
Abstract
The Internet of vehicles is an essential component for building smart cities that can improve traffic safety and provide multimedia entertainment services. The cognitive radio–enabled Internet of vehicles was proposed to resolve the conflict between the increasing demand of Internet of vehicles applications and the limited spectrum resources. The multi-hop transmission is one of the most important issues in cognitive radio–enabled Internet of vehicles networks. Nevertheless, most existing forwarding solutions designed for the cognitive radio–enabled Internet of vehicles did not consider the urban expressway scenario, where primary base stations are densely installed with small coverage areas. In this case, it is difficult to ensure that the sender and the receiver of the same cognitive radio link have similar channel availability statistics, which makes cognitive radio links more likely to be interrupted. To address this challenge, we develop a multi-hop forwarding scheme to minimize the end-to-end delay for such networks. We first formulate the delay minimization problem as a non-linear integer optimization problem. Then, we propose an approach to select the relay candidates by jointly considering the high mobility of vehicles and the unique cognitive radio spectrum usage distributions in urban expressway scenarios. Finally, we propose the low-latency forwarding strategies by considering the channel availability and the delay cost of different situations of relay candidates. Simulations show the advantages of our proposed scheme, compared with state-of-art methods.
Introduction
The Internet of things (IoT) is a novel communication paradigm that connects physical objects in the world to the Internet. Nowadays, the IoT is widely applied in our social life, such as smart cities, environment monitoring, and health care. 1 The intelligent transportation system (ITS) is an essential component for building smart cities. The Internet of vehicles (IoV) enables the vehicle-to-vehicle (V2V) communication in the ITS, where the core objective is to control accidents, reduce traffic congestion, and improve driving safety in urban areas, 2 for example, vehicles exchange traffic or accidental information with each other. This objective has the requirement of low-latency data transmission during the V2V communication. 3 Due to the plethora of applications in ITS, the high bandwidth demand to serve the increasing numbers of vehicles may lead to the spectrum scarcity problem in the IoV environment.
Cognitive radio (CR) technology has emerged as a potential technology to solve the spectrum scarcity problem, and it can improve the spectrum utilization efficiency in IoV networks. In CR-enabled IoV (also called cognitive IoV), the vehicle that equips with CR spectrum sensing terminals can be seen as an unlicensed user/secondary user (SU). Based on the CR-enabled roadside unit (RSU), SU can share the wireless channel along with the licensed user/primary user (PU) in an opportunistic manner. PUs will get the first priority surely, and SUs are allowed to utilize the licensed bands whenever they would not cause any interference to the PUs resulting in high spectrum utilization.
4
When these SUs (vehicles) access the same spectrum holes or white spaces in the licensed spectrum bands, they can communicate with each other. Figure 1 gives an example of V2V communication in cognitive IoV.

