
Abstract
A scheduling scheme for autonomous intersection crossing is proposed and evaluated. The scheduling scheme determines the flow of autonomous vehicles into an intersection without traffic signals. The objective of the scheduling scheme is to schedule the vehicles’ entrances into the intersection such that there will be no collision among vehicles and the intersection is efficiently utilized. Our scheduling scheme uses reservation-based scheduling approach, and the scheduling is formulated as an optimization problem to find the best sequence of vehicles’ entrances into the intersection. Our scheme is made more practical by allowing the vehicles to move at any speed within a speed range, and it is shown that it is fast enough to be used in real time. Through simulation, it is also shown that our scheduling scheme significantly outperforms the first-come, first-served approach, which is the approach used by other reservation-based scheduling schemes.
Introduction
Autonomous vehicle (AV) is one of the key components of the Intelligent Transport System (ITS). Compared with human drivers, AVs can reduce crashes since they can more accurately monitor and quickly react to its surroundings. They are also expected to follow traffic rules which will eliminate the problems common with human driving such as over-speeding and drunk driving. In addition, AVs can also improve traffic flows, reduce energy or fuel consumption, and reduce vehicle emissions. Hence, many vehicle manufacturers have been showing huge investment in the research and development in this field. 1
ITS works by equipping the AVs and infrastructure with sensors, cameras, and so on, to collect useful data such as the position, speed, and destination of a vehicle. The collected data are then exchanged among the vehicles and the road-side equipment through vehicle-to-vehicle (V2V) or through vehicle-to-infrastructure (V2I) communications. This obtained information is analyzed and used to plan the future actions of the vehicles.
In the conventional traffic system, traffic signals are used to control the flow of the vehicles in the intersection. A problem with the use of traffic signals is that they do not efficiently utilize the intersection especially when the traffic is low. For example, vehicles sometimes have to wait in the waiting area before they can enter the intersection because the traffic signal is red even though no other vehicles are in the intersection. This problem can be solved by introducing the intersection traffic management system, which does not use traffic signals. A study that introduced autonomous intersection management (AIM) 2 has presented an intersection control mechanism that coordinates the vehicles’ routes across the intersection based on the actual observed traffic. Results in Dresner and Stone’s paper 2 show that AIM improves the efficiency of the intersection compared to the intersection that uses traffic signals.
Aside from improving the intersection’s efficiency, it is also important to ensure the safety of the vehicles in the intersection, which means vehicles must be able to travel across the intersection without collision. Crashes are likely to happen in the intersection since vehicles from different directions converge to one common space. 3 Consequently, most studies in AIM have focused on the safety issue and the efficiency improvement in the intersection.
The main objective of this study is to find a collision-free and highly efficient scheme to manage the travel of AVs in the intersection. Our scheduling scheme uses reservation-based scheduling approach. We schedule multiple vehicles in every scheduling phase and use genetic algorithm to find the sequence of vehicles’ entrances to the intersection that minimizes the overall delay of vehicles while also considering the fairness of the scheduling. This is different from other reservation-based scheduling schemes since they take a first-come, first-served (FCFS) approach wherein the vehicles are scheduled in the order that their requests are received by the intersection manager. Moreover, we relax the common requirement that vehicles must always move at a constant speed in the intersection. In our proposed scheme, vehicles can pass the intersection at any speed in the predefined speed range, which makes the proposed scheme more practical.
The rest of the article is organized as follows. In the “Related work” section, we discuss related studies to the AIM. In the “System overview” section, we give a brief background on the reservation-based scheduling, and also describe the intersection environment and the expected behaviors of the vehicles in our system. In the “Scheduling scheme” and “Vehicles can travel in intersection at any speed within the allowed speed range” sections, the proposed scheduling scheme is described in detail. The performance of our scheme is shown in the “Performance evaluation” section, and finally the “Conclusion” section concludes the article.
Related work
Dresner and Stone 2 introduced the reservation-based approach to ensure safety in the intersection, and it is extended by de La Fortelle. 4 It is assumed in de La Fortelle’s paper 4 that the vehicles move in the intersection at the predetermined maximum speed. By making all the vehicles in the intersection move at the given highest speed, the highly efficient usage of the intersection is expected. In Azimi et al.’s paper, 5 the intersection is divided into cells and only one vehicle is allowed to occupy a cell at a time. Differently from other works, however, in Azimi et al.’s paper, 5 the vehicles communicate with each other to coordinate their routes without using the V2I communications platform. In the case when there is a conflict between the routes, FCFS policy is used to decide which vehicle can enter the intersection first.
Other methods proposed in the previous studies6–9 do not discretize the intersection. In Yan et al.’s study, 6 they identified the compatible trajectories of the vehicles in the intersection which are the trajectories that are not in conflict with each other. Then, they group the vehicles with compatible trajectories together and only allow vehicles within the same group to travel across the intersection at the same time. Similar approach with Yan et al. 6 is taken in Li and Wang 7 wherein they only allow vehicles with non-conflicting trajectories to travel the intersection at the same time. Van Middlesworth et al. 8 proposed a scheme for small and low-traffic intersections, which use V2V communication. The vehicles communicate with each other to broadcast their upcoming entrances into the intersection, and the scheme has set of rules to be followed by the vehicles in case the vehicles have conflicting trajectories in the intersection. In Lu and Kim’s paper, 9 instead of discretizing the intersection, the vehicle’s actual occupancy is used. The motivation of Lu and Kim 9 is to overcome the increase in computational complexity of the reservation-based scheduling when the granularity of cells is high. Hence, instead of discretizing the intersection, the discrete time sequence of the vehicles’ actual occupancy in the intersection is obtained and used to detect conflicting trajectories.
