
Abstract
The trajectory tracking control strategy for intelligent vehicle is proposed in this article. Considering the parameters perturbations and external disturbances of the vehicle system, based on the vehicle dynamics and the preview follower theory, the lateral preview deviation dynamics model of the vehicle system is established which uses lateral preview position deviation, lateral preview velocity deviation, lateral preview attitude angle deviation, and lateral preview attitude angle velocity deviation as the tracking state variables. For this uncertain system, the adaptive sliding mode control algorithm is adopted to design the preview controller to eliminate the effects of uncertainties and realize high accuracy of the target trajectory tracking. According to the real-time deviations of lateral position and lateral attitude angle, the feedback controller is designed based on the fuzzy control algorithm. For improving the adaptability to the multiple dynamic states, the extension theory is introduced to design the coordination controller to adjusting the control proportions of the preview controller and the feedback controller to the front wheel steering angle. Simulation results verify the adaptability, robustness, accuracy of the control strategy under which the intelligent vehicle has good handling stability.
Keywords
Introduction
Traffic congestion, frequent accidents, environmental pollution, and energy waste become more and more serious with the swift growth of traffic volume and vehicle ownership. The traditional vehicle needs a driver to drive it. Due to the differences of the drivers’ driving skill, 1 physical and mental condition, personality, gender, and so on, the driver’s personal factors are the main cause of traffic accidents. Intelligent vehicle can make people get rid of the “driver–vehicle–road” closed-loop traffic control system, and form “vehicle–road” closed-loop traffic control system to eliminate the influence of the personal factor differences of drivers. In the same traffic environment, the intelligent vehicle can be driven safely, efficiently, and legally with optimal driving strategies and driving techniques, thereby can greatly improve the efficiency of the transportation system, significantly reduce the traffic accident rate, and also can reduce the energy consumption and the exhaust emissions. The key technologies of intelligent vehicle 2 include the environmental perception,3,4 the behavioral decision, 5 the path planning, and the motion control. The motion control technology is the basis of other key technologies. The trajectory tracking is a basic functional, but is vital to ensure that the intelligent vehicle tracks the target trajectory safely and accurately.
The vehicle needs to travel along the target trajectory on a certain width road, so the trajectory tracking control must be highly accurate. The driver determines the appropriate steering wheel angle to control the vehicle to track the target trajectory based on the preview deviation, which is obtained through previewing the trajectory in a certain distance. So, the single-point preview follower theories and multi-point preview follower theories are proposed by CC MacAdam,6,7 K-H Guo,8,9 RS Sharp and colleagues10,11 successively. Due to the characteristics of intelligent vehicle operation and execution, the preview follower theories have been widely applied in trajectory tracking control.12–19
The vehicle dynamics model is the basis of the trajectory tracking control of intelligent vehicle. The vehicle dynamics factors determine performances of the target trajectory tracking which can be improved through comprehensively considering of the vehicle dynamics factors and combining with the advanced and/or fused control algorithms.20–25 However, the parameter perturbations 26 and the external perturbations of the vehicle during driving are not considered in these papers. They are the important factors to further improve the tracking control performance.
Some control algorithms with strong robustness and adaptivity are used for these factors on the current research, such as the backstepping control algorithm, the sliding mode control (SMC) algorithm, the H-infinity algorithm, the optimization algorithm, and so on. Considering the parameters uncertainties of the tire–road friction coefficient and the lateral tire stiffness, and the presence of external perturbations, an attitude controller of vehicle is designed based on the lateral dynamic model to track the trajectory. 27 In view of the tire forces saturations, system uncertainties, and the variation of the desired-path curvature, a composite nonlinear feedback control algorithm based on the integral sliding mode is proposed. 28 Considering influence of the tire friction physical limits and the external disturbance on driving conditions, a robust steering controller is designed by the backstepping variable structure control algorithm. 29 The active disturbance rejection control is applied to the steering controller to estimate the uncertainties and the external disturbances in real time and compensate them actively. 