V2V communication in cognitive IoV.
Data transmission in multi-hop cognitive IoV is an important issue that affects the performance of the entire networks. Different from the traditional IoV or CR networks, forwarding in cognitive IoV has to consider the spatiotemporal variations of CR channels and high mobilities of vehicles. As vehicles move fast on roads, the spectrum sensing and handoff time may cause the channel state decision out-of-date with a certain probability. The communication links between two neighboring vehicles may be frequently interrupted by PUs’ recurrences. Thus, CR introduces great challenges for the forwarding scheme design in IoV networks. 5
In this article, we propose a low-latency forwarding scheme for cognitive IoV networks, by considering the special CR spectrum characteristics of urban expressway scenarios in an efficient approach. The rest of this article is organized as follows. The section “Motivation and contribution” specifies motivations and contributions of our work. The section “Related work” presents a concise review of existing related work. The section “System model and problem statement” describes the system model. The section “Relay candidate selection” evaluates the metrics to select relay candidates. The section “Low-latency forwarding scheme” proposes the urban expressway forwarding scheme (UEFS) in detail. Simulation results are presented in the section “Performance evaluation and analysis.” The final section is “Conclusion.”
Motivation and contribution
Motivation
Although some excellent works have been done to address the routing problem in the cognitive IoV,6–8 the minimum delay routing problem for the urban expressway environment is not mentioned in such a network. In the urban expressway scenario, some key features should be considered for the cognitive IoV. First, the speed of SUs (vehicles) on the urban expressway is faster than the non-expressway, which includes all types of roads with intersections and traffic lights for pedestrians. Second, two neighboring SU nodes may lie in different primary base station (BS) coverage areas with different channel usage patterns in the urban expressway cognitive IoV. Due to the high mobility of vehicles and the special CR spectrum usage distributions, existing delay-aware routing schemes are not suitable for the urban expressway scenario. Specifically, the motivation behind our work is based on the following observations.
First, in the urban expressway cognitive IoV, channel switching does occur and happens more frequently than the non-expressway scenario, which increases the channel switching delay significantly. Moreover, if two neighboring SUs do not have at least one available common channel, they have to wait for the channel to become available again or take extra costs to find alternative paths, which intrudes additional channel queuing (waiting) time. Most system models of existing delay-aware routing works only consider the transmission delay and the propagation delay, and they are not suitable for the urban expressway cognitive IoV. Therefore, a novel system model with an accurate delay estimation method is required for the urban expressway scenario, which considers additional delay factors like the channel switching delay and the queuing delay.
Second, a strict principle in cognitive IoV is that a link exists between two SUs if they are in each other’s communication range and share at least one commonly available channel. If the transmission has been established, as the sender and the receiver move fast and are with different velocities, two cases may happen and produce different types of delays for the next time period. One case is that they cannot operate in any commonly available channel for transmission. The other case is that one node moves out of the transmission range of another node. Thus, a multi-metric candidate set selection approach is required, which considers both the CR channel availabilities and the contact durations between two neighboring SUs.
Third, in the urban expressway cognitive IoV, two end nodes of the link may be covered by one BS’s coverage or different BSs’ coverage areas. Due to the inconsistent nature of the mobility speed and the channel availability of different SUs, the transmission links have heterogeneous characteristics with distinct transmission modes. However, existing solutions try to design a unified routing scheme and ignore the unique features of different transmission modes. In specific transmission modes, some complicated calculation steps of the unified scheme are not required, and thus, the computing cost can be further reduced. Moreover, most schemes choose a neighboring SU node that is the closest to the destination and with a minimum transmission delay as the optimal next-hop. Indeed, these schemes can achieve the minimum end-to-end delay for one transmission mode that two end SUs of the link are covered by one BS’s coverage. However, considering the urban expressway scenario, if the sender and the receiver are covered by different BSs’ coverage areas, these schemes cannot reach the minimum value or become unviable because it cannot guarantee that the sender and the receiver have similar channel availability statistics.
The above considerations motivate us to consider different transmission modes for the urban expressway scenario and design multiple forwarding strategies separately, considering the heterogeneous characteristics of the transmission links in cognitive IoV.
Contribution
The main contributions of this article include three parts:
We design a system model to study the delay characteristics in the urban expressway cognitive IoV, including the propagation delay, the transmission delay, the channel switching delay, and the queueing delay. We formulate the minimum end-to-end delay problem as a non-linear integer programming problem.
We evaluate the availability of relay candidates by two metrics. One metric is the CR channel availability, which is the idle time slot of available CR channels in adjacent primary BSs located along the urban expressway. The other metric is the contact duration between SUs, which indicates the reliability of the link between two SUs.
We separate the relay candidate set into two subsets based on the discrepancy between road segments. The relaying behaviors between two neighboring nodes are classified into three different transmission modes. We propose three forwarding strategies and analyze the end-to-end delay for these three modes. Specifically, one significant point of our contributions is considering the statuses of CR channel availabilities, which are denoted by two parameters
Related work
Forwarding schemes in IoV
From a theoretical study perspective, several studies on the multicast routing protocol, video transmission, and social-aware data dissemination in the IoV scenario were undertaken recently.
L Zhang et al. 9 present a multicast data delivery scheme with random-delay lowest-cost constraint to transfer service messages on service channels. They propose a priority-aware congestion control scheme by considering differentiated priorities of beacon messages on the control channel, to cope with the congestion at the bottleneck vehicle node. M Ali et al. 10 propose a dissemination scheme for delivering emergency messages in IoV, based on clustering and position-based broadcast techniques. They cluster vehicles to cope with the broadcast storm and utilize the position-based technique to reduce communication delays. D Tian et al. 11 propose a multi-hop routing protocol for video transmission in IoV. They design a packet generation method for the cellular attractor selection and use an order preference to construct the candidate set for the next-hop selection. C Huang et al. 12 propose a member-centric routing protocol to have cooperative video streaming services for the platoon of IoV. They consider a severalty strategy and a merged strategy to disseminate data from the multiple sources to the single destination. F Lyu et al. 13 propose a context-aware IoV paradigm design to enhance the V2V communication performance. They investigate the impacts of different contextual information and utilize the high-level contextual information in their design. T Qiu et al. 14 present a scheme that incorporates a community-aware mechanism to propagate data packets in IoV. In their scheme, they search usable smart-phones based on a community-aware mechanism and determine a contact list of vehicles for the long-distance transmission. PY Chen et al. 15 propose a global timeout scheme and an anti-packet dissemination scheme for IoV. They provide an efficient end-to-end communication for lossy and lossless data delivery, where control messages are delivered in social-based end-to-end and local-based ad hoc fashions.
Different from these researches, we focus on the CR-enabled IoV. In our forwarding scheme, the data transmission is based on the CR technology, which can alleviate the spectrum scarcity problem and increase spectrum utilization. In the high dynamic network topology of IoV, the available CR spectrum varies continuously based on the activities of PUs and SUs. In this article, we take both the availability of CR channels and the mobility of vehicles into consideration for the relay candidates’ selection.
Forwarding schemes in CR-enabled vehicular networks
Many techniques are proposed for efficient data transmission in CR-enabled vehicular networks, especially in CR vehicular ad hoc networks (CR-VANETs), which is an active area of research.
W Kim et al. 16 propose a cognitive VANET architecture that allows vehicle radios finding the least loaded channels. They utilize both geographical locations and sensed channel information to establish reliable and low-delay routes to the destination. J Kim and M Krunz 17 propose a spectrum-aware beaconless geographical routing protocol for CR-VANETs. In their protocol, CR-enabled vehicles dynamically share TV-band channels to improve the relay selection efficiency and decrease the end-to-end delay. H Ghafoor and I Koo 18 propose a spectrum-aware geographic routing protocol to decrease the end-to-end delay in CR-VANETs. They employ the Kalman filter to predict the positions of all moving vehicles and reduce the delay of the network. MK Priya et al. 19 propose a spectrum and traffic-aware routing protocol to improve network efficiency. They utilize a cooperative method to collect information and to sense the spectrum holes. They measure the road weight and use it to select the relay node. Y He et al. 20 adopt a common framework to enhance the security for both spectrum sensing and data transmission processes in CR-VANETs. They utilize the unified trust management scheme to protect the spectrum sensing process and apply the trust value derived from the unified trust model to enhance the security of the data transmission process. A Priyadharshini and M Sundarambal 21 propose a routing protocol to manage the spectrum allocation that reduces the routing delay and ranks the channel availability from end to end. In their method, the root channel is optimally selected for transmission by using an artificial fish swarm algorithm, while other channels are switched to the disabled state. We also proposed some forwarding schemes for the CR-enabled vehicular networks.22,23 These researches are focused on the non-real-time applications, with the objective of the delivery ratio maximization. The latter one applies the social characteristics of both PUs and SUs to improve the packet delivery ratio and the overhead ratio.
Different from these schemes, in this article, we focus on the urban expressway scenario for the goal of the end-to-end delay minimization. We build the system model on the characteristics of the urban expressway. Moreover, the channel heterogeneity of the urban expressway is considered in our forwarding approach that is also different from the existing works.
System model and problem statement
System model
A multi-hop V2V communication system for an urban expressway environment is shown in Figure 2. We consider a scenario with an overlay CR network. The primary network consists of a number of cellular BSs and PUs. The transmission range of each primary BS is denoted as

