
Abstract
Physical health diseases caused by wrong sitting postures are becoming increasingly serious and widespread, especially for sedentary students and workers. Existing video-based approaches and sensor-based approaches can achieve high accuracy, while they have limitations like breaching privacy and relying on specific sensor devices. In this work, we propose Sitsen, a non-contact wireless-based sitting posture recognition system, just using radio frequency signals alone, which neither compromises the privacy nor requires using various specific sensors. We demonstrate that Sitsen can successfully recognize five habitual sitting postures with just one lightweight and low-cost radio frequency identification tag. The intuition is that different postures induce different phase variations. Due to the received phase readings are corrupted by the environmental noise and hardware imperfection, we employ series of signal processing schemes to obtain clean phase readings. Using the sliding window approach to extract effective features of the measured phase sequences and employing an appropriate machine learning algorithm, Sitsen can achieve robust and high performance. Extensive experiments are conducted in an office with 10 volunteers. The result shows that our system can recognize different sitting postures with an average accuracy of 97.02%.
Keywords
Introduction
A large number of office workers and students are faced with a sedentary phenomenon. Recently, research shows that most people in the United States spend 54.9% of their waking time in sedentary behaviours. 1 Among them, office workers spend 65% of their workdays sitting, which 2 shows that a person spends 6–8 h a day on sedentary. In fact, sedentary behaviours3,4 and bad sitting postures are closely related to modern health musculoskeletal disorders 5 such as cervical spondylosis, chronic back pain, joint and muscle pain, improper spine alignment and spine disc damage.6–10 There is a lot of prospective evidence that static behaviour may be a risk factor for cardiovascular disease, diabetes and all-cause mortality. 11 In order to provide doctors with useful information to treat these diseases and prevent them in the office better, we need to find a way to recognize and monitor sitting postures.
In most existing work, user’s sitting posture is recognized using videos or wearable sensors. Video-based recognition method12–19 uses the image recorded by the camera to detect sitting posture. Although they have higher accuracy, they have obvious drawbacks including leakage of privacy and requirement of light. Sensor-based recognition method20–25 is another approach to monitor postures of target which is confronted with the problem that not only affects the comfort of the user, but also increases usage cost.
Motivated by the requirement of a secure, device-free and ubiquitous sitting posture recognition, this article introduces Sitsen, a lightweight, high-precision system, which is the first non-contact sitting posture recognition system based on radio frequency identification (RFID), as shown in Figure 1. We only use one tag to detect five different postures (see Figure 2) and achieve high accuracy. To realize the system, the simple idea is extracting features to distinguish different sitting postures, but the obvious challenge is how to find the effective features. We find an interesting observation that different positions induce different amplitude of breathing, as shown in Figure 3. In order to overcome this challenge, we use the phase difference to measure user’s breath 26 to get sitting posture information. Our system has no concern with privacy issues, and it does not demand users to wear the equipment. Meanwhile, the deployment of our system is also more flexible, which means it will be capable of being less interfered.

An example of Sitsen.

The five habitual sitting postures. (a) Posture A means sitting straight. (b) Posture B means back bend forward. (c) Posture C means sitting backward. (d) Posture D means the waist is straight forward and the waist and thigh are at an angle of 30°. (e) Posture E means the waist is straight forward and the waist and thigh are at an angle of 45°.

