
Abstract
Multiple-input multiple-output is a commonly used technology supporting for high-rate transmission over frequency-selective fading channels with multiple antennas. Vertical-Bell Laboratories Layered Space-Time is a detection method of a multiple-input multiple-output system, which establishes a direct correspondence between antennas and layers. Studies demonstrate that multiple-input multiple-output Vertical-Bell Laboratories Layered Space-Time is a meaningful way for underwater acoustic networks of high performance. However, considering the hardware constraints and energy consumption, achieving a trade-off between the bit error ratio and complexity is a crucial issue for underwater acoustic networks of multiple-input multiple-output Vertical-Bell Laboratories Layered Space-Time systems. This article proposes a novel signal detection algorithm of multiple-input multiple-output Vertical-Bell Laboratories Layered Space-Time. First, we address the unitary matrix of the underwater acoustic channel by LDLH decomposition. Second, we order the detection sequence based on the permutation matrix. Third, we detail the implementation of interference cancelation and slice processing. Finally, we perform experiments for comparing the bit error ratio, energy consumption, processing delay, and complexity of the proposed algorithm with zero-forcing Vertical-Bell Laboratories Layered Space-Time, minimum mean square error Vertical-Bell Laboratories Layered Space-Time, and maximum likelihood Vertical-Bell Laboratories Layered Space-Time. Results indicate that our algorithm maintains bit error ratio and the processing delay to that of maximum likelihood Vertical-Bell Laboratories Layered Space-Time algorithm. However, it reduces the energy consumption, which achieves a good trade-off between performance and complexity. This work supports on constructing underwater acoustic networks of multiple-input multiple-output Vertical-Bell Laboratories Layered Space-Time system.
Keywords
Introduction
Underwater acoustic networks (UANs) have a wide range of application scenarios, such as marine data collection, environmental monitoring, resource survey, earthquake and tsunami monitoring, auxiliary navigation, ocean robots, and autonomous underwater vehicle (AUV) control 1 . Comparing with terrestrial networks, an UAN has some defects, such as high path attenuation, severe multipath effects, 2 Doppler diffusion, 3 limited bandwidth, and fast time-varying channel. In addition, the characteristic of the underwater acoustic (UWA) channel is usually considered, for example, scattering, reflection, and delay. The multipath propagation of UWA channels is large, resulting in severe inter-symbol interference (ISI), which influences the received signal quality and requires channel equalization for compensation. 4
Multiple-input multiple-output (MIMO) is a technology for multiplexing based on multiple transmission and receiving antennas in space. Studies demonstrate that it provides multiplexing gain and diversity gain. 5 An MIMO system based on space–time coding suppresses the influence of fading to obtain higher channel capacity and improves the quality of the UAN greatly. 6 It is a solution to realize the high-performance communication based on layered space–time codes (STCs), which has a good potential for improving the spectrum utilization. 7 Vertical-Bell Laboratories Layered Space-Time (V-BLAST) is a detection method of an MIMO system, which establishes a direct correspondence between antennas and layers. In an MIMO V-BLAST system, the ith data stream is directly sent to the ith antenna after encoding, and the correspondence does not vary periodically. The data stream is an ongoing vertical column vector in the time and space domain. Therefore, in the detection procedure, as long as we know which antenna the data are sent, we can determine the layer it belongs to.
Generally, linear detection methods such as zero-forcing (ZF), minimum mean square error (MMSE), or non-linear ones, for example, maximum likelihood (ML) or sphere decoder (SD) are adopted in MIMO V-BLAST systems. Experiments show that linear methods have low complexity. However, in the time-varying UWA channel, the bit error ratio (BER) is extremely high, and the performance cannot be guaranteed. Although non-linear algorithms maintain a better performance, their complexity is high, 8 which increases the design difficulty and the manufacturing cost.
In addition, the high complexity will lead to the rapid energy exhaustion of nodes. As we know, nodes are powered by batteries, and it will shorten the survival time of UANs. Consequently, in MIMO V-BLAST systems, it is a hot topic for designing a detection algorithm based on the trade-off between performance and complexity.
This article proposes a signal detection algorithm of an MIMO V-BLAST system based on improved MMSE. The main contributions of this article list as follows: first, we design a method for resolving the unitary matrix Q of the UWA channel based on LDLH decomposition; second, we use the permutation matrix to sort the detection sequence; third, we implement the interference elimination and slice processing; and finally, we perform experiments for comparing the BER, energy consumption, processing delay, and complexity of the proposed algorithm with ZF V-BLAST, MMSE V-BLAST, and ML V-BLAST. The experimental results show that our algorithm maintains the BER and the processing delay, which are equivalent to that of ML V-BLAST. However, it reduces the energy consumption and complexity, which achieves a good trade-off between performance and complexity.
The remainder of this article is organized as follows: section “Related work” provides an overview of the related work. Section “The signal detection algorithm based on improved MMSE” describes the proposed signal detection algorithm. The simulation is discussed in section “Simulation and results.” Finally, section “Conclusion” concludes this article.
Related work
At present, significant progress has been made in signal detection of underwater MIMO V-BLAST systems. Y Jiang and X Bai 9 propose a BLAST-based UAN, in which V-BLAST encoding is utilized in the transmitter. The simulation proves that it overcomes multipath interference effectively and achieves a significant increase in data transmission rate. Q He et al. 10 present an MMSE-based iterative equalization method for UANs. In the algorithm, the UWA channel is split into sub-channels for constructing a multiple-input, multiple-output orthogonal frequency-division multiplexing (MIMO-OFDM) system. MMSE equalization is applied to the inter-channel interference (ICI). Simulation results demonstrate that the performance is improved.
KS Vishvaksenan et al. 11 propose a multi-carrier system for UANs, in which dual space–time transmission diversity (DSTTD) is implemented at the transmitter end, and the fast Fourier transform (FFT) at the receiver end. Simulation illustrates that it provides a better BER by reducing the effect of the channel interference and acoustic noise while having a lower signal-to-noise ratio (SNR). Z Yang and Y Zheng 12 design a signal detector for a UWA MIMO system, which uses the improved proportional normalized least mean square (IPNLMS) algorithm for channel estimation. Simulation demonstrates that the BER is improved.
I Nelson et al. 13 investigate the performance of an underwater MIMO-OFDM system based on turbo codes (TCs), which regard the TC as a channel encoder and implement a non-linear detector based on ZF. Simulation shows that it provides an achievable BER with a lower SNR. Y Zhang et al. 14 propose a channel estimation scheme for underwater MIMO communication based on the soft decision. Experimental results indicate that the channel estimation has greater improvement in performance. J Han et al. 15 propose low-complexity per-vector and block equalization algorithms of MIMO orthogonal signal division multiplexing (OSDM) for time-invariant and time-varying channels, respectively. Simulation results demonstrate that these algorithms have only a linear complexity in the transformed domain. MT Altabbaa 16 designs a channel estimation algorithm for UWA channels undergoing Rayleigh fading with impulsive noise. The simulation shows that the proposed approach outperforms the compressed sensing-based matching pursuit (MP) algorithm and the projected matching pursuit (PMP), and the basis pursuit-based generalized approximate message passing (GAMP) algorithm.
S Zhao et al. 17 propose an adaptive turbo equalizer for differential OFDM systems in UWA communications. Experimental results demonstrate that it outperforms the MMSE-based turbo equalizer for coherent systems in medium-to-high SNR region, while reducing complexity. X Zhang et al. 18 propose a delay-based detection algorithm for layered space–time signals of UWA communications. Experiments show that it achieves a performance gain up to 4 dB for a UAN of 2 × 2 MIMO. BL Thanh et al. 19 propose a method that combines MMSE and interference cancelation to suppress the ICI of UWA channels in an MIMO-OFDM system. In the algorithm, the received signal is separated into several groups, which are detected in successive iterations. Experiments show that it has a significant improvement in BER.
F Jiang et al. 20 present a block Gauss–Seidel method for large array signal detection in UANs. Results demonstrate that the proposed scheme achieves almost the same performance compared to original Gauss–Seidel method, but with less processing delay. T Ebihara et al. 21 present a UWA communication scheme by combining the Doppler-resilient orthogonal signal division multiplexing (D-OSDM) and MIMO signaling. The simulation results show that MIMO D-OSDM achieves better BER than the benchmarks.
In summary, there are some studies focus on the signal detection in UANs. They verify the feasibility of MIMO V-BLAST from different perspectives. However, most of the studies are difficult to achieve a compromise between performance and complexity. Therefore, there are still considerable gaps in the actual applications of MIMO V-BLAST for UANs.
The signal detection algorithm based on improved MMSE
Modeling of the underwater MIMO V-BLAST system
In this article, we model an underwater MIMO V-BLAST with M transmitting antennas and N receiving ones. Because V-BLAST is the spatial multiplexing of an MIMO system, to improve the spectral efficiency, the transmission signal is not encoded. Therefore, the receiving end just has a unique solution in case of
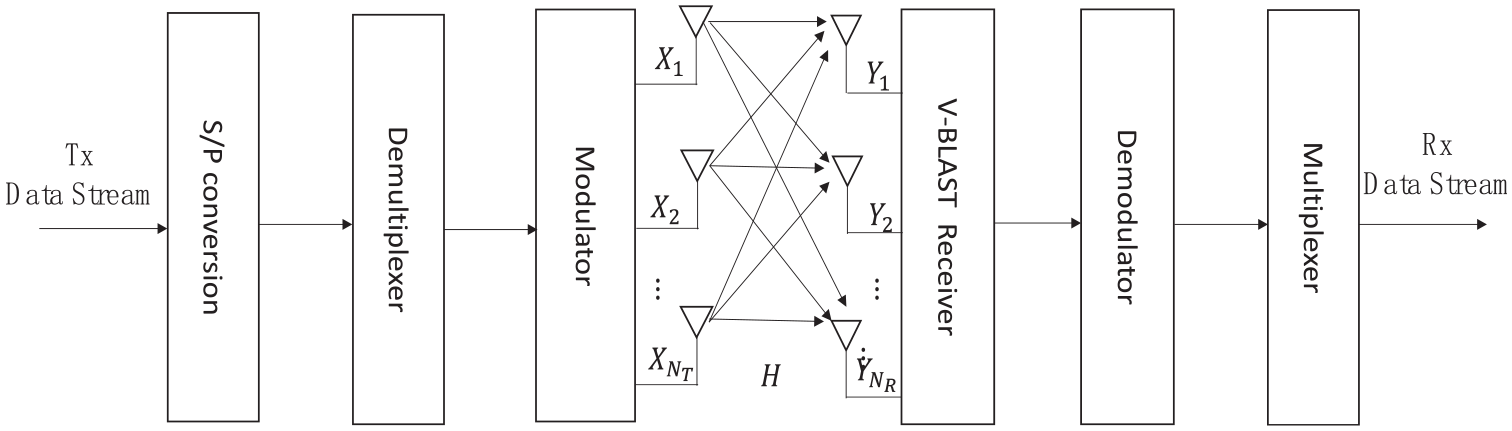
The architecture of an MIMO V-BLAST system.
In the system, the data stream is split into M sub-streams via the de-multiplexer at the transmitting end, and each one is transmitted after being converted into a symbol by a modulator. Antennas at the receiving end will receive symbols. The signal vector is received by the V-BLAST receiver and is able to be resolved and converted into M sub-streams via the demodulator. At the same time, sub-streams are transformed into data streams through a multiplexer.
To resolve the independent signal at the transmitting end, we assume that the UWA channel as a Rayleigh fading one in a rich scattering environment. 22 Given that in an underwater MIMO V-BLAST system, the received signal vector can be expressed as equation (1)