System model of the urban expressway IoV.
We assume that there are
The secondary network consists of
Notation.

CR: cognitive radio.
Problem statement
In the urban expressway cognitive IoV, our objective is to reduce the end-to-end delay of the multi-hop V2V communication in an efficient approach. In this multi-hop forwarding process, the SU first detects the available CR channels and then transmits packets to the one of the potential relay SUs through a selected available channel. This process may produce the propagation delay and the transmission delay. If the currently used CR channel becomes unavailable in the next time slot, the SU will switch to another available CR channel. This results in the channel switching delay. Moreover, if all CR channels are occupied by PUs, and there is no available CR channel for SUs, SUs have to wait until at least on CR channel becomes available. In this case, a queueing delay is taken into consideration.
According to the above discussions, the end-to-end delay is mainly dominated by the propagation delay, the transmission delay, the channel switching delay, and the queueing delay. We denote the end-to-end delay as

where
The propagation delay depends on the idle time duration of the available CR channel that is selected by SUs. We denote

where
The transmission delay depends on the transmission rate. We utilize the expected transmission time (ETT) to estimate the one-hop transmission delay. The transmission delay over the whole route can be given as follows

where
In our system, the CR channel’s switching time depends on the number and frequency bands of traversing flows. 25 The switching time between channels can be expressed as

where

where
The queueing delay is based on the time that SUs wait for CR channels to become available. We denote the

Consequently, from equations (1)–(6), the objective of the end-to-end delay minimization problem can be specifically formulated as follows
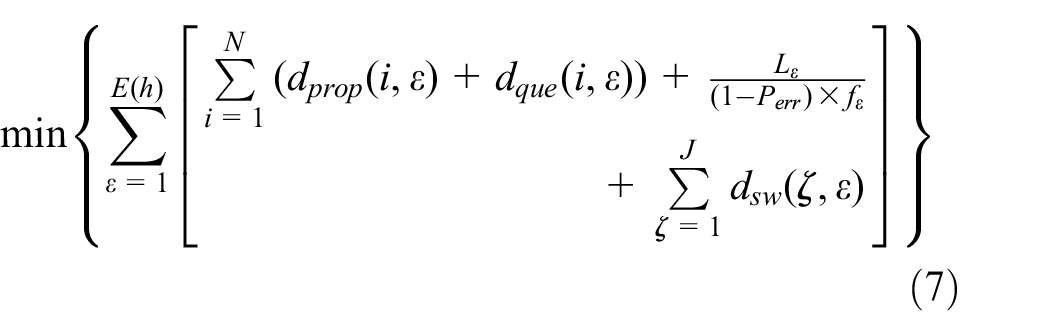




where
In the following sections, we will use the two words “SU” and “vehicle” interchangeably and the same for “packet” and “message.”
Relay candidate selection
In the cognitive IoV, the relay transmission requires not only the available CR channel but also the effective contact with the relay node. In this section, we propose an approach to select relay candidates taking these two metrics into account. First, we predict the CR channel availability and count the idle time slots of available CR channels in the current road segment and the next road segment. Second, we calculate the contact duration between the sender node and its neighbor nodes. Third, combining the consideration of CR channels’ availabilities and contact durations, we obtain the set of relay candidates and separate this set into two subsets based on relays’ different geographical positions on various road segments.
CR channel availability
We utilize the NSHM model to predict the PU activity and deduce the CR channel availability in the continuous time, that is


where
In the system model, we have described that the expressway was divided into


where

Channel time slot statuses in different road segments.
According to equations (14) and (15), we can select the appropriate CR channel for the data transmission between two road segments.
Contact duration between SUs
The link duration between two SUs not only depends on the idle time slots of CR channels but also on the contact duration between two SUs. When
We assume that

