
Abstract
A group of collaborative nodes can efficiently complete spatial long-distance transmission tasks using beamforming technology. However, a high sidelobe level interferes with communication quality, and uneven energy consumption of nodes affects network lifetime. This paper proposes an energy-efficient collaborative transmission algorithm based on potential game theory for beamforming. First, the minimum number of cooperative nodes is determined in accordance with the energy consumption and spacing limitation condition. A group of nodes satisfying the node spacing condition is selected as cooperative nodes based on the ring array to minimize communication interference among nodes. Second, a potential game model is proposed as a joint method for optimizing the collaborative parameters of the cooperative nodes and their energy consumption balancing features. Finally, the game process is continuously executed until the Nash equilibrium is reached. According to simulation results, the sidelobe level caused by the cooperative nodes is reduced and the transmission conflicts are lessened. Thus, the quality of communication links in between nodes in the network is improved. Energy efficiency is also promoted because a balancing of energy consumption is involved in the proposed potential game model, and network lifetime is effectively prolonged accordingly.
Keywords
Introduction
The research on the Internet of Things has entered a stage of rapid development. Wireless sensor networks (WSNs) are among the basic technologies used in the field of Internet of Things, 1 particularly to monitor and digitize the physical world effectively. To achieve the monitoring task, a large number of sensor nodes are scattered in a wide area to collect, integrate, and transmit perception data. 2 In extreme monitoring conditions, the data are transmitted to a fixed base station (BS) in one-hop or multi-hop transmission pattern, in which the “energy hole” problem cannot be avoided or solved. Most sensor nodes use non-rechargeable batteries as energy sources, and replenishing node’s energy after deployment is difficult. 3 If the energy of some nodes is exhausted, then the created “energy hole” will hinder the network to provide services. 4 Therefore, knowing how to solve the problem of unbalanced node energy consumption has been the focus of research in recent years. Compared with fixed BS data collection, spatial data collection is advantageous in several aspects, such as multi-angle, real-time, and dynamic processing.5,6 Unmanned aerial vehicles (UAVs) are usually used for spatial data collection in a monitoring area.7–9 In smart ocean strategy, majority of sensor nodes are deployed to complete the marine information collection and transmission system.10,11 Multi-hop communication is usually used to complete the task of long-distance data transmission, but this scheme will cause problems of excessive transmission delay and unbalanced node energy consumption. Beamforming technology12,13 can achieve long-distance collaborative transmission tasks, and effectively solve the problems faced by multi-hop communication.
Beamforming technology uses a group of cooperative nodes to form a virtual node antenna array, and the data are transmitted from the cooperative nodes to the target BS. In directional collaborative transmission through beamforming, not only the communication range of the nodes will be expanded, but the energy consumption of these nodes will also be reduced. However, the position error of cooperative nodes exerts considerable influence on the mainlobe and the sidelobe of a beam pattern due to the random deployment of sensor nodes; the influence on the mainlobe will weaken when the number of cooperative nodes is increased, but sidelobe performance will remain closely related to position error. 14 Meanwhile, numerous cooperative nodes participating in collaborative transmission will increase energy consumption and shorten network lifetime. Selection of cooperative nodes is a key issue in beamforming. Many scholars have applied traditional optimization algorithms (e.g. genetic algorithm (GA), 15 particle swarm optimization (PSO) algorithm, 16 and evolutionary algorithm (EA)17,18) to the beamforming technology, and the only aim is to solve communication interference problem in collaborative transmission. To extend the network lifetime, it is also necessary to optimize the energy consumption of each node participating in the collaboration transmission process, which implies the need to jointly optimize the communication quality and energy consumption of nodes. Each participating node needs to maximize its benefits as well as the objective function, and the game theory is suitable to solve the above optimization problem.19,20 Based on the preceding analysis, this study proposes an energy-efficient collaborative transmission algorithm based on potential game theory for beamforming (EECT-PGB) to efficiently achieve long-distance collaborative transmission. The main contributions of this study are as follows:
The minimum number of cooperative nodes participating in collaborative transmission is determined based on the node’s transmission distance and energy consumption for reducing the network energy consumption. Then, according to the nature of the array spacing in random antenna arrays, a node location selection method for random sensor nodes based on the ring antenna array is proposed.
A potential game model based on collaborative transmission is constructed, in which energy consumption and sidelobe level (SLL) are used as the parameters of utility function. Cooperative nodes jointly optimize node energy and maximum SLL through dynamic game execution until the Nash equilibrium is reached.
The proposed algorithm is suitable for the scene of large-scale network and long-distance data transmission. Simulation results testify that the proposed algorithm has good performance in energy consumption, transmission delay, and link quality.
The remainder of this paper is organized as follows. Section “Related work” presents in detail the related work. Section “System model” describes the system models used in this study, and Section “Problem formulation and model construction” formulates the problem to be solved and constructs a potential game model which is proved to be an ordinal potential game model. Section “Details of EECT-PGB algorithm” introduces the implementation process of EECT-PGB. Section “Simulation results and analysis” presents some simulation experiments. Section “Conclusion” concludes the study.
Related work