In our work, we use the reservation-based approach as proposed by others to solve the issue of collision avoidance in the intersection. Differently from other approaches, however, we do not use the FCFS approach, and we also allow the vehicles to move at any speed within the predetermined speed range to make the proposed scheme more practical.
A study in Levin et al. 10 shows that the system with traffic signals can perform better than the reservation-based scheduling approach on realistic examples. In Levin et al., 10 the FCFS reservations system is compared with traffic signal system on downtown Austin subnetwork. Using FCFS scheme, vehicles are scheduled in the order their requests are received by the intersection manager. Therefore, FCFS scheme will show better performance than traffic signal system when the arrival rate of the vehicles is low. But when traffic is heavy, the traffic signal system will show better performance because it has a property that allows vehicles to enter the intersection by batch. Thus, when traffic is high, we need to devise a more sophisticated scheduling scheme than FCFS, and this is a part of our main work.
Dynamic programming can be used to find optimal sequence of vehicles’ entrances into the intersection as used in Wu et al.’s 11 and Yan et al.’s 6 studies, but the complexity is not acceptable for real-time systems. Li and Wang 7 enumerated all possible sequences and chose the most efficient sequence. However, the complexity also increases as the number of vehicles increases. Some solutions used to find near-optimal solutions include ant colony algorithm and genetic algorithm. A heuristic based on an ant colony system is proposed in Wu et al. 12 Genetic algorithm is used in Lin et al., 13 while active set method and interior point method are used along with genetic algorithm in Lee and Park. 14
System overview
Background on reservation-based scheduling
Our scheduling scheme uses the reservation-based scheduling introduced in Dresner and Stone’s study. 2 In a reservation-based scheduling, the intersection is divided into multiple sections, which we call cells. When a vehicle travels along the intersection, it will occupy a sequence of cells. For the efficient use of the intersection, multiple vehicles should be allowed to be in the intersection at the same time. To implement this approach, a cell needs to be reserved to only one vehicle for a certain period of time. More information on how the scheduling is done will be discussed in the future section.
Intersection model
We consider a four-way intersection with three lanes per way as shown in Figure 1. The intersection is divided into multiple cells, and the road consists of queuing zone and acceleration zone. The queuing zone is where the vehicles can send their reservation requests, while the acceleration zone is where vehicles adjust their speeds so that they enter the intersection as scheduled.
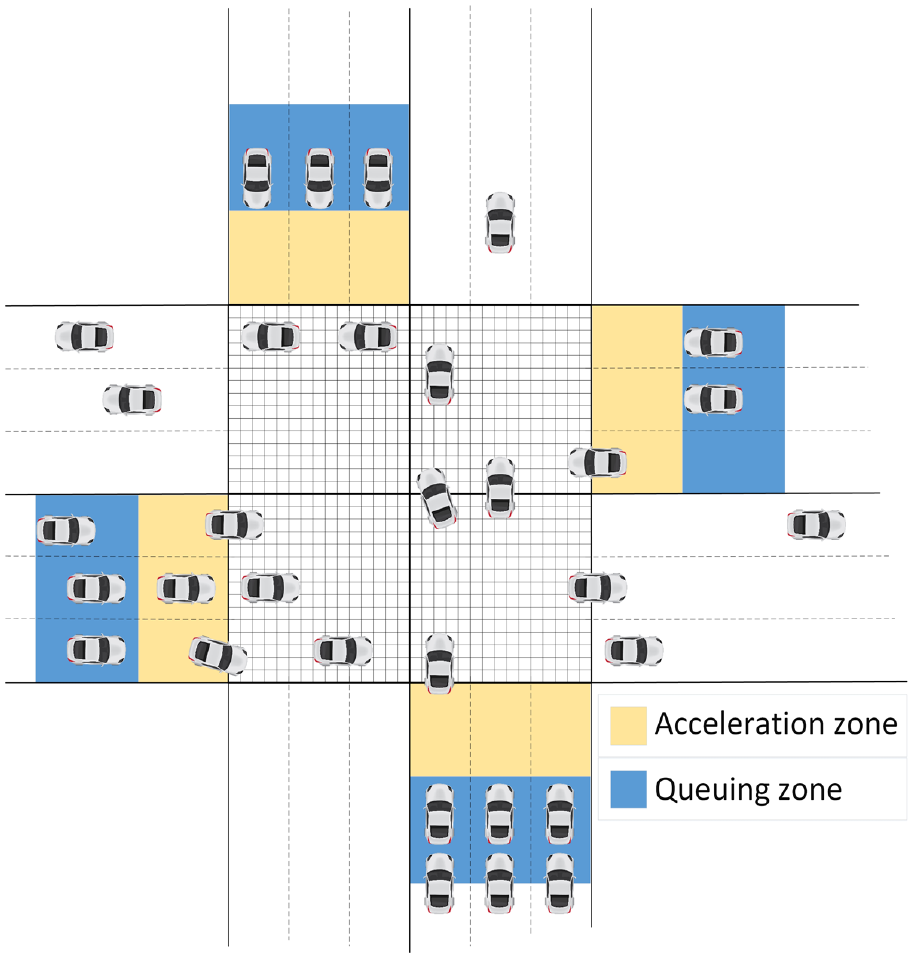
The intersection model used in our scheduling scheme.
The two main parts in our model are the intersection manager and the vehicle. Their roles and expected actions are discussed as follows:
Intersection manager
It receives the reservation requests from the vehicles, schedules their entrance into the intersection, and sends responses to them. Details on the scheduling will be discussed in the later section.
It processes requests every discrete time instant
Vehicle
It is autonomous and is supposed to follow the instructions given by the intersection manager. Human driven vehicles are not allowed.
Aside from ordinary vehicle, it can be an emergency or a transit vehicle. Preferential treatment is given to emergency vehicles and transit vehicles in scheduling.
It generates its own reservation request message before it enters the queuing zone. How to generate the reservation request message will be discussed in the later section.
It can send its reservation request message to the intersection manager only when it is in the queuing zone and it does not have a reservation yet. After sending the request message, it will receive either an acceptance message or a rejection message. If a rejection message is received, it sends the reservation request message again. This will be repeated until it receives an acceptance message. An acceptance message means that it has been successfully processed, and the vehicle must enter the entrance of the acceleration zone as scheduled. The acceptance message includes the time when the vehicle should enter the acceleration zone. More information about the rejection and acceptance message will be discussed in the later section.
Once it enters the queuing zone through a lane, it is to stay at that lane and is not allowed to overtake any vehicles ahead.
In the queuing zone, it can travel at any speed not exceeding the maximum speed in the lane
It cannot enter the acceleration zone without a reservation and can only enter the acceleration zone as scheduled.
Once it enters the acceleration zone, it will either accelerate or maintain its speed so that its speed when it enters the intersection is within the allowed speed range
In the intersection, it can turn left, turn right, or go straight. Its speed must be within the allowed speed range while traveling in the intersection.
It can be of any size and is assumed to be rectangular in shape.
We assume that there is no message transmission delay.
Length of the queuing zone
Since a vehicle can only send request when it is in the queuing zone and it cannot enter the acceleration zone without reservation, we want to avoid the situation where a vehicle will have to stop at the entrance of the acceleration zone simply because it does not have the reservation by the time it reaches there. To find a way to avoid this situation, it is important to notice that up to one
Size of the cell
The granularity of the cells has an effect to the efficiency of the intersection. A cell will be reserved for the vehicle until the vehicle departs from the cell and another vehicle can reserve the cell only after the previous reservation. Moreover, the intersection space can be better utilized by making the cell size smaller since this enables the vehicles to more accurately determine the intersection area that they will occupy for a given time. Thus, using smaller cell size increases the traffic throughput and the intersection’s efficiency. However, decreasing the cell size also increases the scheduling run time. Hence, it is important to use an appropriate cell size that is beneficial to the intersection’s performance, and at the same time, the scheduling time is fast enough to be used in real time.
Intersection crossing plans
A vehicle can either move straight, turn left, or turn right while traveling in the intersection. To minimize the conflict among the trajectories of various vehicles that are in the intersection at the same time, we introduce the intersection crossing plans. The intersection crossing plan determines the lanes that a vehicle can take according to its moving direction as shown in Figure 2. This is applied to all of the four ways.