where equation (1) is converted into matrix form, as shown in equation (2)
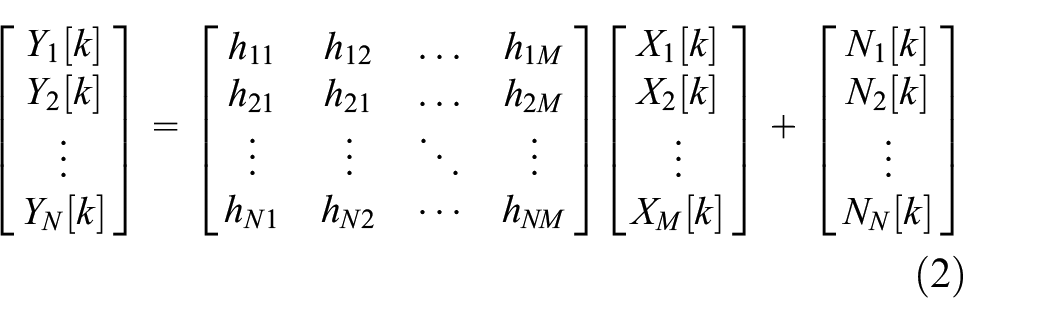
In equation (2),
Frame is the data unit of a V-BLAST system;
23
the structure of which includes a training sequence of length

