
Abstract
Vehicular ad hoc network is a pretty research vibrant area since last decade. It has been successfully used for intelligent transportation system and entertainment purposes for realization of smart cities. However, intermittent connectivity, high routing overhead, inflexible communication infrastructure, unscalable networks, and high packet collision are the key challenges that put hindrances on the wide applications of vehicular ad hoc network. The severity of these challenges become even more intensified when deployed in urban areas. To overcome these hurdles, integrating micro unmanned aerial vehicles with vehicular ad hoc network provides a viable solution. In this article, we proposed an unmanned aerial vehicle–assisted vehicular ad hoc network communication architecture in which unmanned aerial vehicles fly over the deployed area and provide communication services to underlying coverage area. Unmanned aerial vehicle–assisted vehicular ad hoc network avails the advantages of line-of-sight communication, load balancing, flexible, and cost effective deployment. The performance of the proposed model is evaluated against a case study of vehicle collision on highway. Results show that utilization of unmanned aerial vehicles ensures the guaranteed and timely delivery of emergency messages to nearby vehicles so that a safe action can be taken to avoid further damages.
Keywords
Introduction
Intelligent transport systems (ITSs) are considered to be one of the major building blocks of any smart city. There could be no smart city without an efficient and reliable ITS. This necessity makes the ITS a key component of a smart city concept. Recent advancements in wireless communication have paved the way for vehicular ad hoc network (VANET) to be utilized for ITS. It has also been used for user oriented services like traffic management (balancing the road traffic), 1 driver assistance (providing 3D maps) 2 and passenger entertainment (surfing Internet/HD videos, online gaming).3,4 The main objective of these applications is to make driving/traveling experience safe and interesting. 5 However, these applications have diverse set of requirements, for example, ITS applications are delay sensitive and require guaranteed delivery, whereas entertainment services demand for high bandwidth to achieve better throughput. In spite of significant advancements in academia and industry, the existing VANET architecture suffers from multiple challenges such as intermittent connectivity, high routing overhead, inflexible communication infrastructure, and high packet collision.6,7 These challenges must be resolved for successful implementation of VANET for real-time delay critical and bandwidth hungry applications.
The most important issue of the VANET is its inefficacy to provide guaranteed delivery.8,9 The mobile nature of vehicles leads to unreliable connections among vehicle-to-vehicle (V2V) or vehicle-to-infrastructure (V2I). As the vehicles move, the relative distance between nodes varies, which vary the propagation loss and hence, fluctuate the receive side signal indicator (RSSIs) value at receiving node. Moreover, the buildings, trees, poles, and other vehicles also interrupt the radio waves and further worsen the effects of path loss. If the nodes are moving in opposite directions, RSSI variation occurs even more frequently which results in unreliable connection. Whereas, safety applications of ITS require a highly reliable connection over which emergency messages are delivered. Failure of receiving emergency messages may leads to fatal accidents. 10 In addition, data-oriented services also demand for reliable connection in order to achieve better throughput. 11
Second, the mobility of vehicles raises two critical issues as well, that is, inadequate routing and frequent handover.12,13 In V2V architecture, vehicular nodes communicate in multi-hop manner. For the sake of sending data packets at multiple hops, nodes maintain routes either proactively or reactively. High mobility of nodes changes the position of source, destination, and/or intermediate nodes and in turn, interrupt the data path. This interruption initiates the route maintenance process, which is purely a routing overhead. Increasing the nodes mobility ultimately increases the routing overhead and hence lower the network performance. V2I communication mechanism also suffers from nodes mobility. It causes the frequent handover among road-side units (RSUs) or base station (BS) and leads to service interruption and introduce additional delays.
Third, VANET provides fixed communication infrastructure over which ITS and user-oriented applications provide their services. It lacks the flexibility to incorporate the dynamic access demands, for example, extending coverage area or establishing on-demand network infrastructure. 14 Although, the multi-hop V2V can extend the coverage area and can be deployed dynamically without any infrastructure, this extension is very limited. Extending communication at multiple hops in highly dynamic and dense environment will further lower the network performance.15,16 Hidden node and exposed node problems can also be occurred in VANET, which causes to incur packet collisions and introduces additional delays. 17
Furthermore, scalability is also a major issue in VANET. 18 Increasing the number of nodes further downgrade the network performance. The network becomes congested and adds noteworthy amount of delay, causes the excessive packet collisions, and enlarges the routing table. Energy consumption during wireless communication is also a key component to evaluate the performance of VANET. Although, it is not given much importance in literature for VANET communication where energy comes from vehicle power, it cannot be neglected at all.19,20 It can be considered essential parameter for battery powered electrical vehicles. 21 It also plays its role from the perspective of green computing. 22
In a nutshell, the intermittent connectivity, high routing overhead, frequent handovers, inflexibility of communication infrastructure, and unscalable networks deprive the delay critical and bandwidth hungry applications to achieve their objectives. The existing VANET solutions become incapable for providing suitable platform to these applications in order to deliver their services. For instance, ITS applications necessitate the guaranteed delivery of emergency messages with a bounded time delay. If the message is not delivered within the given time frame, an accident (even a chain collision) may occur. In the same way, high throughput is required to support entertainment applications for better user experience. Whereas VANET wastes the significant amount of bandwidth in routing overheads. 23 Therefore, it is highly desirable for VANET to have communication architecture such that it must satisfy the delay and bandwidth-oriented needs of applications. Meanwhile, it must also compensate the routing overhead, intermittent connectivity, and energy consumption issues as well.
