
Abstract
To handle nonlinear filtering problems with networked sensors in a distributed manner, a novel distributed hybrid consensus–based square-root cubature quadrature information filter is proposed. The proposed hybrid consensus–based square-root cubature quadrature information filter exploits fifth-order spherical simplex-radial quadrature rule to tackle system nonlinearities and incorporates a novel measurement update strategy into the hybrid consensus filtering framework, which takes the predicted measurement error into account and hence produces more accurate estimates. In addition, the proposed hybrid consensus–based square-root cubature quadrature information filter inherits the complementary positive features of both consensus on information and consensus on measurements methods and avoids sensitive matrix operations such as square-root decompositions and inversion of covariances, which is beneficial for numerical stability. Stability analysis with respect to consensus, convergence, and consistency for the proposed hybrid consensus–based square-root cubature quadrature information filter is also developed. The effectiveness of the proposed hybrid consensus–based square-root cubature quadrature information filter is validated through a maneuvering target tracking scenario. The simulation results show that the proposed hybrid consensus–based square-root cubature quadrature information filter outperforms the existing algorithms at the expense of a slight increase in computational cost.
Keywords
Introduction
Distributed nonlinear filtering (DNF) algorithms have attracted enormous popularity in recent years. Unlike the centralized solutions, no fusion center is required for distributed filtering, and each node only communicates with its immediate neighbors. Due to its scalability, low communication cost, and robustness to sensor failures, the consensus-based strategies have been extensively studied in the distributed filtering community. In the consensus-based estimation framework, through iteratively exchanging estimated information with its immediate neighbors, each node is able to achieve consensus on final estimates and exhibit comparable performance to its centralized counterpart.
In the linear setting, the well-known Kalman consensus filter (KCF)1,2 updates the posterior estimate with average consensus performed on the prior estimates from neighboring nodes. KCF works well under the condition that all nodes can observe the target of interest. However, it performs poorly in the presence of naive nodes, where the target is neither observed by the node itself nor observed by its immediate neighbors. 3 For nonlinear filtering problems, based on the information weighted consensus filter (IWCF)3,4 and extended Kalman filter, the extended IWCF (EIWCF) 5 was proposed. However, EIWCF suffers from low accuracy and poor stability due to neglect of higher order terms in the Taylor expansion. In such a case, the unscented Kaman filter (UKF), which is a kind of deterministic sampling method, is a better choice. 6 By applying consensus on local estimates from neighboring nodes, Li et al. 7 proposed a weighted average consensus-based unscented Kaman filter (WACUKF) to estimate the true state, and its estimation error has been proved to be bounded in mean square sense. However, since WACUKF directly performs consensus on local estimates, the global optimality cannot be achieved. With two parallel consensus protocols performed on both prior distributions and likelihoods, the consensus on likelihoods and priors approach based on UKF (CLCP-UKF) was proposed to deal with nonlinear filtering problems with naive nodes, which guarantees both estimation accuracy and filtering stability. 8 To solve filtering problems with modeling uncertainties, a distributed multiple model UKF is derived, which computes the mode-conditioned estimates and mode probabilities with consensus strategies. 9 In the above-mentioned algorithms, UKF acts as the underlying filter to solve system nonlinearities. However, an appropriate scaling parameter is required for UKF to achieve acceptable performance. A negative weight in UKF may cause the loss of positive definiteness for the covariance matrix, especially in high dimensional systems, which may make UKF stop its operation.10,11
Similar to UKF, the cubature Kalman filter (CKF) is also a deterministic sampling method to settle nonlinearities, but there are no requirements for scaling parameters. 10 Only dimension of the state vector is needed to compute the cubature points, which can be carried out in advance, and hence eases the burden on curse of dimensionality. In the light of consensus on information (CI), 12 the distributed cubature information filter (DCIF) was developed. 13 However, DCIF ignores the problem of information redundancy. By embedding CKF into the IWCF framework, the cubature information consensus filter (Cub-ICF) was developed for space object tracking with space-based object (SBO) measurements, which effectively overcomes the drawbacks of DCIF. 14 To avoid square-root operations on covariance matrices and improve numerical stability, the square-root version cubature IWCF (SCICF) was proposed. 15 However, in actual applications, only a small number of consensus iterations is allowed, and hence, IWCF-based algorithms may lose the property of consistency. 16 To solve this problem, the hybrid consensus–based cubature Kalman filter (HCCKF) was developed by combining CI and consensus on measurements (CM) together, which takes both accuracy and consistency into account. 17 To tackle the problem of measurement uncertainty, the variational Bayesian consensus CKF (VB-CCKF) was proposed, where VB inference 18 is exploited to iteratively approximate sufficient statistics of the measurement noise covariance. 19 However, the algorithms discussed above are all designed based on the statistical linear error propagation methodology, 20 which is exploited to compute the pseudo measurement matrix. Since the predicted measurement errors are ignored, the corresponding information filters are not equal to its Kalman filtering counterparts.21,22 With approximate compensation for the linearization errors, the hybrid CMCI based on CKF (HCMCI-CKF) was developed for collaborative state estimation, which effectively improves the estimation accuracy. 23
Motivated by the above research, a distributed hybrid consensus–based square-root cubature quadrature information filter (SRCQIF-HC) is proposed. The main contributions include the following: (1) the high-degree cubature quadrature rule is combined with the square-root information filter to develop the proposed SRCQIF-HC, which takes the linearization error of measurement equation into consideration; (2) consensus and convergence of the proposed SRCQIF-HC to the centralized scheme is discussed and analyzed; and (3) stability analysis in terms of consistency of local estimates is facilitated by introducing pseudo transition and measurement matrices. The remainder of this article is organized as follows. Section “Problem formulation” formulates the problem of DNF with networked sensors. A novel Gaussian approximation information filtering paradigm with consideration for the predicted measurement errors is developed in section “A novel Gaussian approximation information filtering paradigm.” In section “High-degree spherical simplex-radial quadrature rule,” the high-degree spherical simplex-radial quadrature rule based on Mysovskikh’s method is derived. The proposed SRCQIF-HC and analysis with regard to consensus, convergence, and consistency of local estimates are presented in section “Distributed SRCQIF-HC.” Simulation experiments are given in section “Simulation experiments.”
Problem formulation
Consider a sensor network consisting of
The communication topology in the sensor network is denoted by an undirected graph
The DNF problem with

