
Abstract
Multi-frequency signals have been accessible for most Global Navigation Satellite Systems . Existing studies have verified that using multi-frequency extra-wide-lane and wide-lane observations can realize decimeter, sub-decimeter and even centimeter rapid positioning. In this paper, a tightly combined wide-lane real-time kinematic positioning method using triple-frequency GPS and BDS is proposed. The differential inter-system bias is taken into consideration so that an inter-system differencing model is formed. Due to the influence of different frequencies between GPS and BDS, the double-difference wide-lane ambiguity between GPS and BDS reference satellites and the single-difference ambiguity of the BDS reference satellite are estimated jointly with the wide-lane differential inter-system bias. Thus, a full-rank model can be obtained without any external calibration. Using the stability of wide-lane differential inter-system bias in the estimation from epoch to epoch, redundant observations can be introduced, therefore the strength of the positioning model can be enhanced. Positioning performance under simulated obstructed environments is evaluated. The results show that the inter-system model can effectively improve the positioning compared with the conventional intra-system model for the severely obstructed situations.
Keywords
Introduction
Multi-frequency signals have been accessible for most Global Navigation Satellite Systems (GNSS), such as BDS, Galileo, QZSS and some modernized GPS and GLONASS satellites. Combined use of multi-system and multi-frequency signals can significantly improve the GNSS positioning performance in terms of accuracy, reliability and availability, especially for the applications in obstructed environments.1–4 Particularly, with multi-frequency observations, some extra wide-lane (EWL) and wide-lane (WL) ambiguities can be fixed very easily, and thus can be used as more precise ambiguity-free range observations than pseudorange.5–7 Based on triple-frequency or quad-frequency observations, many researchers have verified that using ambiguity-fixed EWL and WL can realize decimeter, sub-decimeter and even centimeter rapid positioning, whether for the differenced real-time kinematic (RTK) positioning8–10 or the un-differenced precise point positioning.11–14 These findings are very attractive for the GNSS users in the precise navigation market with sub-meter or decimeter-level accuracy demand. Compared with the centimeter-level accuracy, they prefer the faster, more continuous and more reliable positioning and navigation performance.15,16
When using the observations from different systems in RTK positioning, conventional intra-system model and the inter-system model are the two commonly used models. 17 If the differential inter-system biases (DISBs) can be handled properly, the inter-system model is beneficial to maximize the redundancy, and thus will be helpful for the positioning in severe observation environments where the satellite signals are easily blocked.18,19 Many researchers have proposed related strategies to process the code and phase DISB. Odijk et al., 18 Odijk and Teunissen, 20 Odolinski et al., 21 Paziewski and Wielgosz 22 all found that for the overlapping frequencies between two systems (e.g. GPS/QZSS L1 and Galileo E1), the code and phase DISBs between two systems could be canceled out for baselines with the same receiver types. For baselines using mixed receiver types, although DISBs cannot be directly eliminated, they can be calibrated in advance since they are stable with time. Tian et al. 23 and Shang et al. 24 also proposed the particle filter-based real-time estimation method of inter-system phase bias, and thus permitting integer ambiguity resolution (AR) without external calibration. While for the non-overlapping frequencies between two GNSS systems, even if the phase DISB can be calibrated, the inter-system double-difference (DD) ambiguities cannot still be fixed to integers due to the correlation between the phase DISB and the single-differenced (SD) ambiguity of the pivot system. 25 For this problem, Gao et al.26,27 proposed an inter-system AR and RTK positioning model for GPS and BDS with re-parameterization the inter-system ambiguity and the phase DISB. With this model, both the code and phase DISBs for non-overlapping frequencies were also verified stable, and thus can be estimated in real-time as a random-walk process in the positioning filter with a very small spectrum density. Overall, using inter-system model can improve the positioning performance compared with the conventional intra-system model, especially for those obstructed environments.
In this paper, taking GPS and BDS-2 (referring to BDS in the following sections) as case study, we will further develop the advantage of the inter-system model for the rapid WL RTK positioning with triple-frequency observations. The re-parameterization of the WL ambiguity and WL phase DISB will be derived, so that the intra-system DD WL ambiguities resolved with the commonly used geometry-free model can still support the inter-system positioning.
The rest of this paper is organized as follows: In section “Combined GPS and BDS WL RTK Positioning Model,” the triple-frequency WL GPS and BDS observation models are introduced, including the conventional intra-system model and the proposed inter-system model, as well as the geometry-free AR model for the EWL ambiguity. In section “Stability Validation of GPS-BDS WL DISB,” the stability of GPS and BDS WL DISBs is analyzed. In section “Positioning Experiments,” we mainly test the WL RTK positioning performance using the intra-system and the inter-system model under simulated obstructed environments. Finally, some research findings are summarized in section “Conclusions.”
Combined GPS and BDS WL RTK positioning model
GPS and BDS WL observation equations
In the relative positioning model, the time difference between the two time systems (GPST and BDST) can be eliminated by the between-receiver single difference. The small difference between GPS and BDS coordinate systems can also be neglected for short- and medium-baseline relative positioning of centimeter-level accuracy. 28 Besides, since this paper mainly focuses on the rapid sub-decimeter to decimeter positioning for those short and medium baselines within 30–40 km, the ionosphere-fixed model is adopted and the residual DD tropospheric delays after corrected by empirical model are ignored. Thus, the station-difference observation equations for GPS and BDS can be respectively expressed as