To deal with above-mentioned issues, unmanned aerial vehicles (UAVs) can be utilized to co-operate with VANETs. Compared to traditional VANET communications, UAVs-enabled communications are significantly less affected by channel impairments such as shadowing and fading, and in general possess more reliable air-to-ground channels due to higher probability of having line-of-sight links with ground users. 24 In addition, in the areas where the infrastructures are difficult or too costly to install and maintain to provide ideal network coverage, UAVs can serve as a viable option, as they can collect information from an area of interest and transmit information to ground VANETs. They can also act as relays to ground networks when direct multi-hop communications are not available.
In this article, we proposed UAV-assisted VANET architecture. Micro-Drones (also known as UAV) have already been used to provide communication coverage over the hilly/disastrous areas where the communication infrastructure is not available or has been destroyed. 25 They have also been used for border surveillance, monitoring of sensitive areas, and environment sensing. In the proposed architecture, multiple UAVs fly and orbit over the area where they are required to provide communication facilities. They act as mobile RSUs and can communicate with vehicles, static RSUs, and nearby flying UAVs. UAV-assisted VANET avails certain advantages over traditional VANET. It provides the platform for line-of-sight communication between UAV and vehicles, which leads to attaining the reliable connection, and hence, the guaranteed delivery can be achieved. It also minimizes the routing overhead caused by mobility in V2V communication since nodes communicate directly with mobile RSUs. Moreover, it provides flexibility in communication infrastructure where on-demand coverage area can be extended to fill blank holes or network load can be balanced in dense areas in a cost effective manner.
Performance of the proposed UAV-assisted VANET model is evaluated against a case study for ITS. In this study, we consider an emergency situation happens with a vehicle due to sudden appearance of some hurdle or collision with other vehicle. The source vehicle broadcasts an emergency message to inform the other vehicles in near vicinity. The objective here is to achieve the guaranteed delivery (i.e. all nearby vehicle must receive the message) with minimum delay in order to act safely.
Contributions in this article
Our contributions in this article are as follows:
We propose UAV-assisted VANET communication architecture for ITS in smart cities.
Highlights challenges to traditional VANET and mention the potential benefits of proposed model.
Several experiments are conducted to study the effects of UAVs deployment in highway scenario for safety application of ITS.
Related work
A lot of work has been carried out to resolve the issue of high mobility and intermittent connectivity of vehicles in VANET. Most of them proposed the opportunistic VANET architecture which is composed of a set of vehicles that are assisted by an infrastructure. In the absence of neighboring vehicles, these infrastructures play the role of a relay for packets. Table 1 summarized the existing work on VANET leveraging the UAVs capabilities. Mehar et al. 37 used the static RSUs as relays to decrease the packet dropping ratio and enhance the end-to-end delay. The study focused on finding the most appropriate locations for erecting RSUs based on vehicle density and degree of connectivity. RSUs are placed to fill the communication gap in a sparse network. The author used the genetic algorithm along with Dijkstra’s algorithms for finding the best RSUs location to reduce communication delays and, at the same time, decrease the infrastructure deployment cost.
Existing work on integration of UAVs with VANET.
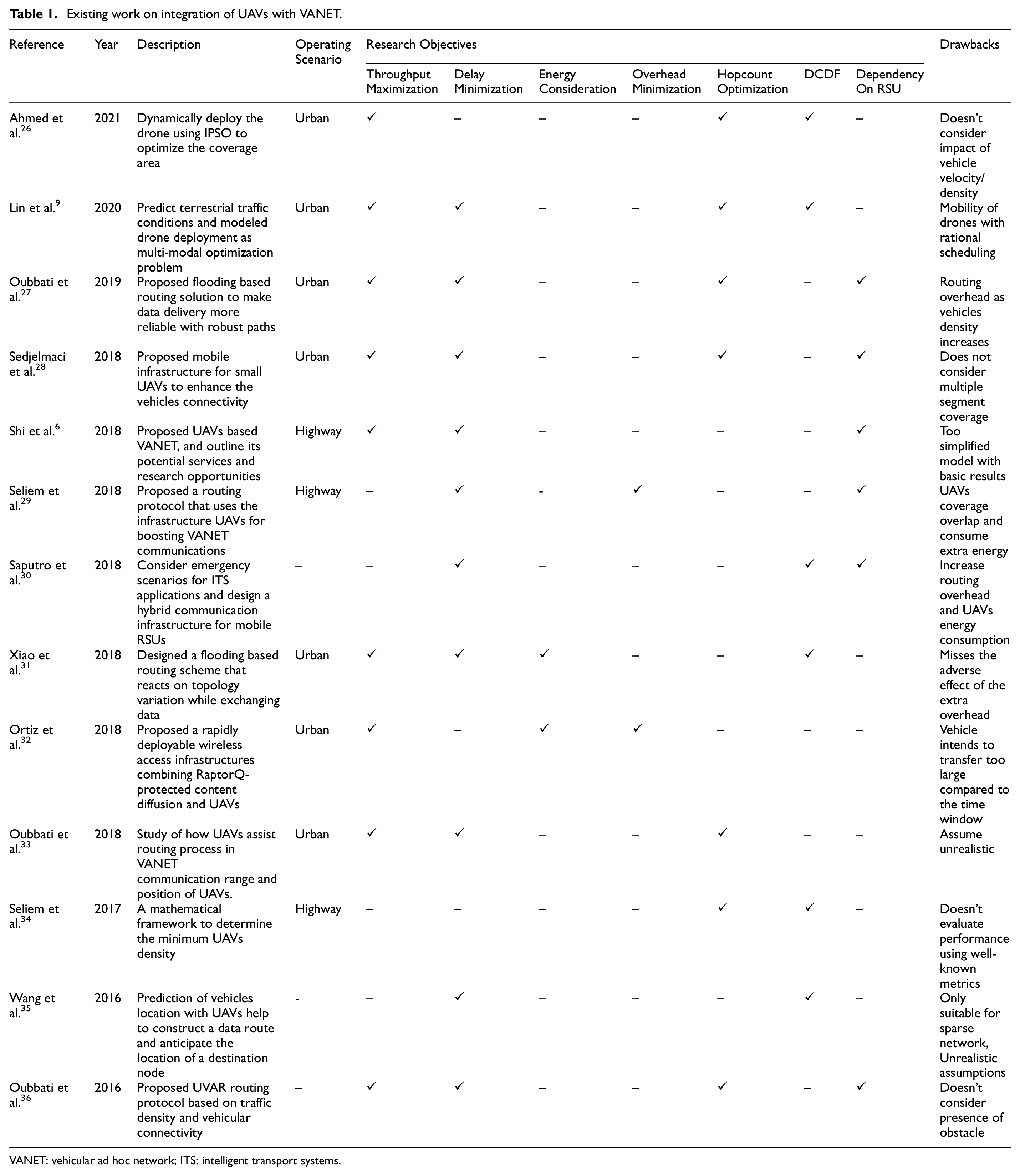
VANET: vehicular ad hoc network; ITS: intelligent transport systems.
To provide ubiquitous connections for vehicles, Shi et al. 6 introduced the Drone Assisted Vehicular Networks (DAVN) and integrated the communication technologies of vehicles and UAVs. In this study, the author outlined a comprehensive architecture UAV-based VANET communication, highlights its potential services and laid down the challenges and research opportunities. A case study is provided to show the efficiency of UAV-based VANET architecture. Oubbati et al. 27 conceived a routing solution based on a flooding technique in order to make guaranteed and reliable data delivery. It considers the UAVs cooperation in ad hoc fashion with road vehicles. A prediction technique is used in this study to predict the link expiration time. The combined effect of collaboration and prediction offers reliable routing paths To exploit flexibility and superiority of the drones, Ahmed et al. 26 proposed a dynamic Internet of drones (IoD) collaborative communication approach for urban VANETs. IoD deploy the drones considering the current locations of ground vehicles. The core objective of this study is to dynamically deploy the drone optimize the coverage area. The study devised a nature inspired improved version of Particle Swarm Optimization (IPSO) for IoD-assisted VANET (IoDAV). Although the proposed model achieve optimal value of coverage area, it did not show the impact of vehicle density and velocity on the communication impairments and ensures alternative routes in the case of link disruption. Another study in Lin et al., 9 the author predicted the terrestrial traffic condition and modeled the drone deployment as a multi-modal optimization problem. To this end, a succinct swarm-based optimization algorithm, namely Multi-modal Nomad Algorithm (MNA) is presented. This algorithm is inspired by the migratory behavior of the nomadic tribes on Mongolia grassland. The proposed model outperforms its counterparts in terms of hop number, packet delivery ratio, and throughput. Saputro et al. 30 conducted a study in which the author considers an emergency scenario for ITS and design UAV-based hybrid communication infrastructure for mobile RSUs. In the co-existence of Dedicated Short Range Communication (DSRC), LTE, and wireless mesh, the architecture deals with interoperability and issues. This study aimed to obtain the drone cumulative distributive function (DCDF) required number of active drones based on the current vehicular density. Specifically, they proposed a tunneling protocol to merge IEEE 802.11s with the LTE network. In addition, they integrated an authentication protocol on top of the OAuth 2.0 standard and ensured that only the registered users can connect and control the RSUs.