The lanes a vehicle can take based on the crossing plans.
We have three intersection crossing plans that we can apply to the intersection model. In plan 1, vehicles that will turn left can take lane 1 or lane 2, vehicles going straight can take lane 2 or lane 3, and vehicles turning right can take lane 3. In plan 2, vehicles turning left can take lane 1, vehicles going straight can take lane 1 or lane 2 or lane 3, and vehicles turning right can take lane 3. In plan 3, vehicles turning left must take lane 1, vehicles going straight can take lane 1 or lane 2, and vehicles turning right can take lane 2 or lane 3. When a vehicle can go to more than one lane, the vehicle can be assigned to any lane or it can be assigned to the lane with fewer vehicles in queue.
Based on the actual traffic, we can assign an appropriate intersection crossing plan to be used. For example, when majority of the vehicles in the system are turning left, then we can use the intersection crossing plan 1 since in this crossing plan, two lanes are assigned for left-turning vehicles.
Scheduling scheme
Our scheduling scheme consists of two key parts: the generation of the reservation request message and the scheduling of the vehicles based on their reservation requests. The generation of the reservation request will be discussed in the “Vehicle generates reservation request message” section, while the scheduling of the vehicles will be explained in the “Intersection manager schedules the requests” section.
Vehicle generates reservation request message
As previously mentioned, a vehicle must send its reservation request to the intersection manager so that the intersection manager can schedule its entrance to the intersection. In this section, we describe the information contained in the reservation request message and explain how to obtain this information.
Reservation request message
When a vehicle sends a request, its reservation request message contains the following information:
Vehicle ID;
Vehicle type: emergency, transit, or ordinary;
Reservation request generation
To determine the cells that a vehicle will occupy and the reservation times for them, we simulate the vehicle’s movement in the intersection.
We must reserve cells considering the requirement that the vehicles can travel at any speed within the speed range. Consider an arbitrary cell in the intersection, cellA, that a vehicle will pass through in the intersection. The earliest time that the vehicle will arrive at cellA is when the vehicle travels at the fastest speed possible,
We discretize the simulation time using time interval