In the collaborative transmission process, establishing high-quality communication links by suppressing the sidelobe and improving the energy efficiency of cooperative nodes have become popular issues in recent years. Some scholars have proposed node selection and optimization algorithms to suppress the sidelobe by analyzing the influences of different node position combinations on the sidelobe performance of beams. In Ahmed and Vorobyov, 21 a node selection algorithm with low-rate feedback to select different node combinations is proposed. The control of the sidelobe in different node combinations is analyzed according to the required average number of search experiments, resulting interference, and the corresponding transmission rate in the cooperative node selection process. Then, on the basis of the above algorithm, 21 another algorithm using distributed cross-entropy optimization (CEO) 22 to search for different node combinations is proposed. Compared with the algorithm in Ahmed and Vorobyov, 21 the CEO algorithm can rapidly obtain an optimal node combination to suppress the sidelobe. However, the above two algorithms update the selection nodes continuously, and the number of iterations increases accordingly, thereby causing the cooperative nodes to consume considerable energy. In Malik et al., 23 a virtual circular node selection method is proposed to improve beam performance in distributed beamforming using the hybrid least-square speedy particle swarm optimization (HLPSO) algorithm. Circular collaborative beamforming implements two objectives, namely, sidelobe suppression and first null beam width. Similarly, in Sun et al., 24 a novel collaborative communication method is presented based on node selection optimization algorithm (NSOA). The optimal virtual nodes position on the ring is calculated by the NSOA, and then the nodes closest to the virtual position are selected from the candidate nodes set to form a ring array, but an error exist in between the real node location and the virtual node location, which weakens the performance of the beam. In Chatterjee et al., 25 a PSO algorithm based on the time-varying maximum velocity is proposed for beams irrespective of direction in the vertical plane of concentric loop antennas. In this scheme, the beams have the minimum SLL while maintaining the first null beam width. In Chen et al., 26 a node selection algorithm based on uniform spatial linear array synthesis is proposed, and the node selection for collaborative beamforming is optimized with GA. In the above four works (i.e. in Malik et al., 23 Sun et al., 24 Chatterjee et al., 25 and Chen et al. 26 ), the intelligent optimization algorithm is used to select the cooperative nodes for suppressing the sidelobe. Nevertheless, the extra energy consumption will shorten network lifetime. Given that the four algorithms have not considered the influence of node position on the sidelobe, the effect of the optimization result is limited. In Zarifi et al., 27 a collaborative null steering beamformer is presented. The algorithm is suitable for a large number of cooperative nodes participating in transmission. In Singh and Salgotra, 28 flower pollination algorithm (FPA) is employed to select the best node set in the linear antenna array (LAA) for reducing the maximum SLL and controlling the position of the nulling in the beam patterns. However, in actual situations, interference direction is unknown. This scenario implies that reducing all sidelobes is more effective than focusing on a certain direction.
From the perspective of energy efficiency, some beamforming algorithms are constructed for extending the network lifetime. In Feng et al., 29 the energy holes is avoided by assigning the nodes in turns to balance the energy consumption for collaborative beamforming over the whole network. In Du et al., 30 the nodes are charged with wireless energy transfer (WET) and an efficient data routing is designed to realize immortal WSNs. However, the beam is not optimized in the literatures,29,30 which results in higher communication interference in the network and weakens the communication quality. In wireless power transmission (WPT), beam collection efficiency is considered to improve the performance of the power beam. In Shen et al., 31 an improved chicken swarm optimization (ICSO) algorithm is proposed for SLL suppression in the planar antenna arrays (PAA). The ICSO algorithm reduces the maximum SLL of the power patterns by selecting the appropriate excitation current. However, energy radiation capacity of the power beam is improved without considering the energy cost of each node. In Li et al., 32 a PSO-based optimization algorithm for WPT is presented. The improvement of the energy collection efficiency in the power pattern is achieved by optimizing the node spacing, but the node weight is not optimal.
Single objective function optimization limits the overall performance of the algorithm. Therefore, the joint optimization schemes for node selection and energy consumption is proposed in some literatures, particularly using the energy consumption of nodes as a reference factor of the node selection optimization process. In Sun et al., 33 an array node selection algorithm for collaborative beamforming in WSNs is proposed. A random node selection method based on concentric circular antenna array is introduced to reduce the energy consumption of nodes. Some nodes with in-between distance of more than 2.5 times the wavelength are selected as cooperative nodes to participate in beamforming. However, in the process of cooperative nodes selection, the remaining energy of the nodes is ignored, and this parameter influences network lifetime.
The preceding analysis on suppressing SLL using different node selection algorithms indicates reduced interference in unintended directions. Moreover, few studies have considered the joint optimization of the beam’s SLL and the network’s balanced energy consumption. In this study, a joint optimization method for SLL and node energy based on potential game theory is proposed to simultaneously ensure the quality of link communication and the balance of energy consumption of nodes in WSNs, and the network lifetime can be prolonged reasonably.
System model
Network model
All nodes participating in beamforming in the WSNs are assumed to be randomly distributed in a circular area under stationary state. The node becomes the new data source node and set as the origin when it needs to send data packet. The communication radius of the data source node is ρ and the distance from the source node to the target BS is dt. Therefore, the network model used in this study is as follows:
Target BS distance dt >> ρ.
Each node has the same initial energy and the maximum transmit power, and the power of each node can be adjusted.
Each node has a unique ID.
Each node uses an omnidirectional antenna, and no scattering or reflection of the channel occurs between the node and the target BS.
The node density is high enough to guarantee that network is connected.
Energy consumption model and node power model
The energy consumption of the sensor nodes is primarily derived from the transmitting and receiving energy consumptions, and therefore, other energy consumptions of the nodes are ignored in this energy consumption model. The following equations formalize the energy consumption of transmitting and receiving