Seliem et al. 34 proposed a mathematical model to find the separation distance among co-located UAVs and determined the UAVs density that stochastically limits the worst case for the vehicle-to-drone packet delivery delay. In addition, it proposed a drones-active service (DAS) that is added to the location service in a VANET to obtain the DCDF required number of active drones based on the current vehicular density while satisfying a probabilistic requirement for vehicle-to-drone packet delivery delay. The main objective is to boost the VANET communications using infrastructure drones to achieve the minimum vehicle-to-drone packet delivery delay. Seliem et al. 29 used the drone infrastructure for supporting the VANET communications to attain a minimum vehicle-to-drone packet latency. This article also proposed a closed-form expression for the probability distribution of the vehicle-to-drone packet latency on the highway. Based on the closed-form expression, the minimum drone density can be calculated that stochastically limits the worst case of the vehicle-to-drone packet latency. Moreover, the analysis of this article focused on two-way highway VANET communication with low vehicular density.
A study in Wang et al. 35 devises an infrastructure-less vehicle-drone hybrid VANET (VDNet), which make use of quad-rotor drones, to improve the V2V data delivery ratio and end-to-end delay. VDNet considered the vehicle geographic information and predicted the vehicle location to track the other vehicles. Prediction of the distributed vehicles location helps to construct a data route and anticipate the location of a destination node. The UAVs play multi-purpose role, gather location information of vehicles, send message directly to destination vehicle, and/or relay data for multi-hop route. A study in Xiao et al. 31 used UAVs to relay the message of vehicles and improve the communication performance of VANETs against smart jammers that observe the ongoing On Board Unit (OBU) and UAV communication status. The interactions between a UAV and a smart jammer were formulated as an anti-jamming UAV relay game, in which the UAV decides whether or not to relay the message to another RSU, and the jammer observes the UAV and the VANET strategy and chooses the jamming power accordingly. A hot booting policy hill climbing (PHC)-based UAV relay strategy is proposed to help the VANET resist jamming in the dynamic game without being aware of the VANET model and the jamming model. In order to prevent intermittent connectivity in urban areas, 38 designed the flooding based routing scheme that automatically reacts at each topology variation while exchanging data in ad hoc manner with UAVs flying overhead. The proposed model performs better in terms of delivery ratio and data latency.
Subject to the mobility pattern of the vehicles and various abstractions caused by buildings and poles, it is hard to find the shortest route especially in urban areas. In order to surmount these difficulties, previous study 36 investigated how the UAVs can support ground vehicles in relaying the message. The author proposed UAV-Assisted VANET Routing Protocol (UVAR) for VANET. This protocol made use of vehicular connectivity and traffic density in the streets. UAVs collect the vehicular connectivity information using Hello message and exchange them with ground vehicles. This information allows the UAV to place themselves at a convenient place so as to act as a relaying node. However, UVAR does not fully exploit UAVs in the sky for data forwarding because it uses UAVs only when the network is poorly dense. Another study in Ortiz et al. 32 attempted to resolve this issue using rapidly deployable wireless access infrastructures combining UAVs and RaptorQ-protected content diffusion. Experiment results showed that UAVs can serve as rapidly, effective, and cheap deployable mobile RSUs; and RaptorQ-based content dissemination mechanisms are efficient in multicast/broadcast communication. A study in Oubbati et al. 33 also referred to the utilization of UAVs for finding the shortest end-to-end connected path with minimal overhead. This study revealed that how UAVs operating in ad hoc mode assists the VANET to improve the routing process and reliability of the data delivery by filling the communication gap whenever it is possible. They proposed an extension of Oubbati et al. 36 by supporting two different ways of routing data: (1) transmitting data packets in the sky using a reactive routing based on UVAR-S and (2) delivering data packets exclusively on the ground using UVAR-G. The main disadvantage of this protocols is that it assumes same communication range for ground vehicle and UAVs. UAVs must have larger communication range as compared to vehicles since they have larger inter-UAVs distance. Moreover, it assumes the position of UAVs where probability of line-lo-sight is too low.
Sedjelmaci et al. 28 highlights the issues of long delays, frequent disconnections, and messages loss in VANET and provide the solution in terms of UAVs integrated VANET. They assumed the UAV as a relying node between disconnected segments in the road. In such scenarios, effective communication is either between vehicles (V2V) or between vehicles and UAVs (V2U), which would form subsequently a UAV-assisted vehicular network. This article presented a new framework for using small UAVs as mobile infrastructure nodes in order to improve inter-vehicles connectivity. The model predicts the disconnected segments using a theoretical game process. It also incorporated a mitigation technique based on game theory to reduce the power draining effects that a broadcast storm would have on the energy consumption of the network.
UAV-assisted VANET
The intermittent connectivity, high routing overhead, frequent handovers, inflexibility of communication infrastructure, unscalable networks, high packet collision, and energy optimization are the key issues of existing VANET architecture. The main objective of the UAV assisted VANET is to resolve these issues and provide better user experience in a cost-effective manner. This section provides the detailed architecture of the proposed model including its components, deployment, and communication mechanism. Figure 1 visualizes the ITS component of smart city with UAV-assisted VANET deployment in urban area where UAVs fly over specified area.