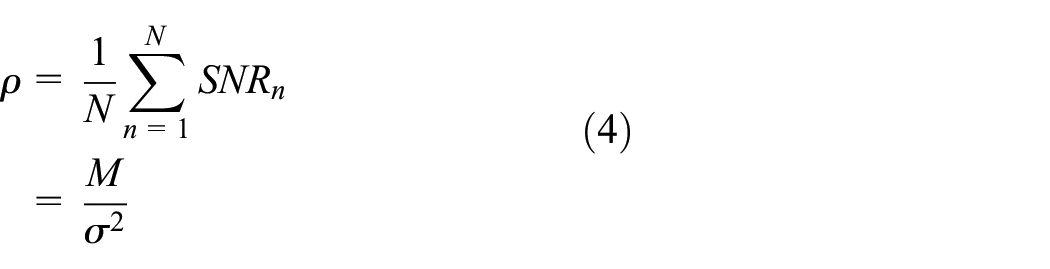
We consider that each receiving antenna has the same noise power, and the channel coefficient is 1. Thus, the average SNR received in an MIMO V-BLAST system is
The detection procedure of an MIMO V-BLAST system
In the detection procedure of an MIMO V-BLAST system, only the signal of a transmitting antenna is stripped in a round. The detection algorithm will be executed iteratively until all signals are detected. Therefore, the detection sequence will affect the performance of the algorithm. The detection procedure of an MIMO V-BLAST system is shown as follows:
Step 1: estimating the UWA channel information which includes the channel matrix and the noise covariance.
Step 2: determining an optimal detection order, that is,
Step 3: sampling signal vectors and implementing the signal detection based on the ZF vector set, as shown in equation (5)

