
Abstract
This article addresses the problem related to the reliability of path after transmitting the given amount of data with the service-level agreement cooperation in the computer communication network. The links have associated with service performance factor parameter during the data transmission, and each node is associated with the requested service performance factor. In this article, first we have considered the single objective to minimize the transmission time of the quickest path problem. An algorithm for quickest path problem has been proposed for results, and furthermore, its time complexity has been shown. The problem has been extended with bi-objective optimization of the quickest path problem, which minimizes the transmission time and hybrid logarithmic reliability. An algorithm is proposed for getting the number of efficient solutions for the quickest path problem using label-correcting algorithm. The algorithms are implemented and tested on different standard benchmark network problems provided with the set of Pareto front of the results.
Keywords
Introduction
In the computer communication network (CCN), while data transmission occurs across the two specific ends, it takes time to transmit the data, which is the function of the two parameters, that is, delay occurred along the path and the capacity of the path. The applicability of these types of problem has been addressed in a number of examples; therefore, these types of problem in the networks gained attention by researchers and have been termed as quickest path problem (QPP). The QPP was pioneered by Chen and Chin 1 with the objective of designing a path with minimum transmission time in the directed network. But before this, the QPP was modelled by Moore 2 for the convey-type traffic problems. Later, the QPP model used to extend the single-path problem into a k-paths problem. Furthermore, the QPP model had been used to extend the model into bi-objective path problem by Martins and Dos Santos 3 and Pelegrın and Fernández. 4
To understand the concept of QPP, let us assume that CCN can be modelled as directed loopless CCN
Let us assume that a unit data
Using the application of circuit-switching mode, let us assume that data
The first part of equation (1) represents the delay occurred along the path


The above equations are self-sufficient to formulate the QPP

In general, the optimality of a path has a great influence on data transmitted along a path which is the general characteristic. If data traffic is very small, then transmission time mainly depends on the delay parameter which can be a good solution. If data traffic is extremely high, then the time taken for transmission is controlled by maximum capacity, where the path has to follow the maximum capacity of the path. In addition, it is worth to mention that QPP does not follow the principle of optimality of path such that if a path
In a previous study, Hamacher and Tjandra 9 proposed the evacuation model for the QPP with only a single path for evacuee. Several extensions of QPP have been made by researchers,10–16 to get the solution to the problem such as finding the k quickest paths. The computation of QPP by considering reliability not lower than the given threshold value has been proposed by Calvete et al. 5
In the CCN, the reliability got embedded with QPP and, therefore, proposes to model as a reliable QPP. In addition, due to the importance of reliability in the communication, the number of extensions has been made by the researchers Ruzika and Thiemann, 17 and Lin and colleagues18,19 proposed the QPP for the network. The proposal of Xue 20 has been extended by Calvete et al. 5 by setting the thresholding scheme for the reliability. In correspondence with the increased demand, data transmission services require a network to be predictable, that is, quick and reliable.
While formulating QPP, no attention is paid to the uncertainties associated with the network such as man-made disasters, natural disasters and Tsunamis. It was thought that the data transmission occurs without any failures along the
To counter the failures with QPP, the link reliability