UAV-assisted VANET communication architecture where UAVs flying in the urban and provide communication facilities to underneath vehicles. They also have inter-UAV communication links.
UAV-assisted VANET components
Vehicular nodes
Vehicles are the ordinary vehicular nodes as these are already being used in VANET. Vehicles are equipped with On Board Unit (OBU) that enables them to act as network nodes and communicate with each other or connect with static/mobile RSUs by leveraging V2V or V2I technologies, respectively. In addition, OBU also has GPS sensor: to provide location information, memory: to store and retrieve information and processing facilities as well and support IEEE 802.11p standard for communication. It is also connected with wireless sensor deployed inside the vehicle in order to monitor the physical condition of vehicle. Whenever, an unusual event happens with the vehicle (e.g. it collides with some obstacle or other vehicle), these sensors immediately report to the OBU which in turns generate an emergency message. This message is used to inform (1) the nearby located vehicles in order to take safe actions and avoid further collisions (2) and the RSU which in turn report to control center for calling rescue services if needed. OBU also includes the human interface for supporting human involvement in safety and entertainment applications of VANET.
Wireless channel
There are number of wireless technologies are available to provide V2V and V21 communication. Dedicated short range communication (DSRC) is the most prominent technologies among them. As the name suggests, DSRC is used for medium to short range communication (up to 1000 m). Frequency Communications Commission (FCC) has allocated the bandwidth of 75 MHz at frequency of 5.9 GHz for DSRC. Moreover, 75 MHz bandwidth is divided into 7 channels of 10 MHz each, out of them one channel is control channel and exclusively used for safety purposes, whereas other six are service channels.
Static road-side units RSUs
These are the stationary nodes installed alongside the road preferably at dense areas. These RSUs have two communication interfaces, that is, the wireless interfaces that connect them with the vehicular nodes, and other is wired connection that enables them to connect with Internet (possibly through fiber optical cable) and provide the access point facility to vehicles. It is not merely act as a rely node for VANET, and it may perform the controlled decision for the sake of improving network performance and providing secure connection. An edge server may co-locate with RSU to realize the concept of mobile edge computing (MEC), where computational expensive tasks are performed at edge server. The aim of MEC is to provide low latency and real-time access to network information via application and services. Integrating the MEC in vehicular environments would allow the evolution of the next generation ITS in smart cities. Moreover, RSU provides the centralized architecture for V2I communication. While acting as a relay nodes, it may extend the communication coverage over multiple hops.
Micro UAVs
It is an essential component of the UAV-assisted VANET. The unprecedented recent advances in UAVs technology make it possible to widely deploy UAVs, such as small aircraft, balloons, and airships for wireless communication purposes. They fly at a reasonable height over the area where they are supposed to provide communication services. Along with the supporting sensors, for example, barometer, altimeter, and GPS to locate and adjust the position of UAVs, they are also equipped with OBU that enable them to communicate with other nodes of UAV assisted VANET architecture. In particular, if properly deployed and operated, UAVs can provide cost effective and reliable wireless communication solutions for a variety of real-world scenarios. Compared to conventional, static RSUs, the advantage of using UAVs as flying base stations is their ability to adjust their altitude, avoid obstacles, and enhance the likelihood of establishing line-of-sight (LoS) communication links to ground users.
They may connect with vehicular nodes, RSUs, other UAVs, and ultimately to the control station. The position and communication of these UAVs are being controlled from a control station which deploys them at suitable location where it seems necessary. Control station also provides the backup facilities for UAVs like replacement of infected or low battery UAVs, charging of UAVs. UAVs can also work in a swarm while adjusting their position intelligently and communicate in a collaborative manner.
However, integrating MEC server with UAV RSUs does not seem a feasible solution. MEC server is an optional feature and can only be integrated with static RSUs. It is a dedicated server which possesses high computation power, occupies some physical space, and requires energy resources to operate. The key difference between UAV RSU and static is that UAV RSU aims to improve edge connectivity of vehicular nodes whereas static RSU can provide communication relying as well as MEC services. Nevertheless, the MEC services can be provided with UAV-assisted VANET as well. Since, UAVs may have backend connectivity with other UAVs and static RSUs, it may use MEC services provided by static RSUs. As it is already described that the main objective of this research is to explore the impact of integrating UAVs in VANET. Exploring MEC in VANET is beyond the scope of this study.
Communication in UAV-assisted VANET
UAV-assisted VANET architecture supports the V2V, V2I, and infrastructure to infrastructure (I2I) communication. V2V communication is used when a vehicle wants to directly communicate with a single or group of vehicles. It is particularly used when there is no infrastructure is available to assist. It can also be used in an event where involvement of the RSU may consequently results in excessive delays. V2V communication can be extended to multi-hops; however, extending it over too many hops overwhelm with the routing overhead and downgrade the network performance. I2I communication refers to inter-RSU communication. I2I uses the high-speed link for exchange (huge amount of) data. Most of the time, static RSUs use optical fiber connection for their communication. They may have wireless connection with other RSUs. They have Internet connectivity as well and allows the passenger/driver to surf Internet. Whereas, UAVs can only connect with other RSUs (static or dynamic) via wireless interface. However, in order to achieve high-speed wide band communication, UAVs use the dedicated licensed band for backbone connection. Whenever a UAV is directed to perform communication between vehicle and control station or any Internet server, UAV route information to the Internet via static RSUs.
The crux of the proposed architecture is V2I communication. It defines the specialty of UAV-assisted VANET. In traditional VANET, V21 encompasses only the vehicle to static RSUs communication, whereas UAV-assisted VANET considers the UAVs as mobile RSUs and named the UAVs to vehicle communication as V2I. Advantages of using UAVs as a mobile RSU are described in the following section. The main objective of using mobile RSUs is to provide flexible coverage, fill the communication holes (areas where no communication architecture is available), use line-of-sight communication (suffers only from free space path loss), and balance the network traffic in congested areas. This eventually results in reduced packet delay, higher throughput, low packet collisions, and hence low packet drop ratio. This will also lead toward minimizing energy consumption in communication.
V2I communication starts with a registration process. The vehicular node registers itself with the infrastructure and then use its communication facilities. Selecting an infrastructure for registration from two or more mobile or static RSUs is a function of quality of communication link between RSU and vehicle and network load on the RSU, that is