where

where both
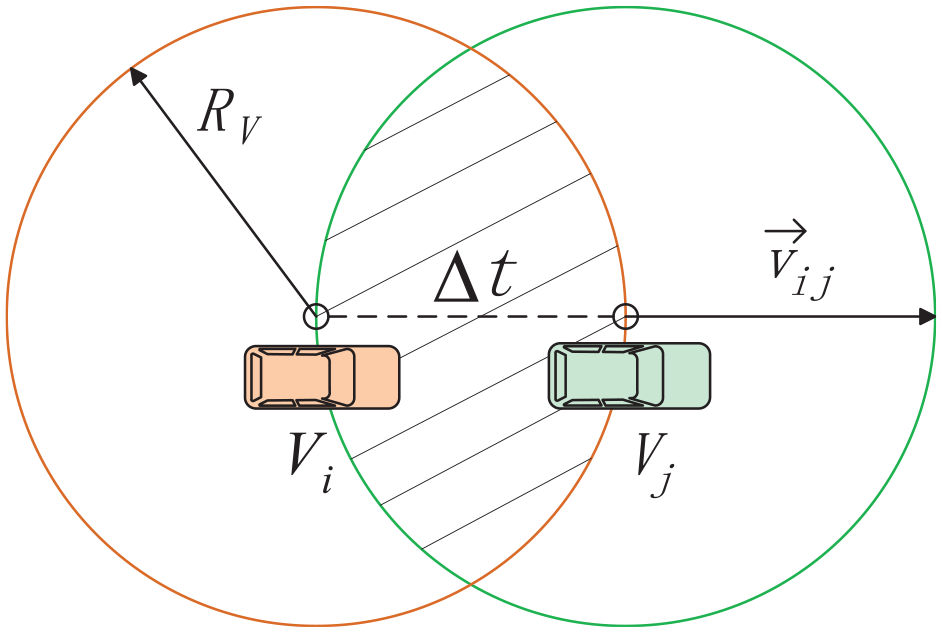
Contact duration between
Relay candidate set
We denote
The relay candidates in
Low-latency forwarding scheme
In this section, according to three different situations of relay candidates in
The forwarding strategy for
and
In this situation, the sender node

where
If the selected relay channel in the current road segment is different from the channel in the last hop, it will generate a switching time

In the subset

where
Thus, the one-hop delay of relaying packets to the nodes in

The forwarding strategy for
,
In this situation, the sender node

In the

Similar to our last forwarding scheme, we still evaluate the channel switch delay as an overhead of the propagation time and adopt the longer time as the actual propagation time that is based on the following computation

In the subset

Thus, the one-hop delay of relaying packets to the nodes in

If there is a common available CR channel between
The forwarding strategy for
,
In this situation, the sender node
Case 1
For the sender node
In this case, the V2V transmission employs the common available CR channel that has the longest idle time duration in the current

where
If the selected relay channel in this road segment is different from the channel in the last hop, it will produce a switching time

Moreover, the bit-reversal operation can calculate busy time slots in

If
The one-hop delay in the

The physical meaning of
Case 2
For the sender node
In this case, vehicles can not transmit the packet over the current
Proposition 1
Given the average queueing time of
Proof
If
According to Proposition 1, we can provide a one-hop relay process with a shorter delay. In case 2, if we choose to relay packets to nodes in
The low-latency forwarding scheme works as follows. Initially, we deduce the CR channel idle time slots in the current road segment and the next road segment. Then, we calculate the contact durations between the sender node and its neighbor nodes. We collect the relay candidates into the set

Novelty analysis of the proposed scheme
In our scheme, some steps include standard CR-enabled IoV networks between vehicles and infrastructure. However, some parts are novel from a low delay and an efficient standpoints, which are described as follows.
Low latency
From a low-delay standpoint, a novel multi-metric-based candidate set selection approach is proposed, which takes both the contact duration and the channel idle state duration into consideration. By using this multi-metric-based method, the probability of links’ disconnection is lower than other solutions. Therefore, the channel switching delay and the queuing delay can be reduced, and the overall end-to-end delay is also decreased.
For most cases in the urban expressway cognitive IoV, our forwarding schemes are based on the geographic routing technique, which selects a neighboring SU node that is the closest to the destination as the next-hop relay. However, this technique cannot work well in a special case when the sender and all the relay candidates cannot access to at least one common available CR channel. We have a novel conclusion for this case, which is stated in Proposition 1 of section “Low-latency forwarding scheme.” It is proved that choosing the relay node, which is not very close to the destination, can be a locally optimal solution from a low-delay standpoint.
Efficiency
From an efficient standpoint, our scheme can reduce the overheads caused by two special cases, which are described as follows. As the sender and the receiver move fast in the urban expressway cognitive IoV, two cases may happen for the next time period. One case is that they cannot operate in any commonly available channel for transmission. In this case, they have to compute another routing path for retransmission and thus introduce the additional computation cost. In addition, more control messages are required to establish new links. The other case is that they have to search for another commonly available channel and switch to the new frequency. In this case, additional control messages are generated for channel switching and channel sensing procedures. Because our solutions can reduce the probability that these cases will happen and aim to reduce the number of channel switching time, they can achieve lower overheads in the urban expressway cognitive IoV.
Existing delay-aware routing techniques attempt to design a unified routing scheme and ignore the unique features of different transmission modes in the urban expressway cognitive IoV. For a specific transmission mode, some complicated calculation steps of the unified scheme are not required, and thus, the computing cost can be further reduced. From an efficient standpoint, we propose different forwarding strategies and end-to-end delay estimation methods for each transmission mode, considering the heterogeneous characteristics of the transmission links in the urban expressway cognitive IoV, which can reduce the computing cost.
Performance evaluation and analysis
Simulation setup
In the simulation, the length of the road is considered as 5 km, and the number of CR channels is five. There are 10 BSs evenly deployed along the road. We consider the transmission range of BSs as 1 km. The vehicles are acted as the SUs, and each SU is equipped with CR-based wireless communication devices. We consider the communication range of the wireless device as 150 m. SUs are distributed on the road with different densities from 10 to 60 SUs/km, which represent the relatively sparse and dense networks. They travel at their constant speeds with the range from 40 to 80 km/h, and their moving does not interact with each other. Each simulation iteration process uses the same movement pattern.
We implement the IEEE 802.11p standard for the vehicular communication scenario. The transmission pattern consists of 512 bytes packets using a constant bit rate (CBR) data bursts of 50 Kbps. The source and destination node pairs are randomly selected for repeated experiments. Simulations were repeated 20 times for each metric and each routing scheme. We adopted the 95% confidence interval for the mean of our simulation results. The simulation parameters are given in Table 2.
Simulation parameters.