In present times, due to the huge integrity of applications, the scarcity of network resources leads to imposing the service-level agreements (SLAs) on the data transmission or service.22–24 These SLAs are the prime factor for the consideration of data transmission along the
In addition, it is worth full to mention that the proposed model is the only extension of QPP in terms of constrained QPP with the same time complexity.
However, as an evaluation of system reliability is a non-deterministic polynomial-time (NP)-hard problem, the problem remains interesting to the researchers, and in literature, it has been seen that it is not self-sufficient to restrict only single-objective QPP.28–30
For better understanding between existing algorithm and proposed algorithm, a qualitative comparison study has been presented in Table 1.
Comparison of different existed algorithms with the proposed algorithm.
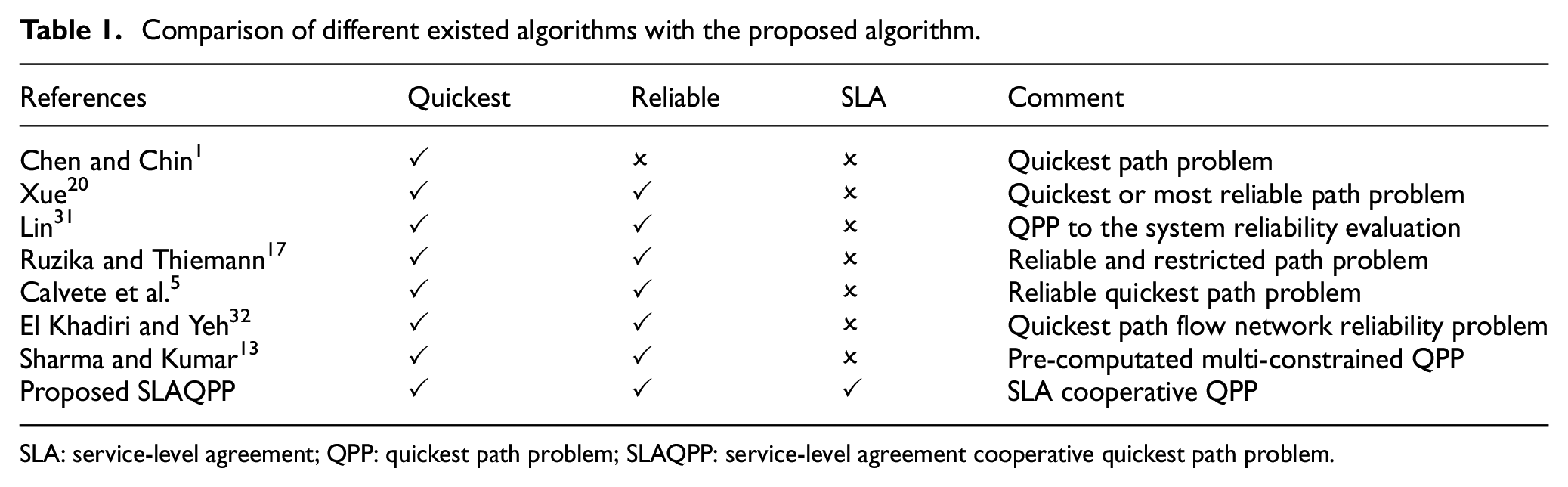
SLA: service-level agreement; QPP: quickest path problem; SLAQPP: service-level agreement cooperative quickest path problem.
The aforementioned comparative study shows that the proposed algorithm outperforms with existing algorithms and considering all the performance parameters for the computation of path for data transmission.
Nowadays, the applications are good indicative and shows the necessity of two or more objective,33–35 other than of single objective. Some of the examples of the bi-objective problem to find the efficient solutions are transportation problem,36–38 supply chain problem,39,40 assignment problem,41,42 travelling and salesman problem,43–45 cargo loading and unloading,46–48 defence machineries 49 and healthcare. 50
Therefore, we have addressed the bi-objective SLAQPP, that is, (BSLAQPP) where transmission time and hybrid logarithmic reliability are minimized. An algorithm has been developed to find the efficient set of paths based on solving the bi-objective shortest path problems (SPPs).
A solution of the bi-objective problem can provide the non-dominated path with minimum delay and maximum capacity. We have considered the bi-objective shortest path (BSP) problem 51 which is the extension of the single-objective SPP. This extension comes under the category of multiple-objective combinatorial optimizations (MOCOs). 52 In BSP, the aim is to find the number of efficient solutions for the problem. Since BSP problem is an NP-hard problem 53 and intractable as the number of the efficient solution may get exponential variation with small change in the number of nodes but, for the practical application, it is acceptable to get a finite number of efficient solution. In this article, it has been considered that for mission-critical applications, such as, remote surgeries, E-healthcare, E-banking and E-shopping, 26 mainly two objectives as minimum transmission time and hybrid logarithmic reliability of service are required. Therefore, the problem is formulated as a BSLAQPP.