Basically, at every time interval
Vehicle’s position and orientation: the vehicle’s position and orientation at a time instant is determined based on its speed, size, entrance lane, and trajectory in the intersection.
Cells that a vehicle occupies: after capturing the position and orientation of the vehicle, we get the cells it will occupy in this position. We can easily check whether that vehicle occupies a cell or not by checking whether the vehicle’s perimeter intersects with any of the cell borders. Note that some of the cells that are inside the vehicle’s perimeters will not intersect with the cell’s border, but this will not cause problem since no other vehicle can reserve those cells since the surrounding cells are to be reserved by this vehicle anyway.
Steps for the simulation are as follows:
1. Initialize rc, rta, and rtd as empty sets.
2. Execute the following steps two times: once using
3. Compute

4. Start the simulation by positioning the vehicle right before the entrance of the intersection. Starting from this position, we simulate the vehicle’s movement and get the cell it occupies at each time step until it exits the intersection.
Initialize
Get the vehicle’s new position after traveling a distance of
Get the cells that the vehicle occupies on this new position.
For each cell that the vehicle occupies at the new position.
If the cell is not yet in rc, then insert the cell to rc, insert
If the cell is already in rc, meaning the cell was already occupied in the previous time step, then change the respective cell’s rtd to the current value of
Increment
Repeat steps 4b to 4e until the vehicle is completely outside the intersection.
After the simulations,
Note that we started the simulation with the vehicle positioned right before it enters the intersection. Thus, we need to update the values of rta and rtd before the request is sent to the intersection manager so that the requested time to the cells is in accordance with the time that the vehicle can actually reach the intersection from its current position when it sends the request. Thus, before it sends the request, the values of rta and rtd must be updated by adding the earliest time the vehicle can reach the entrance of the intersection from its current position, to every value in rta, and adding the last time the vehicle can reach the entrance of the intersection from its current position, to every value in rtd. Finally, after updating the request, the values of rc, rta, and rtd are the information to be sent to the intersection manager for the reservation request.
Intersection manager schedules the requests
As previously mentioned, the intersection manager processes the requests at every
Specifically, the intersection manager does the following at every scheduling time instant
Determine the best sequence of the vehicles’ entrances to the intersection.
Make reservations based on the chosen sequence and send response to the vehicles.
Update the times of current reservations for the next scheduling time.
We discuss each task in detail in the following sections.
Determining the best sequence of vehicles to be scheduled
Since there can be many vehicles to be scheduled at every scheduling phase, we determine the best sequence of vehicles’ entrances to the intersection that will best utilize the intersection. Genetic algorithm is used as the optimization technique to find the best sequence of vehicles. Since it is impossible to predict arrivals of all vehicles, we find an optimal sequence for the vehicles to be scheduled at
In the following sections, which vehicles are to be involved at each scheduling phase is first discussed in the “Vehicles involved in scheduling” section. How to schedule a vehicle is discussed in the “Scheduling a vehicle” section, and the complexity of the scheduling is discussed in the “Complexity of the scheduling algorithm” section. The application of genetic algorithm to our scheduling to be able to determine the best sequence of vehicles is explained in the “Using genetic algorithm to determine the best sequence of vehicles to be scheduled” section.
Vehicles involved in scheduling
The vehicles that are to be scheduled at
Vehicles that arrived in the queuing zone from
Vehicles that are already in the queuing zone before
Scheduling a vehicle
To schedule a vehicle and manage the reservations, the major operations needed to be done to the data are as follows: insertion for storing the scheduled reservations, searching from the current reservations to check whether the vehicle can enter the intersection without colliding with other vehicles, searching for the best time that the vehicle can enter the intersection, and update and delete to maintain the current reservations. Hence, an appropriate data structure should be used for the benefit of algorithm’s complexity. We use red–black trees to store the reservations. Red–black tree is a balanced binary search tree; thus, it performs faster searching, insertion, and deletion compared to other data structures that are not binary search trees. Also, for insertion and deletion, red–black trees perform better than AVL trees since AVL trees need to perform more rotations than red–black trees to make it balanced. In our scheme, one red–black tree is used for each cell in the intersection, and the nodes in the tree represent the vehicles that are currently reserved for that cell. A node in the tree contains the arrival and departure times of a reserved vehicle for that cell.
For each vehicle to be scheduled, the intersection manager must make sure that the requested time duration to each cell in
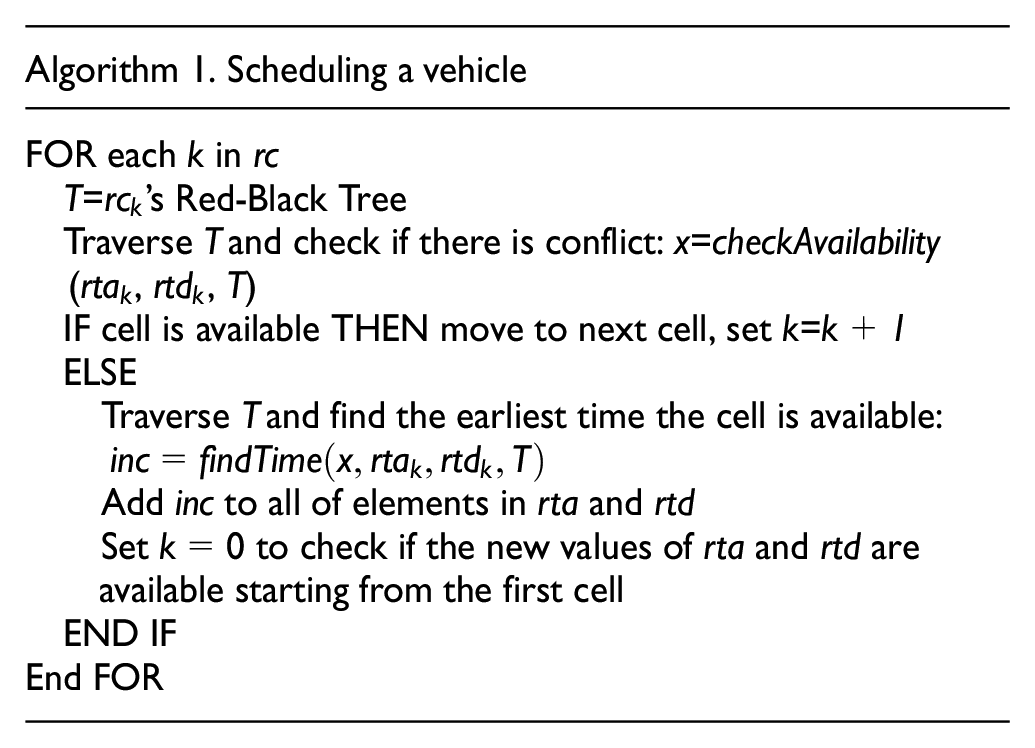
The pseudocode of checking the availability of the requested cells and finding the earliest available time of the cell when it is not available is shown in Algorithm 1.
checkAvailability function
In this function, we check whether the cell is available on the requested time. Basically, we search over the cell’s tree to check whether there is conflict with the requested time and the current reservations. This function returns null if the cell is available and returns the node where there is conflict otherwise.
Let