CR: cognitive radio; SU: scale-up; MAC: medium access control; IEEE: Institute of Electrical and Electronics Engineers; CBR: constant bit rate.
Evaluation metric and comparison object
To evaluate the performance of our proposed forwarding scheme, we utilize the average end-to-end delay, the average delivery ratio, and the routing overhead ratio as metrics. These metrics can be defined as follows.
Average end-to-end delay. The average time is taken for a packet to be transmitted from the source to the destination.
Average delivery ratio. The ratio of data packets received by the destinations to the packets generated by the sources.
Routing overhead ratio. The ratio of the total packet size of control packets to the total packet size of data packets delivered to the destinations.
We compare our UEFS with six forwarding schemes. We introduced four of them in the related work section. We call them SBGR, 17 Kalman-SGR, 18 MCTRPFS, 21 and SADTR 23 for short, respectively. The other two forwarding schemes are the adaptive quality-of-service-based routing for VANETs (AQRV) 27 and the clustering-based reliable low-latency routing scheme for vehicular networks (CRLLR). 28 AQRV is an adaptive quality-of-service (QoS)-based routing for VANETs. It selects a route that can satisfy the QoS constraints and fulfill the terms of connectivity probability, packet delivery ratio, and delay. CRLLR is a clustering-based reliable low-latency multi-path routing scheme for VANETs. It computes the routes among the communicating vehicles for the improvement of reliability, end-to-end latency, throughput, and energy consumption.
Table 3 shows a comparison between the above six schemes and our proposed scheme. All the schemes involve the objective of end-to-end delay improvement except SADTR, which focuses on the packet delivery ratio and the overhead ratio improvement. All the schemes are built for the CR spectrum scenario, excluding AQRV and CRLLR. SBGR and Kalman-SGR employ the same technique as our proposed UEFS.
Comparison with existing routing schemes.