30 In view of vehicle nominal cornering stiffness, road–tire adhesion coefficient, inertial parameters, and forward speed, a robust adaptive indirect control method is proposed based on an exponential-like-sliding-mode fuzzy type-2 neural network approach to enhance tracking performance. 31 An adaptive multivariable super-twisting control strategy is proposed to deal with the multiple unknown and mismatched disturbances problem of the steering system. 32 A steering controller based on fuzzy-adaptive preview time for the robust SMC is proposed according to the curvature change and the lateral acceleration of vehicle. 33 A hierarchical lateral control scheme is proposed, where the upper controller is designed by the linear quadratic regulator algorithm based on robust H-infinity to compensate the sensor-induced delays. 34 In view of parametric uncertainties, external disturbances, and over-actuated features, an adaptive hierarchical control framework is proposed which applies an adaptive sliding mode high-level control law to produce a vector of front steering angle and external yaw moment.35,36 The learning algorithm is also applied to the motion control gradually.37–39 In terms of the problem of model error and tracking dependence, an intelligent vehicle model transfer trajectory planning method is proposed based on the deep reinforcement learning to obtain the effective the control action and trajectory sequences. 40
In the papers mentioned above, the adaptability of the control system to parametric uncertainties and external disturbances is improved through the control algorithms with strong robustness. The vehicle is a highly nonlinear, time-varying, intensive coupling, uncertain, and complex system with time lag. So, it is difficult to establish an accurate vehicle dynamics model. The majority of the papers just take into account a part of dynamics characteristics and uncertainties. Moreover, the dynamic state of intelligent vehicle is changing as the target trajectory, front wheel steering angle, and velocity. Intelligent vehicle may travel in the various dynamic states which lead to the differences of accuracy, handling stability, and so on. Especially, the trajectory curvature which changes a lot will cause some potential hazards. The circumstances of vehicle traveling cannot be fully listed as far as we know, and the control strategies for them cannot be designed correspondingly. So, the extensive adaptive trajectory tracking control method and strategy should be investigated to ensure not only the accuracy of trajectory tracking but also the robustness and adaptability to uncertainties and dynamic states.
Considering the uncertainties and various dynamic state, this article researches a novel robust adaptive trajectory tracking control strategy. The main contributions are summarized as follows: the lateral preview deviation dynamics model of the vehicle system is established involving the parameters perturbations and external disturbances of the system; according to the tracking state variables, the preview control method based on the adaptive sliding mode control (ASMC) algorithm is proposed to realize strong robustness and adaptability of the trajectory tracking control to uncertainties; the coordination control method is proposed to adjust the proportions of the preview controller and the feedback controller to the front wheel steering angle in order to improve the adaptability to multiple dynamic states.
This article is organized as follows. In section “Trajectory tracking control strategy,” the trajectory tracking control strategy is constructed. The lateral preview deviation dynamics model of the vehicle is established and the preview controller is presented based on the ASMC algorithm in section “Preview controller.” In section “Feedback controller,” the feedback controller is designed using the fuzzy control algorithm. In section “Coordination controller,” the coordination controller is proposed using the extension theory. Simulation studies are provided in section “Simulation results,” where the simulation results are presented and analyzed. Conclusions are presented in section “Conclusion.”
Trajectory tracking control strategy
According to the preview information and the feedback information obtained through the environmental perception system, the trajectory tracking is realized by the hierarchical trajectory tracking control strategy in this article. It consists of a preview control layer, a feedback control layer, and a coordination control layer, as shown in Figure 1. Based on the simplified lateral dynamics model of vehicle, the preview control layer introduces the uncertain factors to establish the lateral preview deviation dynamics model, and uses the ASMC algorithm to design the preview controller to track the target trajectory. In the feedback control layer, the fuzzy control algorithm is adopted to design the feedback controller to eliminate the real-time tracking deviation. The coordination control layer coordinates the control proportions of the preview controller and the feedback controller, and finally outputs the front wheel steering angle to control the vehicle lateral motion.

