
Abstract
This article focuses on the problem of scheduling the optimal paths of multiple mobile elements (e.g. robots, vehicles, etc.) to minimize the travel distance and balance the energy consumption and the data gathering latency in wireless sensor networks for smart cities. To partition the network for the multiple mobile elements and compute the trajectories of the multiple mobile elements, we utilize the sensor’s communication range and construct a multiple mobile elements scheduling problem. A heuristic mobile data gathering approach is proposed to solve this problem, which includes the following three steps. The sensor nodes are preliminarily partitioned into four levels, and then the clusterheads are further partitioned, and the traveling tour is scheduled for each cluster. After the first two steps, all the sensor nodes are partitioned reasonably for the multiple mobile elements. In the last step, the traveling tour is scheduled for each cluster, and the meeting point of each clusterhead is determined. We compare the proposed heuristic mobile data gathering with the existing approaches. The results indicate that the travel distance and the data gathering latency are reduced significantly, which further validates that the communication range is beneficial to minimize the travel distance.
Introduction
Smart city aims to improve the city’s sustainability and efficiency and ensures citizens’ quality of life and health. 1 Wireless sensor networks (WSNs) are composed of a few to hundreds or thousands of miniature battery-powered sensor nodes.2–4 As sensor nodes have the characteristics of low cost and small size, to realize smart city, sensors can monitor and record the physical conditions of the environment and have the ability for data processing and wireless communication. 5
In some cases, WSNs need to transmit data to a distant central station. However, the energy of a single sensor node is not enough to communicate directly with the distant station.6,7 Based on the previous research, one of the effective methods for solving this problem is called collaborative beamforming.8,9 It is established by a set of collaborating sensors. These sensors simultaneously transmit properly weighted versions of common data such that their radiated energies are constructively combined in the direction of the central station. However, for long-distance transmission, hundreds of sensor nodes need to transmit the common data at the same time. Mobile data gathering is another effective method. Mobile elements move in a space over time to collect data from sensor nodes.10–12 In this way, the data of a sensor node do not need to be shared with the hundreds of sensor nodes, and the energy consumption can be reduced. Moreover, as the wireless charging technology development matures, these mobile elements can collect the data from sensors and charge these sensors.13,14 The lifetime of a WSN can be extended to infinitely long for perpetual operations. Thus, we choose the second method to collect the data in this article.
Based on the survey of Yu et al., 15 the mobility management schemes of mobile elements are divided into four categories: uncontrollable mobility (UMM), path-restricted mobility (PRM), location-restricted mobility (LRM), and unrestricted mobility (URM). These have been widely studied in recent years. For example, a hierarchical mobile element discovery protocol is proposed in Restuccia et al., 16 which minimizes the energy consumption of sensor nodes. A novel swarm-intelligence-based sensor selection algorithm is presented to optimize network lifetime with pre-defined QoS constraints in Restuccia et al. 17 In Ding and colleagues,18,19 a robust advantaged node placement strategy is provided to establish the robust connectivity of a graph of multiple clusters of nodes. In Yun et al., 20 a distributed algorithm is proposed for maximizing the lifetime of a WSN when there is a mobile element, which is suitable for the delay tolerant mobile element model. According to these research, LRM that is characterized by the constraints on the mobile element location is most widely adopted by WSNs and applied in environmental monitoring. For LRM, the mobile element can only stop at certain locations for data gathering. Thus, the trajectory design and data gathering latency become significant issues.