SBGR: simple self-protected beaconless geographic routing; AQRV: adaptive quality-of-service-based routing for VANETs; CRLLR: clustering-based reliable low-latency routing; SADTR: social-aware data transmit and relay; UEFS: urban expressway forwarding scheme.
A1: Delay improvement; A2: Packet delivery ratio improvement; A3: Overhead improvement; A4: CR spectrum awareness; A5: Technique; ✓: Including; ×: Excluding.
Performance analysis
We evaluate the end-to-end delay, the packet delivery ratio, and the routing overhead ratio in terms of the short distance of source-to-destination node pairs, the long distance of source-to-destination node pairs, the PUs’ expected OFF time, and the SUs’ densities.
Comparisons under short source-to-destination distances
Figure 5 displays comparisons between six schemes and our proposed UEFS under different short source-to-destination distances, in terms of the end-to-end delay (Figure 5(a)), the packet delivery ratio (Figure 5(b)), and the routing overhead ratio (Figure 5(c)).
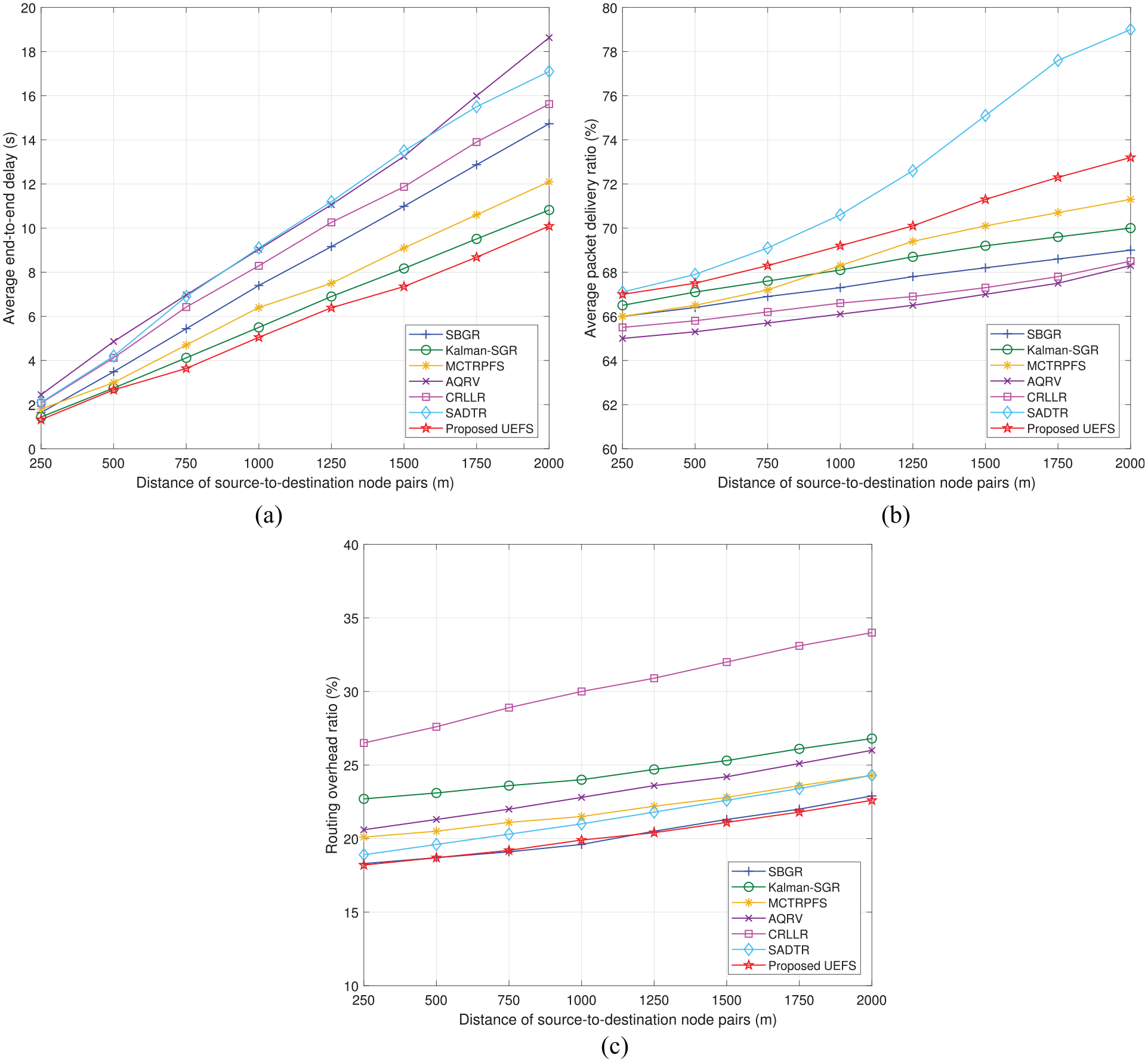
Comparisons under short source-to-destination distances: (a) average end-to-end delay, (b) average packet delivery ratio, and (c) routing overhead ratio.
In Figure 5(a), we present the end-to-end delay of seven forwarding schemes. The end-to-end delay of UEFS is the shortest one at each distance test node. The reason is that UEFS benefits from the considerations of the CR-aware relay candidate selection and forwarding strategy. In the short-distance transmission, for example 250 m, the differences of the end-to-end delay among these seven schemes are not obvious. With the increase of source-to-destination distances, the end-to-end delay of AQRV increases rapidly. It cannot guarantee that the selected channel is with the longest idle time duration. This results in additional channel switching delays. In Figure 5(b), we compare the packet delivery ratios of forwarding schemes under the short distances of source-to-destination node pairs. The packet delivery ratios of all forwarding schemes keep growing with the increase of the source-to-destination distances. UEFS achieves a higher packet delivery ratio than other schemes except for SADTR. It is because that the forwarding strategy of UEFS can deal with different statuses of CR channel availabilities in the current road segment and the next road segment. SADTR performs best due to its social-aware strategies aiming at the packet delivery ratio improvement. Kalman-SGR performs well in the short-distance transmission because of the adaptability of the Kalman filter algorithm in the dynamic system. In Figure 5(c), all routing schemes have upward curves of routing overhead ratios with the increasing of the distance between the source and the destination. UEFS and SBGR perform well in this part. The former one benefits from its strategy that can decrease channel switching times. The later one takes advantage of its beaconless policy.
Comparisons under long source-to-destination distances
Figure 6 shows comparisons between six schemes and our proposed UEFS under different long source-to-destination distances, in terms of the end-to-end delay (Figure 6(a)), the packet delivery ratio (Figure 6(b)), and the routing overhead ratio (Figure 6(c)).
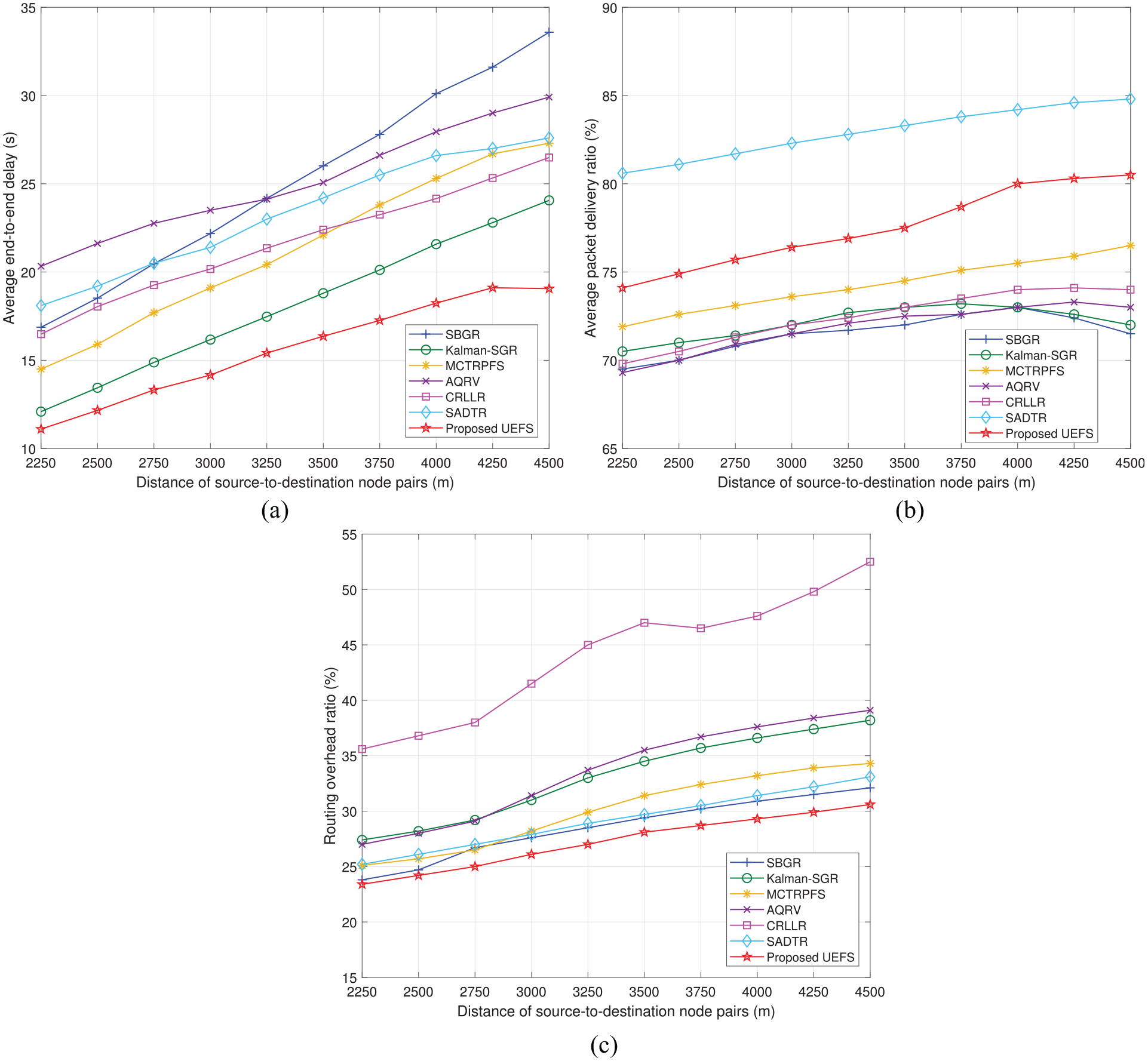
Comparisons under long source-to-destination distances: (a) average end-to-end delay, (b) average packet delivery ratio, and (c) routing overhead ratio.
Figure 6(a) describes the end-to-end delay of different forwarding schemes with long distances of source-to-destination node pairs. As shown in the figure, UEFS achieves the shortest end-to-end delay, no matter how the distance of source-to-destination varies. Different from the short-distance transmission, the number of relay candidates in the long-distance source-to-destination node pairs are more than the number in the long-distance transmission. The probability of all situations of relay candidates in
Comparisons under different PUs’ expected OFF time
Figure 7 displays comparisons between six schemes and our proposed UEFS under different PUs’ expected OFF time, in terms of the end-to-end delay (Figure 7(a)), the packet delivery ratio (Figure 7(b)), and the routing overhead ratio (Figure 7(c)).
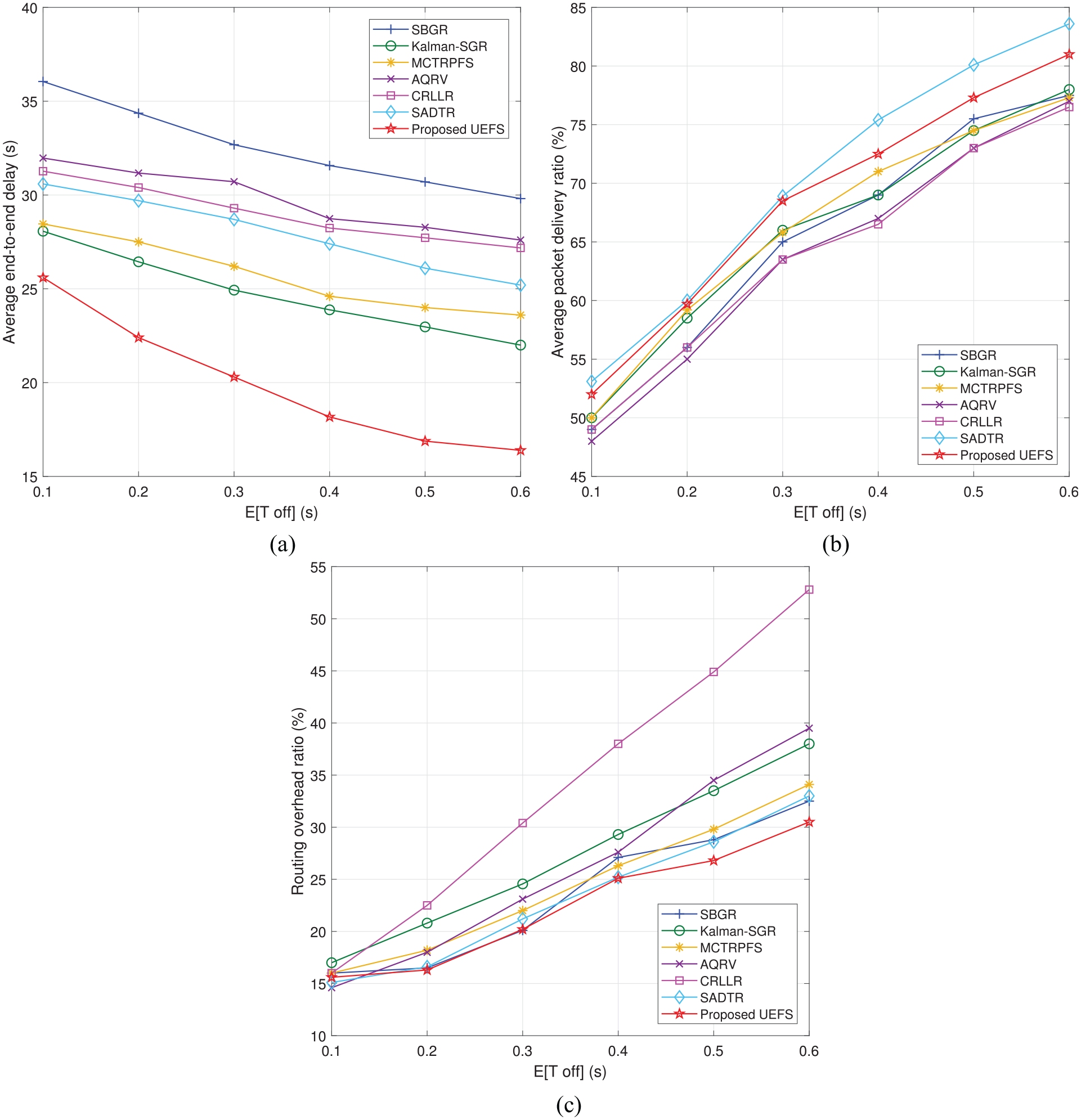
Comparisons under different PUs’ expected OFF time: (a) average end-to-end delay, (b) average packet delivery ratio, and (c) routing overhead ratio.
Figure 7(a) displays the end-to-end delay with different PUs’ expected OFF time
Comparisons under different densities of SUs
Figure 8 shows comparisons between six schemes and our proposed UEFS under different densities of SUs, in terms of the end-to-end delay (Figure 8(a)), the packet delivery ratio (Figure 8(b)), and the routing overhead ratio (Figure 8(c)).