Schematic of the trajectory tracking control strategy.
Preview controller
Preview control model
Considering that the single-point preview follower theory can meet the accuracy requirement of the trajectory tracking and its calculation amount is small, the single-point preview follower theory is adopted in this article. The preview distance is usually described by the preview time, and should be adjusted in accordance with the vehicle velocity to ensure the accuracy and stability during preview following the target trajectory. To avoid that the preview controller works too frequently or too slowly, the function of the single-point preview distance with vehicle velocity and preview time as variables is designed as follows

where
The vehicle mass center is acted as the reference point of vehicle motion. On the condition that the real-time position and attitude angle

Principle of the single-point preview control.
The influence of time lag

where
The intelligent vehicle is an uncertain system because various uncertain factors such as the system’s parameters changes, external disturbances, sensor errors, time lag changes, and so on can affect the control results. In this article, the uncertainties in the traveling process are comprehensively considered. That is, the lateral preview deviation dynamics model is transformed into an uncertain system with the parameters perturbations and external disturbances which are assumed as the continuous matrix functions. Finally, the lateral preview deviation dynamics model is rewritten as

where
Preview control method
Since the sliding mode motion has no relations with the parameters and the disturbance of the system, the SMC algorithm has strong robust performance to the unmodeled dynamics, parameter perturbation, and external disturbance of the controlled object. Therefore, the lateral preview deviation dynamics model is used as the controlled system, and the ASMC algorithm is adopted to design the preview controller to realize the preview trajectory tracking in this article.
The lateral preview deviation dynamics system is an uncertain system with parameter perturbations and external disturbances, as shown as formula (4)

where
Using the method of nonsingular linear transformation, the uncertain matrixes are projected into the matched space and the mismatched space. According to the equation of the lateral preview deviation dynamic system, the matrix


where equations (5) and (6) are the two subsystems projected into the mismatched space and the matched space, respectively. For the subsystem in the mismatched space (equation (5)), uncertain matrixes
The switching function
In this article, the switching function is designed in accordance with the mismatched uncertainties and the matched uncertainties of the system. Since the nominal form of the lateral preview deviation dynamic system is a linear system,

where
Because the subsystem (equation (5)) is not directly related to the variable

where

where
The control function
The switching method is used to design the SMC function. The control function consists of an equivalent control function

After nonsingular linear transformation, the switching function of the lateral preview deviation dynamics system is expressed as

where
The equivalent control function is designed without considering parameter uncertainties and external disturbances. The switching control function is used to eliminate parameter perturbations and external disturbances. The external disturbances of the lateral preview deviation dynamic system have not been considered in the analysis of the subsystem (equation (5)). The external disturbance matrix
Assumption 1
There are positive constants

According to the reachable condition of the sliding mode surface, the Lyapunov function is constructed as shown as formula (13)

The derivative of

Finally, the equivalent control function and the switching control function can be expressed as


where
The control function

Inequality (equation (17)) shows that the control function
Feedback controller
The preview control belongs to the feedforward control. It is used to eliminate the position and attitude deviations at the preview point, but it can’t completely eliminate the real-time deviations of position and attitude between the vehicle and the target trajectory. Therefore, the feedback controller is needed as a supplement to the preview controller.
The article seeks the two points of the target trajectory which are nearest to the intelligent vehicle. Then, a line is used to connect the two points. The position and attitude angle deviations between this line and the vehicle are used as the feedback information. The trajectory tracking deviation feedback principle is shown in Figure 3. The vehicle position and attitude angle at the mass center


