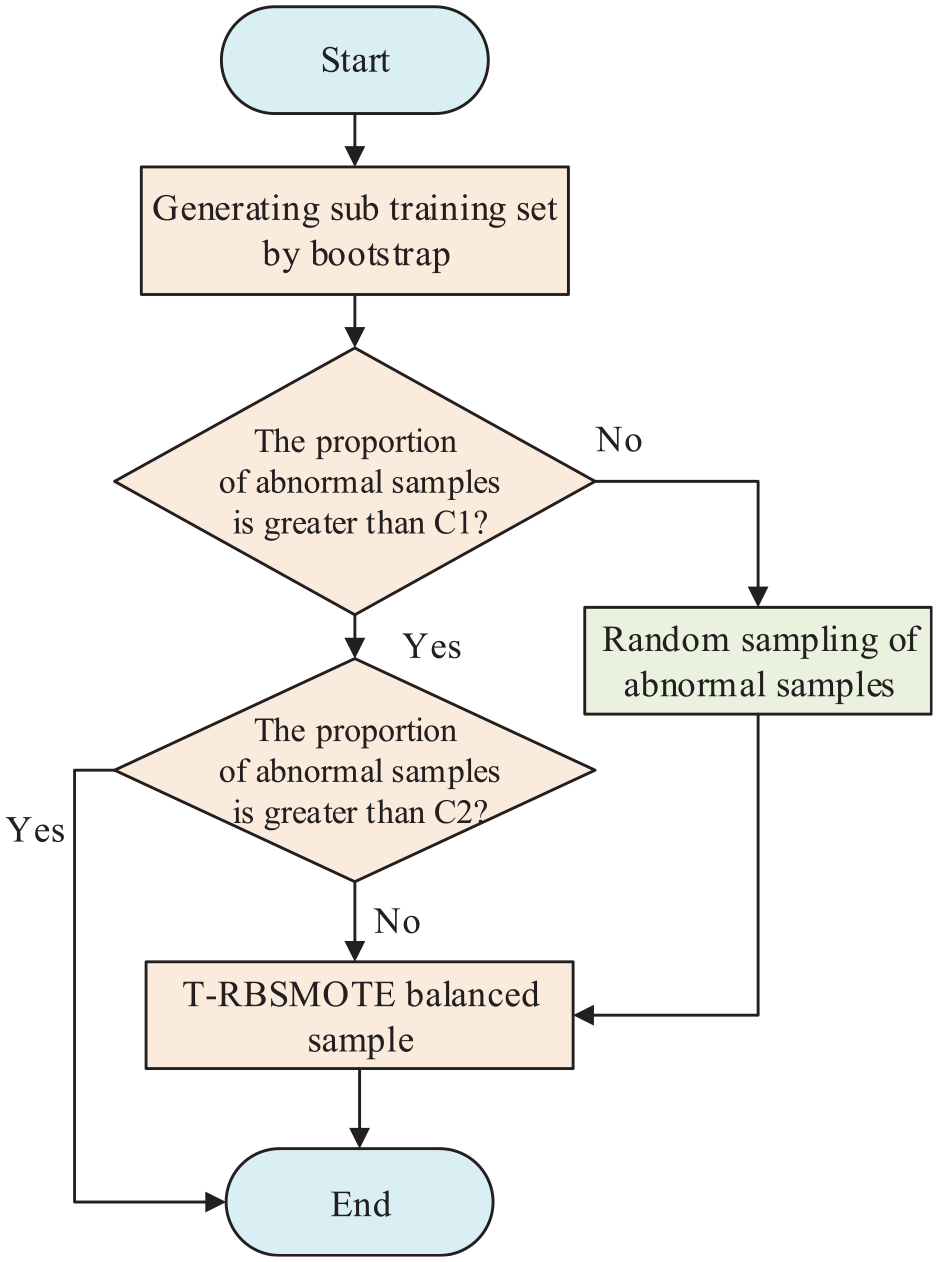
T-RBSMOTE resampling flow chart.