As an example, consider the red–black tree T of a cell as shown in Figure 3, and we consider a case where the cell is not available, for example, when
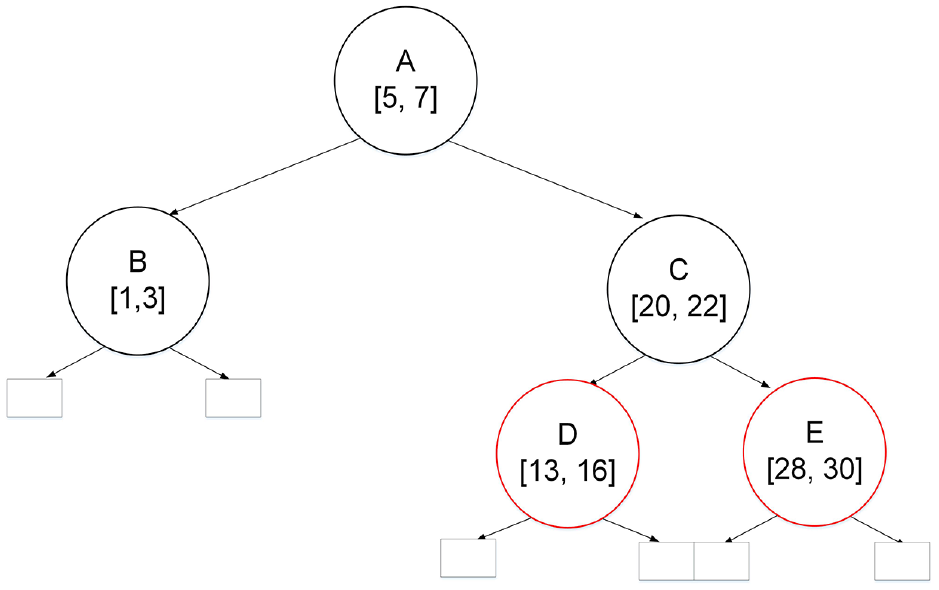
Example of a red–black tree of a cell.
findTime function
When checkAvailability did not return null, it means the cell in rck is not available at the requested time; hence, we find the earliest time that the vehicle can occupy that cell. In this function, we find the value of inc, which is to be added to the values of elements in rta and rtd.
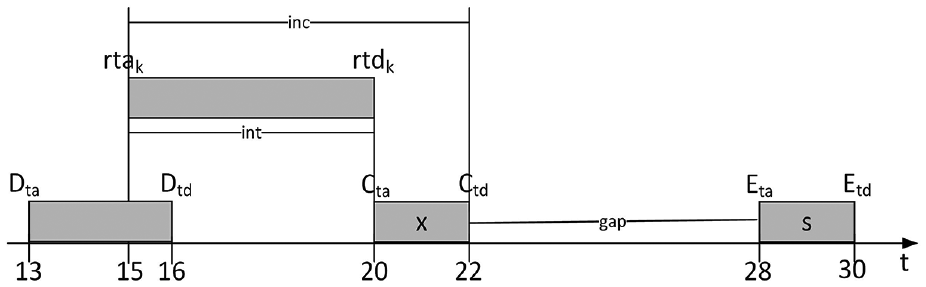
Let node x be the returned node of checkAvailability where the conflict occurred. Let s be the successor of x which is the node whose arrival time is the smallest of all the nodes greater than x. Let sta be the arrival time of s, and xtd be the departure time of x. Let int = rtdk – rtak and gap = sta – xtd.
Starting from x, we find s such that int ≤ gap which means the time interval of the request is less than or equal to the gap between two adjacent nodes. This means we can reserve the vehicle between xtd and sta with new value of rtak = rtak + inc and rtdk = rtdk + inc, where inc = xtd – rtak. The pseudocode of findTime is shown in Algorithm 3.