In the large-scale WSNs, due to the data gathering latency of the mobile element and the limited capacity of the sensor node, the task scheduling for mobile elements plays a critical role in achieving a high charging and information collecting efficiency, 21 and one mobile element is not enough. Thus, these sensor nodes are needed to assign to several mobile elements. The multiple traveling salesman problem (mTSP) is a scheduling problem, which is a generalization of the traveling salesman problem (TSP), and which aims to determine a set of routes for m salesmen who start from and return to a home.22,23 In this article, based on mTSP, a multiple mobile elements scheduling (mMES) problem is formulated to address these issues, which focuses on two crucial topics in this field: how to effectively and reasonably partition the network and how to choose the meeting points to obtain the optimal trajectories. It considers the situation in which the mobile elements have a single depot station. In general, mTSP can be formulated as an integer programming problem.24,25 By incorporating the communication range of each sensor node, the optimization problem becomes a non-convex mixed integer non-linear problem (MINLP) that is non-deterministic polynomial-time hard (NP-hard). If the objective and constraint functions in MINLP are convex, some exact algorithms are available to solve MINLP. However, for non-convex MINLP, it is much more difficult to be solved directly through a general solver to obtain a feasible solution. 26 There are some specific algorithms for general non-convex MINLP. One of the typical methods is branch-and-bound which solves the problem in a tree structure. 27 In addition, branch-and-reduce is a major step forward in the exact solution of non-convex MINLP, which has been introduced by literature.28,29 However, they are difficult for a large number of variables. In recent years, some researchers use the relaxation algorithm to obtain the optimal solution of non-convex MINLP. In Zhou et al., 30 a new dynamic strategy is proposed for activating and deactivating mixed-integer programming (MIP) relaxations in various stages of a branch-and-bound algorithm. The authors in Zhang et al. 31 focus on the unmanned aerial vehicle path-planning problems and propose a lossless convexification method to obtain the optimal solution by transforming the non-convex MINLP into convex programming problem.
For general mTSP, the approximation algorithm and the transformation algorithm are also used for solving it. In Kim et al., 32 the problem of computing the optimal trajectories of multiple mobile elements is investigated to minimize data collection latency in WSNs. They assumed that any pair of neighborhoods overlap with each other and defined two problems, the k-traveling salesman problem with neighborhood (k-TSPN) and the k-rooted path cover problem with neighborhood (k-PCPN). For these two problems, they propose a constant factor approximation algorithm to solve them. In Cheng and Yu, 33 the authors propose a data gathering approach that shortens the length of traveling path by reducing the number of visiting points and uses an approximation algorithm to plan the near-optimal traveling path. In literature,24,34–38 the mTSP is transformed into TSP by clustering algorithm. In Wang et al., 24 considering the factors of the vehicles’ moving energy consumption and the limited recharging capacity, sensors are organized into clusters for easy data collection in wireless rechargeable sensor networks (WRSN). In Fu et al., 38 novel energy synchronized mobile charging (ESync) protocol is proposed, which simultaneously reduces the charger travel distance and the charging delay. A mobile sink-based adaptive immune energy-efficient clustering protocol (MSIEEP) is proposed in Abo-Zahhad et al. 34 to alleviate the energy holes for data gathering in WSNs. In Abuarqoub et al., 35 a self-organizing and adaptive dynamic clustering mobile data collector (DCMDC) solution is proposed to maintain mobile data collector (MDC) relay networks, which is based on the network partitioning. The authors in Cheng et al. 36 propose a seamless streaming data delivery (SSDD) protocol for multihop cluster-based WSNs with mobile elements. In Zhang et al., 37 a node-density-based clustering and mobile collection (NDCMC) approach are presented to combine the hierarchical routing and the data collection in WSNs. However, a direct solution to mMES is difficult to obtain. Based on these research, we design a heuristic mobile data gathering (HMDG) approach.