where
Based on the station-difference equations in equation (1), if we fix

Similarly, the conventional intra-system DD model of BDS can be formed as

where
Inter-system model between GPS and BDS
Relative to the conventional intra-system DD model, the inter-system DD observation between GPS and BDS can also be built in a similar way. Since at present all BDS satellites can transmit triple-frequency signals, we treat BDS as the pivot system. In the inter-system model, the phase hardware delay cannot be eliminated, and the corresponding model can be expressed as

where

where,
In equation (6), the estimable WL DISB
In equation (6), the integrated WL DISB parameter is tightly related to the reference satellites of two systems. This means that when any reference satellite of the two systems changes, the estimated DISB parameter needs to be transformed accordingly, so that it can be updated epoch by epoch. Referred to the previous research in Gao et al. (2018), the detailed transformation process from epoch
Transformation of DISB parameter when BDS or GPS reference satellite changes.

BDS: beidou navigation satellite system; DISB: differential inter-system bias; GPS: global positioning system.
Choosing of the EWL/WL observation and AR
From equation (6), we can see that the DD ambiguities need to be solved in the inter-system model are still the intra-system ambiguities. For triple-frequency GPS and BDS, some optimal EWL/WL combinations for AR can be formed considering the carrier wavelength
Some optimal EWL/WL combinations for triple-frequency GPS and BDS.

BDS: beidou navigation satellite system; EWL: extra-wide-lane; GPS: global positioning system; WL: wide-lane.
In Table 2, GPS
are commonly recommended as the first solved EWL ambiguities with the geometry-free model in equation (7).5–7 In this model, the geometry term and the first-order ionospheric delay can be completely eliminated, thus it is baseline-length independent. Besides, due to the long wavelength and low noise on AR, these two EWL ambiguities can be resolved almost with the success rate of 100% with single epoch under normal observation quality. However, these two EWL observations are not the optimal choice for positioning, since the noises are amplified about 33.2 and 28.5 times, respectively. Therefore, we need to solve the second EWL ambiguities to form the low-noise WL observation for positioning. Among the rest combinations in Table 2, GPS


Once two EWL ambiguities are solved, we can fix any EWL/WL ambiguity by a simple linear combination. From Table 2, overall consideration of the noise and ionospheric delays, we choose (1,-1,0) WL combination both for GPS and BDS as the positioning observation. The integer ambiguity can be obtained with the above resolved two EWL ambiguities, as equation (9)

In equations (7) and (8), due to the influence of measurement noises or ionosphere delays, there is still some risk for the EWL AR with single-epoch. In practice, for further improve the reliability, multi-epoch smoothing can be used. An individual filter can be set for the EWL AR in real-time processing, so that the EWL ambiguities can be updated flexibly along with the variation of elevation angle and the change of the reference satellite. At the same time, the a priori precision