A vehicle node registers itself with UAVs only when it has better signal quality with it, meanwhile UAVs have relativity low communication load. The communication load is determined by number packet waiting in the input buffer of an RSU. An RSU with larger number of packets in his buffer will cause to suffer addition delays and might drop packets when buffer is full. Although the changing distance between UAVs and ground vehicle tends to change RSSI value, the vehicle does not change its registration. It remains registered with unless
Advantages of UAV-assisted VANET
Regardless of the potential benefits of static RSUs, that is, high processing power, co-location with edge server, ability to handle numerous connections, and elastic energy consumption, it is prone to many issues as well (described in section “Introduction”). In contrast to static RSUs, UAV communication is an emerging technology and exhibit valuable features which can enhance the VANET performance and applications. UAV communication avails the following advantages over tradition static RSU-based communication.
Line-of-sight
UAVs operate at a reasonable height over the horizon. Positioning the UAVs at optimal altitude increases the probability of line-of-sight since path loss due to buildings, poles, trees, and vehicles become negligible. In order to model the air-to-ground path loss, authors in Al-Hourani et al. 39 formulate the closed expression form for probability of line-of-sight as follows

where

Flexible infrastructure
Dynamic deployment of UAVs enables the VANET to have flexible infrastructure. UAVs can be deployed dynamically in order to satisfy application requirements and provide communication services. For instance, UAVs can be dispatched to fill communication holes. They can also be used to extend the coverage area of static ground infrastructure. Vehicles can connect with UAVs and access infrastructure through UAVs, which are connected to other static/mobile RSUs.
Load balancing in congested areas
In the urban areas, vehicle density is usually very high as compared to rural or highway areas. The vehicle density even reaches to the peak during rush hours. Moreover, occurrence of the road accident further brings spikes in density and gather multiple vehicle under the coverage area of one or few RSUs. During these congested density hours, huge number of vehicles will be connected with RSUs and overwhelm the network. Because of this, network becomes congested and all users in that vicinity suffer significant amount of communication delay. In order to cope with high density problem during rush hours, UAVs can be deployed to balance the network traffic. These are positioned (for instance, over a road cross section where vehicle density is usually very high) and divert the network traffic form static RSU to UAVs. In other words, increasing the number of static/mobile RSUs in a specific region will reduce number of connection per RSU, which ultimately reduces network load on existing RSUs.
Communication infrastructure in disastrous areas
Elastic deployment ability of UAVs allows them to be used for harsh conditions as well. In the natural disastrous areas where communication infrastructure has been destroyed (e.g. due to earthquake or flood), UAVs can be used to provide temporal communication services. The UAV-based communication will also be helpful to great extent in order to guide the rescue teams. It is also a viable option to provide communication or monitoring of high terrain areas.
Cost effective
For the sake of satisfying the application requirements, for example, fill the communication holes, extend coverage of ground infrastructure, load balancing in congested areas or provide communication infrastructure disastrous areas; use of UAVs to provide services is much effective in terms of time and money as compared to deploying a static RSU. UAVs deployment can be executed with only few hundred dollars, whereas static RSUs required thousands of dollars for their successful implementation.
Case study
To validate the performance of proposed VANET architecture, we built a case study of a highway scenario for safety application of ITS. As shown in Figure 2, vehicles are moving in multi-lane road while keeping their lane. Vehicles moving in the opposite direction are not concerned to each other. An incident occurs on one side of the road affect only the vehicles moving in same direction and does not interfere the other side. Moreover, UAVs are flying over the road segment at a distance from each such that no communication hole remains left. Here, the road segment refers to section of road under study and where the UAVs have been deployed. For this case study, we assumes that UAVs perform the relying function and relay the messages to their nearby UAVs and vehicles underlying their coverage area. In order to simulate the UAV-assisted VANET scenario, we generate an emergency message caused by collision of two vehicles. The objective of this emergency message is to inform the other vehicles moving in same direction such that they can take safe action to avoid further chain collision. Moreover, this message is also delivered to control station in order to provide rescue services.