In this article, we utilize multiple mobile elements to implement the long-distance transmission for WSNs. The multiple sensor nodes partitioning methods are proposed to reduce the number of meeting points and complete the sensor nodes assignment. Based on the communication range of sensor nodes, the traveling trajectories and the meeting locations of the mobile elements are optimized. The main contributions of this article can be summarized as follows:
A multiple mobile elements scheduling optimization problem is constructed to minimize the travel distance in WSNs. Through the use of multiple mobile elements, the long-distance data transmission of sensor nodes is implemented. By balancing the energy consumption and the data gathering latency, the energy-hole is eliminated.
The HMDG approach is proposed for the scheduling problem of multiple mobile elements in WSNs, which has three steps. In the first step, we design a hierarchical algorithm to divide the sensor nodes into four levels, which prevents the mobile elements from stopping at every sensor node and reduces the number of meeting points. Thus, the traveling tour length and the data gathering latency can be shortened. In the second step, we provide two clustering algorithms to further partition the sensor nodes. Each sensor node will be assigned to a cluster and each cluster is assigned only one mobile element. In the last step, the optimal paths and the meeting locations are obtained by considering the communication range of sensor nodes.
The performance of HMDG is evaluated by simulations, and the results demonstrate that HMDG can reduce the travel distance and the data gathering latency.
The remainder of this article is organized as follows. Section “Multiple mobile elements scheduling problem” formulates the mMES problem. The major contributions are introduced in section “HMDG approach,” which proposes a three-step HMDG approach to solve the mMES problem. Section “Performance evaluation” provides a particular case of our approach and compares the results of our approach with some existing approaches. Finally, section “Conclusion” concludes this article.
Multiple mobile elements scheduling problem
Network model and assumption
We assume the case where N sensor nodes are randomly and relatively evenly deployed in a square region
There are M mobile elements out of the region
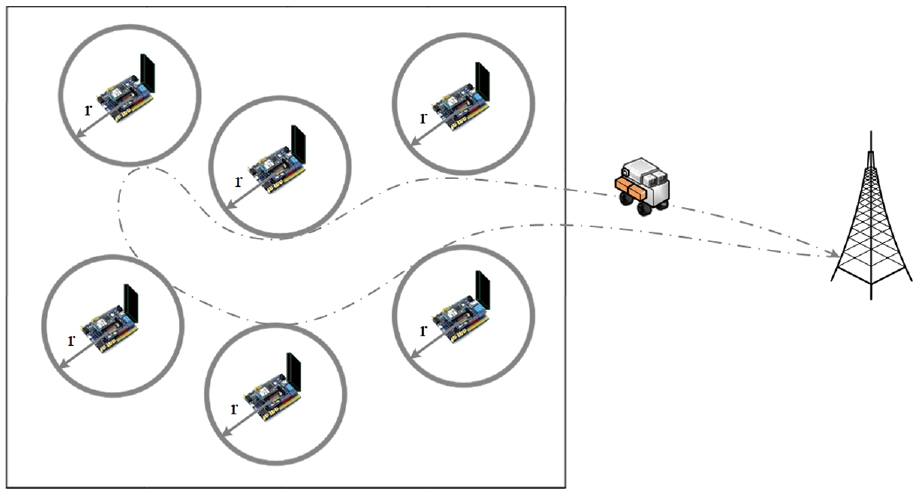
Path demonstration of a mobile element.
Problem formulation
To avoid energy-hole, the traveling trajectory needs to be well scheduled. For a large-scale network, a single tour is not enough for recharging and information transmission. It costs more time, and power outage could occur. Network partitioning is an effective method to solve this problem. 24 After partitioning the network, the mobile elements can visit different clusters simultaneously. We can control the number of mobile elements or the number of sensor nodes within a cluster and optimize the traveling trajectory to avoid the aforementioned problems.
Therefore, we consider the problem of scheduling the optimal trajectories of mobile elements to minimize the total travel distance and find the optimal meeting locations. In applications, each sensor node has its own communication range. To find the optimal meeting locations, the mobile elements do not have to stop at the location of the sensor node. They can stop anywhere in the sensors’ communication range. Thus, the total travel distance can be saved up to
Regarding these issues, giving a set of mobile elements