Contribution
The main contribution of the proposed work can be seen as follows:
The main contribution can be highlighted, as authors have proposed a single-objective optimization model for data transmission with minimum transmission time by considering the SLAs for critical services. The SLA consideration guarantees the successful data transmission within requested service time.
In the proposed work, the authors have also extended single objective to bi-objective to minimize the transmission time and hybrid logarithmic reliability using bi-objective optimization. Using bi-objective optimization, both objectives have been used to find the path for data transmission which is a favourable case for critical services.
So far, many researchers have studied the minimum transmission time problem, but the inclusion of SLA and proposed bi-objective optimization algorithm makes this approach unique.
The qualitative and quantitative comparative study shows that the proposed algorithm is outperforming with all other existing models with consideration of SLAs.
Another major contribution of the proposed model is that the mathematical model can be further extended for the different application with bi-objective optimization such as healthcare critical routing and goods carriers routing.
Organization
This article is structured into six sections – section ‘Proposed system model’ is used to explain the proposed system model for SLAQPP. Theoretical results have been discussed in section ‘Theoretical results’, and an algorithm has been proposed in section ‘SLAQPP algorithm and complexity’. An extension of SLAQPP in terms of BSLAQPP has been proposed in section ‘The BSLAQPP’. Section ‘Simulation results and discussion’ has been used to explain the simulation results and discussion. The conclusion has been presented in section ‘Conclusion and future work’.
Proposed system model
In the CCN, the performance of data transmission has a great influence on the quality of service (QoS).
54
The QoS of a network depends on several parameters, such as link capacity
Mapping of SLAs
As the service expectations are stringent in mission-critical applications,
56
the SLAs are drawn between service providers (SPs) and users in various terms depending on the services.
57
Here, the problem is considered for the data transmissions, so SLAs are drawn in terms of requested service time
In the CCN, the allowed time for the completion of services is very minute, approximately seconds
Each node is endowed with requested service performance factor (RSPF) denoted as