where

Trajectory tracking deviation feedback principle.
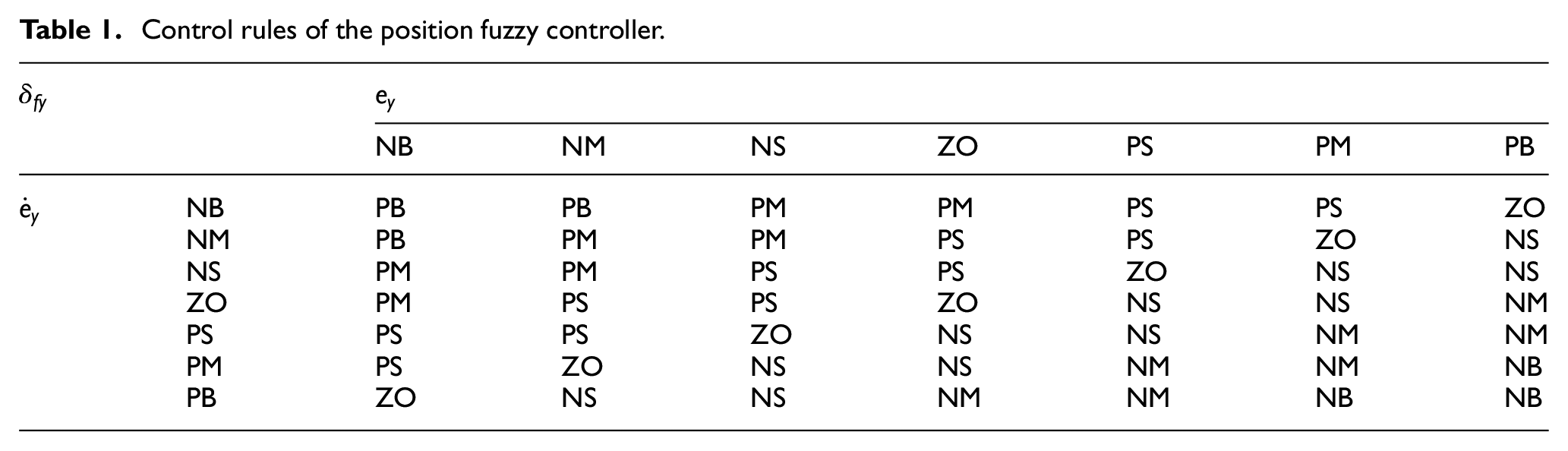
The feedback controller is mainly made of the position fuzzy controller and the attitude fuzzy controller. The control principle is shown in Figure 4.

Control principle of the feedback controller.
The abscissa values of points on the target trajectory are set to be 0. According to the lane width in the road, the discourse domains of
Control rules of the position fuzzy controller.
Control rules of the attitude fuzzy controller.

Then, the barycenter method is used to defuzzy to obtain the control variable

Coordination controller
The preview controller is used to eliminate the deviation of the preview position and attitude. The feedback controller is used to eliminate the deviation of the real-time position and attitude. However, the dynamic state is time-variable as vehicle traveling, such as the stable state, the extreme state, the unstable state, and so on, which may cause the large real-time position deviations, real-time attitude deviations, and/or lateral motion to make vehicle dangerous. So, the accuracy, handling stability, safety of trajectory tracking need to improve. The extension theory is adopted to design the coordination controller to adjust the preview controller and feedback controller to improve these performances. The yaw rate
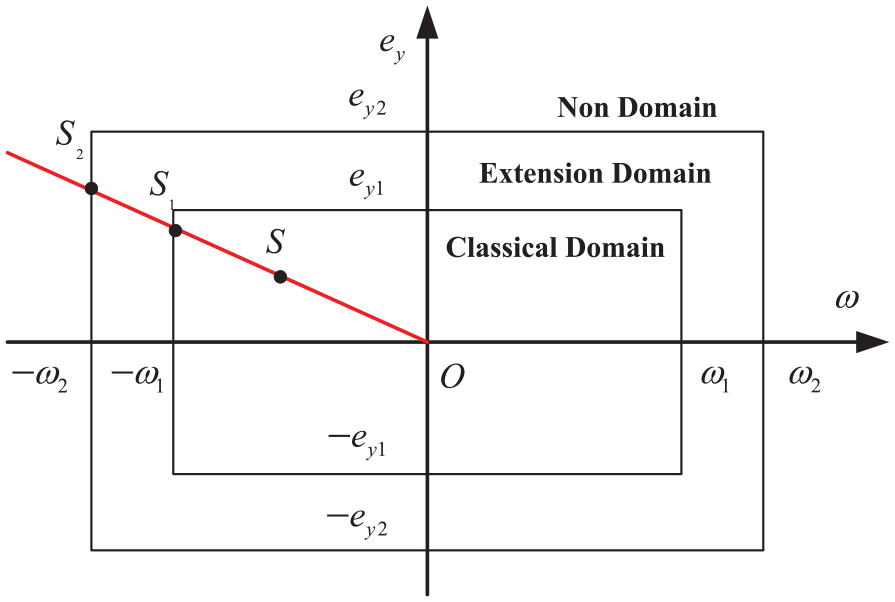
Two-dimensional extension set.
Domain boundary
The relation curves of the lateral forces and the sideslip angles of the tire are linear in the condition that the lateral force is smaller than