and a set of sensor nodes

where
The goal in a distributed filtering paradigm is to obtain, at each time instant
A novel Gaussian approximation information filtering paradigm
For the recursive Bayesian filtering in Gaussian domain, the posterior estimate is obtained through two steps: time update and measurement update, which are carried out based on the Chapman–Kolmogorov equation 27 and Bayes rule, respectively. Both steps involve Gaussian weighted integrals to capture the first two moments of the state. However, it is intractable to analytically compute these integrals. Fortunately, some efficient quadrature rules are available to eventually derive different Gaussian approximation filters, such as UKF based on unscented transformation6,20 and CKF based on spherical-radial cubature rule.10,28,29 With resort to the statistical linear error propagation methodology,15,29 the information form of Gaussian approximation filter can be developed, which is useful for multiple sensor estimation. However, the conventional nonlinear information filters, such as the UIF20,30 and CIF,21,29 are all designed based on the extended information filter architecture, where the predicted measurement errors are not taken into account in the measurement update. It has been pointed out that these information filters are not equivalent to their Kalman filter counterparts and, hence, are less accurate than the corresponding Kalman filters.21,22 Here, the statistical linear regression method 22 is introduced to linearize the measurement equation, where the linearization effect is compensated in the linearization noise. This drives the resulting information filter, which is strictly equivalent to its Kalman filter counterpart.
The integral with respect to the standard Gaussian weighting function can be approximated by Arasaratnam and Haykin 10

where
For a more general Gaussian distribution

According to the numerical integration approximations in equations (3) and (4), the Gaussian approximation information filtering paradigm can be summarized as follows. The time update step is identical with the conventional information filter. The predicted estimate is

where

Based on the statistical linear regression method, nonlinear measurement equation (2) can be transformed into the following linear form22,31

where


and
where
and the cross-covariance

Therefore, the measurement update for node


where
As for multiple sensor nodes, the centralized estimate can be obtained by summation of


The distributed filtering algorithms are designed to achieve comparable performance to the centralized results in equations (15) and (16), which will be shown in the later section. It should be noted that in the conventional nonlinear information filter,
High-degree spherical simplex-radial quadrature rule
It can be seen from section “A novel Gaussian approximation information filtering paradigm” that the choice of quadrature points and associated weights is of fundamental significance for the estimation accuracy. The basic problem is how to choose
Consider the Gaussian weighted integral in equation (3), let
where
The spherical integral