Comparisons under different densities of SUs: (a) average end-to-end delay, (b) average packet delivery ratio, and (c) routing overhead ratio.
In Figure 8(a), we show the results of the end-to-end delay with different densities of SUs. The increase in the number of SUs has a positive effect on the end-to-end delay. UEFS performs better than other forwarding schemes. It always chooses the relay candidate that will reach the next road segment first. This brings an opportunity to execute the next relay process and complete the relay process quickly. SBGR and Kalman-SGR select the relays according to locations of nodes, but do not take the cross-range transmission into account. In Figure 8(b), we compare packet delivery ratios of forwarding schemes with different densities of SUs. The packet delivery ratios of all the schemes are low in sparse networks and high in dense networks. In sparse networks, fewer nodes cause fewer relay candidates and result in the low packet delivery ratio. In UEFS, we select relay candidates considering both available CR channels and valid contact durations between SUs. This selection rule guarantees that UEFS obtains a high packet delivery ratio. CRLLR performs well in this simulation. The reason is that the positive feedback of the ant colony optimization algorithm enhances the reliability of routes from sources to destinations and thus improves the packet delivery ratio. In Figure 8(c), all routing schemes have upward curves of routing overhead ratios with the increase of the node density. It is due to the fact that more SUs cause more relay candidates and forwarding replicas. UEFS achieves the lowest routing overhead ratio in dense networks. SADTR performs well owing to its hybrid policy of reducing the overhead.
Mean values of performance for relevant comparison schemes
We list the mean values of performance for relevant comparison schemes in Table 4. These mean values are calculated by considering all the simulation results in terms of the end-to-end delay, the packet delivery ratio, and the routing overhead ratio.
Mean values of performance for relevant comparison schemes.