where Eelec represents the energy consumption during the transmission and reception of a unit length data; d is the transmission distance between the data source and the target; d0 is the threshold; εfs and εamp represents the amplifier power consumptions of the free-space model and the multi-path attenuation model, respectively; and l is the length of data transmitted or received, that is, the number of bits. When the distance d between the transmitting and receiving nodes is less than the energy consumption model threshold d0, the free-space model is adopted, and the transmit power is attenuated as d2. Otherwise, the multi-path attenuation model is adopted, and the transmission power is specified as d4.
The calculation formula of the transmitted power and the received power in the free-space model is

where Pr is the received power, Pt is the transmit power, G is the gain of the transmit antenna, G0 is the gain of the receive antenna, d is the distance from the transmitter to the receiver, and λ is the wavelength of the carrier.
Problem formulation and model construction
Problem formulation
The data source node determines the neighbor nodes set according to the communication radius ρ, supposing N neighbor nodes exist around the data source node, and the polar coordinates are established with the data source node as the origin. The beam pattern of node collaborative transmission is shown in Figure 1.

Beam pattern of cooperative nodes in the collaborative transmission.
Some notions should be defined clearly as follows. The polar coordinates of the neighbor nodes participating in the long-distance transmission are (r, ψ), where r = [r1, r2, …, rk, …, rN] ∈ [0, ρ]; ψ = [ψ1, ψ2, …, ψN] ∈ [−π, π]; the spherical coordinates of the target BS are (A, θ0, ϕ0); A is the distance from the data source node to the BS; θ is the elevation angle; ϕ is the azimuth, that is, the main direction angle of the BS, where θ ∈ [0, π] and φ ∈ [−π, π]. The Euclidean distance from the kth node to the reference location (A, θ, φ) in collaborative transmission can be defined as

The signals transmitted by all the nodes participating in the beamforming arrive at the target BS and are phase synchronized, 34 thereby, reducing the error caused by the electromagnetic wave coherent superposition. The initial phase Ψk of the node k ∈ {1, 2, 3, …, N} is

In this study, the problem will be analyzed from the x–y plane. We let θ = π/2 because A >> rk. Equation (4) can be expressed as

Therefore, the array factor (AF) of the antenna array composed of N nodes is

where N is the number of selected nodes, W is all of nodes’ weight in the beam pattern, and wk is the kth node’s power weight. Thus, the normalized peak SLL is

where, φSL is the direction angle of the sidelobe, and φML is the direction angle of the mainlobe. The sidelobe size is measured by normalized peak SLL.
If the value of each wk is equal to 1, and the initial phase is computed with equation (5), then the mainlobe beam points accurately to the intended target BS with the AF (equation (7)). However, the sidelobe size is uncertain, and large sidelobe size will cause extra energy consumption. Hence, the SLL should be suppressed. The weight of each node in beamforming should be optimized to suppress the sidelobe size and reduce the SLL. The weight W, which is related to the transmit power, can be expressed as

In the long-distance collaborative transmission task, through beamforming technology, the energy consumption can be balanced by adjusting the transmit power of each node participating in the collaborative transmission. The problem solved in this study is to jointly obtain a set of optimal transmit power pi to suppress the SLL while balancing energy consumption.
Constructing potential game model
Beamforming technology is used to for nodes to accomplish the collaborative transmission task, which mainly faces several problems, that is, how to extend network lifetime by reducing the energy consumption of the cooperative nodes, and how to improve the quality of the communication link by reducing the SLL of the antenna array. To solve the above problems, game theory is employed in the EECT-PGB algorithm to achieve collaborative transmission efficiently. The utility function is constructed by the energy consumption of the node and the SLL of the antenna array. When the utility function reaches the maximum value, the optimization of the energy consumption of the node and the SLL of the antenna can be realized jointly.
The sensor nodes are assumed to be evenly distributed in the monitoring area, the data source nodes set in WSNs are S = {i/i = 1, 2, …, Nsource}, and the neighbor nodes set is Ncandidate = {j/j = 1, 2, …, Nneighbor}. The set of cooperative nodes participating in the collaborative transmission is Cbeam = {k/k = 1, 2, …, Nbeam}. Strategy game I can be presented as a three tuple,
In the above three tuples, the utility function represents the trade-off between the benefit and cost of each candidate cooperative node participating in collaborative transmission. Therefore, for each candidate node, its utility function can be defined as

where fk denotes the benefit function of the node k performing the behavior ak, that is, the benefit of the candidate cooperative node k participating in collaborative transmission. gk denotes the cost function of the node k performing the behavior ak, that is, the cost of the candidate cooperative node k participating in collaborative transmission. fk and gk are, respectively, represented as


where E0(k) is the initial energy of node k. Er(k) is the residual energy of node k.
The function Hk can be used as an evaluation function to evaluate the effects of candidate cooperative nodes on the transmission gain. The function Hk can be expressed as

where Pr(dij) denotes the received power of node j that receives the data of node i, and µ denotes the interrupt rate. The communication link is unobstructed only the received power is greater than the interrupt rate, otherwise, node i and node j cannot establish a connection.
Potential game model analysis
If strategy game

