
Abstract
Sensor-based structural health monitoring systems are commonly used to provide real-time information and detect damage in complex structures. In particular, wireless structural health monitoring systems are of low cost but, since wireless sensors are powered with batteries, a low power consumption is critical. A common approach for wireless structural health monitoring is to use a distributed computation strategy, which is usually based on consensus algorithms. Power consumption in such wireless consensus networks depends on the number of connections of the network. If sensors are randomly connected, there is no control on the power consumption. In this article, we present a novel strategy to connect a large number of wireless sensors for distributed consensus with low power consumption by combining small networks with basic topologies using the Kronecker product.
Keywords
Introduction
Monitoring complex structures such as aerospace, civil and mechanical infrastructures to provide real-time information and detect damage is referred in the literature as structural health monitoring (SHM). Visual inspection and time-based maintenance procedures are replaced by damage assessment processes using new technological developments such as sensor-based SHM systems. Since large-scale sensor networks are used for SHM, traditional wire-based SHM systems require significant time and cost for cable installation and maintenance. Wireless SHM systems are therefore an alternative solution for low-cost structural monitoring (see previous works).1,2 Moreover, when monitoring aerospace infrastructures such as plane wings, data cables significantly increase aircraft weight and therefore its fuel consumption. Hence, the use of wireless sensor networks (WSN) is a key factor for the fuel-efficiency of aircrafts. For more details on the current research progress see Noel et al. 3 and references therein.
In wireless SHM systems, it is common that each sensor requires a target value that depends on the values measured by other sensors of the WSN. When the WSN has a central entity that computes the target values, sensors have to transmit their measured values to the central entity and this leads to a large energy consumption. Since sensors on a WSN are usually powered with batteries, they have very limited energy resources and hence a reduction in the energy consumption due to transmission (power consumption) increases their life cycle.
The distributed computation strategy is a high-energy efficient strategy, where each sensor computes its target value by interchanging information with its neighbouring sensors. 4 Many practical applications, where the distributed computation strategy is used, rely on the distributed averaging problem (also known as the distributed average consensus problem), which is the problem of obtaining the average of the values measured in all the sensors of the network in a distributed way.5,6
A common approach for solving such problem is to use a linear iterative algorithm that is characterized by a matrix called weighting matrix. Its entries depend on the topology of the network considered. In Xiao and Boyd, 7 the authors showed that a weighting matrix that makes the algorithm the fastest possible (i.e. the algorithm with the lowest convergence time) can be obtained by numerically solving a semidefinite programme, which can also be solved in a distributed way (see Insausti et al.). 8 Unfortunately, except for certain basic network topologies, a closed-form expression for this optimal weighting matrix is not found in the literature.
In the literature, there are many works (see references)9–11 whose goal is to minimize the power consumption in wireless consensus networks. Power consumption of the distributed averaging problem depends on the convergence time of the algorithm used for solving the problem and on the number of connections of the network. Thus, under a convergence time restriction, a reduction in the number of connections leads to a reduction of the power consumption.
If sensors are randomly connected, there is no control neither on the convergence time nor on the energy consumption. In this article, we present a strategy to connect a large number of wireless sensors for distributed consensus with low power consumption. In particular, we consider the case in which the large network is built from other smaller networks with basic topologies, which we call basic building blocks, using the Kronecker product. To connect a large number of wireless sensors for distributed consensus with low power consumption under a convergence time restriction, we previously derived a new mathematical result which is the key that gives a closed-form expression of the optimal weighting matrix for a large network built in such way. Moreover, we show that this optimal weighting matrix only depends on the optimal weighting matrices for the employed basic building blocks. Specifically, applying our result, we determine the basic building blocks to be used to minimize the number of connections of the resulting network. Observe that the number of connections of the network directly determines the power consumption of the sensors due to transmission when the convergence time is fixed.
The remainder of this article is organized as follows: The next section states preliminary considerations and the new mathematical result that gives a closed-form expression of the optimal weighting matrix for distributed consensus on any network modelled using the Kronecker product. In section ‘Problem formulation’, we introduce the problem of designing large wireless consensus networks with low power consumption under a convergence time restriction using the Kronecker product. In section ‘Numerical examples’, we numerically solve the considered problem for certain scenarios. Finally, we present our conclusions in section ‘Conclusion’.
Preliminaries
The distributed averaging problem
Consider a network of
Each node of the network needs to obtain the average (arithmetic mean) of the initial values stored in all the nodes of the network in a distributed way. A common approach for solving this problem is to use a linear iterative algorithm of the form

where

where

Let


where
The convergence time of an algorithm of the form equation (1) only depends on the weighting matrix

whenever
An algorithm of the form equation (1) that minimizes the convergence time is known as the fastest symmetric distributed linear averaging (FSDLA) algorithm, that is, its (optimal) weighting matrix

We denote as

Building networks using the Kronecker product
We recall that the adjacency matrix of a graph