The two thresholds are empirically set as
Stability validation of GPS-BDS WL DISB
In the previous research, the phase DISBs on L1-B1 and L2-B2 have been verified stable in several days for some commonly used receiver brands. 25 Actually, the WL DISB is the linear combination of those on L1-B1 and L2-B2, and thus we can derived that the WL DISB is also stable with time. For further verifying this finding, in this paper, we still use two zero baselines to directly analyze the stability of GPS-BDS WL DISB. In zero baselines, the atmospheric errors and multipath effects can be thoroughly avoided. Data from these two baselines were collected on the campus of Curtin University, Australia. The detailed information can be seen in Table 3. Of the two baselines, the first one uses the same receiver types, while the other one use different receiver types. Since the coordinates are precisely known for the two baselines, DD WL ambiguities can be fixed very easily by directly rounding with single epoch. The strategy proposed in Gao et al. 27 to keep the DISB continuous from the change of reference satellites is adopted here, so that a continuous WL DISB series can be obtained.
Baselines and the corresponding receiver types for the stability analysis of WL DISB.

WL: wide-lane; DISB: differential inter-system bias.
Figure 1 depicts the time series of GPS-BDS WL DISB for the baselines. We can see regardless of the small random terms caused by observation noises, the DISB estimates are very stable generally. Although low-frequency variations appear in the baseline “CUTB-CUBS” with different receiver types, the amplitude relative to the mean value is well within 0.1 cycles for 3 days. The possible reason for this phenomenon is the influence of different frequencies (inter-frequency bias).
26
In practice, in order to that the variations can be fully considered, we can use a random walk process with a small spectrum density, for example.,