An UAV-assisted VANET case scenario where a collision occurs between two vehicles moving on the highway. Colliding vehicles generate emergency message and send to nearby vehicles and UAVs situated above head.
To facilitate safety applications in VANETs, emergency message is disseminated reflecting accident/hazardous conditions, and the number of car accidents and their associated damage can be significantly reduced. The prime reason for deploying VANET for safety application is the substantially long reaction time (i.e. 0.75–1.5 s) of any human driver to apply the brake following an emergency scenario. The potential damage inflicted by such a long reaction time of an individual driver is, indeed, remarkably high in case of a close formation of vehicles, which travel at high speeds. Instead of having drivers to traditionally react to the brake lights of vehicles immediately ahead, pre-informed emergency message enables the vehicles to promptly react in emergency situations. This feature prevents chain collisions and reduce the associated damage. The flow of the message is shown in algorithm 1. Whenever an emergency situation happens with a vehicle, it broadcast the message. The emergency message includes the vehicles ID, direction heading, and location information. Vehicle ID uniquely identifies any vehicle in the road. For instance, it may be the vehicle registration number. The direction flag points the heading of the vehicle. All vehicles moving in the same direction have same value for direction flag. If the direction flag is opposite to that of vehicle, it assumes that the accident occurs on opposite side of the road and simply ignore the message. In contrary to this, having same value of direction flag triggers the vehicle to take safe action. Location parameter tells the information about position of the vehicle/accident. The nearby vehicles located in the communication range of the source vehicle receive message, update information and act accordingly. It is important to be noted that position of accident is a key information for vehicles that are approaching the place of incident. It enables the vehicles to estimate their distance from source vehicle. Upon receiving the message, the vehicle compares it with its own position. If the vehicle has already passed the point of accident, then it will ignore the message, otherwise, it will compute the distance. Moreover, coordinates of the vehicles in the message also point the control station about accident location. In order to control broadcast flooding and delivering the message at multi-hop in the VANET, vehicular nodes are disabled to rebroadcast the message. They receive the packet and do not rebroadcast. It is only the flying node who rebroadcast the packet to extend message delivery area and hence, packet flooding can be avoided. Meanwhile, the UAVs situated above the source vehicle also receive that message and relay it downward to other vehicles and sideways to the other UAVs. The subsequent UAVs repeat the process of relying, unless a certain receiving threshold is reached. The receiving threshold value is related to hop count and used to determine the extent of communication coverage. Higher the threshold, farther the message will be propagated. Moreover, this threshold can be used to compute the estimated distance from the source vehicle. The vehicles which are either situated ahead of the source vehicle are running in opposite direction on other side of road will discard the message.
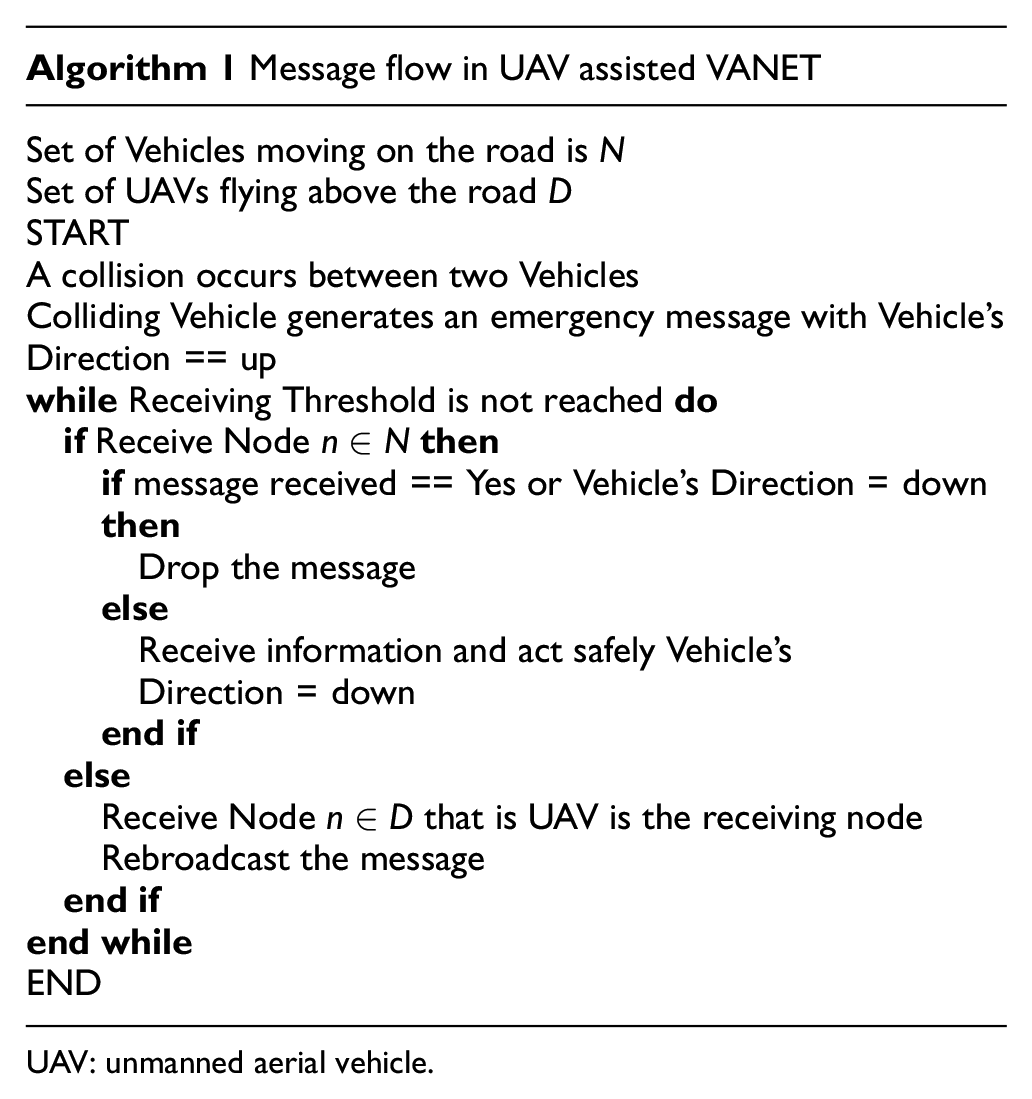
UAV: unmanned aerial vehicle.
Experimental setup
Table 2 enlists the detail of simulation parameter. We use network simulator 2 (version 2.31) to simulate the UAV-assisted VANET network. We use VANETs and UAVs in our topology. BonnMotion generates the mobility of vehicles and UAVs and pass it to the NS-2, which in turn generate the packet and simulate network based on position of vehicles and UAVs. UAVs fly at the height of 100 m and relatively remain stationary (perform orbiting around a reference point). Every vehicle is directly communicating with its neighbors and the UAVs. The UAV acts as the relay agents for multi-hop communication. The proposed UAV-assisted VANET architecture follows cluster-like topology where UAVs acts as a cluster head. In order to explore and exploit the findings of proposed architecture, numerous simulations are performed by varying the road length, density of vehicle on a road segment, and velocity of vehicles. We perform simulation for 10,000 emergency messages and compute their average results where emergency transmitting node is selected randomly.
Simulation parameters.