Phase sequence of different postures.
The contributions of this work are as follows:
We introduce Sitsen, which is the first non-contact sitting posture recognition system based on commercial RFID.
We propose an effective and flexible deployment, which only needs to put the tag and antenna on both sides of the user.
We design the system to recognize sitting postures using a new solution. We preprocess the original phase and extract some features to build database. Then, we use principal component analysis (PCA) for data dimensionality reduction. Finally, we use back propagation (BP) net to recognize five common sitting postures.
We implement and evaluate the method through extensive experiments and the average accuracy of the method is 97.02%.
Related work
Sitsen is related to the following existing works.
Video-based
Video-based approaches require the front-end video capture camera to provide a clear and stable video signal. The quality of the video signal directly affects the effect of video recognition and is susceptible to environmental interference. This method requires cameras to record the video streams and recognize different sitting postures using the computer vision graphics processing. However, the privacy concern is a big issue, especially in a private environment.
For example, work 12 based on video data calculates the neck angle and torso angle to make the judgement whether the sitting posture is healthy or not. They calculate the ratio of unhealthy frames to the total frames to judge if the user sits healthy during that period of time. Min et al. 15 set the judgement of healthy sitting posture more detailed and avoided interference in complicated environment by deep learning. Paliyawan et al. 16 present the system for monitoring office workers, in order to prevent office workers syndrome. However, they found the materials and shape of tracked objects also affected system performance (e.g. noise may increase when tracking person with different hairstyles or material of clothes). But the video-based detection method used in these studies is easy to involve in users’ privacy issues because of the natural character of the device’s data collection.
Sensor-based
Sensor-based approaches are a detection device that can sense the information being measured and can detect the sensed information relying on specific sensor devices. The wearable sensor-based approaches can recognize sitting postures without compromising the privacy. They mainly used sensors to extract features of different sitting postures.
For example, Estrada and Vea 20 detect proper (or improper) sitting postures using gyroscope readings from some chosen human spinal points through mobile devices attached at these points. However, the user has to wear the equipment to continue the test, which is uncomfortable for long-term use. Ma et al. 21 classify the five types of postures they defined using the single accelerometer. By comparing with the previous study, the accuracy is lower because the position of the sensor has been changed and the types of sitting postures are increased.
RF-based
RFID is a simple wireless system which is used to control, detect and track objects which neither compromises the privacy nor requires using various specific sensors. It mainly identifies the marker by the unique ID number corresponding to the tag, and it does not require human intervention and work in various environments. Feng et al. 27 use three tags pasted to user’s back, collecting breathing data to judge user’s sitting posture. However, this method requires some lightweight tags to be pasted on the back of the user (similar to the wearable sensor-based method). The wrinkles on the clothes with the tags can easily affect the data collection. Meanwhile, the tags can be repeated a limited number of times. In addition, the position of the tag will change according to the breathing of the human in their experiment.
Different from the existing RF-based sitting posture recognition, Sitsen employs only one lightweight and low-cost RFID tag beside the user and extracts effective features from both the time domain and frequency domain to recognize the sitting postures. Hence, the tag’s position will not change according to the breathing of human, and users do not need to wear any equipment.
To summarize the problems in existing work, video-based approach has drawbacks in the differences of physical properties of tracked objects and its insufficient privacy. Wearable sensor-based approach needs to wear special equipment. Our system avoids these problems effectively with RF-based devices, which is contactless and portable. Besides, our devices will not be affected by light resistance and radioactive environment.
System design
The commodity passive RFID system includes RFID reader, antenna and RFID tag. As shown in Figure 1, the reader sends RF signal to the space through the antenna. The tag in the electromagnetic field receives the RF signal to generate an induced current, which activates the tag. Then, the tag feeds back its information to the antenna through backscattered signals. Besides the information, the reader measures the strength and phase of the received signal after demodulation and decoding. Here, we use phase information to recognize the sitting postures since the RFID reader needs to be able to output fine-grained phase information.
For deployment design, our system only uses one cheap and portable RFID tag and a reader antenna, which are placed beside two sides of the chair to monitor sitting postures. When the user’s sitting posture changes, due to the different Fresnel zone, 26 the received signal phase at the reader changes accordingly. Note that the phase variation for different sitting posture is unique, which can be used as a reliable primitive for sitting posture recognition (see Figure 3). The tag can sense the users’ respiration and we find that the observed respiration patterns from the measured phase sequences are distinct under different sitting postures. Therefore, Sitsen can recognize sitting postures by carefully processing the measured phase sequences without compromising the privacy nor wearing various sensors.
We design our system with three steps: data processing, feature extraction and sitting posture recognition as shown in Figure 4. Each step is vital for reaching high performance in sitting posture recognition. We obtain clean phase sequence after data processing, select feature whose contribute rate more than 95% by PCA, and BP net classifier is used in sitting posture recognition. We will introduce the details of each part in next section.

System overview.
Methodology
In this section, we introduce the main methods of our system.
Data processing
For RFID system, the RFID reader transmits RF signal through the antennas to activate the passive tag, and the tag backscatters the signal to the RFID reader. In this section, we present the design of phase processing module to remove the hardware noise and address the multipath issue in indoor environment.
As shown in Figure 5, we find that the raw phase readings have a

Remove phase shift.