SBGR: simple self-protected beaconless geographic routing; AQRV: adaptive quality-of-service-based routing for VANETs; CRLLR: clustering-based reliable low-latency routing; SADTR: social-aware data transmit and relay; UEFS: urban expressway forwarding scheme.
Conclusion
In this article, we have studied the low-latency data forwarding problem in cognitive IoV networks. We have built a model to characterize the delay produced across a link, and we formulated the forwarding problem as a mixed non-linear integer optimization problem. We have proposed a method to determine the potential relay candidates by taking the CR channels’ availabilities and the contact duration of vehicles into consideration. We have proposed three situations for the multi-hop forwarding scheme design, with jointly considered the channel availability and the delay cost of different types of relay candidates. By analyzing the end-to-end delay, we have provided low-latency forwarding strategies for each situation. With numerical simulations, we have demonstrated that the proposed scheme can achieve satisfactory end-to-end delay performance under various network parameters.
Footnotes
Handling Editor: Jerzy Balicki
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article is supported by the National Natural Science Foundation of China (No. 61772386, 61771354), the National Key Research and Development Program of China (No. 2018YFB130500), the China Scholarship Council (No. 201806270154), the Fundamental Research Funds for the Central Universities (WUT: 2019III060), and Hubei Key Laboratory of Transportation Internet of Things (Wuhan University of Technology; No. 2018IOT002).