where
Equation (1b) is the bound constraint for angle
In this problem, the objective function includes the integer variables
HMDG approach
From inter-cluster to intra-cluster, HMDG solves the mMES optimization problem by three steps: (1) Based on the number of neighbors of each sensor node, the four-level network is built. (2) Two clustering algorithms are presented to partition the clusterheads of the four-level network. (3) The optimized traveling trajectories and meeting locations are scheduled. The flowchart of HMDG is shown in Figure 2.

Flowchart of HMDG.
Inter-cluster: network partitioning
First of all, the mobile elements know the serial numbers and the location information of sensor nodes. The initial level setting is

For the first step of HMDG, each sensor node needs to estimate whether the number of its neighbors is less than the threshold value
After preliminarily partitioning, we obtain a four-level network. The sum of the number of sensor nodes of these levels is N, which can be represented as
Distance-sensitive clustering algorithm
In the network, the distance that is from the central station to the cluster may be sensitive for each cluster. Thus, how to control the distance between the central station and the cluster is an important research problem. Based on this issue, we design a distance-sensitive clustering algorithm to shorten this portion of the travel distance.
In order to satisfy this requirement, we need to choose some meeting points that are close to the central station as short as possible. Furthermore, all the sensor nodes whose levels are
First, we divide the edge that is near the central station of the square region into
Therefore, we have the clusters

Demonstration of distance-sensitive clustering in the second step.
K-means clustering algorithm
We also can use the well-known K-means clustering algorithm
40
to further partition these sensor nodes
Using the K-means clustering algorithm, the sensor nodes are assigned to the specific cluster based on the minimized Euclidean distance regarding the centroid of each region. It aims to minimize the following objective function

in which ∥·∥ is the Euclidean distance between a sensor node i of the cluster b and the region’s centroid

Demonstration of K-means clustering in the second step.
Initially, we randomly select
This process is repeated until the centroids do not change any more. Therefore, we have the clusters
Intra-cluster: scheduling the traveling tour for each cluster
In the third step, we focus on how to schedule the optimal paths and meeting locations of the mobile elements. For these selected sensor nodes whose levels are
We adopt the two-step solver 41 to solve this non-convex MINLP problem. After running the solver, each cluster will obtain an optimized path and the location information of the meeting points. In this step, in order to reduce the energy consumption of clusterheads, all the sensor nodes directly transmit data to the mobile element.
Analysis of the network lifetime, energy consumption, and data gathering latency
To effectively transmit data and charge sensor nodes, the mobile elements need to arrive at each sensor node before these sensor nodes have no power. Thus, we need to know the lifetime of sensor nodes.
A sensor node receives a beacon signal from a mobile element and estimates the transmission distance according to the beacon signal strength. Then, the sensor node can adjust the transmission power according to the distance to the mobile element. 42 Thus, we consider the distance-dependent energy consumption model 43 from the data transmission and reception.
As mentioned above, the sensor nodes directly transmit data to the mobile element. To deliver l bits of data over the distance of d, the energy consumption will be

where
For the path loss, the longest distance between a mobile element and a sensor node is r. If a mobile element stops at the location of a sensor node, the shortest transmission distance will be 0.

The average power loss to deliver l bits of data to the mobile element for a sensor node is
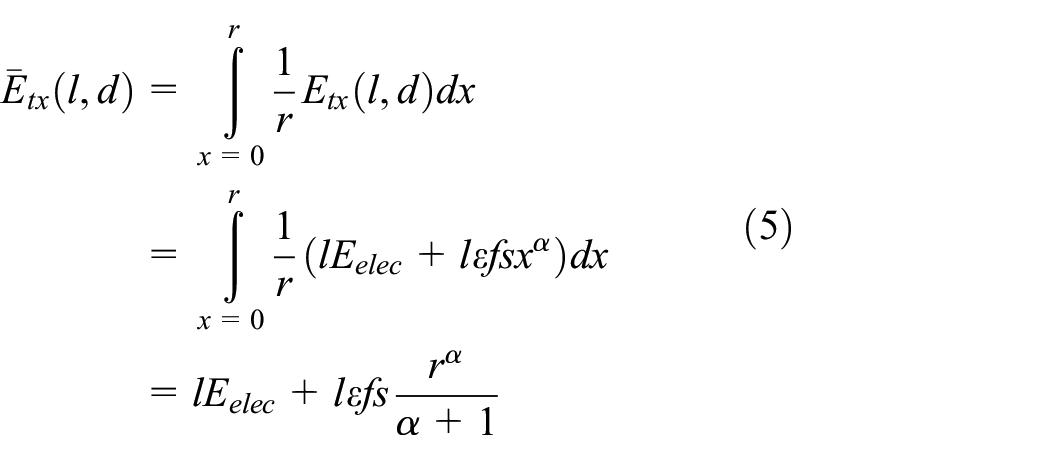
Although a sensor node needs to receive the beacon signal from a mobile element, it requires much smaller energy than sending the data to the mobile element. Thus, we assume