Experimental results and analysis
In this section, we present our results in evaluating the presented botnet detection approach.
Datasets and tools
This article uses the public ISCX-botnet dataset 37 to study the botnet detection algorithm. This dataset contains data collected in two intervals. Each dataset contained the original data packets of normal traffic and botnet communication. The difference was that a new type of sample was added to the latter part of the data. The ratios of various samples in the dataset are shown in Table 2. The ratio of the number of normal samples to that of abnormal samples was greater than 10:1, implying a significant imbalance. 38
Different sample proportion.

The experimental program code of the botnet detection algorithm was written in Python. Experiments are conducted on a MacBook 2018, and the libraries and related functions used in our experiment are shown in Table 3.
Tool library list.

Evaluation rules
The confusion matrix is generated according to the correctness of the results of classification, which is shown in Table 4. 39 Each item in the matrix represents the number of results in the corresponding scenario. Given a category, we can determine whether a sample belonged to it according to its label. If it did, its value is set to one or positive, and is otherwise set to zero or negative. The algorithmic model obtained by training could also be used to determine whether a given sample is positive or negative. If the judgment value is identical to the true value of the sample, the result of the judgment is true, and is otherwise false.
Confusion matrix.

TP: true positive; FN: false negative; FP: false positive; TN: true negative.
The classification results of the algorithm can be divided into four cases:
True positive (TP): The true value was positive, as was the judged value.
True negative (TN): The true value was negative, as was the judged value.
False negative (FN): The true value was positive but the judged value was negative.
False positive (FP): The true value was negative but and the judged value was positive.
We assess the proposed detection methods in terms of accuracy, recall, precision, F-measure, and stability. These evaluation rules are given by




In Formula 9d,
Experiment on data feature optimization
Preferences
In the training process, we not only get the parameters such as weight and deviation but also use a series of artificial preset parameters in various learning models, which are called superparameters. Superparameters that can be set in the autoencoder include the number of hidden layer units and coding layers. One, three, and five hidden layers are used to train the network, and the convergence performance and reconstruction error are recorded after the training process, as shown in Figure 9.

Comparison of reconstruction error curves of different layers.
Figure 9 shows that the three-hidden layer structure converges fastest with the smallest reconstruction error, while the five-hidden layer structure converges slowest with the largest reconstruction error. Therefore, we did not consider using a deeper network structure.
After analyzing the experiment with FS algorithm, a total of 10 feature dimensions were retained because the final number of data dimensions could not be less than 10. The number of coding units ranges from 11 to 15. According to a comparison of reconstruction error curves in Figure 10, it is obvious that the number of coding units has little effect on the reconstruction error. Considering the need to reduce the number of feature dimensions, 11 layers of coding units are determined to be the best choice.

Comparison of reconstruction error curves of different layers.
According to the above results, a network structure with three hidden layers and 11 units in the coding layer is used in subsequent experiments to reduce the number of dimensions of the features, that is, the optimized number of feature dimensions is 11.
Comparison of FS methods
The 20 most effective features are obtained using the weight of each feature of the input layer, as shown in Table 5. It is evident that port-related information is an important basis for judgment. Most of the other statistical features are influential, which shows that the features obtained by statistical analysis are effective.
Names and meanings of the top 20 important features.

The principal component analysis (PCA), kernel principal component analysis (KPCA), 41 random addition and deletion FS, and the method in this article are used to reduce the dimension of features, and then the GBDT model is trained by the feature data, and the classification accuracy is compared. To avoid random interference, a total of 30 experiments have been carried out. The comparison results are shown in Table 6. Each method finally obtains 10 or 11 features, indicating that they contain most of the information.
Comparison of different feature selection methods.