Denoise and smooth.
Feature extraction
After data processing, the next step is to extract features from the phase sequences to represent different sitting postures. Intuitively, we can use the features (i.e.
Features used in Sitsen.
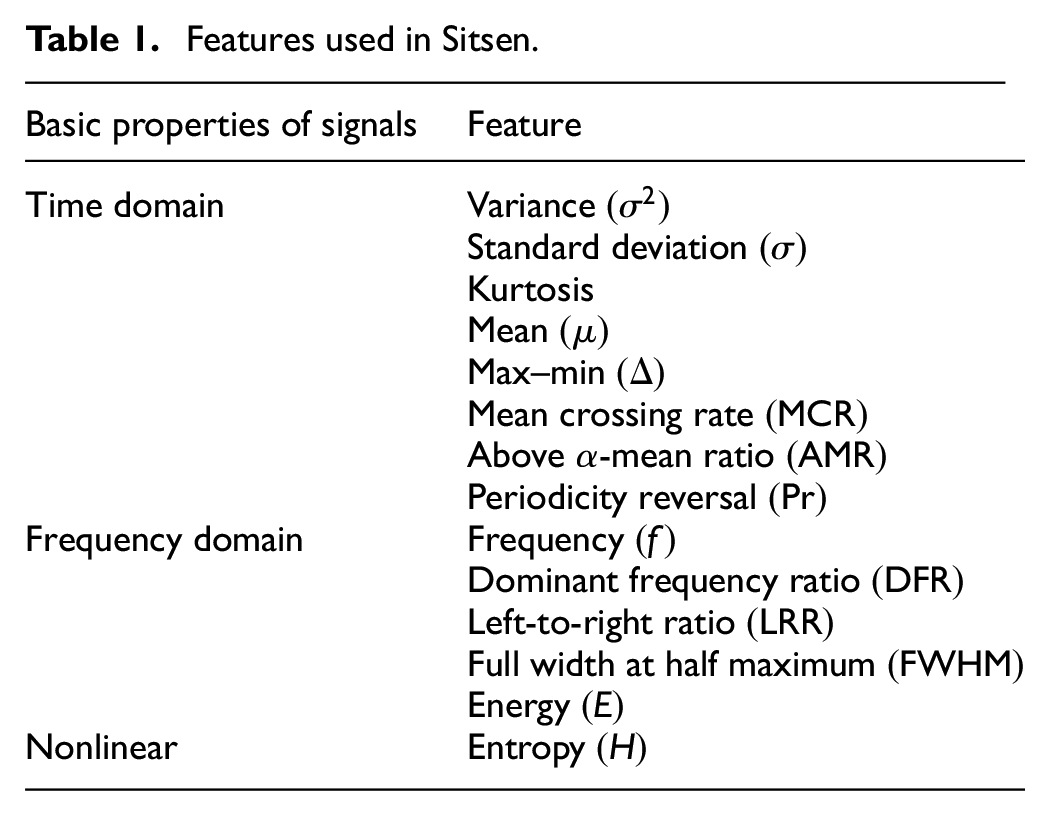
The 14 effective features describe characteristics of the phase sequences in the time domain and frequency domain, and they obtain enough information about the five sitting postures to distinguish each other. In detail, mean
Above α-mean ratio (AMR) measures the ratio of the high-energy frames in a window and parameter

where
Average of top

where
Periodic reversal

where the constants

where

Energy

where
Dominant frequency ratio

where
Left-to-right ratio
We define the amount of information in the signal, denoted as entropy

where
However, we find that some features have lower contribution rates than others, which would result in long system delay. Hence, we need to select useful indicators to classify and judge activities.
PCA is mainly used for data dimensionality reduction. For a multi-dimensional vector composed of the characteristics of a series of examples, some elements in the multi-dimensional vector are not distinguishable. So, our goal is to find those elements with large changes, that is, those dimensions with large variances, and remove those dimensions with little change, so that the features are all ‘fine products’, and the amount of calculation is also reduced.
To deal with this problem, we leverage the PCA algorithm to select effective features which have contribution rate of more than 95%. We use the feature vector after the PCA algorithm as the database for establishing the classification model.
Sitting posture recognition
The machine learning method is widely used in wireless sensing applications. After extracting the effective features from the measured phase sequences for different sitting postures, Sitsen employs BP net classifier to recognize sitting postures.
Based on these obtained features, we need to build a stable model to recognize target posture. Unlike other widely used classifiers (such as K-nearest neighbour (KNN) and Bayes), BP net classifier has a stronger capability of generalization with self-adaption, self-directed learning as well as nonlinear mapping. Specifically, in training stage, we build the fingerprint database with extracted features, and we employ a stochastic gradient algorithm to train the model. In testing stage, we only put the features obtained from raw signal into the model. The final output of model is the recognized sitting posture.
Implementation and evaluation
Implementation
As shown in Figures 7 and 8, we implement Sitsen with one passive tag, an Impinj R420 RFID reader with a fixed frequency of 924.375 MHz, and an RFID directional antenna in an office. The maximum transmission power of the RFID antenna used in this article is 30 dBm, and the maximum gain is 12 dBi. In this article, we set the transmission power of the RFID reader to 24 dBm. The reader is connected to a laptop through an Ethernet cable, and the laptop is used for data collection. The antenna is connected to the reader with ultra high frequency (UHF) coaxial feeder and radiates outward the electromagnetic wave signal emitted by the reader. The tag receives and feeds back the signal to the reader. We also used a camera to record the ground truth, and we labelled the sitting postures manually.