where

with
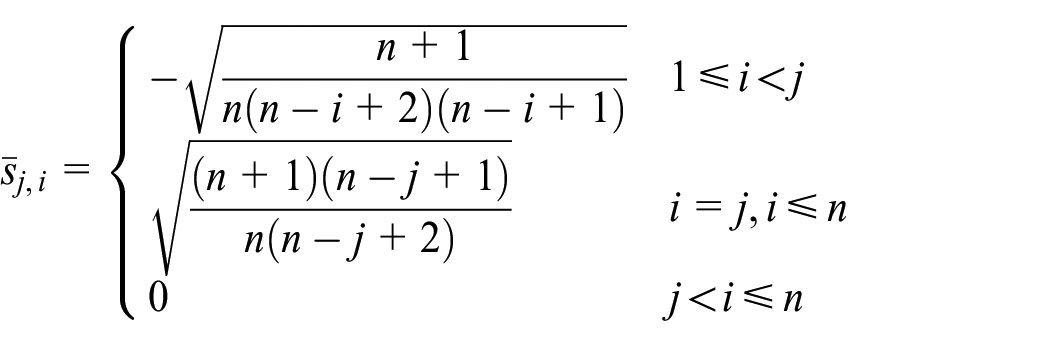
In a similar way, the fifth-degree spherical simplex-radial rule is constructed by

where the points set of

with associated weights

Note that the number of points in set
The radial integral

where
For the third-degree radial rule
where the last equality holds for the fact that

Similarly, the fifth-degree radial rule with two quadrature points is determined as
where
Exploiting equations (18) and (22) in equation (17), the third-degree spherical simplex-radial rule is obtained as
Similarly, substituting equations (19) and (23) into equation (17), the fifth-degree spherical simplex-radial rule is formulated as

Therefore, spherical simplex-radial quadrature points
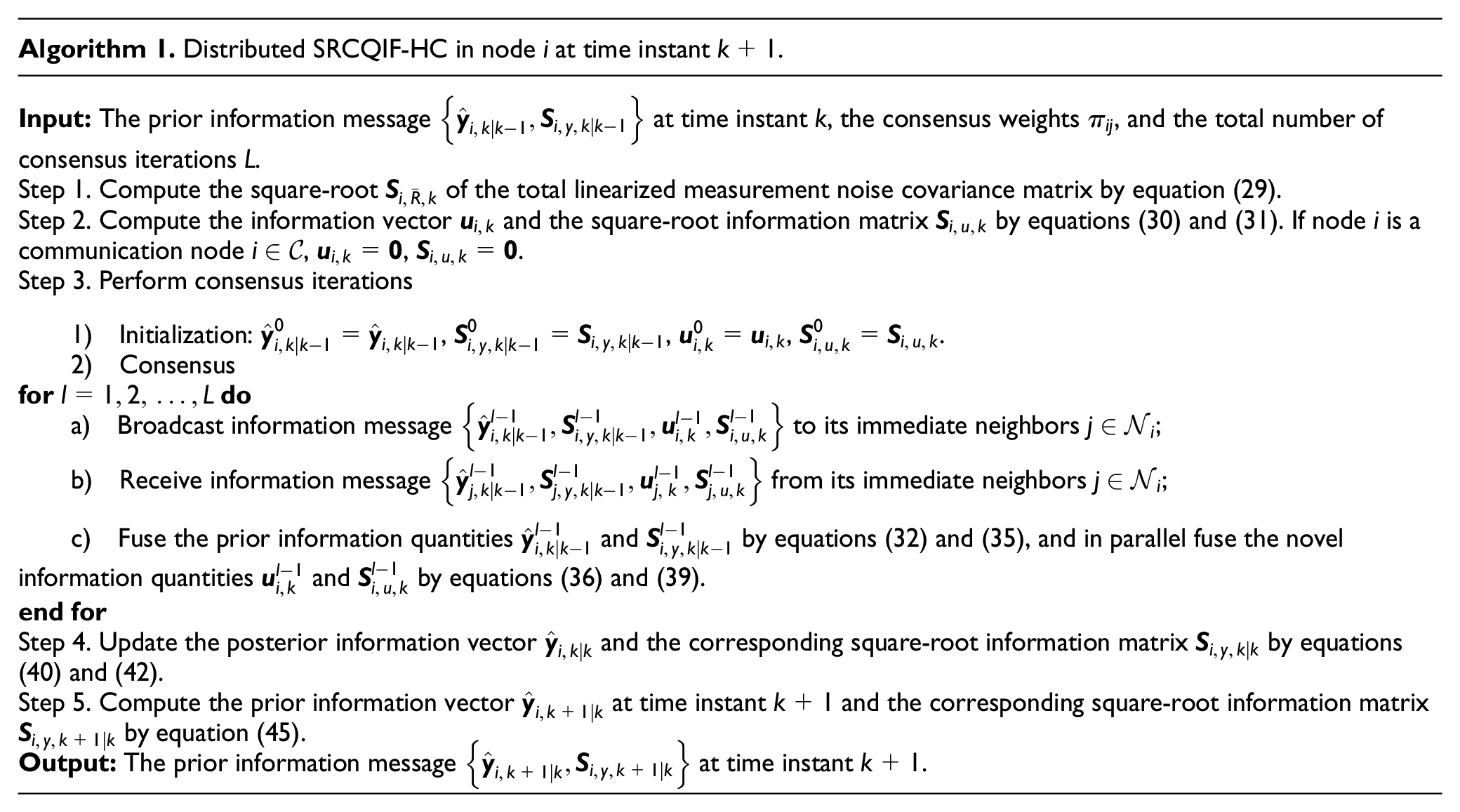
Distributed SRCQIF-HC
As is discussed in Battistelli and Chisci, 12 the CI method can guarantee stability in the mean square error boundedness sense for any number of consensus iterations (even a single iteration). However, it adopts a conservative fusion rule based on the assumption that the correlation between the estimates from different nodes is completely unknown. As a result, the novel information is unavoidably underestimated such that the estimation accuracy may be deteriorated. In contrast, the CM method only fuses the novel information and hence avoids any conservative assumption on the correlation between estimates. The multiplication by some scalar weights in CM can result in improved estimation performance. However, it ensures stability only with an adequate number of consensus iterations.8,16 Undoubtedly, this will be challenging when communication resources are constrained, which is often the case in actual applications. To integrate the benefits and neutralize the drawbacks of both approaches, the HCMCI method is developed to perform consensus on both prior and novel information. 16 In addition, it can be seen from section “A novel Gaussian approximation information filtering paradigm” that the generation of quadrature points involves square-root decomposition of covariance matrix, which is a numerically sensitive operation requiring the covariance to be positive definite. However, due to limited word length and rounding errors in an embedded system, the positive definiteness may be destroyed and, thus, render the system unstable. To further enhance the numerical stability and accomplish the nonlinear filtering task in a distributed manner, a distributed SRCQIF-HC is proposed.
Square-root cubature quadrature information filter based on hybrid consensus
Assume, at time instant