The first 10 features obtained by PCA, KPCA, and FS are shown in Table 7. It is clear that 80% of the important features overlapped with those obtained by the proposed method. This shows its usefulness for FS. By contrast, the features obtained by simple PCA could not guarantee accuracy, whereas the accuracies of feature screening and KPCA were higher, but they required longer calculation times. Compared with the two models, the model trained by features obtained using the proposed method had slightly higher classification accuracy and shorter calculation time. The neural network model thus obtained could be further updated afterward, which is suitable for anomaly detection.
The important characteristics obtained by other methods are analyzed.

PCA: principal component analysis; KPCA: kernel principal component analysis; FS: feature selection.
Experiment on classification algorithm
The main steps of this experiment were as follows:
According to the information on IP addresses, labeling the processed data categories to form a dataset, and divide it into a training set, a verification set, and a test set. Each dataset is used for model training, optimization, and testing.
The training set is used for unsupervised training of neural network of automatic encoder. The network obtained in this way is used to reduce the dimension of data, and they are input into the learning algorithm to train it. According to the characteristics of data and categories, the subtree is trained, and finally, the required classification model is obtained.
Evaluating the performance, adjusting the structure of neural network and parameters of GBDT model by cross-validation method to meet the target requirements, and storing the learned model.
Preliminary comparison experiment
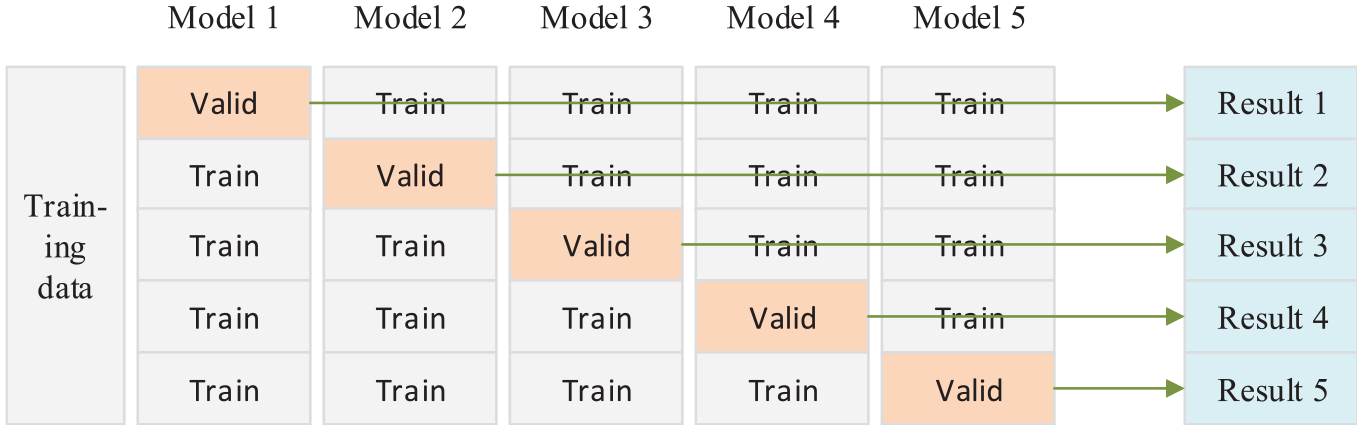
We carried out a preliminary comparative experiment on various algorithms and chose the best algorithm. Compared algorithms include NB, DT, SVM, k-nearest neighbor (KNN), and the improved GBDT algorithm proposed in this article. The first part of ISCX-botnet dataset is divided into a training set and a test set. The training set is used to train and optimize the model, and the test set is used to test its classification effect. The training set is used to construct the model using five-fold cross-validation, and the process of verification is shown in Figure 11. The training data are divided into five groups, and 20% of the data from each are used as the verification data. The other 80% of the data are used as the training set. A total of five groups of models and test results are obtained. If the group accuracy is not much different, the model with the best effect is selected. Then, we use the divided test set and the second part of ISCX-bot data to evaluate the effect of the model. The second part of the data is only used to test the stability of the algorithm to sample changes.