The estimated network lifetime per data gathering round is

Data gathering latency mainly depends on three parts: the sum of the parking time at the meeting points, the traveling time through all the meeting points, and the parking time at the central station. 24 For a cluster, it can be calculated as

and then, for the inter-cluster, it is

where
Performance evaluation
In this section, the algorithm procedure is presented by applying our HMDG to a synthetic example. Then, the performance of HMDG is evaluated by comparing them with a classic TSP-based approach and an mTSP-based approach. Distance-sensitive clustering algorithm and K-means clustering algorithm are also compared in the second step of HMDG. In the end, it is verified that all the sensor nodes can be visited by the mobile elements in each data gathering round.
An example of HMDG
To illustrate the algorithm, we randomly generate 500 sensor nodes in the size of

Results of the first two steps in a synthetic example of HMDG: (a) four-level partitioning result in the first step of HMDG, (b) distance-sensitive clustering result in the second step of HMDG, and (c) K-means clustering result in the second step of HMDG.

Path scheduling results of a synthetic example of HMDG.
Investigating the network lifetime
The network lifetime with different size of communication radius is investigated in this section. A total of 100 sensor nodes and 5 mobile elements are deployed in the size of
The simulation results of the network lifetime are shown in Figure 7. The red line represents the analytical average results, the green line represents the simulation results, and the other lines show the minimum lifetime of each cluster. With the increase of the communication radius, the network lifetime is decreased. The simulation results match the analytical results. The minimum lifetime of each cluster depends on the distribution of the sensor nodes within this cluster. The farther the distance between the meeting point and the sensor node is, the smaller the lifetime is. If the distance is equal to r, the lifetime is minimum. The smaller communication radius leads to less energy consumption and the longer network lifetime, but the travel distance and the data gathering latency will be extended. Based on this, we balance the energy consumption and the data gathering latency in order that the mobile elements will arrive at each sensor node before the sensor node has no power. Thus, energy-hole can be eliminated.

Analysis and simulation results of the network lifetime using HMDG.
Investigating the data gathering latency
The data gathering latencies between different methods are compared in Figure 8. A total of 100 sensor nodes are randomly deployed in the size of

Comparison results between HMDG, mTSP, and TSP with the different movement speed.
Investigating the travel distance
The total travel distance of using the HMDG approach is compared with an mTSP-based approach in this section. The results when the number of sensor nodes varies from 20 to 100 are plotted in Figure 9, and there are two mobile elements. We vary the number of sensor nodes within the network to investigate the impact of the density of the network between these two methods. As shown in this figure, when we use the HMDG, the total travel distance is shorter than the case of the K-means-based mTSP approach. Meanwhile, we consider the impact of the number of mobile elements in Figure 10. As all the mobile elements depart from the sink point, travel in the network, and return back to the same sink point, the total travel distance includes these three parts. Thus, increasing the number of mobile elements may lead to an increase in the total travel distance, but the path length for each cluster decreases. This improves the data gathering efficiency of the large scale network.