We used UAVs in place of RSUs in our simulation and implement AODV routing algorithm. We take into account only UAVs for performance evaluation. We considered a highway scenario as a case study and assumed that there is no static RSUs infrastructure available. On highway, the probability of co-locating UAVs with static RSUs is very low. In order to fill the communication hole (in the highway), UAVs are deployed that facilitate the VANET communication and perform the roles as RSUs.
The proposed model is compared with drone-assisted vehicular network (DAVN) and state-of-the-art delay-based multi-hop VANET communication. DAVN prefers to use V2C communication and exploits the drone-based communication when it destination vehicles are not accessible. In delay-based multi-hop VANET communication relaying function is performed by the vehicle lying at the edge of transmission range of source/relaying vehicle. As discussed in Panichpapiboon and Pattara-Atikom, 40 each vehicle computes its own waiting time for deciding about relying node. A vehicle with shortest waiting time has the highest probability to act as a relay. Waiting duration is computed using the following function

where
Performance evaluation
Now, we discuss the performance analysis of the proposed UAV-assisted VANET architecture using the described case study. The performance is evaluated in terms of delivery ratio, packet delay, and network average energy consumption.
Packet latency
Packet latency (also known as delay) is considered as a critical parameter for real-time and safety-related application where a specific action must be performed within a bounded time delay. Failure to respond with given bounded time may lead to fatal accident. It also affects the throughput of network and hampers the performance of data-oriented applications. Delay is the time elapsed since the transmission of the packet to its reception. It includes processing, waiting, and propagation delay

For a given distance

where

Average delay for UAV-assisted VANET with various degrees of vehicle density, their velocity and length of the road (a) delay with road length 1000 m, (b) delay with road length 2000 m, (c) delay with road length 3000 m, and (d) delay with road length 4000 m.
Energy consumption
In the literature of VANET, energy consumption during communication is not given significant importance. This is because OBU of the vehicle is energized from engine power. However, it started to get the researcher attention now a days. Along with optimizing the VANET communication, recent studies also show their concerns for green computing. Moreover, rapid development and commercial use of electrical vehicles have come into existence. They demand for optimal energy consumption to prolong their drive duration. In addition to this, UAVs are the key component of the proposed architecture and get their energy from dry battery. The limited energy can sustain the operation of only few minutes. Therefore, the combined effects of green computing, electrical vehicles, and battery-powered UAVs state that it is quite important to consider the energy consumption while designing communication schemes for UAV-assisted VANET. Energy consumption during communication is a function of packet transmission and reception and can be defined as

where

Figure 4 shows per node average energy consumption in UAV-assisted VANET. For each length of road, energy value remains constant while varying the velocity of nodes. This is because of fixed number of hops from originating to the farthest node, and 100% DVR (mean no packet collisions). However, energy consumption decreases with increasing the number of vehicles. The main cause of this decline is that we have fix number of message transmission (i.e. 10,000 packets) for various density of vehicles and for every message, a vehicle is selected randomly .
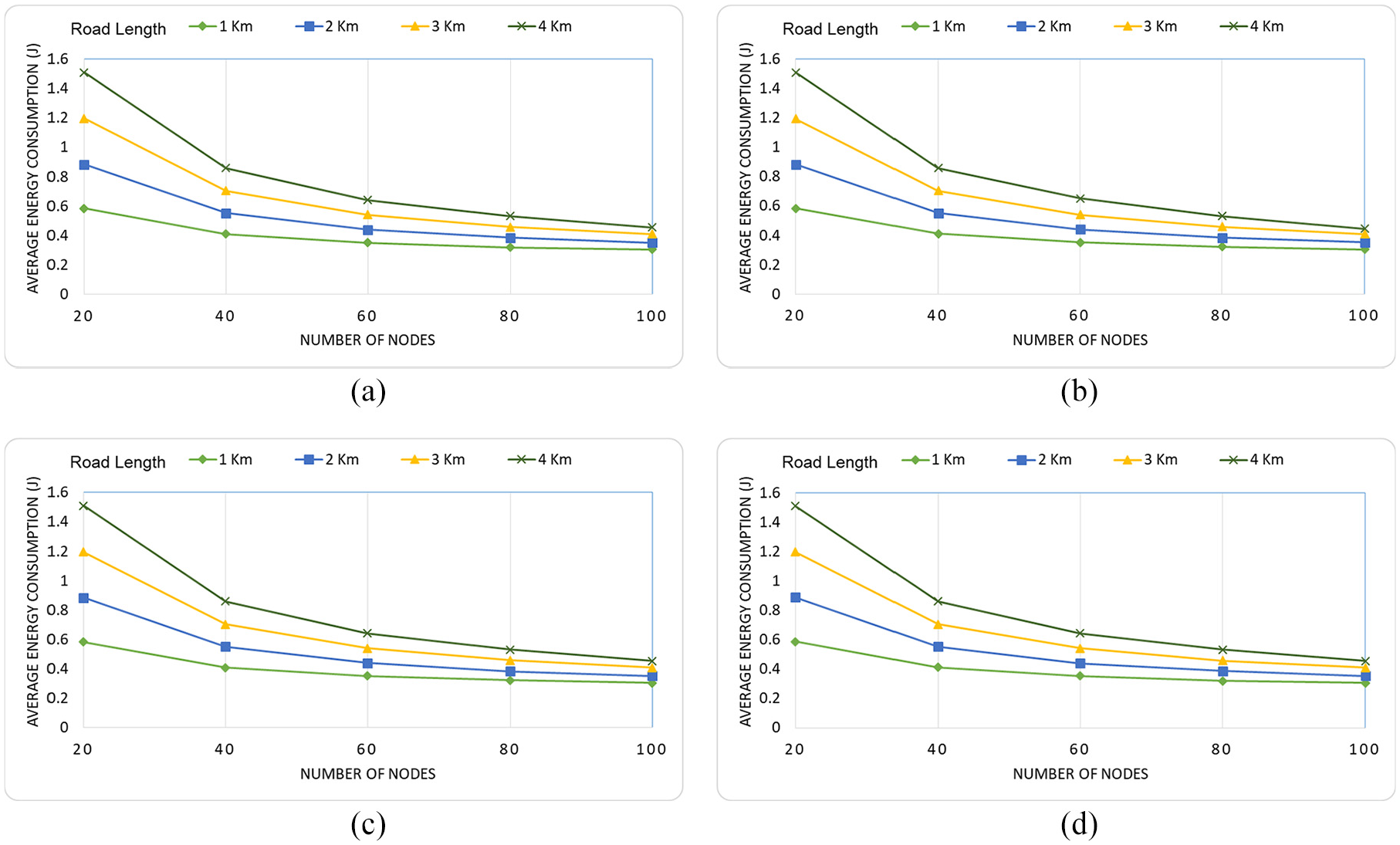
Average energy for UAV-assisted VANET with various degrees of vehicle density, their velocity and length of the road (a) energy with vehicles velocity 80 km/h, (b) energy with vehicles velocity 100 km/h, (c) energy with vehicles velocity 120 km/h, and (d) energy with vehicles velocity 140 km/h.
Therefore, increasing the vehicle density consequently reduces the per vehicle packet transmission and reduces the energy consumption,
Packet delivery ratio
Packet delivery ratio (DVR) is the ratio between number of packet received to the number of packet sent. DVR is used to depict the guaranteed delivery of messages. In this study, we use slight variation of basic DVR definition. As shown in Figure 2, collision between vehicle causes to generate emergency messages that is required to be delivered to all nodes approaching the accident in that road segment. For the sake of simplicity, we assumes that one collision caused to generated only one emergency message. Therefore, DVR of single message for a particular road segment becomes