Cross-validation process.
To ensure the objectivity of the results of comparison, all data are processed in the same manner, and the hyperparameters of each algorithm are set to commonly used default values. The index used for comparison is the classification accuracy of each algorithm. The results are shown in Figure 12. The training times of the algorithms are compared when the sample sizes are 300,000; 400,000; and 500,000, as shown in Figure 13.
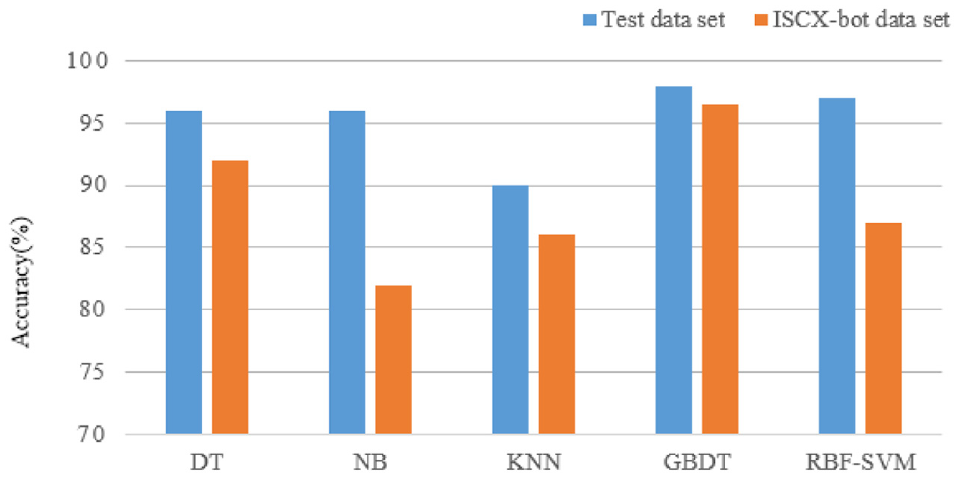
A comparison of accuracy of different algorithms.
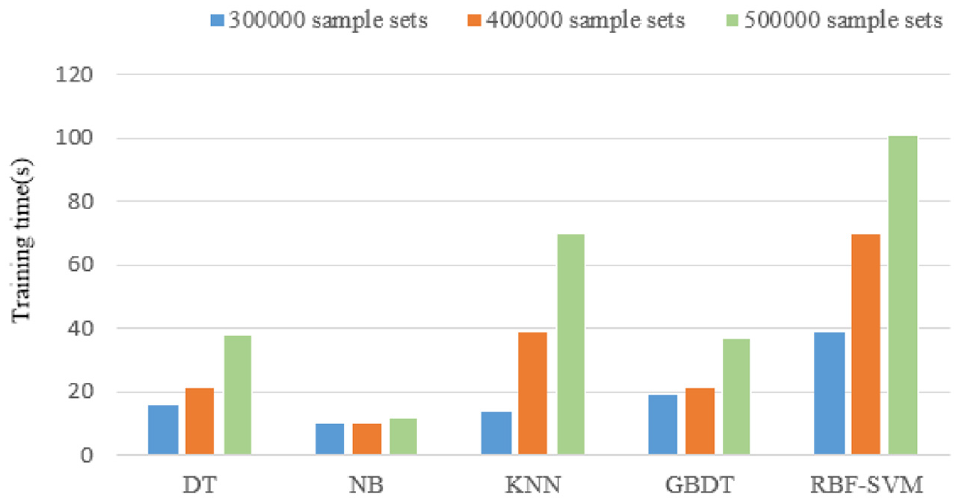
A comparison of training time of different algorithms.