The
The relationship between the road adhesion coefficient

where
As the sideslip angle of mass center and its differential value are very small, the contribute ratio of the second and third parts is generally set to 15% to the overall lateral acceleration. Therefore, the upper limit of the yaw rate on the extreme state is shown in equation (23)

This upper limit of the yaw rate is used as extension domain boundary
Correlation degree and measure mode
In the characteristic plane

According to the correlation degree function, when
Coordination of the control proportions
The correlation degree function is used to calculate

Simulation results
In this section, two simulation tests which are the straight trajectory tracking test and the double lane change test are investigated to verify the effectiveness of the proposed control method and control strategy. The uncertainties of the lateral preview deviation dynamics model of the vehicle system are set as follows: the perturbations of the tire cornering stiffnesses are set to
Straight trajectory tracking test
The performance of straight trajectory tracking belongs to the basic traveling performance of intelligent vehicle. By giving the initial lateral position and attitude angle of intelligent vehicle and the straight trajectory, the performance of traveling into and along the straight trajectory of the preview controller is tested. The simulation test conditions are set as follows: the initial position and attitude angle are set to (0, 0, 0); the straight trajectory is
In Figure 6, it can be found that ASMC preview controller without uncertainties has the best tracking accuracy, and it yields the traveling trajectory whose convergence rate is the fastest. For SMC preview controller with uncertainties, the tracking accuracy decreases largely and the convergence rate of the traveling trajectory is slower than that without uncertainties. The tracking accuracy of ASMC preview controller is influenced by uncertainties slightly, and its convergence rates of the traveling trajectories on the two conditions are almost the same. The front wheel steering angle curves of the two preview controllers on the two conditions are shown in Figure 7. Although the maximum angle of SMC preview controller with uncertainties is close to that without uncertainties, the front wheel steering angle curve of the former condition fluctuates significantly in the process of vehicle traveling into the straight target trajectory. The maximum angle of ASMC preview controller without uncertainties is 1.48°, and that with uncertainties increases to 3.17°, but the two front wheel steering angle curves are similar and stable.
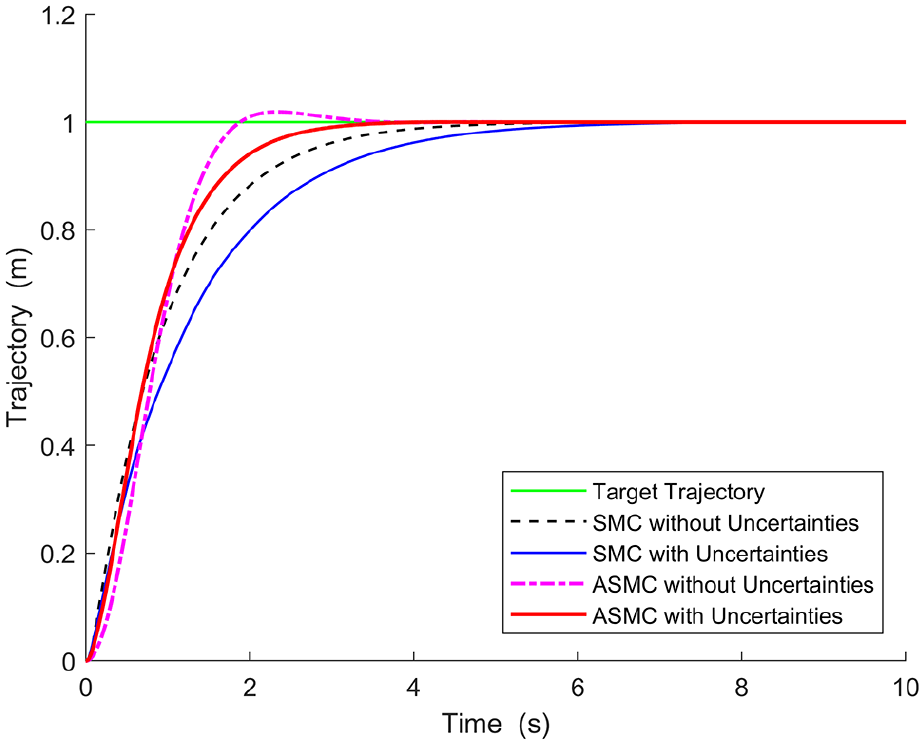
Traveling trajectory.