GPS-BDS WL DISB series for the two baselines within 3 days.
Positioning experiments
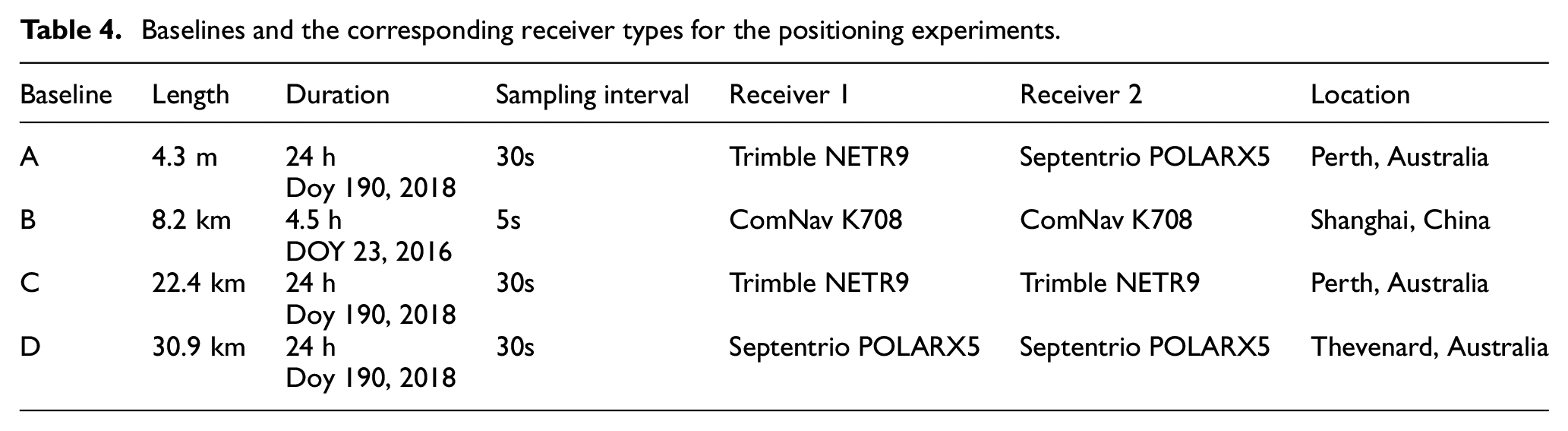
In this section, we mainly test WL RTK positioning performance using the conventional intra-system model and the proposed inter-system model. Four short and medium baselines with baseline lengths from 4.3 m to 30.9 km are used for the positioning experiment. The detailed information of the baselines are listed in Table 4. The Kalman filtering with kinematic positioning mode is used in the positioning calculation. The ambiguities are estimated as constant. The WL phase DISB is estimated as a random walk process with the spectrum density of
Baselines and the corresponding receiver types for the positioning experiments.
As in the previous studies about inter-system model for those overlapping frequencies, a-priori calibration of DISB will strengthen the AR and positioning model to the maximum extent.18,20–22 However, when processing phase DISB with different frequencies, the influence of between-receiver SD ambiguity of reference satellite is hard to be separated from phase DISB. The error of the SD ambiguity will directly introduce bias for the phase DISB. What is more, even though the phase DISB can be precisely calibrated, one also need to face the problem of SD ambiguity again when restart the receivers. Only if the SD ambiguity are precisely solved, the DD ambiguities can be fixed to integers. Thus, in this paper, we only implement positioning experiments with real-time estimation of the phase DISB instead of calibration DISB in advance.
Performance of EWL/WL AR
First, we test the EWL AR performance. Using the longest baseline, that is., the 30.9 km baseline as the case, Figure 2 shows the EWL AR results. For test the AR performance within small epochs, the EWL AR filtering was reinitialized every 10 epochs. Total 288 groups were conducted. Figure 2(a) shows the fractional part of GPS (0,1,-1) and BDS (0,-1,1) EWL ambiguities, where each color represents a GPS or BDS DD satellite pair. We can see almost all fractional part are within ±0.2 cycle. This verifies that the first EWL ambiguity can be resolved very quickly and reliably. Figure 2(b) shows the fractional part of GPS (1,-6,5) and BDS (1,4,-5) EWL ambiguities. We can see that although the fractional part of (1,-6,5) and (1,4,-5) EWL ambiguities are not as centralized as those in (0,1,-1) and (0,-1,1) EWL, most fractional part are still within ±0.2 cycle. By linear combination, Figure 2(c) gives the (1,-1,0) WL AR results, including the number of total DD ambiguities and fixed DD ambiguities. It should be noted that, in all 288 groups, no ambiguity can be fixed successfully with the first epoch, which is mainly caused by the strict threshold of a priori precision of 0.1 cycles. Except the first epoch, there are at least 5 fixed DD ambiguities in all epochs. By comparing the (1,-1,0) WL AR results with the long-term post-processing results, we confirm that all the fixed (1,-1,0) WL ambiguities were solved correctly. Figure 3 further shows the average number of unfixed DD ambiguities with different epochs. We can see within two epochs, 2.62 DD ambiguities cannot be fixed successfully; while within three epochs, only less than one DD ambiguity cannot be fixed successfully. All the above results indicate that very fast and reliable WL positioning can be implemented with only several epochs.

EWL/WL AR results with reinitialized every ten epochs for the 30.9 km baseline: (a) GPS (0,1,-1) and BDS (0,-1,1) EWL. (b) GPS (0,-6,5) and BDS (1,4,-5) EWL. (c) GPS and BDS (1,-1,0) WL ambiguity fixing.

Average number of unfixed DD ambiguities with different epochs.
Comparison of positioning performance using single and combined system
Because only a part of modernized GPS satellites can transmit triple-frequency signals, thus the triple-frequency WL positioning is hardly implemented with single GPS system. In this section, we mainly compare the positioning performance with single BDS and combined GPS and BDS system. For purely analyzing the contribution of combined system on the positioning model, the 4.3 m short baseline, that is., baseline A is used since the DD atmospheric errors can be ignored. The positioning results with single and combined system are shown in Figure 4, where Figure 4(b) and (c) represent the results of intra-system model and inter-system model respectively. The positioning results are obtained with single session solution. Although the filter is not re-initialized after some epochs, according to the previous research, 25 once the ambiguities are correctly fixed for the first time, high-precision phase DISB estimation can be obtained and will be useful to strengthen the dynamic positioning model for the subsequent epochs. Comparing Figure 4(a) and (b), we can see that with limited triple-frequency GPS satellites, combined system can still effectively improve the positioning accuracy compared with the single system, with an improvement of 11.8% /14.4% /21.1% in three directions respectively. Figure 4(c) shows almost the same positioning accuracies with Figure 4(b), which indicates that in this case, the inter-system model performs close with the intra-system model. It can be explained that the visible satellites in the open-sky environment are many enough, so that the redundancy introduced by the inter-system model plays very limited role in the positioning calculation.