Function U is the ordinal potential function (OPF) of the game I.
Theorem
If the strategy game
A strategy combination that satisfies the Nash equilibrium in the game can be obtained by calculating the maximum value of the OPF.
The strategy game is an OPG, then the OPF can be constructed as follows
Proof
According to the utility function defined by equation (10), for any cooperative node k ∈ N, then, qk ∈ Ak and

The deviation is derived in the OPF equation (15) as follows

Two cases with Δu and ΔU exist, that is,
Hk ∈ {0, 1}; the first case
The second case

According to equations (17), (19), and (20), when
Details of EECT-PGB algorithm
The EECT-PGB algorithm, which consists of four phases, completes a joint optimization of energy consumption and the SLL of the antenna array. The first phase is to determine the cooperative nodes set, the second phase is the game execution, the third phase is the cooperative nodes collaborative transmission, and the fourth phase is the update maintenance process.
Selection process for cooperative nodes
Each of monitoring nodes will be set as the data source node Snode when it sends data to the target BS. The coordinates of the data source node and the target BS are shown in Figure 1. To form an efficient beam, a group of cooperative nodes should be selected from the neighbor nodes set of the source node Snode to form a virtual node antenna array, and the data will be transmitted from the cooperative nodes to the target BS with cooperative beamforming technology. First, the minimum number of cooperative nodes should be determined. Second, the cooperative nodes should be selected from the neighbor nodes set. The coordinates of the source node Snode are (xs_node, ys_node), and the coordinates of the target BS are (xbase, ybase); thus, the distance from the source node to the target BS is

Given dt >> ρ, the distance from the neighbor nodes of the source node to the target BS is approximately dt. Based on equation (1), Etransmit is defined as the energy consumption for transmitting data

According to the characteristics of electromagnetic wave coherent superposition, N nodes transmit data to the target BS with the same power. N2 gain will exist in the direction of the target BS, then the transmit power can reduce to 1/N2 for each node. Therefore, the energy consumption for each node transmits one-bit data equal to Etransmit/N2. Based on equation (1), the energy consumed by the N nodes to transmit l bit data using beamforming technology is

Further, the energy consumption that the source node sending l bit data to N cooperative nodes and the cooperative node receiving such data is

where dmax represents the maximum distance that the node transmits a data packet with the maximum transmit power. The total energy consumption is as follows

The source node will send control packets to the cooperative nodes before the data transmission phase. Transmitting control packets will also consume energy, but the length of the control packet is much smaller than that of the data packet; hence, the energy consumption of control packet will be neglected in this study.
In equation (25), considering N is an unknown quantity, we let the derivative of N be 0, and the optimal value of N can be obtained as


where Nenergy_min is the optimal number of cooperative nodes for minimizing the total energy consumption. However, the optimal number of cooperative nodes cannot be determined only by the energy consumption of nodes. The minimum number of cooperative nodes should be determined with the distance from the source node to the target BS and the transmit power of a single node to ensure that the data can be transmitted to the target BS successfully. Thus, Ndis_min can be expressed as follows

where Ndis_min represents the optimal number of cooperative nodes determined by distance and node’s power. Et_max represents the energy consumption of a node for transmitting 1 bit of data with maximum power. Therefore, on the basis of the above two cases, the minimum number of cooperative nodes for nodes to transmit data over long distances is

The minimum number of cooperative nodes can be determined with the above equations. The optimal cooperative nodes should then be selected from the neighbor nodes set. The spacing of the cooperative nodes affects the beam pattern in the antenna array 36 because the SLL of the antenna array will increase if the spacing of the cooperative nodes is less than 2.5λ. 37 Therefore, the effect of the node spacing on the SLL of the antenna array should be considered in the process of selecting nodes. The SLL will be reduced by selecting a combination of nodes with node spacing greater than 2.5λ. In this study, a node selection method based on ring array is proposed.
The neighbor nodes set is Ncandidate = {j/j = 1, 2, …, Nneighbor}; each of nodes in the neighbor nodes set is a candidate node, and the cooperative nodes selected from the neighbor nodes set is Cbeam = {k/k = 1, 2, …, Nbeam} ∈ Ncandidate. The node selection steps are listed as follows:
Step 1. Determining the number of layers according to the transmission radius ρ of the source node. The number of layers of the concentric rings is

Step 2. Computing the number of nodes and storing the ID of the node in each ring. The neighbor nodes in each layer are determined by the distance from the neighbor nodes to the Snode. The node sets of each layer is Ni_floor = {m/N1, N2, …, Nm}, where
Step 3. The cooperative nodes are sequentially selected in order from the inner layer to the outer layer, and the node selection process is executed across layers. The distance between a single node and the other node should be greater than 2.5λ, and the one with high remaining energy will be the best cooperative node and reserved in the set Ncandidate. The remaining nodes that are not selected in each layer are stored in the Dcandidate set.
Step 4. The best cooperative node set Ncandidate is set as Cbeam. The number of best cooperative nodes is Nnum_beam, which must meet the following requirement