SPF
In the CCN, the performance of data transmission is not affected only by the link reliability

The SPF for a path

Using the properties of exponentials, equation (8) is modified as
To design the SLAQPP system model, let us assume that for data
In this model, to satisfy SLA, the SPF has to be more than that of the RSPF and the remaining value is termed as the residual requested service performance factor (RRSPF) symbolized by

From equation (10), if link

Remark
The capacity of path
A diagram is shown in Figure 1 to show the framework of the link model with the link reliability

The total hybrid reliability of a link.
The total hybrid reliability of a link

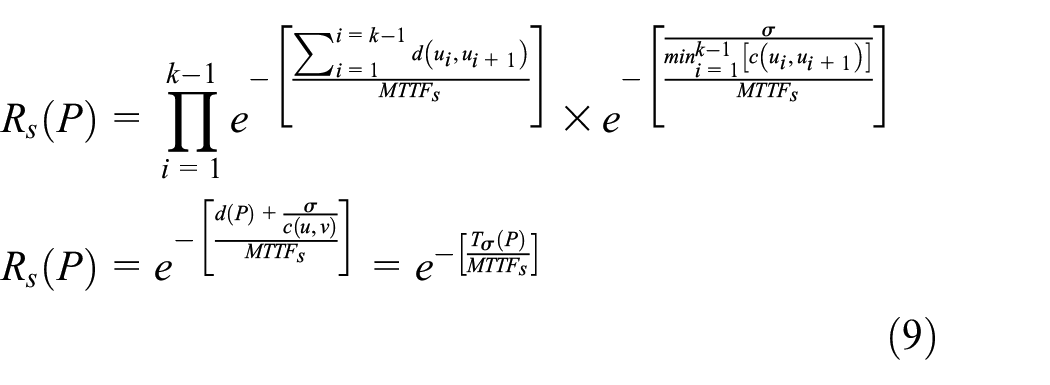
The total path reliability


Model of computation of total hybrid reliability of the path.
Furthermore, total hybrid path reliability
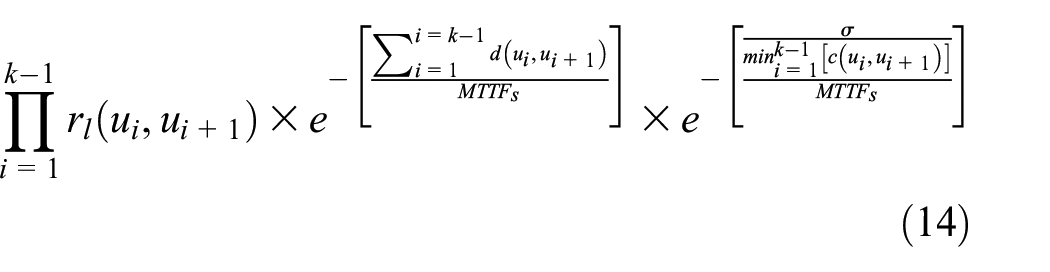
The RRSPF that is,
In order to get the SLA cooperative

The SLA cooperation on the data transmission allows us to propose an algorithm based on the RSPF which helps us to develop an algorithm based on the SPP in sub-networks
Theoretical results
In general, let us assume that a network

Equation (17) is associated with the label of minimum SLA cooperative capacity of the link
A CCN is divided into different sub-networks

Lemma 1
A path
Proof
If path

Lemma 2
Let path
Proof
From the definition of Lemma 1, the path

Therefore, if
Now, here it is essential to point out that for an
Lemma 3
Let a path
Proof
Let path

Thus, the path
Theorem 1
Let path
Proof
Since, the path

SLAQPP algorithm and complexity
Algorithm for SLAQPP

Complexity analysis
The complexity of SLAQPP is given as in Theorem 2.
Theorem 2
By performing the time complexity analysis on SLAQPP, the proposed algorithm has the time complexity of
Proof
The flow in computation of SLAQPP algorithm has been explained as follows in different steps. In the first step of simulation, that is, STEP0, all the input variables are defined. After defining the input variables, all the sub-networks are taken out after satisfying SLA constraint in STEP1. All these sub-networks are taken out after the satisfaction of SLA constraint for different link capacities present in the network. In STEP2, SPP is used to compute path with minimum cost for different sub-networks with the help of Dijkastra’s algorithm. The SPP computes the minimum cost path with time complexity of
The BSLAQPP
As the name suggests that, the objective of the problem is not only to minimize the transmission time but also come up with the objective of maximizing the hybrid reliability of the path. Therefore, the problem of finding the path for both objectives has been designed as the minimization problem. Here, we have used a negative logarithm to the hybrid reliability and this term is known as hybrid logarithmic reliability. From the discussion of SLAQPP model, every link in the network

The MOCO problems are the NP-hard problem to get the single optimized values of each objective simultaneously and can be studied with different application perspectives. In this article, the main objective is to construct the Pareto front of the set of efficient solutions. Let us dictate some definitions to understand the basis for the BSLAQPP model.
Definitions
Definitions – 1
The set
Let, if
The bi-objective optimization problem is given as

This image set is called criterion space. Criterion values are selected from criterion space.
Definitions – 2
Consider the bi-criterion optimization problem of the type