Positioning results with single BDS and combined GPS and BDS: (a) BDS. (b) GPS + BDS intra system model. (c) GPS + BDS inter system model.
Comparison of positioning performance with intra-system model and inter-system model under obstructed environments
In order to test the positioning performance under worse satellite visibility, the positioning experiments are also carried out under simulated obstructed environment. The obstructed environments are simulated with only four BDS satellites involved in positioning, which are chosen in descending order of elevation. The available satellites and position dilution of precision (PDOP) of each baseline are shown in Figure 5. We can see, in some periods, the observation structures are very poor since the PDOP are very large even near 100, especially for Baseline A, C, and D.

GPS and BDS satellite visibility and PODP under simulated obstructed environment: (a) Baseline A. (b) Baseline B (c) Baseline C. (d) Baseline D.
The positioning errors using the intra-system model and the inter-system model of each baseline are shown in Figure 6. In Figure 6, the float solution depicted by red dots means that in these epochs only less than four DD WL ambiguities can be fixed. The root mean square (RMS) of positioning errors of each baseline with the two models are listed in Table 5. We can see that compared with the intra-system model, the positioning results can be effectively improved using the inter-system model, especially for Baseline A, C and D. Generally, about 20% or more improvement in three-dimensional positioning accuracy can be achieved. For baseline B, due to the better observation structure, the positioning improvement is not as much as that in the other three baselines, but slight improvement can be still achieved. Overall, the worse the observation structure is, the more improvement of positioning accuracy can be obtained using the inter-system. When satellite observation structure becomes better, the positioning performance also becomes closer for the two models. However, the positioning performance with the inter-system model is always better than or at least equivalent with that using the intra-system model.

Combined GPS and BDS positioning results under simulated obstructed environments using intra-system model and inter-system model for the four baselines: (a) Baseline A: 4.3 m. (b) Baseline B: 8.2 km. (c) Baseline C: 22.4 km. (d) Baseline D: 30.9 km.
Statistics of positioning RMS with intra-system model and inter-system for the four baselines.

RMS: root mean square.
Conclusion
In this paper, we proposed a tightly combined WL RTK positioning method between triple-frequency GPS and BDS. In this model, WL DISB between the two systems are taken into consideration so that an inter-system model is formed. For solving the rank-defect problem in this inter-system model, the DD WL ambiguity between GPS and BDS reference satellites and the SD ambiguity of the BDS reference satellite were estimated jointly with the differential WL phase DISB. The performance of GPS and BDS EWL AR with the simple geometry-free model was assessed. The results showed that within only two or three epochs, reliable EWL AR can be achieved with the strict thresholds. Thus, nearly instantaneous WL RTK positioning can be implemented. In the positioning experiments, the results showed that combined GPS and BDS can effectively improve the positioning compared with single BDS system, although only limited triple-frequency GPS satellites are available at present.
In the proposed inter-system model, the stability of WL DISB can be used in the estimation from epoch to epoch. For multi-epoch positioning, redundant observation can be introduced, and thus the strength of the positioning model can be enhanced. Although the computation complexity of the proposed model is slightly larger than the conventional intra-system model as an additional DISB parameter is introduced, positioning experiments under simulated obstructed environments indicated that the inter-system model can effectively improve the positioning performance. About 20% or more improvement in three-dimensional positioning accuracy can be achieved for some severely obstructed experiments.
Although only GPS and BDS-2 triple-frequency observations are analyzed in this paper, the method can be similarly applied for other multi-frequency GNSS systems, for example., Galileo, BDS-3 and QZSS.
Footnotes
Acknowledgements
The authors gratefully acknowledge GNSS Research Center of Curtin University, the Multi-GNSS Experiment (MGEX) and Geoscience Australia for providing the multi-system and multi-frequency GNSS data.
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the National Natural Science Foundation of China (Grant No. 41904022, 41774027) and the Fundamental Research Funds for the Central Universities (2242020R40135).