The accuracy of GBDT records is very high; when the data changed, it maintains a good classification effect, and is stable. At the same time, its running time is shorter, even in case of changes in sample size. When the amount of data is large, it is faster than the other algorithms tested. According to these results, the GBDT algorithm has comprehensive advantages in terms of stability, accuracy, and the processing of large amounts of data. Therefore, it can better classify network traffic.
Optimizing hyperparameters of GBDT model
The principle of the GBDT algorithm is complex, and it includes many artificially set parameters. The main parameters include the learning rate

Accuracy and F1-measure’s variation chart about parameters. (a) Thermal chart of accuracy change. (b) Thermal chart of F1-measure change.
Figure 14 compares the overall accuracy and the geometric mean value of the F1-measure with changes in the parameters. It is evident that the parameter setting had little effect on accuracy, while the F1-measure was more significantly affected by it. This is because of the unreasonable parameter setting that caused the F1-measure of some categories of the algorithm to decrease, which affected the overall index. The algorithm maintained a good classification effect for normal samples that accounted for more than 90% of all samples. Therefore, its overall accuracy did not change by much. The experimental results show that when the learning rate was less than 0.05 or the number of subtrees was greater than 300, the performance of the algorithm did not change significantly. That is to say, the combination of these two parameters can simultaneously guarantee higher training efficiency and better classification performance. Thus, the most suitable parameters are
Analysis and comparison of resampling methods
The benchmark resampling methods ROS, RUS, and SMOTE-Tomek 43 are used on the two-dimensional sample data, and the sample ratio reaches 5:1. Comparison of the results leads to the change of sample distribution and classification boundary, as shown in Figure 15, where the red represents the majority class of samples.
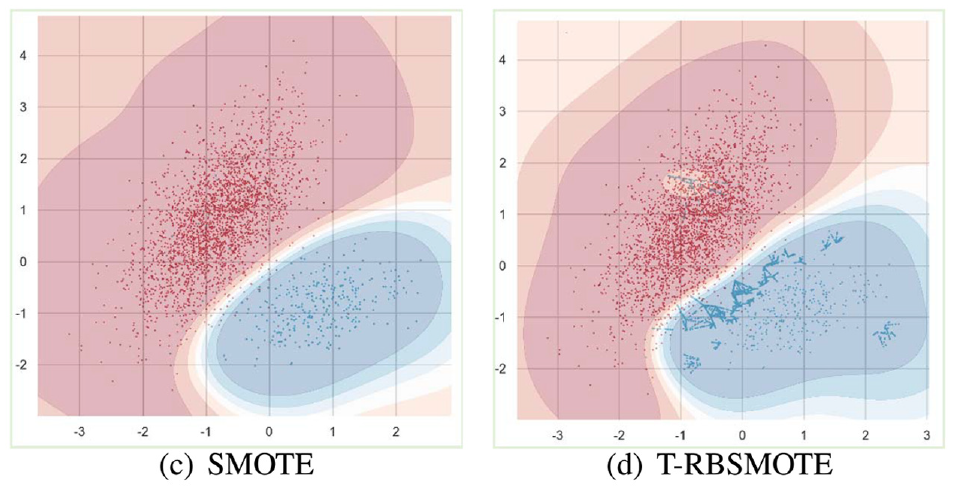
The change of decision boundary for two-dimensional sample data classification. (a) Original sample. (b) Tomek-Links. (c) SMOTE. (d) T-RBSMOTE.
Following SMOTE sampling, the classification boundary changed, and index of the results of classification of the algorithm improved. However, owing to the random selection of the sampling points, data repeatability was high. Tomek was used to reduce the sample density of the majority class, but the number of samples that could be deleted was limited. Thus, this did not have a significant impact on the classification model. The T-RBSMOTE algorithm resampled data only at the boundary points. We trained the new GBDT for classification and compared it with the original data, from which it is clear that the classification boundary shifted to the majority class such that more samples of the minority class were correctly divided.
