
Abstract
In this article, we present a sensitivity-enhancing feedback control–based damage detection method for piezoelectric actuator and sensor bonded composite laminates with delamination failures. The present method mainly consists of two parts: delamination modeling and feedback controller design. We first introduce the adopted improved layerwise theory–based mathematical model for delamination modeling with finite element implementation. The obtained second-order governing equations are transformed into the state space model for design of state feedback controller. Proper pole placement is required to enhance the sensitivity of frequency shifts to stiffness change caused by delamination. We investigated different delamination interfaces and longitudinal locations for studying the feasibility and efficiency of the present method. The present results clearly demonstrate that with the applied state feedback controller, the frequency shifts of the closed-loop system are significantly enhanced. The proposed sensitivity-enhancing feedback control can be used as an efficient tool for detecting delamination failures in smart composite structures.
Introduction
Fiber-reinforced composite materials have many advantages over traditional metal and nonmetal materials due to their high stiffness-to-weight ratio, high strength-to-weight ratio, and other physical and chemical properties. 1 Fiber-reinforced composite materials are conventionally fabricated in the laminated form or woven form to achieve considerable mechanical properties in various directions. Although better load carrying capability can be achieved for the laminated structures, it can also cause undesired stress concentration problem because of the discontinuity of material properties through thickness. The stress concentration could lead to delamination failure or crack damage in laminates affecting the static and dynamic performance of composite structures. 2 The existence of initial delamination or crack results in more severe stress concentrations, which in turn will accelerate propagation of failures. Thus, it is of great importance to detect the existence of delamination or crack failure timely in order to prevent the risk of disastrous damages.
Vibration-based damage detection and localization in smart composite laminates have been widely studied, including the measurements of natural frequencies, modal shapes, and modal curvatures.3–6 However, measuring the natural frequencies is easy to implement, where the damage information is recognized by the frequency shift compared with the healthy structure. Nevertheless, using the measured frequencies to detect damage has some limitations. First, only the first several natural frequencies can be accurately measured by the conventional vibration-based techniques. Thus, the damage localization cannot be realized with unique solution by only several lower frequencies, and it is insufficient to characterize the damage and identify the damage parameters. Second, the natural frequencies are insensitive to the variations of damage parameters, that is, the delamination failure in composite laminate causes very weak effect on the frequency shift that cannot be detected significantly, although the delamination length is almost one-third of the length of the laminate.7,8 Therefore, these limitations restrict the application of measured frequency-based damage detection methods. To overcome these problems, other techniques have been proposed for damage detection via sensitivity study.9,10
The existence of damage can be recognized by extracting damage features, while the location and severity of damage have to be evaluated by other inverse methods, intelligent methods, 11 and together with the parameter study.12,13 Once the damage-related parameters have subtler influence on the damage features, that is, natural frequencies, the sensitivities of damage parameters have to be studied. As long as the damage parameters are found to have considerable effect on the damage features, the damage detection method is applicable. Therefore, the key issue becomes to enhance the sensitivity of damage parameters to damage features. There exist a large quantity of literature works related to sensitivity analysis for damage detection. Lu and Law 14 conducted the sensitivity study of dynamic response with respect to a perturbation of a system parameter. Liu et al. 15 reported a singular spectrum analysis for enhancing sensitivity in structural damage detection with noisy environment. Zabihollah et al. 16 also conducted the sensitivity analysis of smart laminated beams with surface-bonded piezoelectric actuators and sensors.