Front wheel steering angle.
The values of the four state variables which are the lateral preview position deviation, the lateral preview velocity deviation, the lateral preview attitude angle deviation, and the lateral preview attitude angle velocity deviation of the preview controller are shown in Figures 8–11.

Lateral preview position deviation.

Lateral preview velocity deviation.

Lateral preview attitude angle deviation.

Lateral preview attitude angle velocity deviation.
When the dynamics model with uncertainties, the each variable curves of SMC and ASMC preview controllers are both affected by uncertainties. It can be seen from Figure 8 that the curve of the lateral preview position deviation under ASMC preview controller is less affected by the uncertainties than that under SMC preview controller, and converge rapidly to zero. As shown in Figure 9, the variational trends of the lateral preview velocity deviation curves under ASMC preview controllers with uncertainties and without uncertainties are approximately consistent and smooth. As can be seen from Figure 10, the uncertainties have a little effect on the curve of the lateral preview attitude angle deviation under ASMC preview controller, but have a great effect on that under SMC preview controllers and cause the fluctuation. In Figure 11, the maximum value of the curve of the lateral preview attitude angle velocity deviation under ASMC preview controller with uncertainties increases, but the trend and the convergence rate of this curve are similar to that without uncertainties. The curve of the lateral preview attitude angle velocity deviation under SMC preview controller with uncertainties fluctuates significantly. The ASMC preview controller makes the state variables curves converge more quickly and stably, so that adjusts vehicle position and attitude to obtain better performance of the straight trajectory tracking.
The yaw rate curves of vehicle are shown in Figure 12. Although the maximum value of the curve under ASMC preview controller with uncertainties is larger than that without uncertainties, it is lower than those under SMC preview controllers with and without uncertainties. And the curves under ASMC preview controller are more stable and smoother. There is a large oscillation of the curve under SMC preview controller with uncertainties. So, the handling stability under ASMC preview controller is finer than that under SMC preview controller.

Yaw rate.
The results of the simulation test verify that ASMC preview controller has strong adaptivity and robustness, and can make intelligent vehicle accurately, rapidly, and stably travel into and along the straight target trajectory and have good handling stability.
Double lane change test
In the process of double lane change test, the dynamic state of intelligent vehicle alternates between stable state, extreme state, and unstable state. It is investigated for the verifications of adaptability of the proposed control strategy. In this simulation test, the intelligent vehicle travels at high velocity of 25 m/s. The simulation results are shown in Figures 13–17.