when Nnum_beam < Nmin, the satisfied nodes selected from the set Dcandidate will be added to the best cooperative node set Cbeam. Therefore, the best cooperative node number must be more than the minimum cooperative node number, that is, Nnum_beam > Nmin.
Step 5. The data source node Snode broadcasts a message to the neighbor nodes who are in the best cooperative node set Cbeam, and the best cooperative node sends a reply message to the Snode for confirming the cooperation.
Game execution process
In each round of game, the transmit power of cooperative nodes will be determined until it converges to the Nash equilibrium and the game ends. The number of cooperative nodes is different for each source node. According to the AF (equation (7)), the greater the number of cooperative nodes is, the greater the gain will be. However, the beam formed by the cooperative nodes produces larger mainlobe and sidelobe as the number of nodes increases. The SLL affects the quality of signal transmission. The parameters of the cooperative nodes, that is, the transmit power, should be adjusted to reduce the SLL of the antenna array, and the energy consumption of the node is considered simultaneously. The specific game process is as follows:
Step 1. The cooperative nodes set Cbeam is determined by the node selection algorithm. The source node Snode obtains the remaining energy of the cooperative nodes, and the cooperative nodes use the power

where k represents the kth cooperative node, m is the number of optional behaviors, ak1 is equal to the maximum power, and akm is the minimum power that ensures the successful transmission in between nodes. The value of other items can be determined by the actual situation.
Step 2. The node k ∈ Cbeam adjusts its own transmit power according to the power policy set Ak. The transmit power of the other nodes in the cooperative node set remains unchanged. The transmit power is continuously selected from the power set Ak to calculate the value of the utility function uk (ak, a−k) of the node k. When the value umax of utility function reaches maximum, the currently selected transmit power is taken as the transmit power of node k, and the node k transmit power is stored in the power set Pbeam. The other nodes in the cooperative node set Cbeam adjust their own transmit power in the same way until the power adjustment of all nodes in the cooperative node set Cbeam ends. The nodes power set Pbeam is

where n is the number of cooperative nodes.
Step 3. Updating the node power set Pbeam. The game is a dynamic game process. In Step 1, the power set Pbeam of the cooperative node is determined, but the game does not reach the Nash equilibrium, and the utility function does not obtain the maximum value. Therefore, all nodes in the cooperative node set Cbeam must repeat Step 1 and readjust the node power to update the node power set Pbeam; the utility function then obtains the maximum value. After several rounds of iteration, the game reaches Nash equilibrium, that is, the power set Pbeam of cooperative node does not change, and the game process is completed.
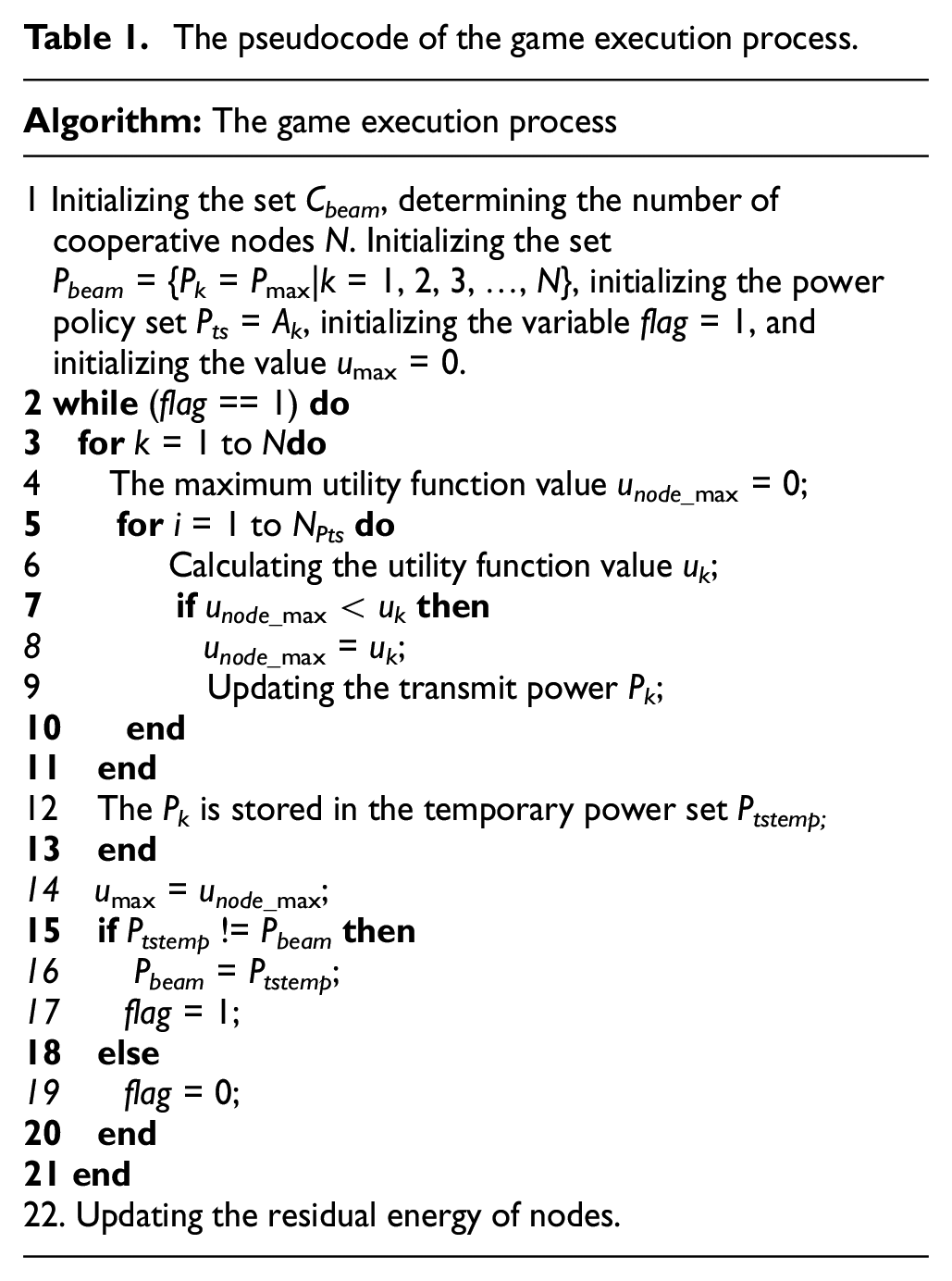
Step 4. The source node Snode broadcasts the power adjustment message (includes the ID and transmit power of each cooperative node) to the cooperative nodes participating in the collaborative transmission, and each cooperative node sends the confirmation message (ACK message) to the source node Snode. The pseudo code of the game execution process is shown in Table 1.
The pseudocode of the game execution process.
Cooperative nodes transmission phase
The long-distance collaborative transmission task is performed according to the power set Pbeam of the cooperative node determined. The carrier phase of each cooperative node reaching the target BS is synchronized by adjusting the initial phase of each cooperative node. According to the transmit power of the cooperative node, the node parameters are adjusted, that is, the weight W of each node in the beamforming. The cooperative node adjusts its initial phase and node parameters before transmitting data.
The weight W according to equation (9) can be expressed as