where

and
According to equation (8), one has

Exploiting equations (26) and (27) in the computation of

Therefore, the square-root of

Here,
Substituting equation (29) into equations (13) and (14), one has


Performing consensus on the prior information, one has


where

where

Here,
Similarly, performing consensus on the novel information with initialization of


Substituting equation (31) into (37) yields

where

Here,


where
Due to the fact that

where
The prior estimate

where

Here,

Up to now, the filtering recursion from time instant
Consensus and convergence
Consensus and convergence are of great importance for the consensus-based algorithms. Here, a brief discussion about the two issues is given below. Before analysis of the proposed SRCQIF-HC, the following lemma is necessary.
Lemma 1
If the consensus matrix

where
Theorem 1
If
Proof
It is possible to write the prior information vector

Since

That is, for any node

Since

Therefore,

The proof is now completed.
It should be noted that after consensus, the estimation accuracy depends on the choice of the scalar weights
Theorem 2
If
Proof
In the light of Lemma 1, one has

and

Therefore, it is achievable to write equations (40) and (41) as

Suppose each node enjoys identical prior estimates, that is

For communication nodes, there is no novel information available, and hence,
It is shown in Theorem 2 that the proposed SRCQIF-HC can achieve the performance of its centralized counterpart with an infinite number of consensus iterations. However, in practical applications, only a finite, even small number of consensus iterations are accessible. In such a case, the choice with

where

ensures that the novel information for each node is never overestimated. Actually, the weight

Consistency of local estimates
The stability of the proposed SRCQIF-HC is analyzed in terms of consistency. The square-root filter is mathematically equivalent to its standard counterpart, and it is used to overcome the numerical problems resulting from finite word length processor. It has been proved in Simon 40 that the stability of square-root filter is exactly equivalent to that of its standard counterpart. To discuss the consistency analysis of the proposed SRCQIF-HC, the statistical linear error propagation methodology20,29 is applied here to linearize the nonlinear system.
The cross-covariance between the previous estimate and the current prediction can be written as

Then, the pseudo transition matrix is

where

The pseudo measurement matrix

where the unknown instrumental matrix
According to equation (61),
For simplicity,

where
Definition 1
Consider a random vector
It indicates in Definition 1 that the true error covariance is always upper bounded (in the positive definite sense) by the estimated error covariance. From the perspective of information filter, the information pair
Lemma 2
For any positive semidefinite matrices
Theorem 3
If the initial estimate

with
Proof
See the Appendix 1.
Note that it is easy for the initial estimate of each node to be consistent. In the worst case where no prior information is available, the initial values can be chosen as
Simulation experiments
In this section, a typical nonlinear air traffic control scenario10,17 is considered to test the performance of the proposed SRCQIF-HC. The nonlinear dynamic is modeled by
where