Comparison results between HMDG and the mTSP-based approach with the different number of sensor nodes.
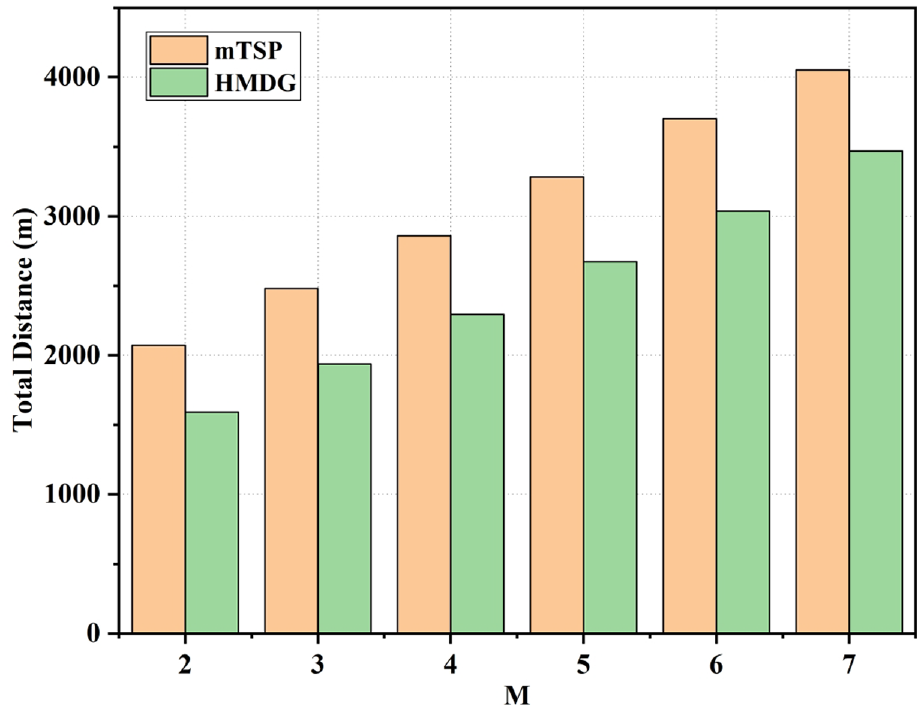
Comparison results between HMDG and the mTSP-based approach with the different number of mobile elements.
Comparison the clustering algorithms in the second step
In section “Inter-cluster: network partitioning,” two methods as the second step of HMDG are presented to partition the clusterheads. In this part, based on the different sensing area size and the different number of mobile elements, we compare the total travel distance using these two methods. Figure 11 shows the total travel distance results when the number of sensor nodes varies from 20 to 100. As shown in this figure, using the distance-sensitive clustering algorithm as the second step of HMDG can obtain a shorter path than using the K-means clustering algorithm as the second step of HMDG when fewer mobile elements serve in the network. Thus, the distance-sensitive clustering algorithm performs better when the ratio of the number of mobile elements to the number of sensor nodes is low, and when there are not many mobile elements in the network.