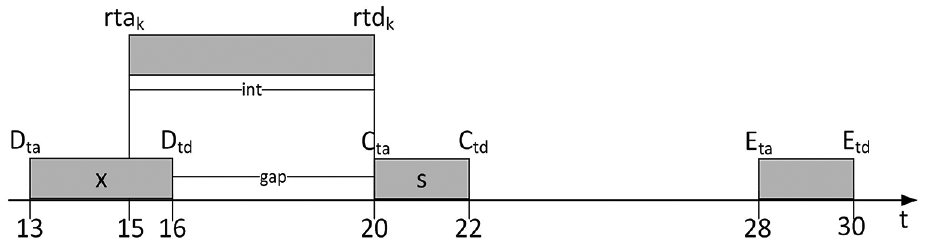
Let us use the example considered in “checkAvailability function” section where the cell is not available when rtak = 15 and rtdk = 20, and red–black tree of a cell is as shown in Figure 3. As illustrated in Figure 4, set int = rtdk – rtak. From checkAvailability, conflict occurred at node D; thus, x = node D. Then, we get the successor of x that is s = node C, and we get gap = sta – xtd. As shown in Figure 4, int > gap; thus, we continue to get the successor of x. For the next iteration, we set x = s = node C and s = node E, as illustrated in Figure 5. Then, we compute gap = sta – xtd. Now, int < gap; thus, we can compute inc = xtd – rtak. The new value of rtak = rtak + inc and rtdk = rtdk + inc which means the cell can be reserved to this vehicle the earliest without colliding with other reserved vehicles at the new time interval [rtak, rtdk], as illustrated in Figure 6.
When x is node D and s is node C, int > gap.
When x is node C and s is node E, int < gap; thus, we get the value of inc.
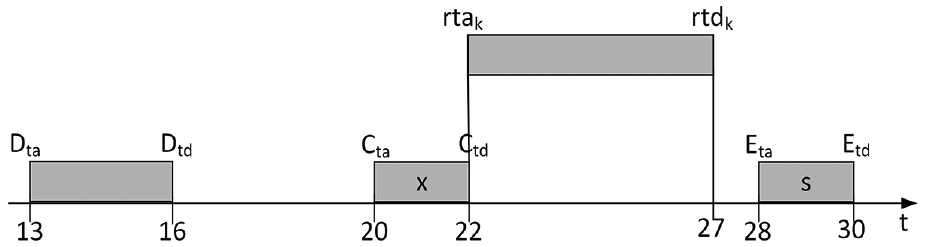
New values of rtak and rtdk after adding inc.
Complexity of the scheduling algorithm
Denote n as the maximum number of nodes of all the trees. The checkAvailability is a standard search operation in a red–black tree; hence, its complexity is
When checkAvailability detects a conflict on
Using genetic algorithm to determine the best sequence of vehicles to be scheduled
To apply genetic algorithm in our scheduling, we represent the vehicle as a gene while one chromosome contains a sequence of genes that represents the order of the scheduling of the vehicles. In generating a chromosome, we have a condition that for vehicles coming from the same lane, the vehicle ahead should be scheduled first. The size of the chromosome is equal to the number of vehicles to be scheduled.
Basically, we generate multiple chromosomes and for each chromosome, we schedule the vehicles based on their order in the sequence. Different chromosomes with different scheduling sequences will give different results to the travel times of the vehicles, queue length of the lanes, throughput in the intersection, and so on. Thus, for each chromosome, we compute its fitness value based on the objective function. Then, from the current set of chromosomes, we select the chromosomes with the top fitness values and include them in the next generation. After selecting the best chromosomes, crossover and mutation are performed to generate new chromosomes for the next generation. The process of selection, crossover, and mutation are repeated to refine the population until the algorithm is terminated. After performing the genetic algorithm, we make reservations based on the sequence of vehicles of the best chromosome.
To give priority to emergency vehicles, we partition the chromosome into two groups which we name as class 1 and class 2. The vehicles in the class 1 are placed at the first part of the chromosome sequence followed by the vehicles in class 2. Class 1 contains the emergency vehicles and the ordinary vehicles that are ahead of the emergency vehicles, while class 2 contains the remaining ordinary vehicles. For each class, we generate random sequences of the vehicles but with condition that for every vehicle, the vehicle ahead(s) must appear in the sequence first. By doing this, we can make sure that the vehicles in class 1 will always be scheduled earlier than the vehicles in class 2, and at the same time, we still get the optimal scheduling for each class. To give conditional priority to other types of vehicles such as transit vehicles, another class can be added and its priority can be reflected accordingly by its assigned class order.
Making reservations based on the chosen sequence and sending response to vehicles
After finding the best sequence through genetic algorithm, we finalize the reservations based on that sequence. However, for each vehicle in the chosen chromosome, a reservation can either be accepted or rejected. If a vehicle’s reservation is accepted, then the reservation is made by inserting the vehicle’s requested arrival and departure times to their respective cell’s red–black trees. Also, the intersection manager will send an acceptance message to the vehicle. Otherwise, it will not save the reservation and will send a rejection message to the vehicle.
When to accept or reject a reservation schedule
After the scheduling phase that started at
Update the times of current reservations for next scheduling time
Since the saved reservation times are relative to the latest scheduling time instant, the values in all of the nodes of every cell’s tree should be updated by decreasing the values of the saved arrival and departure times. Also, a reservation will be deleted when the reserved time to the cell has already expired. This means that a node is deleted from the tree when the node’s departure time is zero which means the vehicle has already departed the cell.
Vehicles can travel in intersection at any speed within the allowed speed range
High throughput across the intersection can be achieved by making the vehicles pass the intersection at a constant and high speed. However, it is not practical in real-world system to assume that all vehicles can always travel at a constant speed in the intersection; thus, we relax this assumption and allow the vehicles to move at any speed within
We determine the values of
Let la represent the length of the acceleration zone, and assuming that the vehicles can accelerate at a rate within