There is another method which uses feedback control to enhance the sensitivity of frequency to mass and stiffness changes. Ray and Tian 17 first used sensitivity-enhancing feedback control for damage detection in beam structure. The basic concept is to detect the frequency shift in closed-loop system, not open-loop system, since the frequency change is much more significant in the closed-loop system when applying the state feedback or output feedback control algorithm. They later extended the sensitivity-enhancing feedback control method for damage detection in a multi-input system.18,19 To best illustrate the sensitivity enhancement performance, the effects of both closed-loop eigenvalues and eigenvectors were taken into consideration 20 for a multi-degree-of-freedom (DOF) system. Jiang and Wang 21 experimentally validated the sensitivity-enhancing control method for damage detection, and the experimental results showed that the frequency sensitivity with respect to mass variation can be largely enhanced by applying feedback control.
Since numerous analyses have shown the benefits of using sensitivity-enhancing control method for damage detection, in this article, we propose a theoretical study of sensitivity-enhancing feedback control method–based damage detection in smart composite laminates with delamination failure. We first introduce mathematical modeling by adopting the improved layerwise displacement fields as well as the Heaviside function so as to simulate a delamination failure. 22 Using the four-node plate element, the finite element model is built and the second-order linear governing equations are obtained. The feedback controller is designed in the state space model using the state feedback. The delamination has three interfacial locations and two longitudinal locations. The sensitivity of frequency to stiffness change caused by delamination will be investigated and compared for both open-loop and closed-loop systems of undamaged and delaminated plates. With the feedback control, the proposed methodology can be used not only for damage detection but also for vibration suppression in smart composite structures.
Statement of the methodology
In order to simulate a single delamination in smart composite laminated plate, an improved layerwise theory is adopted with Heaviside functions to describe the discontinuous displacements for both in-plane and out-of-plane moments. The geometric configuration is shown in Figure 1 with seeded delamination at location A and location B, where the delamination length is 10 cm which equals one-third of the total length of the clamped plate. The piezoelectric actuator and sensor are located close to the clamped side of the delaminated plate and in the middle of the width to avoid coupling between bending and twisting modes. The dimensions of the plate, actuator, and sensor are also given in the figure. The plate is made of a 16-layer symmetrically layered laminate and has a stacking sequence of [0/90]4s. In thickness, the delamination is preset to be located at different interfaces, as shown in Figure 2, where D0 represents the delamination located at the mid-plane of the laminate, D3 represents the delamination located at the third interface from the mid-plane of the laminate, and D6 represents the delamination located at the sixth interface from the mid-plane of the laminate. The vibration signal detected by the sensor can be fed back to the actuator that constructs an active vibration control system for the smart composite laminated plate.
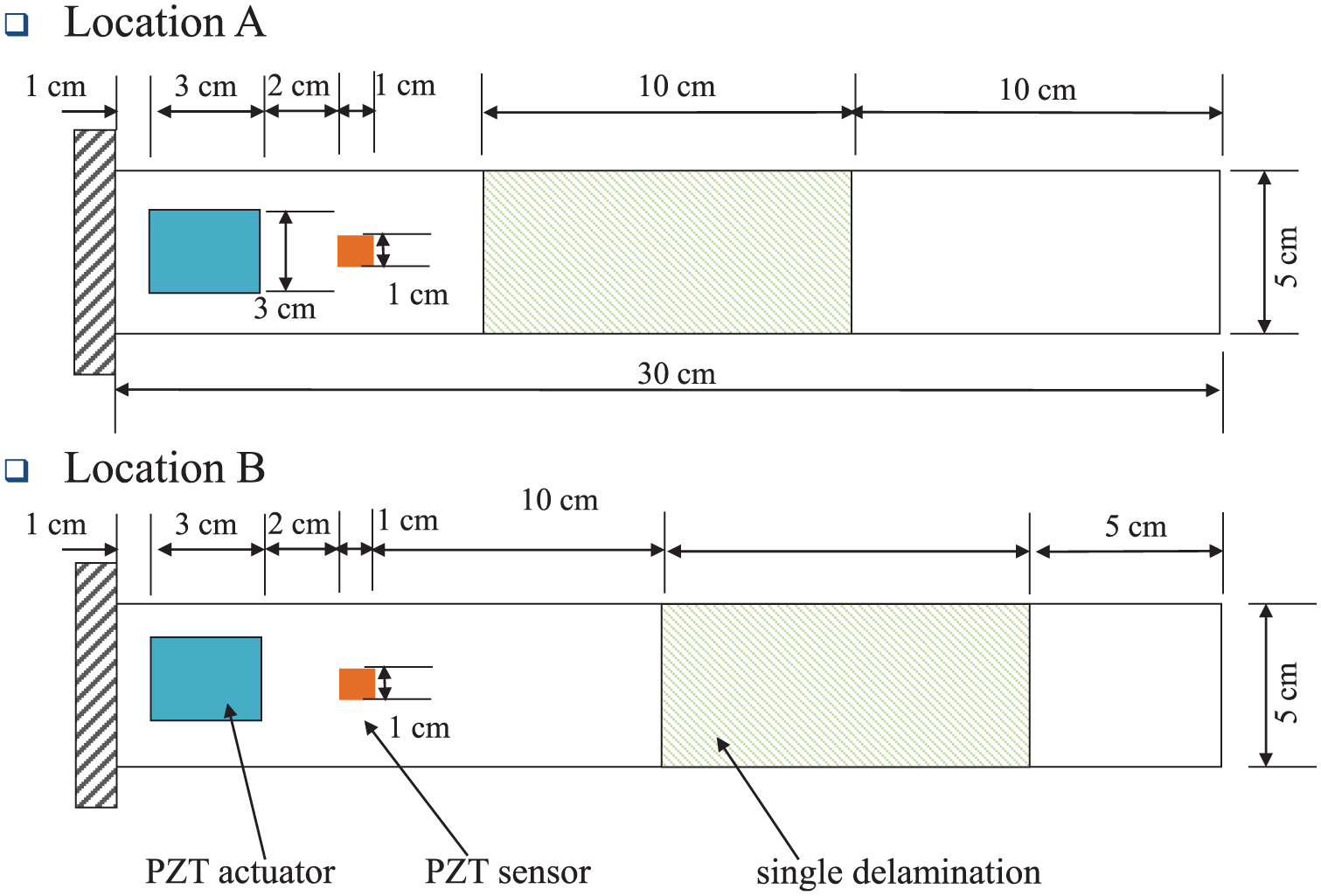
Geometric configuration of delaminated smart plates with single delamination located at positions A and B.