Maintenance-updating phase
The game algorithm is dynamically adjusted to balance the energy consumption of the nodes. Each node sets a threshold according to its own residual energy. When the residual energy of the node is lower than the set threshold, the node sends a request message to the source node to re-execute the game. After the source node receives the request of a re-game message, the source node starts to re-execute the game process. The source node then broadcasts “power adjustment message” to the cooperative node. The cooperative nodes readjust their own transmit power to ensure the energy consumption balance of nodes.
The flowchart of the EECT-PGB algorithm is shown as Figure 2.

The flowchart of the EECT-PGB.
Simulation results and analysis
Simulation parameter settings
The performance of the proposed EECT-PGB algorithm is simulated and verified in this section. First, for each source node, a group of cooperative nodes is selected from its neighbor nodes to form a virtual node antenna array. Second, the cooperative node uses the constructed potential game model to determine its own weight and power. Finally, the cooperative nodes perform long-distance collaborative transmission through beamforming technology. The SLL of the beam pattern in the EECT-PGB algorithm is compared with other algorithms to obtain the performance of the EECT-PGB algorithm in SLL suppression of the beam pattern. 38 The communication delay and energy consumption of the EECT-PGB algorithm are compared with those of other clustering and routing algorithms. The running cycle of the algorithms is divided into several rounds, and source nodes change in every round. The necessary simulation parameters are listed in Table 2.
Simulation parameters.

BS: base station.
Parameter analysis of utility function
In the EECT-PGB algorithm, the value of parameters affect the utility function of the potential game. As shown in equation (10), the utility function consists of two parts, namely, the gain of the energy consumption of the cooperative nodes and the SLL of the beam pattern of the virtual node antenna array. The proportion of the two parts is determined by adjusting the values of α and β. The relationship between α and β is

Figure 3 shows the peak sidelobes that correspond to the different values of α and β. When α and β are equal to 0.5, the SLL reaches the minimum, that is, the optimal value. Therefore, the following experiments make the same settings that α and β are set as 0.5. Under the conditions of other experimental parameters, adjusting α and β to increase the value of the utility function determines the value of them.

Parameters in the utility function.
Beam pattern analysis of cooperative nodes
The number and position of cooperative nodes affect the radiation pattern of the AF composed of the cooperative nodes. The sidelobe value in Figure 4(a) is less than that in Figure 4(b). High sidelobe will cause a large interference to the communication quality. Therefore, the ring array node selection algorithm is used to determine the cooperative node set and reduce the SLL. Figure 4(c) shows that as the number of cooperative nodes increases, all sidelobe values of the beam pattern will decrease while obtaining the minimum SLL. However, increasing the number of cooperative nodes will cause additional energy consumption; hence, the energy of the nodes will be exhausted in advance. In this case, network lifetime will be weakened accordingly. The detail of energy consumption of nodes is analyzed as shown in Figure 8 below.