Traveling trajectory.
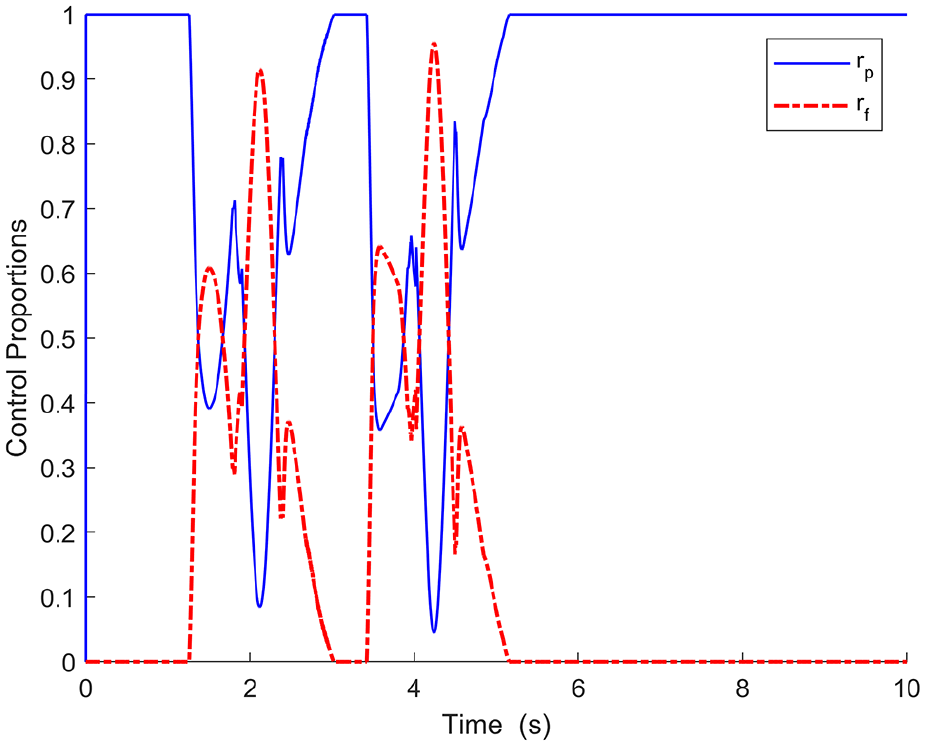
Control proportions.

Front wheel steering angle.
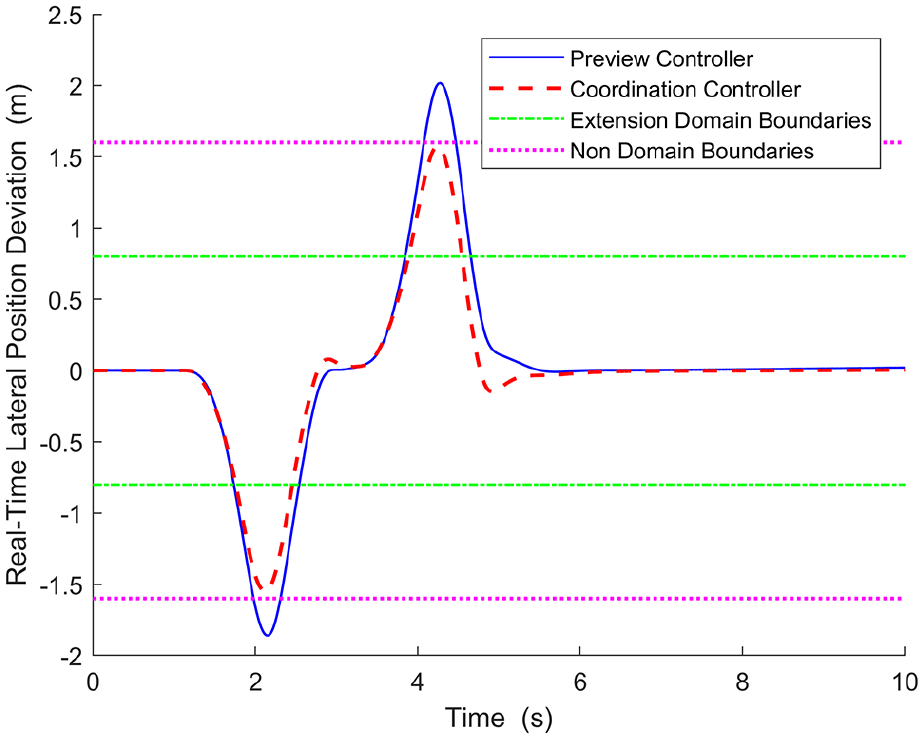
Real-time lateral position deviation.