Each simulation runs
Similar to Chen et al., 17 there are 10 sensors randomly located at the [−4000 m, 4000 m] × [−4000 m, 4000 m] area. The network consists of four sensor nodes and six communication nodes. The communication topology is shown in Figure 1. The measurement equation is modeled by

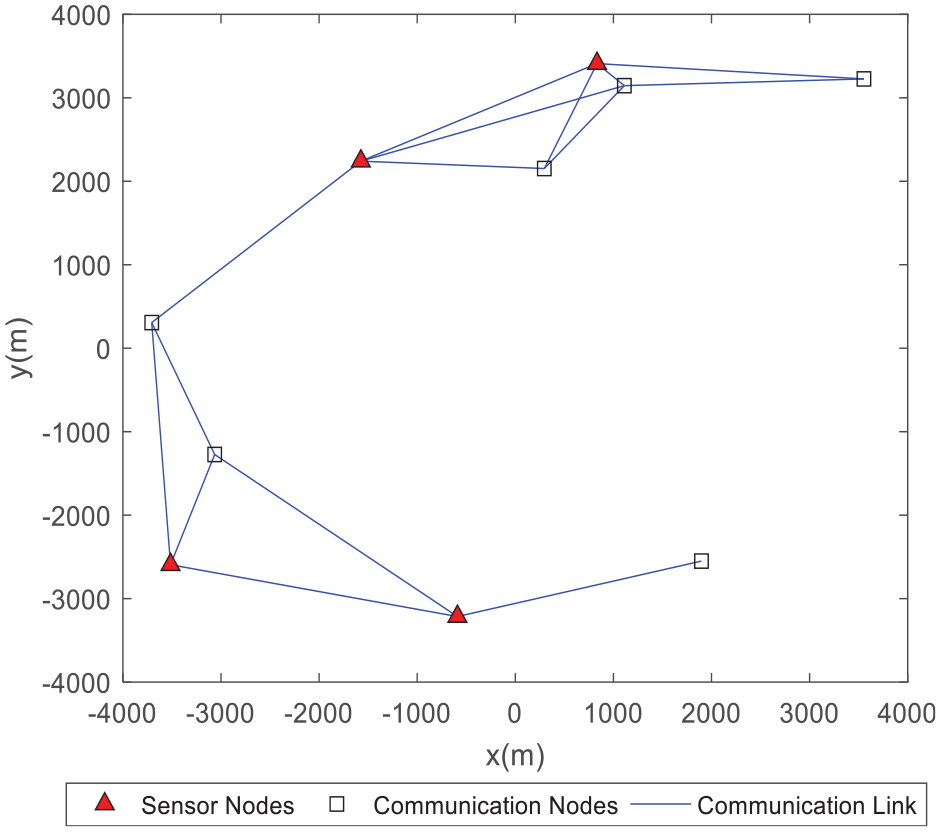
An illustrated sensor network with sparse connectivity.
where
We carry out
Performance metrics
Several standard performance metrics are used here to compare the accuracy, consistency, consensus, and computational cost of the distributed algorithms under discussion.
Root mean square error (RMSE): The RMSE indicates the accuracy of an estimation algorithm. 23
Normalized estimation error squared (NEES): The NEES is a measure to check for filter consistency. 44
Averaged consensus estimate error (ACEE): The ACEE suggests the estimation bias between different nodes. 45
Computational cost: The computational cost is measured by the average running time (RT) of one-step filtering over all time steps. 15
The RMSE behaviors in position, velocity, and turn rate with a single consensus iteration are shown in Figures 2–4. It can be seen that the SCICF and Cub-ICF are less accurate than other distributed algorithms discussed in the scenario. HCCKF and HCMCI-UKF, which are based on the conventional information filtering paradigm, are less accurate than HCMCI-CKF, SRTCQIF-HC, and SRFCQIF-HC, which update the posterior estimates with the novel scheme presented in section “A novel Gaussian approximation information filtering paradigm.” In addition, the proposed SRTCQIF-HC and SRFCQIF-HC exhibits higher estimation accuracy than HCMCI-CKF. To further investigate the estimation accuracy with different consensus iterations, the average RMSE in position is shown in Figure 5. As consensus iteration increases, the estimation accuracy of all algorithms is improved. In specific, HCCKF and HCMCI-UKF have comparable performance but are much better than SCICF and Cub-ICF. The performance of HCMCI-CKF and SRTCQIF-HC are also analogous to each other but much less accurate than that of SRFCQIF-HC derived from higher quadrature rules, which approaches closer to the CRLB with increasing consensus iterations. To facilitate a more comprehensive analysis on estimation accuracy, the average RMSEs in position, velocity, and turn rate are given in Tables 1–3, which indicate that the proposed SRFCQIF-HC achieves higher accuracy than the algorithms compared.

The RMSE in position with a single iteration.