(a) Normalized AF radiation pattern based on the ring array node selection algorithm, (b) normalized AF radiation pattern based on the random node selection method, and (c) normalized AF radiation pattern of all neighbor nodes.
The node selection strategy affects the interference relationship among the cooperative nodes. Therefore, two node selection methods, random nodes selection and nodes selection based on ring array, are used to select a group of cooperative nodes for beamforming. The SLLs of the two groups of nodes are compared to obtain the effect of the spacing in between cooperative nodes on the sidelobes. In the ring array–based node selection algorithm, a group of cooperative nodes with node spacing greater than 2.5λ is selected. The selected cooperative nodes have the same parameters, that is, the transmit power. A source node is randomly selected to form a set of cooperative nodes for simulation experiment, and the simulation results are analyzed as follows.
Figure 5(a) shows the cooperative nodes are selected randomly, and some cooperative nodes almost overlap. Figure 5(b) shows the cooperative nodes are selected optimally based on ring array, in which the nodes spacing is greater than or equal to the 2.5λ. Figure 5(c) shows the effect of the node position on the beam results when each cooperative node has the same transmission power. According to the experimental data, different combinations of cooperative nodes lead to different experimental results, and the spacing of the cooperative nodes affects the beamforming of the virtual node antenna array apparently. The distance between the BS and the source node is 1000 m, and the number of cooperative nodes is 21, which satisfies equation (31). According to the above two node selection algorithms, 21 nodes are selected from the neighbor nodes set to form a beam pattern. The SLL of the beam pattern based on the random node selection is −4.6649 dB. The SLL of the beam pattern in accordance with the ring array–based node selection is −6.1652 dB. Therefore, the ring array node selection algorithm can reduce the SLL of the beam pattern and improve the communication quality.

(a) Cooperation nodes selection in random way, (b) cooperative nodes selection optimization based on ring array, and (c) beam patterns of cooperative nodes: different cooperative node selection algorithms.
The normalized power patterns of non-optimization and EECT-PGB are shown in Figure 6. The average SLL is −24.7326 when the beamforming process is optimized by EECT-PGB, however, the value is −23.3813 for non-optimization. Meanwhile, the mainlobe of EECT-PGB is narrower than that of non-optimization. This phenomenon implies that the optimization process reduces the energy of sidelobe and increases the radiating ability of mainlobe, and the energy efficiency of the beam is increased accordingly.

Power patterns optimization for energy beamforming.
In the EECT-PGB algorithm, a game is performed on each cooperative node to determine the transmit power for each node. The transmit power of each cooperative node is used as a weight parameter to form an optimal beam pattern. For each comparison algorithm in this experiment, 21 nodes participate in the cooperative transmission process and each node participating in the beamforming process has a weight. Table 3 shows the weight of each cooperation node optimized by four comparison algorithms, and the corresponding value of max SLL is also listed.
Weight distribution of cooperative nodes optimized by different algorithms.
SLL: SLL; PSO: particle swarm optimization; GA: genetic algorithm; WSA: weighted swarm algorithm; EECT-PGB: energy-efficient collaborative transmission algorithm based on potential game theory for beamforming.
In Figure 7(a), the SLL of the weighted swarm algorithm (WSA) is −7.9636 dB, that of the PSO is −7.5864 dB, that of the GA is −7.8625 dB, and that of the EECT-PGB is −8.1014 dB. The SLL of EECT-PGB is reduced by 6.8%, 1.7%, and 3.0% compared with those of PSO, WSA, and GA, respectively. Figure 7(a) indicates that EECT-PGB has the smallest SLL. The use of the EECT-PGB algorithm is conducive to reducing communication interference and establishing high-quality communication links. In Figure 7(b), the different iterations of each algorithm have different SLLs. The iteration of the EECT-PGB is the process of the source node performing a game. When the game reaches the Nash equilibrium, the iteration ends. After the EECT-PGB algorithm performs 13 games, the game reaches the equilibrium point, the transmit power of the cooperative node does not change. The WSA, PSO, and GA are iterated nearly 130 times. A comparison of the SLLs of the above four algorithms in each iteration shows that EECT-PGB is superior to other algorithms.
(a) Beam patterns of various optimization algorithms and (b) the SLL value of various optimization algorithms during the iterative process.
Energy consumption and communication delay analysis
Network lifetime is defined as the round number the algorithm performs when the first node runs out its energy. In EECT-PGB, each round refers to all source nodes to perform a game. The number of nodes in the simulation experiment is 300. The parameters used in the node simulation experiment are shown in Table 1, and the energy consumption of the node is calculated by equation (25).
Figure 8(a) shows the energy consumption of the optimal cooperative nodes and all of neighbor nodes participating in the collaborative transmission, respectively. The optimal cooperative nodes are determined by the ring array node selection algorithm. The selection of cooperative nodes is beneficial to reduce the energy consumption of the entire network which can prolong network lifetime. Although all sidelobe values of the beam pattern will decrease when all of the neighbor nodes participate in collaborative transmission as shown in Figure 4(c), the energy consumption will increase accordingly. Figure 8(b) shows the energy consumption of four comparison algorithms. The EECT-PGB algorithm is compared with low-energy adaptive clustering hierarchy (LEACH), energy-efficient clustering scheme (EECS), and uneven clustering algorithm (UCR). The advantages of using EECT-PGB is apparent in reducing the nodes’ energy consumption. The average residual energy of the EECT-PGB is higher than that of other algorithms. The EECT-PGB uses beamforming technology for long-distance collaborative transmission, and N2 times of gain is generated in the direction of the target BS. Therefore, the transmit power of the cooperative node can be reduced to 1/N2 of the original power. In EECT-PGB, the first energy-depleted node appears in 400 rounds due to the random deployment of the nodes. Given that no other adjacent nodes around the node, the node continuously participates in collaborative transmission, which causes the node energy to be exhausted in advance. Other clustering routing algorithms transmit data in the form of multi-hops. The cluster member sends the data to the cluster head, then the cluster head transmits the data to the target BS in a multi-hop manner after the data fusion step. Consequently, the energy of the cluster head is exhausted in advance. For example, LEACH and EECS have the first energy-depleted cluster head node in 350 rounds. The UCR balances the energy consumption of the cluster head; thus, the first energy-depleted node appears in 400 rounds. Based on the simulation results, the average energy consumption of EECT-PGB is decreased by 40.0%, 27.3%, and 14.3% compared with those of LEACH, EECS, and UCR, respectively. Figure 8(c) shows the variance of the average energy consumption of EECT-PGB and other clustering routing algorithms. The variance of EECT-PGB is smaller than those of LEACH, EECS, and UCR. Moreover, EECT-PGB has more stable energy consumption and thus has the advantage of prolonging network lifetime.