where
Step 4: slicing the signal

Step 5: assuming

where
In the detection algorithm, we estimate the channel information in Step 1. Therefore, Step 2 is the core procedure, which is to determine an optimal detection order. Then, in Step 3, we sample the signal vector and implement the signal detection based on the ZF vector set. Since it adopts frames as transmission units in the MIMO V-BLAST system, the payload processing part has exact the same sequence to dispose samples of the signal vector. Consequently, handling the optimal detection order is the main work and the most complicated part of the algorithm.
A detection algorithm based on improved MMSE
In this article, a detection algorithm based on improved MMSE is proposed. It mainly includes the LDLH decomposition for solving the channel unitary matrix Q, the detection ordering based on matrix permutation, and interference cancelation and slicing processing.
The LDLH decomposition for solving the UWA channel unitary matrix Q
In this stage, we first set the UWA channel as a global channel matrix
The signal decomposition is the primary work. The objective function of MMSE is to minimize the mean square error (MSE) between the transmitted signal vector

where H is a linear combination coefficient matrix of

where

To simplification, we suppose that

Then, we get that

Therefore,

Since R is a Hermitian matrix of positive definite in equation (11), and the inverse matrix Q can be solved by the LDLH or Cholesky decomposition. Because the LDLH decomposition does not require the root operation; therefore, the complexity is less than that of the Cholesky method. 24 In this article, we use LDLH decomposition, as shown in equation (14)

where L is a lower triangular matrix of
Let

Therefore, the inverse matrix Q of R is expressed in equation (16)

where

where
The detection sequence ranking based on the matrix permutation
In the above steps, Q has been obtained based on LDLH decomposition. In this stage, we should determine the optimal detection order, that is, to locate the smallest element on the diagonal of Q accordingly.
After solving Q, we ascertain the kth element as the smallest unit on the diagonal of Q, which is an optimal detection order. To facilitate the order reduction of Q, we swap the kth element and the mth one. The swapping procedure can be obtained based on the permutation matrix