The value of

where

which is equivalent to

The bounds on the
In summary, the variables
Performance evaluation
Performance for different values of
and
Simulations were performed using different values of
Simulation parameters used for different values of speed range.

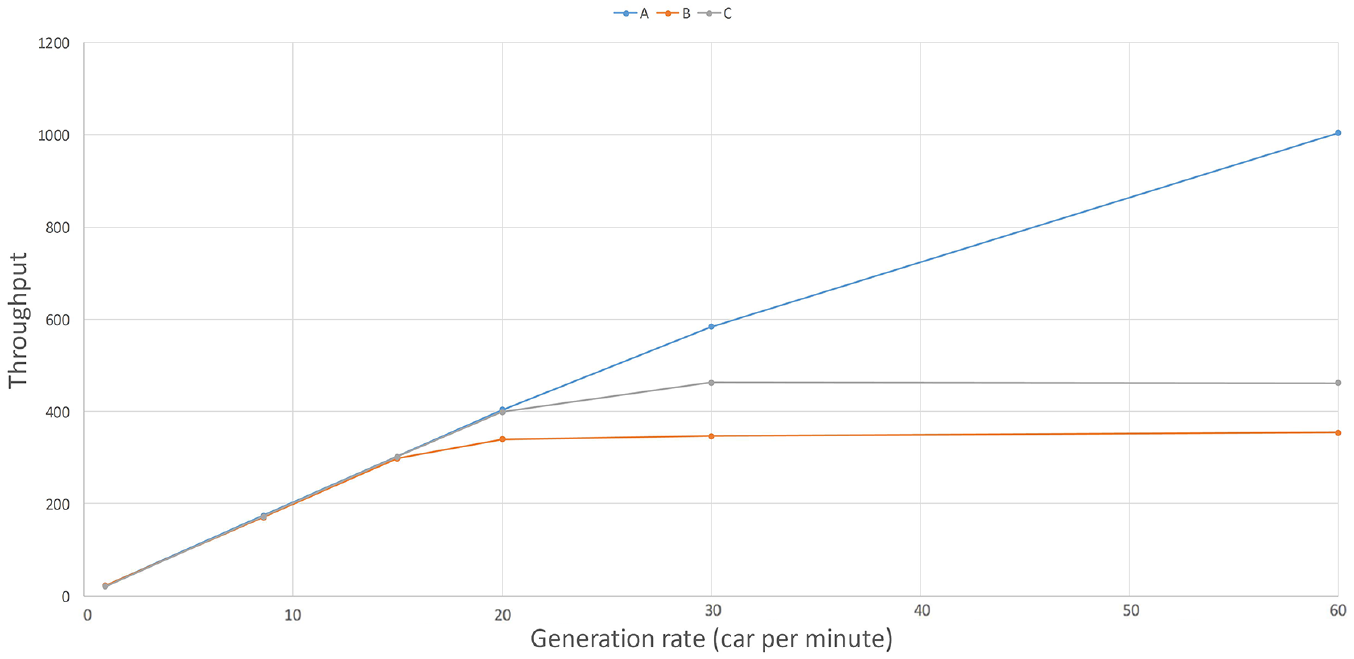
In contrast to our intuition that the system with highest

Comparison of the intersection’s throughput for different values of
Effect on the performance of allowing a speed range for vehicle’s speed
Figure 8 shows the performance of two systems, one is allowing the vehicles to move at any speed within a speed range and another is allowing them to move only at a constant speed. The simulation parameters for the speed range are shown in Table 2. As expected, allowing the vehicles to move at any speed within a speed range decreases the intersection’s throughput. This is because it is necessary to make the distance among the nearby vehicles greater in the intersection to have enough space and avoid collision in the case when any of the vehicles changes its speed. It is also observed that using faster constant speed gives higher throughput compared to slower constant speed.
Comparison of the intersection’s throughput when vehicles must travel at constant speed versus when the vehicles are allowed to travel at any speed within the speed range.
Simulation parameters used for simulation results in Figure 8.

Objective functions for genetic algorithm
To improve the efficiency in the intersection, we tested different objective functions in our scheduling. In this section, we will show two objective functions that we tried in our scheduling and compare their effects to the scheduling results. We run simulations using the simulation parameters listed in Table 3 for the two objective functions.
Simulation parameters used for objective functions 1 and 2.

Objective Function 1: minimize the total delay of vehicles
Using this objective function, the goal is to minimize the total delay of all of the vehicles that are to be scheduled at the current scheduling phase. A screenshot of the simulation using this objective function is shown in Figure 9.