We further explored the impact of resampling on the GBDT algorithm and analyzed changes in the number of subtree nodes during the experiment. The average numbers of nodes updated in 30 iterations using different resampling methods are shown in Figure 16.

Influence of different resampling strategies on the number of leaf nodes.
The use of Tomek-Links alone yielded almost no change in the number of nodes, whereas using SMOTE and T-RBSMOTE significantly increased the average number of nodes in the subtree. The impact of T-RBSMOTE was more significant, and the final number of average nodes changed from 11 to 26. This shows that when the minority classes were oversampled, the tree algorithm learned more sample-related information to form a more effective branch structure. The T-RBDMOTE algorithm used here thus achieved better results. We then used the test data to evaluate the classification performance of the model. We compared the performance of the GBDT model trained using the original samples with that when it was trained using different reconstruction samples. The recall rate, accuracy, and F1-measure of each category were compared as shown in Figure 17. It shows the performance of Tomek-Links, SMOTE, and T-RBSMOTE from left to right on the original data. The corresponding index values continued to increase. The changes in color show that the good ability of the model to identify normal traffic was maintained, and its detection of other categories significantly improved.
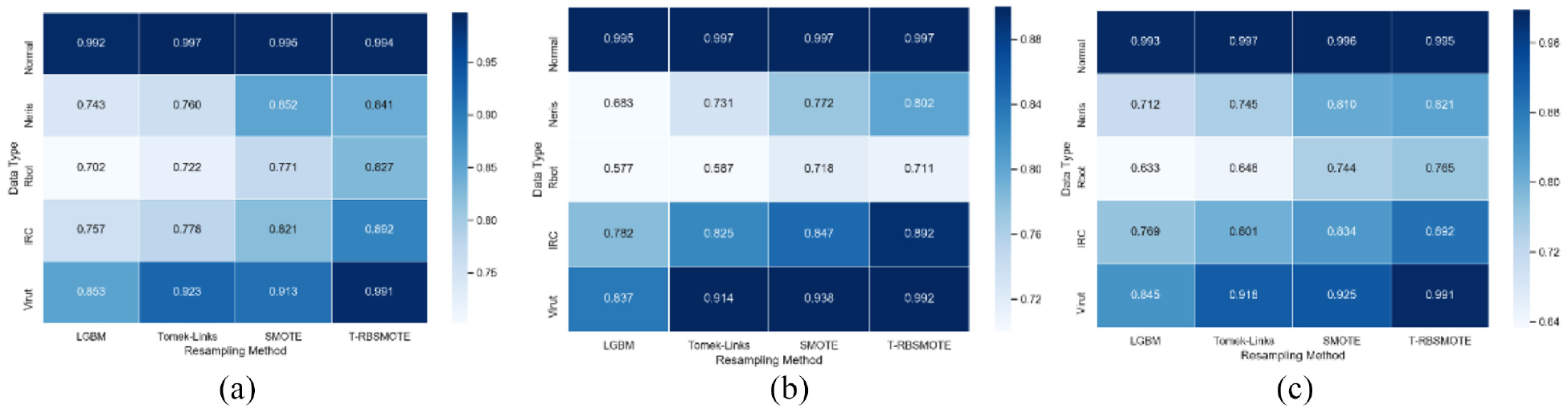
Effect comparison of GBDT model before and after resampling. (a) Recall. (b) Accuracy. (c) F1-measure.
A comparison of the ROC curves of the model before and after resampling is shown in Figure 18. The curve of each category becomes steeper, and the AUC is 0.99. This means that the model could simultaneously maintain a low false alarm rate and a high recognition rate. The overall accuracy also increases from 95.2% to 99.2%. The above results show that the proposed resampling algorithm can solve the problem of data imbalance and improve the performance of the trained model.