Comparison results between the distance-sensitive clustering algorithm and the K-means clustering algorithm with the different size of network and the different number of mobile elements: (a) area size is
Impact of the size of communication range
From the above analysis, it is shown that HMDG is an effective method to shorten the travel distance and eliminate the energy-hole. We discuss more details on the impact of the size of the communication radius on the original problem in this section.
We vary the value of communication radius from 10 to 50 m, respectively, for each fixed number of sensor nodes from 20 to 100. Figure 12 presents the results when there are five mobile elements. From this figure, we can see that the travel distance is decreased with the increasing of the size of the communication radius. Considering the communication range can save more movement energy consumption than we do not consider it. However, these sensor nodes are randomly deployed in the field. The result may have some fluctuation each time, which depends on the layout of these sensor nodes.
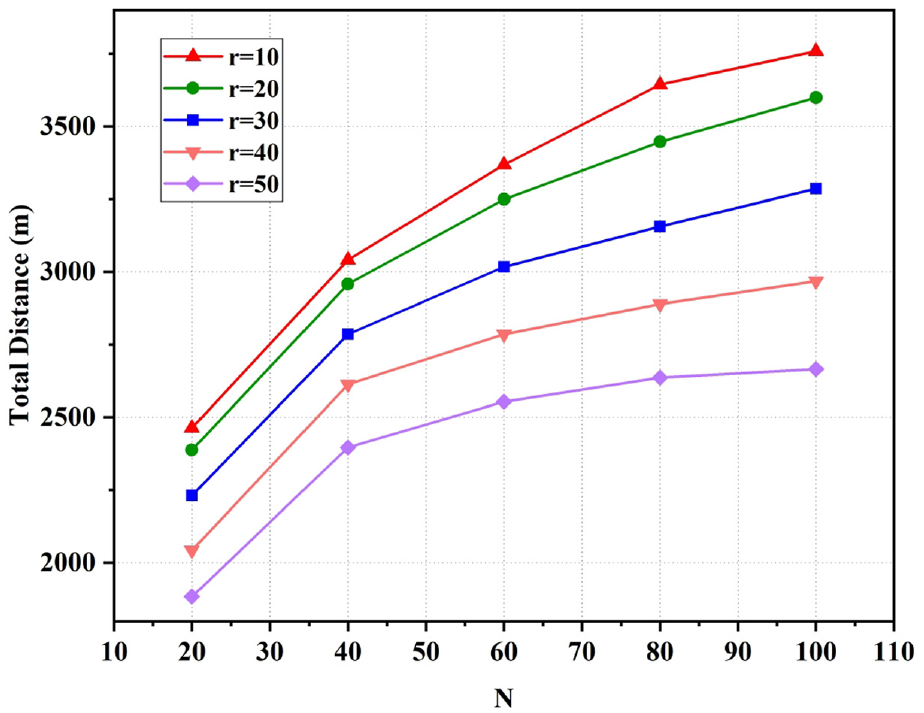
Effects of the different size of communication range on the total travel distance using HMDG.
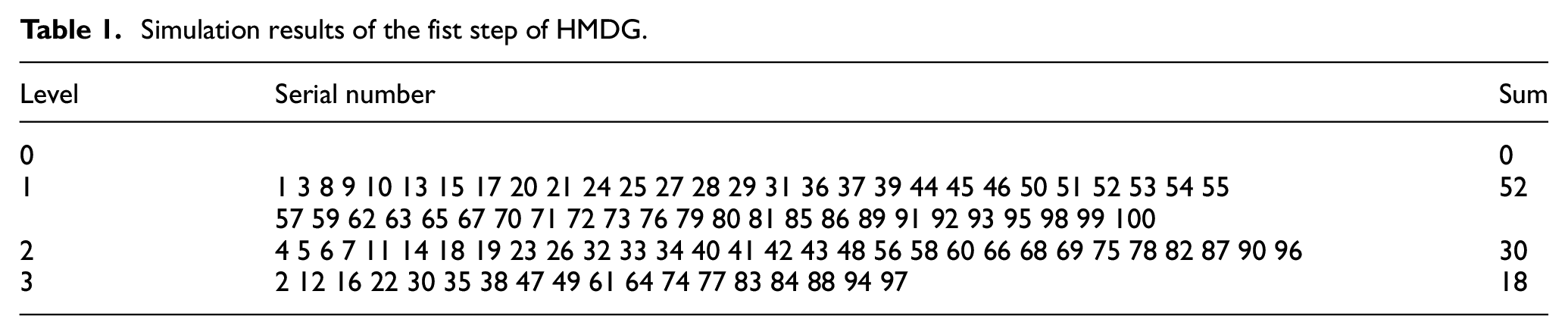
Investigating the visit rate
In this section, the visit rate is investigated, which verifies that all the sensor nodes can be visited in each round using HMDG. In the example, 100 sensor nodes are randomly deployed in the size of
Simulation results of the fist step of HMDG.
Simulation results of the second step of HMDG.

Conclusion
This article mainly focuses on the optimization of the traveling tour for multiple mobile elements in large-scale WSNs. Regarding the capacity limit, the energy consumption, and the data gathering latency, we formulated an mMES optimization problem. To solve this problem, we proposed a HMDG approach that can properly partition the network for the multiple mobile elements and schedule the optimal trajectories of these mobile elements based on the optimal meeting points. We evaluated and compared the proposed approach by extensive simulations. The results showed that both the travel distance and the data gathering latency are reduced significantly. The communication range of sensor nodes is beneficial to shorten the travel distance and reduce the data gathering latency.
Footnotes
Handling Editor: Michel Kadoch
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the project “the Verification Platform of Multi-tier Coverage Communication Network for Oceans (PCL2018KP002).”