Yaw rate.
From the results in Figure 13, the preview controller and the coordination controller which embodies the proposed control strategy both well complete the double lane change test. And the vehicle under the proposed control strategy has better tracking accuracy. According to the vehicle state, the proposed control strategy adjusts the control proportions of the preview controller and the feedback controller through the coordination controller. In Figure 14, the control proportions under the coordination controller present that the preview controller is the main and the feedback controller is the auxiliary which works when the real-time lateral position deviation or/and the yaw rate beyond the classical domain. The front wheel steering angles are shown in Figure 15. In comparison with the preview controller, the front wheel steering angle curve under the proposed control strategy appears large changes when the vehicle is in the extreme state and the unstable state, where the control proportion of the feedback controller increases and that of the preview controller decreases to adjust vehicle state as shown in Figure 14.
Given that the vehicle should travel along the trajectory of double lane change test, there must be large real-time lateral position deviation and large yaw rate. In the light of the domain boundaries, the dynamic state of the vehicle is transferring between the stable state, the extreme state, and the unstable state under the preview controller. But through the proposed control strategy, the vehicle doesn’t undergo the unstable state, and the real-time lateral position deviation and the yaw rate decrease dramatically. Compared with the preview controller, the maximum value of the real-time lateral position deviation on the right reduces 0.32 m, and that on the left reduces 0.44 m in Figure 16. Under the proposed control strategy, the maximum values of the yaw rate decline 9.94°/s on the right and 13.19°/s on the left in Figure 17.
It clearly found that the proposed control strategy can effectively improve handling stability and tracking accuracy in tracking process. It has strong adaptivity to multiple dynamic states.
Conclusion
The article investigates the adaptive trajectory tracking control strategy for intelligent vehicle. Considering the parameters perturbations and external disturbances of the vehicle system, according to the tracking state variables, the preview control method based on the ASMC algorithm is proposed to realize the accuracy, robustness, and adaptability of trajectory tracking. The feedback control method is designed based on the fuzzy control algorithm to reduce the real-time tracking deviation. In order to further improve the accuracy and handling stability of trajectory tracking on the multiple dynamic states, the coordination control method is proposed to adjust the preview controller and the feedback controller to enhance adaptability to multiple dynamic states. The simulation results of the straight trajectory tracking test and the double lane change test show that the proposed control strategy has strong adaptivity and robustness to the uncertainties, has strong adaptivity to multiple dynamic states, can make intelligent vehicle accurately, rapidly, and stably travel along the target trajectory and have good handling stability.
In this article, we assume that the intelligent vehicle travels at uniform velocity. But the actual velocity of intelligent vehicle is controllable and variable. The variable velocity isn’t considered in the proposed control strategy. In the future, we intend to introduce the velocity control to improve the trajectory tracking control strategy, which can further enhance the adaptability to the dynamic states during trajectory tracking through the coupling control of the lateral and longitudinal motions.
Footnotes
Appendix 1
Handling Editor: Xi (Vincent) Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the financial support from the National Key R&D Program of China (Grant No. 2017YFC0803904 and Grant No. 2018YFB1600701), the China Postdoctoral Science Foundation (Grant No. 2017M613034), the Postdoctoral Science Foundation of Shaanxi Province (Grant No. 2017BSHEDZZ36), the Shaanxi Province Industrial Innovation Chain Project (Grant No. 2018ZDCXL-GY-05-03-01), the Shaanxi Provincial Key Research and Development Plan Project (Grant No. 2018ZDXM-GY-082), the Shaanxi Innovative Talents Promotion Plan—Youth Science and Technology Star Project (Grant No. 2018KJXX-005), and Natural Science Basic Research Program of Shaanxi (2020JQ-364).