where

where

where

where
Let

According to equation (22), the expression for solving
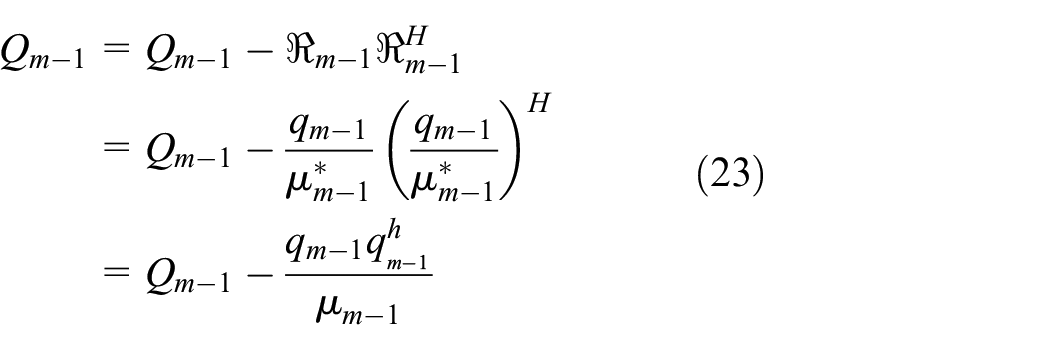
where
Interference cancelation and slice processing
After the above two stages, it is necessary to perform the interference cancelation and slicing of the signal. In the payload processing part of an MIMO V-BLAST frame, according to the optimized detection sequence, the signal detection and interference cancelation are performed based on the optimal detection order for each signal sample. The ordered ZF vector is expressed as
where
Given the output of an MIMO V-BLAST system as

In equation (25),

Supposing a detection sequence set

In an MIMO V-BLAST system, as long as each column of

Therefore,

The pseudo-code of the algorithm is expressed as follows:

Simulation and results
In this article, we employ WOSS 26 to build the experimental environment and perform the detection algorithm on the simulation platform which we have developed. 27 We execute the Monte Carlo simulation based on MATLAB and compare the performance and complexity of our algorithm with ZF V-BLAST, MMSE V-BLAST, and ML V-BLAST. The main experimental parameters are listed in Table 1.
Experimental parameters.

QPSK: quaternary phase-shift keying; OFDM: orthogonal frequency-division multiplexing; FFT: fast Fourier transform.
Performance comparison of the four algorithms
BER is an important indicator to verify the performance of the detection algorithm.
The BER comparison under different numbers of antennas
In this article, we set an MIMO V-BLAST system with two transmitting antennas, and the receiving antennas are 2, 4, 6, and 8, respectively. We compared the BER of our algorithm with ZF V-BLAST, MMSE V-BLAST, and ML V-BLAST. The BER under a different number of antennas is shown in Figures 2–5. It is clear that BER of the four algorithms has a downward trend as the SNR increases. As the number of antennas increases, the BER of our algorithm and ML V-BLAST decreases greatly, while that of the ZF V-BLAST and MMSE V-BLAST does not vary considerably.
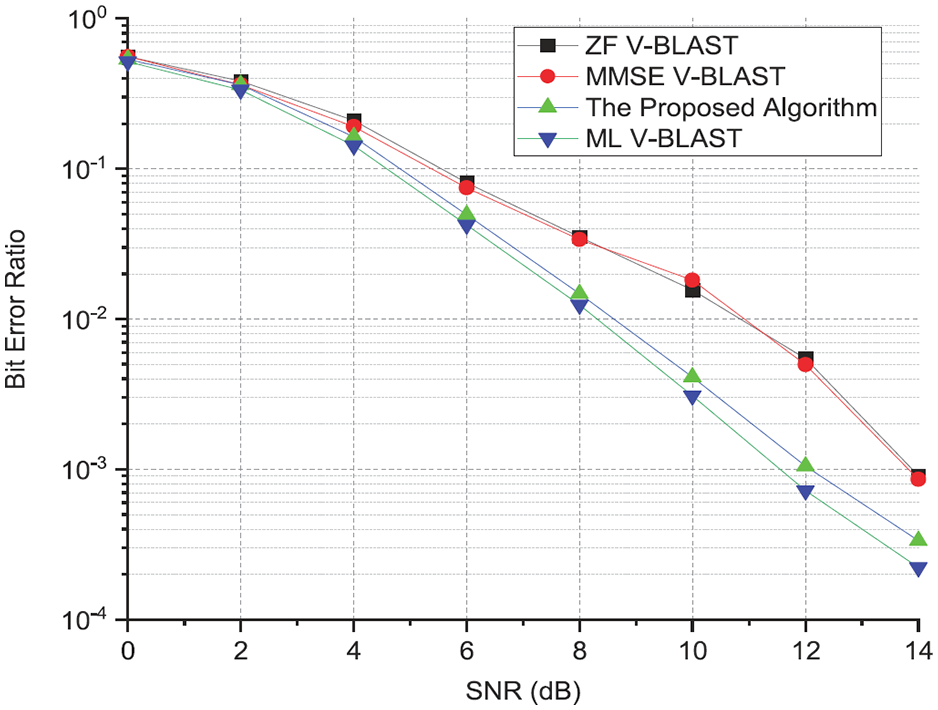
The comparison of BER with 2 × 2 antennas.