In this article, we use the Kronecker product as a tool for modelling a large network. Let

where

If

A very interesting example of graphs built this way are the grids, which are built using two paths.
A new mathematical result
In this subsection, we give a new mathematical result regarding the FSDLA algorithm on networks built using the Kronecker product. This new mathematical result is key to design large wireless consensus networks with low power consumption. More precisely, we consider a graph
The convergence time of the FSDLA algorithm on
Theorem 1
Let
where
Proof
We divide the proof into three steps.
Step 1: We show that

and

Moreover

for all
Step 2: We prove that

we obtain that

Step 3: We prove that
Observe that proving


Let
Applying Insausti et al.
8
(Theorem 1), we get a subgradient of

where

where
Fix

If

where

As

there exist unit eigenvectors

Consequently, from equations (7) and (8) we get that

and since a convex combination of subgradients is also a subgradient, from Shor 14 equation (6) holds.
Observe that, according to Theorem 1, for obtaining the closed-form expression of the weighting matrix of the FSDLA algorithm on
Problem formulation
In this section, we introduce the problem of designing large wireless consensus networks with low power consumption.
The power consumption (energy consumption of the sensors of the network due to transmission) of the distributed averaging problem depends on the convergence time of the algorithm used for solving the problem and on the number of edges of the network. Hence, under a convergence time restriction, a reduction in the number of edges leads to a reduction of the power consumption.
We aim to connect a large number of sensors (nodes) so that the distributed averaging problem is solved under a convergence time restriction. We build this large network using the Kronecker product of basic building blocks. We study the problem of combining these basic building blocks (allowing repetitions) to minimize the number of edges of the resulting network.
In particular, let

Therefore, to connect the

Observe that
For the reader’s convenience, we end this section with an algorithm that summarizes the implementation of the solution of the considered problem (see Algorithm I).

Numerical examples
Here, we solve the problem introduced in section ‘Problem formulation’ for two different scenarios.
Scenario 1: cycles and paths as basic building blocks
We consider two building blocks with basic topologies
In this scenario, it is possible to obtain an explicit expression of

where the function to be minimized has been obtained by applying equation (5) recursively.
Table 1 shows the numerical resolution of equation (10) when at least
Numerical resolution of equation (10) for at least
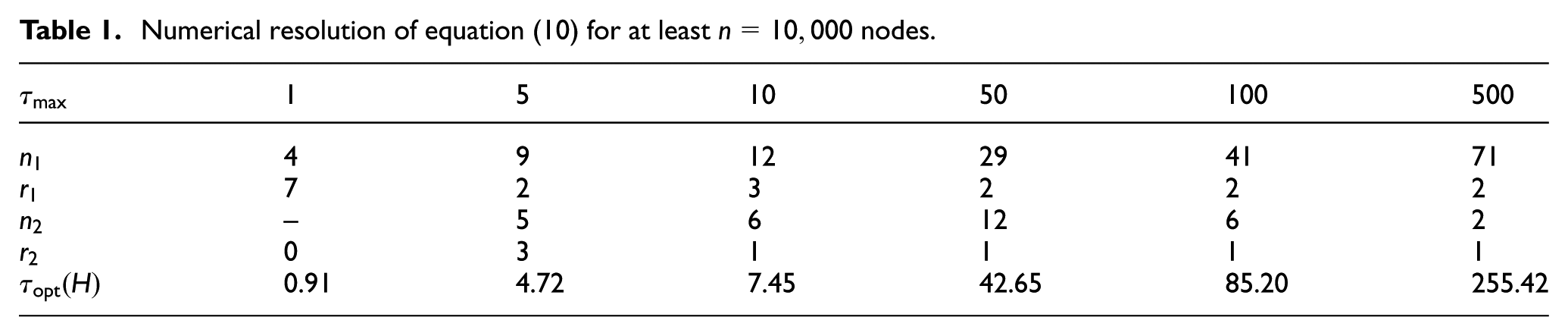
Figure 1(a) and (b) shows the minimum number of edges obtained by solving equation (10) when different number of nodes need to be connected under different convergence time restrictions.

Minimum number of edges for connecting at least
Figure 2 shows the graphs resulting from solving equation (10) when

Graph
Scenario 2: stars and paths as basic building blocks
In this subsection, we study the same scenario considered in subsection ‘Scenario 2: cycles and paths as basic building blocks’, but
In this scenario, the minimization problem in equation (9) can be rewritten as follows

Table 2 shows the numerical resolution of equation (11) when at least
Numerical resolution of equation (11) for at least

Figure 3 shows the graphs resulting from solving equation (11) when

Graph
Conclusion
In this article, we have proposed a method for building large wireless consensus networks with low power consumption under a convergence time restriction. These large networks are built from other smaller networks with basic topologies using the Kronecker product. We observe that the advantage of building a large network this way is that it inherits the symmetries of its corresponding basic building blocks. Hence, the shape of the structure to be monitored determines the suitability of the basic building blocks to be used.
Footnotes
Handling Editor: Mihael Mohorcic
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Basque Government through the CODISAVA project (KK-2018/00082) and by the Spanish Ministry of Economy and Competitiveness through the CARMEN project (TEC2016-75067-C4-3-R).