The RMSE in velocity with a single iteration.

The RMSE in turn rate with a single iteration.
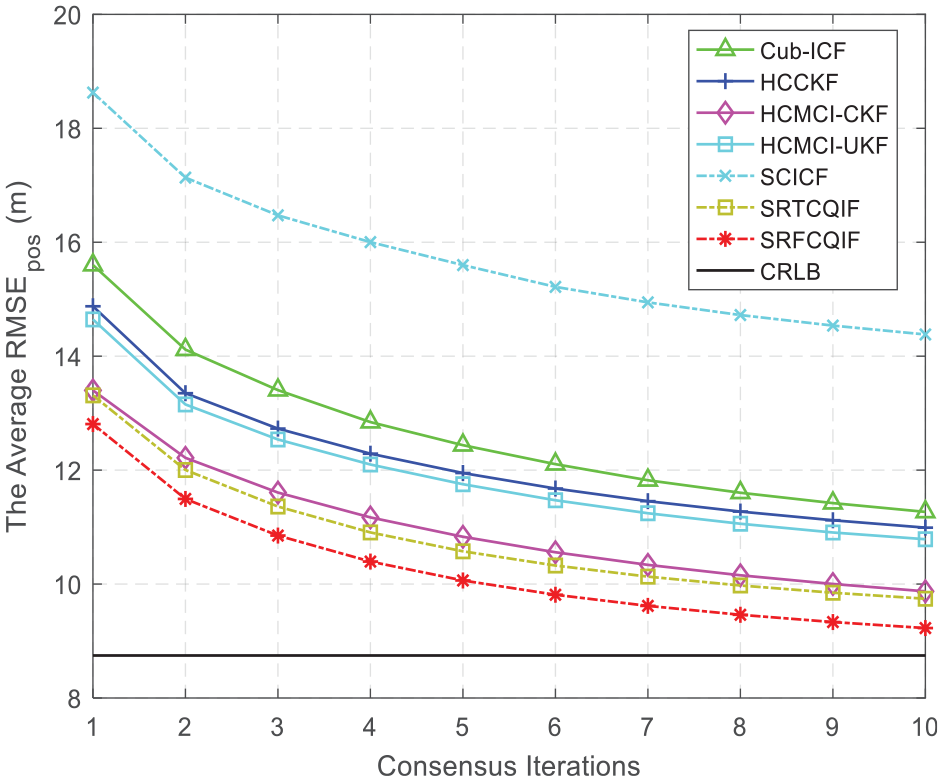
The average RMSE in position with different number of consensus iterations.
The average RMSE in position for different algorithms.

RMSE: root mean square error; Cub-ICF: cubature information consensus filter; HCCKF: hybrid consensus–based cubature Kalman filter; CKF: cubature Kalman filter; UKF: unscented Kaman filter; SCICF: square-root version cubature IWCF; SRTCQIF-HC: third-degree SRCQIF-HC; SRFCQIF-HC: fifth-degree SRCQIF-HC; CRLB: Cramér–Rao lower bound; IWCF: information weighted consensus filter; SRCQIF-HC: hybrid consensus–based square-root cubature quadrature information filter.
The average RMSE in velocity for different algorithms.
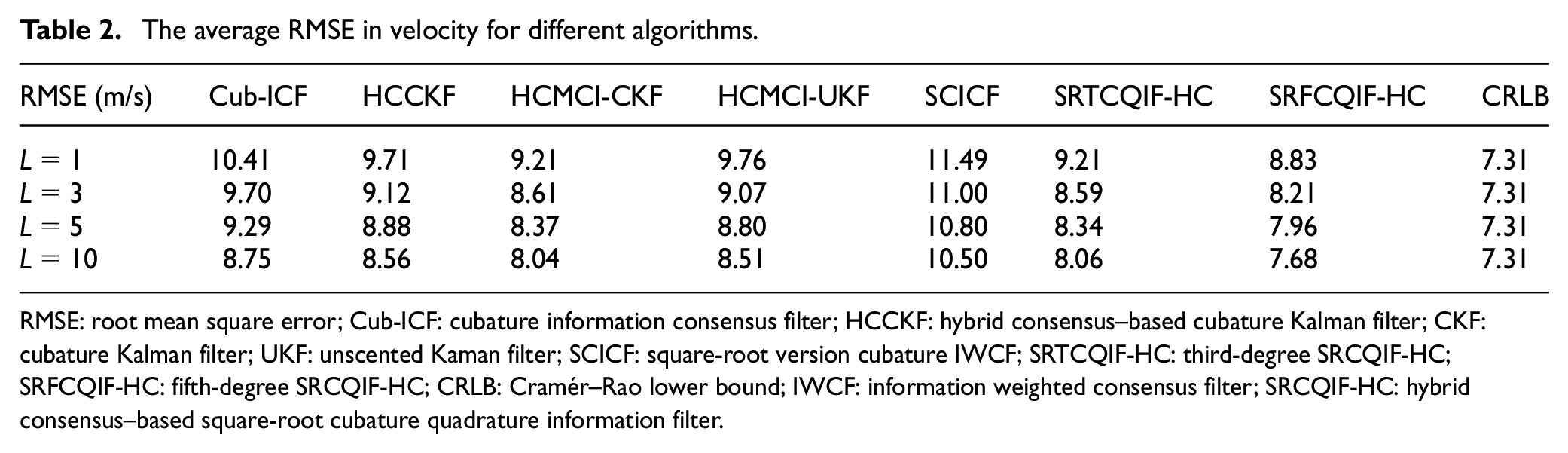
RMSE: root mean square error; Cub-ICF: cubature information consensus filter; HCCKF: hybrid consensus–based cubature Kalman filter; CKF: cubature Kalman filter; UKF: unscented Kaman filter; SCICF: square-root version cubature IWCF; SRTCQIF-HC: third-degree SRCQIF-HC; SRFCQIF-HC: fifth-degree SRCQIF-HC; CRLB: Cramér–Rao lower bound; IWCF: information weighted consensus filter; SRCQIF-HC: hybrid consensus–based square-root cubature quadrature information filter.
The average RMSE in turn rate for different algorithms.