Experimental equipment.
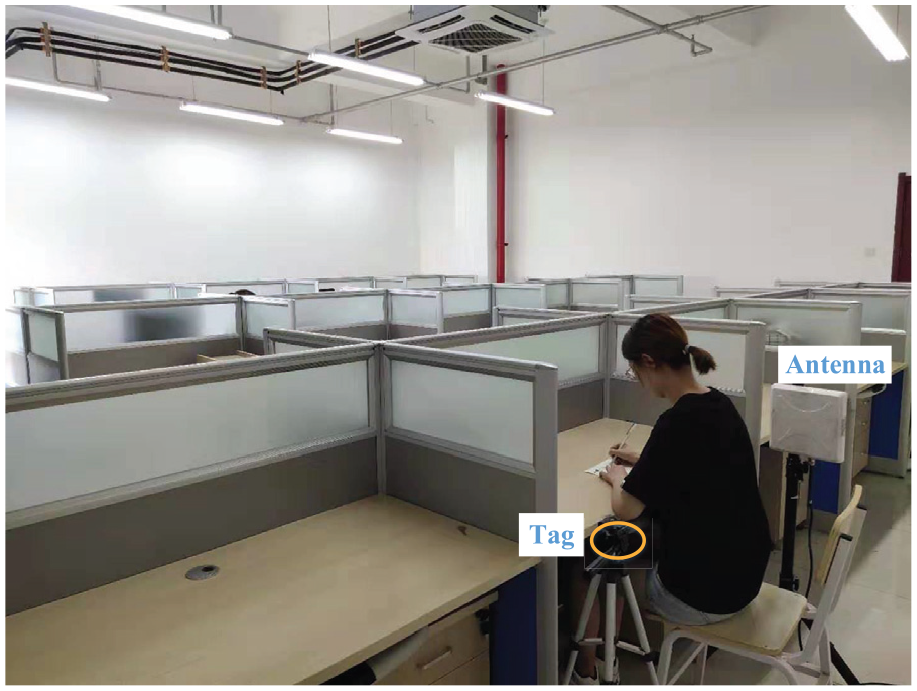
Experimental scenario.
As for the condition of volunteers, we recruited 10 volunteers, including 6 females and 4 males with the ages varying from 18 to 25 years old, the heights varying from 1.6 to 1.83 m and the weights varying from 43 to 70 kg. Figure 9 shows the heights, weights and body mass indexes (BMIs) of volunteers. Considering how to guarantee the robustness during the experiment, including how to ensure the consistency on the appliance to different people when deploying experiments, our team also focus on the choice of different volunteers. Each volunteer sits on a seat which is between the tag and antenna with the distance of 90 cm. Seven volunteers sit for 5 min as a group and 25 min in total for posture recognition while three volunteers sit for 75 min.

Heights, weights and BMIs of users.
The sitting posture recognition method is programmed in MATLAB R 2019a. We use BP net as our method and set the parameters, constructing the model whose maximum number of iterations is
Evaluation metrics
We use the cross validation and employ four metrics including the accuracy, F1 score, precision and recall which are widely used in machine leaning field to evaluate the system performance. Accuracy is the proximity of measurement results to the true value. Precision is the number of correct positive results divided by the number of all positive results returned by the classifier. Recall is the number of correct positive results divided by the number of all relevant samples (all samples that should have been identified as positive). F1 score is a measure of a test’s accuracy, which considers both the precision and the recall



where TP, FP, TN and FN mean the true positive, false positive, true negative and false negative, respectively.
Evaluation results
The performance of sitting posture recognition
Figure 10 illustrates the average sitting posture recognition accuracy of

Recognition accuracy of volunteers.

Recognition accuracy for five postures.
The performance of different deployment distances
We conducted experiments to detect Posture A (sitting upright) at positions where the distances between the tag and the antenna were 80 cm, 90 cm, 1 m, 2 m, 3 m, 4 m and 4.5 m. The results show that the waveform detected at 4–4.5 m is poor and the breathing is weak. Conversely, it is stronger within 1 m as shown in Figure 12. We judge that 3 m is the range of the respiratory limited distance. We can keep the tag and the antenna as far as the distance with 3 m in the office. Therefore, it is a better choice for worker to place our device in their office where area is about 3 × 3 m2. What’s more, our system does not need to wear sensor equipments, which is a significant advantage that will not affect people’s daily work.