For the feasible solution set X, the solution image is mapped as
There is no other
Furthermore, if
If
The collection of all efficient solution as called an efficient set, denoted by
Definitions – 3
The solutions that cannot be improved in any of the objectives without de-regarding at least one of the other objectives is called as Pareto solution. Mathematically, a feasible solution
Any solution
Definitions – 4
A feasible set of solutions of the path
Where one condition to follow the one strict inequality.
Definitions – 5
The image
We know that a complete set of efficient solution is a set of efficient solutions, given by
Definitions – 6
The two feasible solutions
If images of two feasible solutions along the path
In bi-objective QPP, the target is to obtain the efficient solutions. Such type of problems are NP-hard problems and also intractable. In this situation, the total number of efficient solutions may be very large; hence, it is a difficult task.
The constraints on the SPF of link reliability can be converted into additive form by making use of logarithmic function as follows


where
Now, we can define the parameter

As a consequence, a path
Theorem 3
Let

Proof
The path
and

The aforementioned equations contradict the theorem statement that the path
In the first part of our proposed BSLAQPP algorithm, we will apply a bi-objective label-correcting method. 51 The bi-objective problem is the simple extension of the single-objective problem. The main difference in this bi-objective problem is that a label contains two labels where these labels do not dominate one another. The merging has been done for the testing of dominance process and this process somewhat more classy and expensive. To reduce this constrained bi-objective problem has been proposed here. Based on Theorem 3, a BSLAQPP algorithm is proposed as follows:

Simulation results and discussion
Experimental setup
The experimental results are performed on a desktop having processor of Intel(R) CoreTM i5–7400, CPU@ 3.00 GHz, 8-GB RAM, and Windows 10 operating system in MATLAB 2013a. The SLAMRQ involves the Dijkstra’s algorithm which is solvable in polynomial time. To conduct the simulation experiment, values of the capacities in

Benchmark topology.

14-NSFNET topology.
The SLAQPP performance evaluation
The performance evaluation for the SLAQPP has been given by performing simulations on two different standard topologies as shown below in Figures 3 and 4:
The step-wise explanation for the proposed SLAQPP algorithm has been given as below:
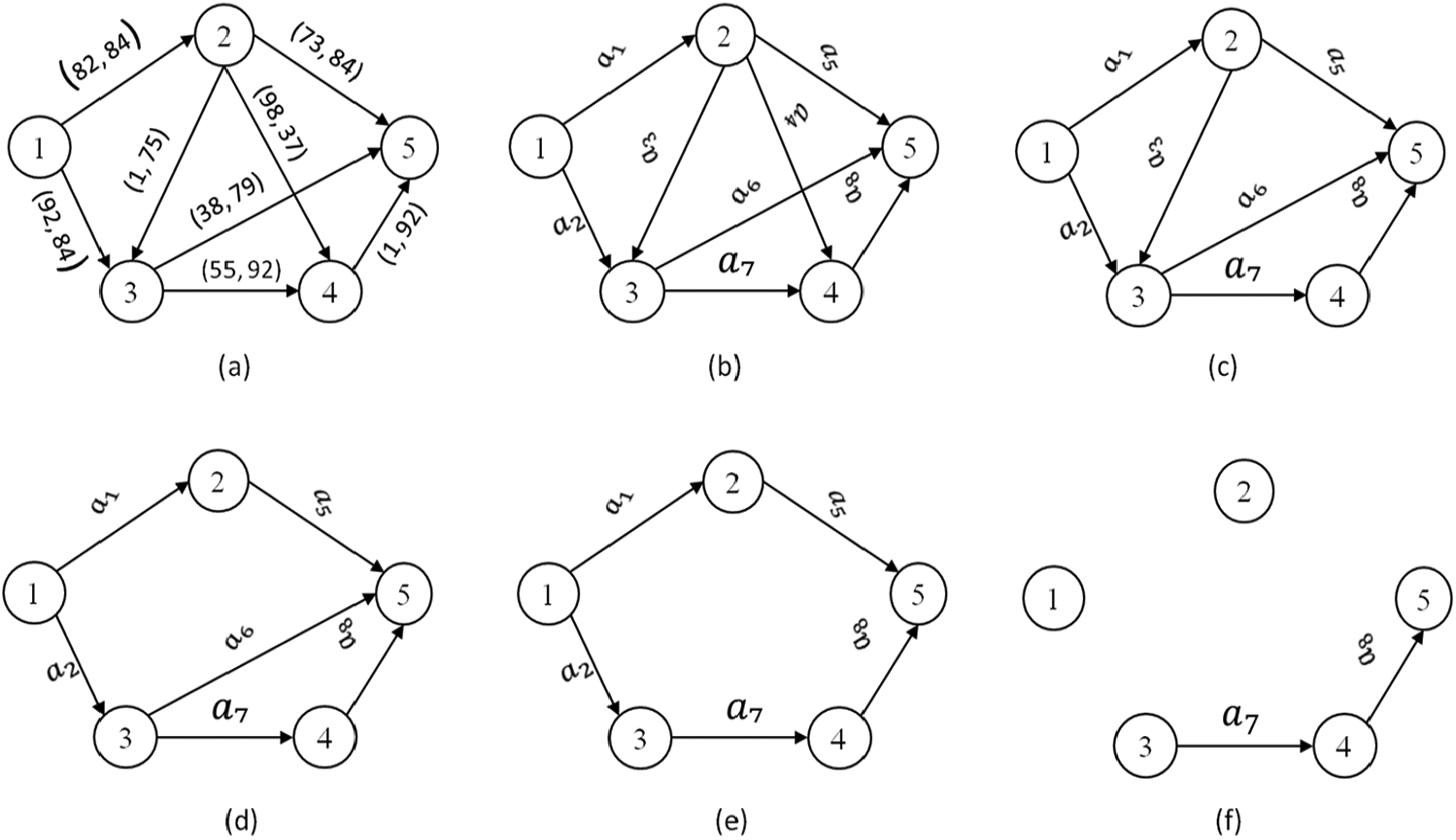
For the STEP0, all input variables have been declared. In Table 2, the values of reliability, capacity and delay of each link associated with each link have been shown for the topology shown in Figure 3. Data of
The 3-tuple values of