RMSE: root mean square error; Cub-ICF: cubature information consensus filter; HCCKF: hybrid consensus–based cubature Kalman filter; CKF: cubature Kalman filter; UKF: unscented Kaman filter; SCICF: square-root version cubature IWCF; SRTCQIF-HC: third-degree SRCQIF-HC; SRFCQIF-HC: fifth-degree SRCQIF-HC; CRLB: Cramér–Rao lower bound; IWCF: information weighted consensus filter; SRCQIF-HC: hybrid consensus–based square-root cubature quadrature information filter.
Figure 6 shows the average NEES curves of different algorithms with 95% confidence interval. The curve of Cub-ICF lies much higher than the concentration region, which shows poor consistency of local estimates. On the other hand, most points of the NEES curves of the remaining algorithms lie either below or within the concentration region, which demonstrates improved consistency. The ACEE of different algorithms is shown in Figure 7. With increasing consensus iterations, better consensus on local estimates is shown through lower ACEE. Moreover, the proposed SRFCQIF-HC has much lower ACEE than all the other algorithms, which indicates that SRFCQIF-HC achieves the fastest consensus rate among the discussed algorithms.

The NEES of different algorithms with a single iteration.
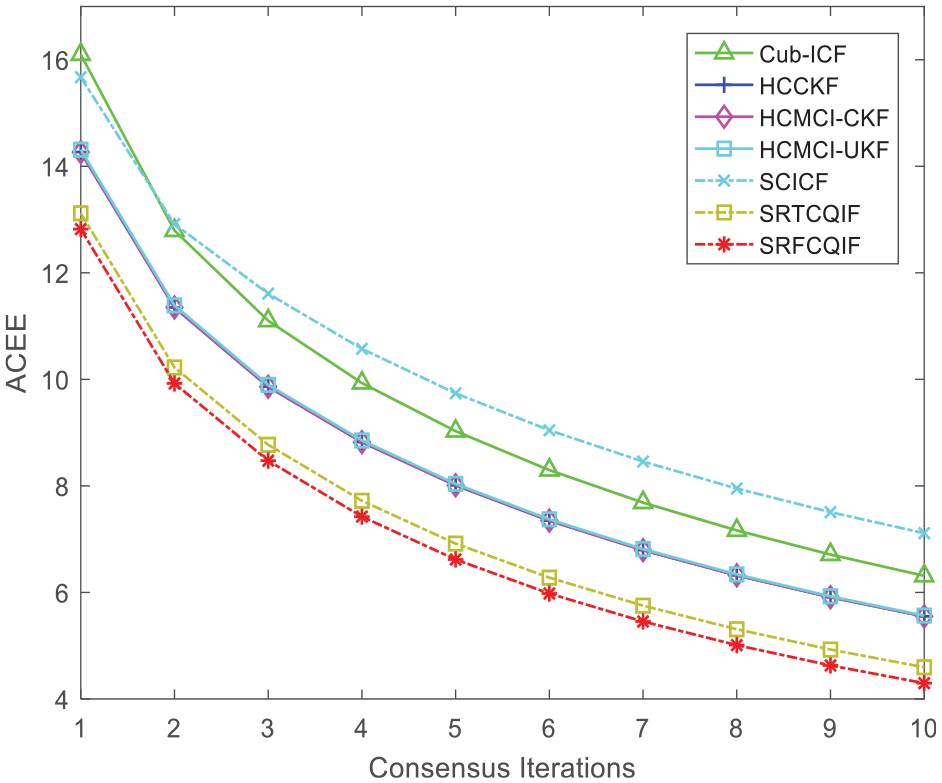
The ACEE with different consensus iterations.
The computational cost measured by average RT for all the algorithms is shown in Table 4. As higher cubature quadrature rules are exploited, more sampling points are required during the recursion of state estimation. Although it introduces extra computational burden on the system, the proposed SRFCQIF-HC possesses outstanding performance in the aspects of estimation accuracy, consistency of local estimates, and consensus on estimates across the entire sensor network.
Comparison of the running time for a single filtering step.