Phase sequences of one user in different distances between tag and antenna.
Comparison with the state-of-the-art work
Since our system uses wireless signals for sitting posture recognition, we compare our system with state-of-the-art sitting posture recognition systems. As shown in Table 2, we compare the accuracy with the systems which mainly based on video and wearable equipment. With similar accuracy, our system does not bring privacy issue and has no need to wear any equipment. Meanwhile, our detection method has the advantage of device-free, which increases the comfort of the user. By the way, compared with video and wearable sensor methods, our system is cheaper and cost-effective, because one RFID tag only need 1 dime and our equipment have long durable years.
Comparison with the state-of-the-art work.

RFID: radio frequency identification.
Also, we have done some work to compare with previous sitting posture recognition system based on wireless signals. SitR 27 employs just three low-cost and lightweight RFID tags pasted to a user’s back and a reader antenna placed on the back of a chair to recognize seven habitual sitting postures, and they achieve high performance for sitting posture recognition through detailed system design. Here, we randomly selected three volunteers to do the following experiments to compare SitR and Sitsen.
First, we realized SitR, including its system deployment and data processing methods, then we collected the data of seven different sitting postures mentioned in SitR to process. The experimental results show that SitR can achieve robust and high performance. At the same time, we used these data to verify our method. The average recognition accuracy of seven sitting postures of three volunteers is 98.37%. The experimental results show that our data processing method is effective for distinguishing the seven sitting postures mentioned in SitR. Then, we used our system deployment to collect the data of seven different sitting postures mentioned in SitR, and used our method and the method in SitR to process them, respectively. The experiment results show that our system recognize seven different sitting postures with reaching an average accuracy of 98.43% while SitR recognize seven different sitting postures with reaching an average accuracy of 96.67%. Next, we evaluated the recognition rate of the two methods for the five sitting postures mentioned in our essay. The experiment results show that our system is able to recognize five different sitting postures with reaching an average accuracy of 98.02% while SitR is able to recognize five different sitting postures with reaching an average accuracy of 95.67%.
Compared with SitR, our method is more robust to distinguish sitting postures which have high similarity. Unlike SitR, which regards forward leaning as a large class of sitting posture, our system classifies the forward leaning angles in more detail, which makes the sitting posture have higher similarity. Therefore, our method can get higher recognition rate for seven different sitting postures mentioned in SitR, and slightly lower recognition rate for the five sitting postures mentioned in our essay. In addition, we have similar accuracy with their work, but we do not need to paste tags on the user and we made the system deployment more flexible. In a word, we verify the robustness and stability of our method as well as the reliability of SitR.
Discussion
We discussed some of the limitations and opportunities for system improvements.
Diversity of sitting postures
Our work mainly detects five sitting postures. However, the sitting postures are full of diversity. The performance of Sitsen may decrease if we do not update the training set or increase other sitting postures. In the future, we will try to recognize and monitor more sitting postures to make our system more suitable.
Diversity of users
Due to the individual differences of users, users in different height range will need appropriate equipment deployment. Therefore, we combine some characteristics of users to deploy the equipment properly, so as to achieve the best effect and improve the robustness of the system.
Deployment of RFID devices
In our current experiments, the tag is attached to the tripod. Because RFID tag and read antenna are small and light, they can be put in the office without occupying too much area. In future work, we will explore different tag deployment strategies which may relax the requirement. Also, we will try to make the device smaller, allowing more people to try and accept the sitting posture recognition using our system.
Conclusion
In this article, we introduce Sitsen, in which the RFID technology is applied to the sitting posture recognition. While not requiring to wear sensor equipment, the deployment of our system is becoming more flexible. As long as a tag and an antenna are placed on both sides of user, our system can successfully recognize five habitual sitting postures. The experiment results show that our system is able to recognize user’s five different sitting postures with reaching an average accuracy of 97.02%.
Footnotes
Handling Editor: Jyotsna
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61602382), the Science and Technology Innovation Team Supported Project of Shaanxi Province (2018TD-O26), the Key Research and Development Program of Shaanxi Province (nos 2018ZDXM-GY-036 and 2019GY-012) and the Shaanxi Key Laboratory of Intelligent Processing for Big Energy Data (no. IPBED7).