In STEP1, the number of different capacities present in the given topology is equal to three; therefore, the network is divided into three different sub-networks after satisfying the SLA constraint. The simulation results of SLAQPP for the topology shown in Figure 3 are dictated in Table 3.
Results of the SLAQPP for the benchmark topology.

SLAQPP: service-level agreement cooperative quickest path problem.
Using STEP2, the SPP algorithm with delay time as a cost function found only two paths for first two sub-networks as
Furthermore, SLAQPP also simulated for 14-node NSFNET as shown in Figure 4 with 21 links, and their respected values of reliability, capacity and delay are shown in Table 4. The numbers of different capacities present in the network are equal to 11. The simulation results of SLAQPP for the 14-NSFNET are shown in Table 5.
The 3-tuple values of

NSFNET: National Science Foundation Network.
Results of the SLAQPP for the 14-node NSFNET topology.

SLAQPP: service-level agreement cooperative quickest path problem; NSFNET: National Science Foundation Network.
There are only five paths which are capable to perform SLAQPP, and the path
The simulations of SLAQPP for both standard topologies show that as the different capacities in the network are increased, the possibilities of getting different sets of
The BSLAQPP performance evaluation
The simulation results for the BSLAQPP have been shown on the two different standard topologies benchmark and 14-node NSFNET as shown in Figures 3 and 4, respectively.
The step-wise explanation for the proposed BSLAQPP algorithm has been given as follows:
In STEP0, all the input variables have been declared. The different values used for the simulation of BSLAQPP for the benchmark topology have been shown in Table 6. Data of
Using STEP1, the number of different capacities are present in the given network are five; therefore, there are five different sub-networks sorted according to different capacities, 10, 20, 30, 40 and 50 Mbps for the BSLAQPP. The SLA cooperative links for the each sorted sub-network has been shown below in Figure 5(b)–(f).
In STEP2, the BSLAQPP simulations for the given topology using label-correcting method
51
are shown in Table 7. Using STEP3, the bi-objective minimization for the path
The 3-tuple values of

BSLAQPP: bi-objective service-level agreement cooperative quickest path problem.
(a) On the links
Path selection for the benchmark topology using the BSLAQPP.