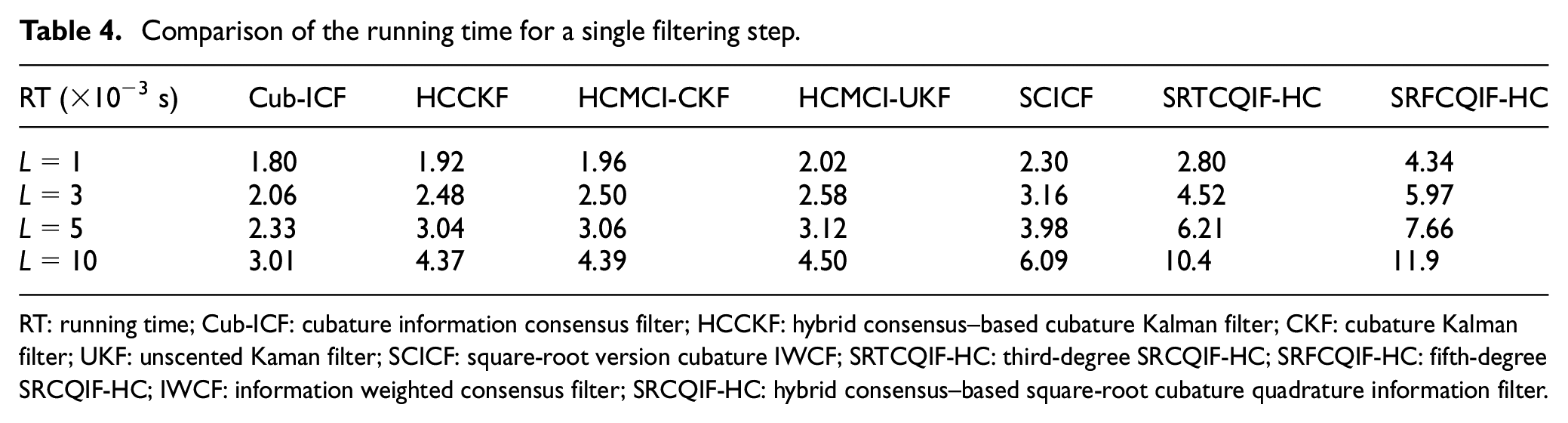
RT: running time; Cub-ICF: cubature information consensus filter; HCCKF: hybrid consensus–based cubature Kalman filter; CKF: cubature Kalman filter; UKF: unscented Kaman filter; SCICF: square-root version cubature IWCF; SRTCQIF-HC: third-degree SRCQIF-HC; SRFCQIF-HC: fifth-degree SRCQIF-HC; IWCF: information weighted consensus filter; SRCQIF-HC: hybrid consensus–based square-root cubature quadrature information filter.
Conclusion
In this article, to tackle nonlinear state estimation problems with networked sensors, a novel distributed SRCQIF-HC is proposed. The proposed SRCQIF-HC preserves the positive features, including consistency and accuracy, of both CI and CM algorithms and is mathematically equivalent to its centralized counterpart with resort to the novel measurement information update strategy presented in section “A novel Gaussian approximation information filtering paradigm.” Stability analysis with regard to consensus on local estimates, convergence to its centralized counterpart, and consistency is also developed. The simulation results indicate that the proposed SRCQIF-HC achieves an improved performance than the existing algorithms at the cost of a little more computational burden. Here, both the process and measurement noises are assumed to be Gaussian; in future work, we will extend the proposed algorithm to be applicable to nonlinear filtering under non-Gaussian process or measurement noises.
Footnotes
Appendix 1
Acknowledgements
The authors give their thanks to editors and the anonymous reviewers for the valuable comments and suggestions.
Handling Editor: Iftikhar Ahmad
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is jointly supported by the National Natural Science Foundation of China under grants 61471383, 91538201, 61531020, 61790550, 61671463, and 61790552.