The comparison of BER with 2 × 4 antennas.

The comparison of BER with 2 × 6 antennas.

The comparison of BER with 2 × 8 antennas.
Although the multi-input interference is eliminated, the noise is multiplied by the weighting matrix in ZF V-BLAST. In MMSE V-BLAST, it considers the influence of noise; therefore, the performance is superior to that of ZF V-BLAST, whether it is at a low SNR or a high one.
Our algorithm is based on improved MMSE, and we use LDLH decomposition to resolve the optimal detection sequence. Depending on the sequence, each signal sample is checked and eliminated the interference in order. Therefore, the BER of our algorithm is close to that of ML V-BLAST.
The performance comparison in massive MIMO systems
We conduct the performance comparison for the four algorithms in massive MIMO systems. We design 16, 32, and 64 hydrophones (antennas) on the receiving end. These hydrophones are arranged in a line array and kept at a certain distance to ensure that there are no grating lobes.
To reduce energy consumption, we just give a scenario of single-user MIMO. We compare the BER of the four algorithms with increasing the receiving antennas as the SNR raises. As shown in Figure 6, with the number of antennas increases, the BER of the four algorithms shows a downward trend. In contrast, the BER of our algorithm is slightly higher than that of ML V-BLAST.
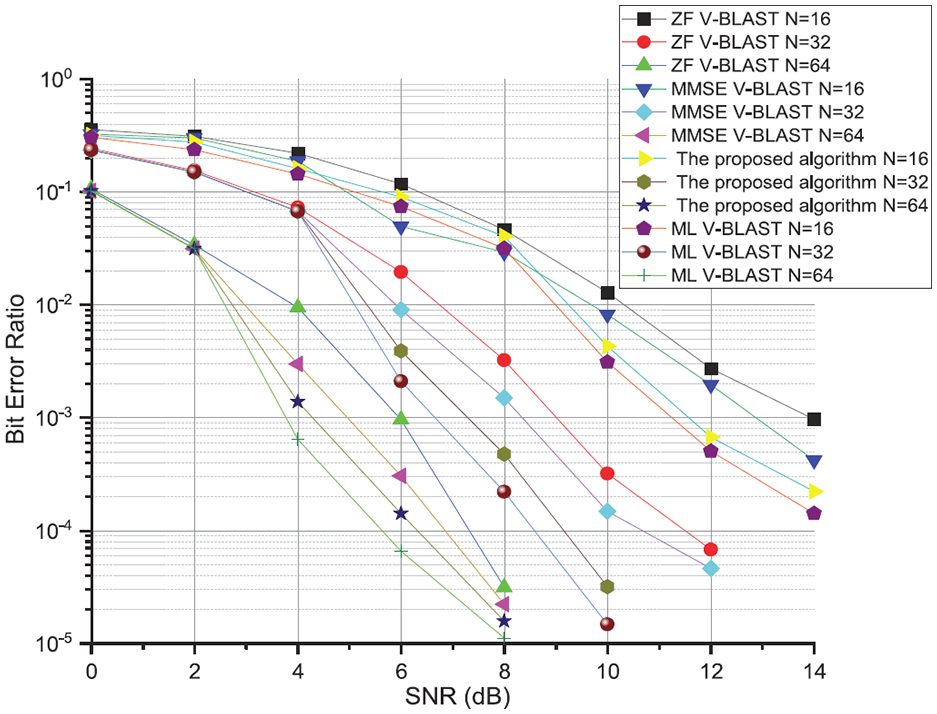
The comparison of BER in massive MIMO systems.
The performance comparison under different bandwidth conditions
In an UAN with limited energy and propagation speed of acoustic signal, it is critical to compare the performance of signal detection algorithms under different bandwidth conditions.
Figure 7 shows the BER comparison of the four detection algorithms under three bandwidth conditions, which are 3, 4, and 6 kHz. It can be seen that the BER of the four algorithms has a difference in certain bandwidth conditions. As SNR increases, the BER of each algorithm has a downward trend. However, as the bandwidth increases, the BER of the four algorithms has an upward trend, and the higher the bandwidth, the higher the BER. It is clear that the BER of our algorithm is close to that of the ML V-BLAST.