(a) Average residual energy of different node combinations in EECT-PGB, (b) average residual energy of nodes of four comparison algorithms, (c) variance of average residual energy of nodes, (d) average energy consumption of control packets of four comparison algorithms, and (e) average communication frequency of four comparison algorithms.
As shown in Figure 8(d), the energy consumption of control packets is compared among EECT-PGB and the other clustering routing algorithms. The performance of EECT-PGB is superior to that of the other algorithms. In clustering routing algorithms, multiple communications between nodes are required from constructing clustering to data transmission, resulting in high energy consumption of control packets. Because multi-hop transmission mode is adopted to transmit data in UCR, the energy consumption of control packet in UCR is higher than that of other algorithms. The cooperative transmission process is simple than constructing cluster, therefore, the number of control packets in EECT-PGB is fewer than that of the other algorithms. Figure 8(e) shows the average communication frequency of EECT-PGB, LEACH, EECS and UCR. The communication frequency is defined as the number of communications required to establish a connection between a source node and a target node. EECT-PGB has a significant advantage in terms of communication frequency because the nodes in the proposed algorithm can use beamforming to directly communicate with the BS without multiple hops in the collaborative transmission stage. The cluster head in LEACH and EECS can communicate directly with BS, but the communication frequency of EECS is higher than that of EECT-PGB, as frequent communications occurred between nodes in cluster construction process. The cluster head in UCR communicates with the BS in a multi-hop manner, therefore, it has high communication frequency.
Complementary cumulative distribution function analysis
The complementary cumulative distribution function (CCDF) of the beam pattern is the probability that the average power in one direction exceeds the threshold power Po.38,39 CCDF is accordingly defined as follows

where θ ∈ [−π, π]. Figure 9(a) and (b) shows the CCDFs of the beam patterns formed by different algorithms, which are composed of different numbers of cooperative nodes. The cooperative nodes in Figure 9(a) are determined by the ring array node selection algorithm. The cooperative nodes in Figure 9(b) consist of all neighbor nodes.

CCDFs of beam patterns for different algorithms: (a) cooperative nodes determined based on the ring array node selection algorithm and (b) cooperative nodes that consist of all neighbor nodes.
Figure 9 shows the effect of the number of cooperative nodes on the CCDF of the beam pattern. In Figure 9(a) and (b), the probability that the SLLs of EECT-PGB, GA, WSA, and PSO are greater than the threshold power Po gradually decreases as Po increases. The SLL of EECT-PGB is always lower than those of other algorithms, that is, the CCDF of the beam pattern obtained by the EECT-PGB algorithm is superior to other algorithms. Figure 9 also indicates that the number of cooperative nodes influences CCDF. The number of cooperative nodes in Figure 9(a) is less than those in Figure 9(b). However, the value of CCDF is lower in Figure 9(b) than in Figure 9(a). The result shows that numerous cooperative nodes can reduce the value of CCDF, but the energy consumption will increase accordingly. The goal of this study is to realize a trade-off between the quality of communication link and network energy consumption.
Conclusion
This study proposes EECT-PGB for solving problems of unbalanced energy consumption and poor quality of communication links in long-distance collaborative transmission of WSNs. First, a ring array node selection algorithm is proposed to select a group of cooperative nodes from the neighbor nodes. Second, the cooperative nodes are used to form a virtual node antenna array, which can perform long-distance collaborative data transmission through beamforming technology. The transmit power of the cooperative node is taken as the node weight in beamforming, and the appropriate transmit power is selected for each cooperative node based on the constructed potential game model, thereby achieving joint optimization of node energy consumption and SLL. The simulation results show that the EECT-PGB has obvious advantages over LEACH, EECS, and UCR in terms of energy consumption. The average energy consumption of EECT-PGB is decreased by 40.0%, 27.3%, and 14.3% compared with those of LEACH, EECS, and UCR, respectively, which implies prolonged network lifetime. In terms of suppressing the SLL, EECT-PGB also has obvious advantages over PSO, WSA, and GA. The SLL of EECT-PGB is reduced by 6.8%, 1.7%, and 3.0% compared with those of PSO, WSA, and GA, respectively, which implies improved communication quality of the network. Node movement scenario will be expanded in our further research.
Footnotes
Acknowledgements
The authors express their sincere appreciation to the editors and the anonymous reviewers for their helpful comments.
Handling Editor: Valerio Freschi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded in part by Jilin Province Foundation for Excellent Youth Talents, grant number 20190103052JH, and Youth Foundation of Changchun University of Science and Technology, grant number QN2017013.