Higher value of DVR shows that more number of vehicles has received the packet and can take safe actions, and hence, further collision can be avoided. Figure 5 shows the DVR using UAV-assisted VANET for four road segments with varying the velocity and density of vehicles. It is clear from the figure that proposed model achieved the 100% DVR (it mean sure guaranteed delivery). All the messages sent by colliding vehicles are received on all vehicles on that particular road segment irrespective of vehicles density and velocity. The main reason of this guaranteed delivery is the clear line-of-sight between vehicle and UAVs, which leads to involvement of only free space path loss (described in equations (2) and (3)). Packet dropped due to propagation losses are negligible. However, this case study considered the highway environment, where probability of line-of-sight is quite high. Using UAVs in urban areas may suffer from roadside obstacles and lower the probability of line-of-sight, which eventually reduces the DVR. In addition to line-of-sight communication, there is no packet collision that occurs because of simultaneous transmission from multiple nodes in simulated scenario. Vehicular nodes receives the packet and does not rebroadcast. It is only the flying node who rebroadcast the packet and therefore, packet flooding can be avoided. Providing communication through UAVs (no communication holes), line-of-sight communication and minimal probability of packet collision are the factor that leads to 100% DVR.

Average DVR average delay for UAV-assisted VANET with various degrees of vehicle density, their velocity and length of the road: (a) DVR with road length 1000 m, (b) DVR with road length 2000 m, (c) DVR with road length 3000 m, and (d) DVR with road length 4000 m.
Performance comparison with DAVN and traditional VANET
In the above discussion, performance of proposed model is evaluated against DVR, delay, and energy while varying the vehicles density, their velocity and length of the road. In this sub-section, a comparison is made between UAV-assisted VANET with traditional VANET and DAVNin order to show the performance improvements. Figure 6 shows the DVR comparison of proposed model with the other two models. Figure clearly highlights the lead of UAV-assisted VANET over state-of-the-art VANET and DAVN. In contrast to VANET and DAVN, DVR of proposed model touches the peak regardless of vehicle density and length of the road. Whereas VANET DVR varies based on the vehicle density per road segment. In a single road segment, DVR increases with the increase in density. Road segment of 1 km have higher density of vehicles, and therefore, the probability of remaining in contact with the surrounding vehicles and receiving the packet becomes higher. Packet drop for this road segment is mainly due to packet collision that occurs at MAC layer.

DVR comparison of proposed model with VANET and DAVN for varying vehicle’s density and road length.
In the same way, increasing the length of road causes to drop DVR. The key reason of this shortfall is the sparse vehicle density over long road. Vehicles become farther apart from each other and some of the vehicles get out of communication range of transmitting/relaying vehicles and failed to receive the packet.
In Figure 7, delay comparison of proposed model with VANET and DAVN is shown. It is evident from figure that UAV-assisted VANET clearly outperforms both the techniques in terms of communication latency. VANET and DAVN suffer the significant amount delay caused by large number of hop count and high back-off time due to simultaneous transmission on same channel. Energy comparison of proposed model with VANET is shown in Figure 8. UAV-assisted VANET has significant lead over traditional VANET and almost has reverse effects as that of VANET. The sparse deployment in VANET drops the DVR abruptly and causes to increase number of re-transmissions that leads to increase in the energy consumption.

Delay comparison of proposed model with VANET and DAVN for varying vehicle’s density and road length.

Energy comparison of proposed model with VANET for varying vehicle’s density and road length.
Conclusion
The concept of ITS is expected to move into reality in emerging smart cities. In this article, we proposed UAV-assisted VANET communication architecture for ITS to provide line-of-sight and flexible communication. UAVs fly over the specified area to provide communication facilities under their coverage area. They act as mobile RSUs and assist the fixed VANET architecture to fill the communication holes and balance the network traffic in congested areas. A case study of a highway scenario is considered where an emergency messages is generated by colliding vehicles. Objective of this message is to early inform the forthcoming vehicles to take safe action. Experimental results demonstrated that UAV-assisted VANET provides fixed number of hop and control message flooding which results in guaranteed delivery of message of bearable amount of delay. UAV-assisted VANET architecture also minimizes the packet collisions and hence optimizes the energy consumption that is quite important for battery-powered vehicles and UAVs. We expect that this study will pave the way for academic and industrial research and development activities toward effective integration of UAVs into future smart cities. In the future, we aim to find the optimal height for deploying an UAV such that it is high enough to have clear line of sight and low enough to minimize free space path loss.
Footnotes
Handling Editor: Dr Peio Lopez Iturri
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.