BSLAQPP: bi-objective service-level agreement cooperative quickest path problem.
The Pareto solution distribution has shown in Figure 6 for the BSLAQPP results shows that the path

Pareto solution of the benchmark network for the simulations of BSLAQPP.
It is worth pointing out that it is not necessary that a feasible

The network
The simulation results of the BSLAQPP for the standard topology 14-nodes NSFNET have been shown in Table 8.
Path Selection for the 14-node NSFNET topology using BSLAQPP.

BSLAQPP: bi-objective service-level agreement cooperative quickest path problem; NSFNET: National Science Foundation Network.
There are 11 different capacities present and, therefore, network has been divided into 11 different sub-networks. The number of BSLAQPP paths are less than or equal to the number of different capacities. Here, only five capacities are capable of providing BSLAQPP an

Pareto solutions of the 14-node NSFNET for the simulations of BSLAQPP.
The path
The Pareto solution helps us to find the optimal path with two parameters, as one can see a path
The proposed BSLAQPP algorithm has certain applications in different research areas listed as follows with constraints comparable to our proposed BSLAQPP model (Table 9).
List of different applications with objectives.

In ambulance routing, the first objective is minimum time between accident and hospital location and second objective is minimum gridlock probability. Failure to one of these objectives at any time can lead to the loss of patient. Both objectives are needed to be minimized at the same time; hence, the proposed bi-objective theoretical model can be adopted here with little modification in mathematical models.
For another application such as critical healthcare over a network, where reliability of path should be maximum and service lag time should be as minimum as possible. As we are considering critical healthcare application, both objectives need to be satisfied at the same time. Failure to any one of the objectives may lead to severe consequences in terms of life loss. In practical real-time applications, there are a number of applications with a tremendous need of such type of models to support these applications.
Comparative remarks
For the comparative study, we have adopted three existing algorithms Chen and Chin,
1
Calvete and colleagues,5,16 and compared with proposed algorithm to transmit
In Chen and Chin,
1
the algorithm gives the path
In case of Calvete et al.,
5
the algorithm is again able to compute the path
In case of Calvete et al.,
16
the algorithm is again able to compute the path
In the proposed algorithm, the computed path is able to comment on SLA as well as reliability of the path (Table 10). The energy consideration has not been considered in this case and can be computed in future works.
Qualitative comparison of the existing algorithms with proposed SLAQPP algorithm.

SLAQPP: service-level agreement cooperative quickest path problem; SLA: service-level agreement.
Conclusion and future work
In this article, a theoretical model of BSLAQPP has been introduced which is a variant of QPP with the constraints of SLAs. As QPP simulation has been carried out by taking the delay as a cost function, in this article, before using this property of QPP, SLA cooperation over the links has been made. The consideration of SLA is useful for the successful completion of data transmission which is useful for the critical services. A polynomial time algorithm proposed for the SLAQPP simulation with the same time complexity. Furthermore, simulations have been extended for the bi-objective QPP with the objective of minimization in transmission time and hybrid logarithmic reliability. The BSLAQPP presents the Pareto front to find the feasible solution from the complete set of efficient paths. The results show its usefulness where the necessity of equal consideration of both objects is required. These theoretical models can be further extended with practical applications where both these objectives are strictly required. In the future works, these results will be expanded for the large networks, standard road networks and with the certain applications such as ambulance routing, goods carriers routing, school bus routing and critical healthcare. In addition, this problem can be modelled for the multi-objective QPP with different constraints like risk, energy, vulnerability and sensitivity.
Footnotes
Acknowledgements
We would like to thank the University of Sharjah, Dubai Electronic Security Center (DESC) and OpenUAE Research and Development Group for funding this research study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part from the research project titled, ‘Reliability Modeling and Optimized Planning of Risk-based Resilient Networks’ sponsored by the Indo-Polish Programme (grant no. DST/INT/POL/P-04/2014).