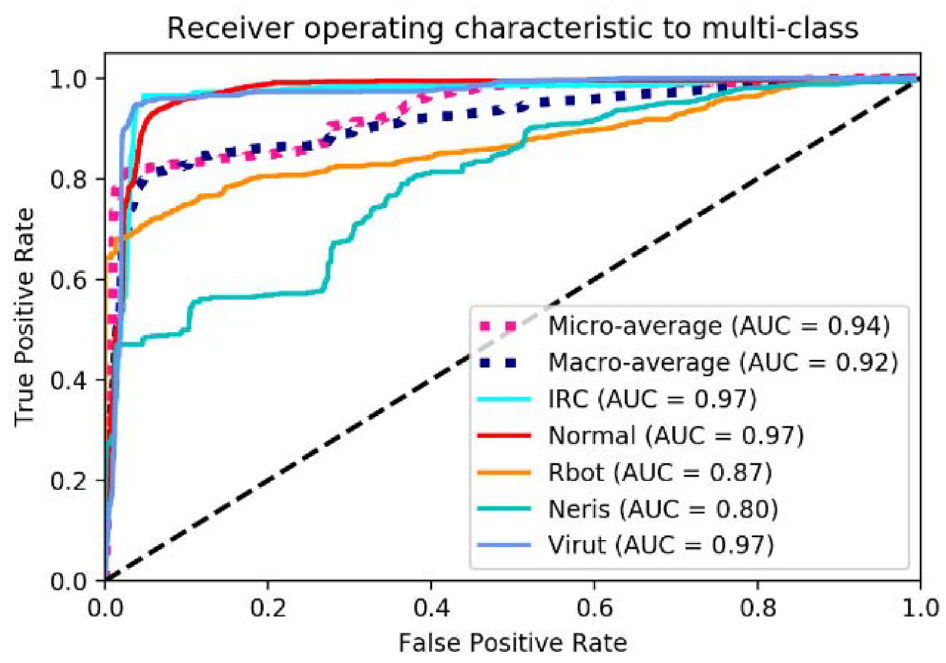
Comparison of ROC curves before and after resampling.
Conclusion and future work
This article proposed a novel botnet detection method for unbalanced traffic data in the communication network of smart systems, based on an autoencoder neural network in cooperation with DTs. The autoencoder neural network was used to optimize the characteristics of the traffic data, which can help accurately discover botnet activities. To overcome the shortcomings of existing feature dimension reduction methods, a feature dimension reduction method based on autoencoder neural network was proposed. To solve the problem of unbalanced traffic data samples, a GBDT training strategy T-RBSMOTE based on resampling was proposed to eliminate noise and reduce over-fitting. Simulation synthesis is used to make up for the shortage of abnormal samples and lack of information, increase the number of branches of tree nodes, and improve the classification effect. Finally, the results of experiments on the ISCX-botnet traffic dataset show that the proposed method achieved better botnet detection performance with 99.10% recall, 99.20% accuracy, 99.1% F1 score, and 99.0% AUC. The proposed resampling algorithm can solve the problem of data imbalance and improve the performance of the trained model. The limitation of this article focuses on offline traffic data, and does not consider the dynamic nature of traffic. For our future work, we will design a real-time online detection method based on different deep learning models to detect malicious network threats such as DDoS attacks.
Footnotes
Handling Editor: Peio Lopez Iturri
Author Note
Li Duan, is now affiliated to State Key of Laboratory of Networking and Switching Technology, Beijing University of Posts and Telcommunications,100876, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (No.61902021), Beijing Natural Science Foundation Municipality (No.4212008), Open Foundation of State key Laboratory of Networking and Switching Technology (Beijing University of Posts and Telecommunications) under Grant SKLNST-2019-2-08, the Project of Civil aviation safety capacity under No. PESA2019074, and the fundamental research funds for the central universities under No. 3122018C036.
Data availability
A data availability statement is compulsory for research articles and clinical trials. Here, authors must describe how readers can access the data underlying the findings of the study, giving links to online repositories and providing deposition codes where applicable. For more information on how to compose a data availability statement, including template examples, please visit ![]() .
.