Screenshot of the simulation using objective function 1.
As shown in the figure, the lanes in the north and south ways have longer queues which means they are serviced less frequently compared to the lanes in the east and west ways. This is because the total delay of the vehicles to be scheduled in the current scheduling phase is minimized if we let the vehicles that are on the lanes used by those vehicles in the intersection enter the intersection first. For example, if during the current scheduling phase, the vehicles that are in the intersection are from the east and west ways, then the vehicles in the east and west ways should enter the intersection first to minimize the total delay because they can enter the intersection with smaller delay than the vehicles from north and south ways. And since we allow rescheduling, if the vehicles in the north and south ways will still be in the queuing zone by the time the next scheduling phase ends, then they will be included again in the next scheduling. In the next scheduling, if the current vehicles in the intersection are still from the east and west ways, then the same decision will be made so the vehicles in the east and west ways will be scheduled to enter the intersection first. Because of this issue, we use another objective function which is discussed in the next section.
Objective Function 2: maximize the number of vehicles with accepted reservation
Another objective function we used is to maximize the number of vehicles with accepted reservations, which means we maximize the number of vehicles that will enter the intersection for the following two scheduling times,

Screenshot of the simulation using objective function 2.
In this simulation, the lanes are alternately serviced by group. The vehicles in the east and west ways enter the intersection for a certain period of time, while the queues in the north and south ways are building up. Then after some time, the vehicles in north and south ways enter the intersection for a certain period of time, while the queues build up in the east and west ways. As a result, the problem experienced with objective function 1 is solved. Hence, we use objective function 2 in our scheduling algorithm. In the next section, we compare the result of FCFS with the optimization technique using objective function 2.
Comparison of FCFS scheduling with scheduling using genetic algorithm
We also compared the performance of scheduling using genetic algorithm and FCFS scheduling. We run simulations using the simulation parameters in Table 3 except for the inter-arrival time of the vehicles and the trajectory of the vehicles. In this section, we use different inter-arrival times to see the performance for different traffic rates. We compare their performance through the queuing delay, which is measured as the time spent from the time a vehicle stopped due to a queue of vehicles ahead until the time it entered the intersection.
In our simulation, 15% of vehicles turn left, 60% of vehicles move straight, and 25% of vehicles turn right per way. In Figure 11, we can see that our scheduling scheme using objective function 2 always performs better than FCFS. One problem with FCFS is that since the vehicles are scheduled individually, the vehicles from different lanes cross the intersection alternately. This causes more interruptions to the flow of traffic in the intersection and thus increasing the average queue delay and decreasing the throughput in the intersection. On the contrary, our scheduling algorithm overcomes this problem since it processes multiple vehicles in scheduling and it allows vehicles to enter the intersection by group, thereby decreasing the interruptions in the flow of traffic.

Comparison of queuing delays for scheduling using FCFS and genetic algorithm.
Comparison of the queuing delay experienced by emergency vehicles and ordinary vehicles in class 2
We also compared the queuing delay experienced by the emergency vehicles with the ordinary vehicles in class 2. Specifically, for each simulation, we selected one scheduling phase with one emergency vehicle to be scheduled and obtained the queuing delay of the emergency vehicle and of all the ordinary vehicles included in that scheduling phase. We define the queuing delay here as the time the vehicle spent waiting in the queue from the time the scheduling has started until the time the vehicle has entered the intersection. We run simulations using objective function 2 and the simulation parameters in Table 3 except that we included emergency vehicles, and we also run simulations on different traffic rates. We obtained the average queuing delay of the vehicles after running multiple simulations on each traffic rate.
The result of the simulations is shown in Figure 12. Based on the results, the emergency vehicles experience shorter queuing delay than the vehicles in class 2. Also, as the traffic rate increases, the queuing delay of the vehicles in class 2 increases faster than the emergency vehicles. Therefore, the result shows that we can successfully prioritize the emergency vehicles in our scheduling scheme.

Comparison of queuing delays of emergency vehicles and ordinary vehicles in class 2.
Scheduling run time
To evaluate the applicability of our scheduling scheme to real-world system, we also obtained the actual run time of the scheduling. We use a processor of Intel Core i7-4790 with 3.60 GHz clock speed. The scheduling run time must be less than
Conclusion
In this article, we presented our scheduling scheme for autonomous intersection that is based on the reservation-based scheduling approach. The intersection manager schedules the request using reservation-based approach wherein only one vehicle can occupy a space in the intersection at a time so that there is no collision in the intersection. To improve the efficiency in the intersection, genetic algorithm is used to choose the optimal sequence of vehicles to be scheduled. In the genetic algorithm, the objective used is to maximize the number of vehicles with accepted reservations at each scheduling phase. Also, red–black tree is used to store the reservations and efficiently manage the reservations. We also made the system more applicable to real-world system by relaxing the constraint on the intersection speed requirement and allowing the vehicles to move at any speed within the defined speed range.
For the performance evaluation of our work, we showed results on the effect of the speed range to the throughput in the intersection. We also showed the results on two different objective functions that we tested and showed their effects to the performance of the intersection. Finally, using the second objective function, simulation results show that our scheduling scheme performs better than the FCFS scheduling which is the approach used by other studies that use the reservation-based scheduling. We also evaluated the actual scheduling run time to show that our scheduling scheme can be applicable to real-world systems.
Footnotes
Handling Editor: Rodolfo Meneguette
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF-2018R1D1A1B07049577 and NRF-2017R1D1A1B03035324).