The BER comparison of the four detection algorithms under three bandwidth conditions.
As shown in Figure 7, when the SNR is less than 4 dB, the BER of four algorithms under different bandwidths is basically the same. For example, when SNR is 2 dB, the BER of ZF V-BLAST under the three bandwidth conditions approaches 10−1, and the BER of MMSE V-BLAST is slightly lower than that of ZF V-BLAST. In contrast, the BER of our algorithm approaches 10−2, which is close to that of ML V-BLAST. When the SNR is 4 dB, the BER of ZF V-BLAST under the three bandwidths is approximately 10−1, and that of MMSE is lower than 10−1. By comparison, the BER of our algorithm is 10−2, and the BER of MMSE V-BLAST is close to that of our algorithm, which is already lower than 10−2. However, when the SNR is 6 dB, the BER of the four algorithms under three bandwidth conditions has a profound difference. It is clear that the BER of ZF V-BLAST is roughly 9.83 × 10−2, when the bandwidth is 6 kHz. Nevertheless, that of ZF V-BLAST is about 1.78 × 10−3, when the bandwidth is 3 kHz. When the SNR is 14 dB, the BER of our algorithm under the bandwidth 3 kHz is 10−5, and that of ZF V-BLAST under the bandwidth 6 kB is 10−2. Overall, the BER of ZF V-BLAST is the highest when the bandwidth is 6 kHz, while that of our algorithm is lowest when the bandwidth is 3 kHz.
The comparison of energy consumption of the four algorithms
Hydroacoustic nodes usually use disposable batteries for energy supply; therefore, the energy consumption is an important indicator to measure the survival time. In UANs, the energy-saving mechanism is usually designed in the media access control (MAC) layer. The main measurement includes the total energy consumption of the network, the transmission and reception energy waste due to data conflicts. We defined an energy consumption model, which is expressed in equation (30)

where

where
In this article, the SE-MAC protocol 28 is used in the MAC layer, which introduces a mechanism of the channel adaptive ACK, that is, the CA-ACK. According to the channel situation, the No-ACK or Imm-ACK 29 is automatically selected and the number of ACK frames is reduced. Taking into account actual requirements, the energy consumption of acoustic devices from different manufacturers is completely different during the data transmission, reception, sleep, and idle. In this article, we set eight nodes in a single-cluster environment, and all nodes achieve one-hop communication with each other. The initial energy of each node is 2500 J. The transmitting power is 0.2 W, the receiving power is 0.15 W, the idle power is 0.07 W, and the sleep power is 0.0l W.
We compare the survival time of the four algorithms, as shown in Figure 8. It is clear that, in the 10th iteration, the residual energy of ZF V-BLAST is 15,453 J, that of MMSE V-BLAST is 13,699 J, the proposed algorithm is 12,659 J, and ML V-BLAST is 9779 J. Therefore, the energy consumption accounts for 23%, 32%, 37%, and 51% of the whole network, respectively.

The comparison of energy consumption.
The energy is exhausted, when the iteration reaches 40, 50, 71, and 79 for ML V-BLAST, our algorithm, MMSE V-BLAST, and ZF V-BLAST, respectively. It is obvious that the energy consumption of our algorithm is greater than that of MMSE V-BLAST, but lower than that of ML V-BLAST.
The experiments show that the survival time of ZF V-BLAST is relatively long. The energy consumption of the network is increased by 21% and 15% for ZF V-BLAST and MMSE V-BLAST algorithms, respectively. Compared with ML V-BLAST algorithm, the energy saving is about 37%.
The comparison of the processing delay of the four algorithms
We compare the processing delay of the four algorithms by sending packets of different sizes. Experimental results demonstrate that when the data packet is small, the processing delay of the four algorithms is basically the same, but as the packet size increases, the processing delay of the four algorithms shows an exponential increase.
As shown in Figure 9, when the packet size is less than 256 bits, the processing delay of the four algorithms is basically the same. When the size is increased to 512 bits, the processing delay of ZF V-BLAST is 217 ms, and that of MMSE V-BLAST and the proposed algorithm still tends to be the same, about 101.2 ms. However, the delay of ML V-BLAST is the smallest, about 78.5 ms. When the maximum size of packets is 4096 bits, the processing delay of ZF V-BLAST is 980 ms, that of the ML V-BLAST is 420 ms, and MMSE V-BLAST is 630 ms. Nevertheless, that of the proposed algorithm is just 258 ms, which means that the processing delay of our algorithm is greatly reduced. It is due to the LDLH decomposition method for solving the unitary matrix, which can quickly reduce dimensions of the signal matrix; therefore, the processing delay is decreased greatly.

The comparison of the processing delay.
Comparing with our algorithm, the processing delay of ZF V-BLAST has increased by 68.4%, that of MMSE V-BLAST is 52.3%, and ML V-BLAST is 31.6%.
The complexity comparison of the four algorithms
The complexity of a detection algorithm directly affects the survival time of the UAN. The high complexity will lead to the rapid energy exhaustion of nodes. However, there are higher requirements on the hardware. In an MIMO V-BLAST system, the complexity is usually weighed in the computation of multipliers and adders based on the converted floating points. To quantify complexity, we define a complex multiplication as six FLOPs (floating-point operations per second) and a complex addition as two FLOPs. 21
In ZF V-BLAST, it needs to calculate the pseudo-inverse matrix, in which multipliers and adders are the main factors of the complexity. For an MIMO system of
Let
When the order r of Q is large enough, a multiplication operation which requires to perform LDLH decomposition is

The comparison of complexity.
Among them, the complexity of ML V-BLAST is the highest, while that of ZF V-BLAST is the lowest. We also see that the complexity of our algorithm is slightly higher than that of MMSE V-BLAST. It is clear that the proposed algorithm reduces the complexity of ML V-BLAST, but maintains the performance of ML V-BLAST. Consequently, it achieves a trade-off between complexity and performance.
Conclusion
In this article, we propose a novel signal detection algorithm of MIMO V-BLAST system. We resolve the unitary matrix of underwater channels based on LDLH decomposition and order the detection sequence by the permutation matrix. Followed by, we detail the implementation of interference cancelation and slice processing. Finally, we conduct experiments, which listed as follows. First, we execute the BER comparison under different number of antennas. The experiments demonstrate that, as antennas increase, the BER of our algorithm and ML V-BLAST decreases greatly, while that of ZF V-BLAST and MMSE V-BLAST does not change distinctly. Second, we conduct the BER comparison under massive MIMO systems with 16, 32, and 64 antennas, respectively. The results show that the BER of our algorithm is slightly higher than that of ML V-BLAST. Third, we carry out the comparison of energy consumption and the processing delay. The results show that the energy consumption of our algorithm is greater than that of MMSE V-BLAST, but lower than that of ML V-BLAST. And for the processing delay, it shows that our algorithm is significantly reduced. However, that of ML V-BLAST is least. Fourth, we perform the BER comparison under different bandwidth conditions. The results show that the BER of our algorithm is close to that of ML V-BLAST under the same bandwidth. Finally, we do the complexity comparison of the four algorithms. Simulation shows that our algorithm reduces the complexity of ML V-BLAST algorithm, but maintains the performance near to that of ML V-BLAST. The experiments indicate that a trade-off between performance and complexity is achieved. However, cooperative communication of UANs will be built between long distance, and the design of the underwater node based on MIMO V-BLAST is the main task we are currently working on.
Footnotes
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Science Foundation of China (grant no. 61502149); in part, by the Young Scholar Training Program of Higher Education in Henan Province (grant no. 2019GGJS172); and in part, by the Key Scientific Research Projects of Colleges and Universities in Henan Province (grant nos 20A520002, 21A520014, and 21A520015).