Three delaminated interfaces within half thickness, represented by D0, D3, and D6.
Upon the developed plate theories, the modeling of laminated structures initiates from the assumption of the displacement fields. Herein, we adopt the improved layerwise theory which was developed by Kim et al., 23 where the displacement functions consist of the first-order functions, layerwise functions, and Heaviside functions. Thus, the displacement fields are given by

where i equals 1 or 2 representing x or y coordinate, and k represents the kth layer. The subscript i represents the first-order partial derivative with respect to the coordinate i. The symbol
The higher order electric potential field is used to describe the variation of potential through the thickness of the laminate, which satisfies the boundary conditions including applied voltages and charge conversation law, as shown in equation (2)

where
Using the energy function, the total energy F can be expressed by equation (3), including the elastic strain energy, electrical energy, and their coupling energy

where
Based on the given energy, the constitutive relation can be obtained by the following equation
where
The mathematical model is further derived using the finite element method (FEM)-based formulation. Therefore, by defining the structural unknowns (

where
Then, using Hamilton’s principles, the equations of motion can be derived

where
By means of the constitutive relation and kinematic relation, the equation of motions can be obtained by the variational principle, as shown in equation (7)
where
Equation (7) can be further simplified using the matrix condensation method. From equation (7), the expression of the nodal potential

where
The existence of different interfacial and longitudinal locations of delamination affects dynamic characteristics and damage severity differently. This requires proper techniques to detect damage and evaluate damage severity in case of sudden failure occurring during the service life of smart structures. In this work, based on the established delamination modeling, a feedback control–based damage detection method is developed for delaminated smart composite plates. Using the state space method, the control model is expressed as

where the subscript c represents the control system in the continuous domain. The state
Since the nodal displacement and its first derivative (velocity) are taken as the states, state estimation has to be implemented first for applying the state feedback control and then the state feedback control using the estimated displacement and velocity can be applied for vibration control or sensitivity enhancement. Based on the works by Ray and Tian, 17 the poles of the closed-loop system should be placed at values lower than the poles of the open-loop system in order to enhance frequency sensitivity to stiffness change. For the delamination failure, it only causes a reduction in stiffness and the mass matrix remains the same. Thus, we can follow the rules of pole placement developed by Ray and Tian 17 in our feedback controller design. A linear state-feedback controller has the following form in the absence of mechanical input.

where Gc is the control gain. With certain value of control gain, the electrical input given to the actuator can be obtained from the expression of input vector in the absence of mechanical input.
Substituting equation (10) into equation (9) forms a closed-loop system as follows

where Ac +BcGc is named as the closed-loop system matrix. The gain Gc determines the poles of the closed-loop system. Inversely, when we set the position for closed-loop poles, control gain can be calculated. Thus, in our present methodology, we first place poles for undamaged structure and calculate the corresponding control gains. These gains will be further used in designing feedback controller for damaged structures. With this feedback controller, the natural frequencies of open-loop and closed-loop systems for damaged structures can be compared for predicting the existence of damage.
Results and discussion
With the developed methodology, the study of sensitivity-enhancing feedback control for damage detection is demonstrated using a 16-layer delaminated plate with a layup stacking sequence of [0/90]4s. The total thickness of the plate is 2 mm, while the thickness of the actuator and sensor is 0.25 mm. The actuator and sensor use the same piezoelectric material, lead zirconate titanate (PZT). The material properties are given in Table 1. The K1100 fiber and 954-2A cyanate resin are used for the fabrication of composite laminates. 23 First, we demonstrate the first five natural frequencies for undamaged and three damaged plates without considering the feedback, the frequencies of which are given in Table 2. We can clearly find that the differences between the lower frequencies of undamaged and damaged plates are quite small, although the delamination length is equivalent to one-third of the length of the plate. This results in tough problems in vibration-based nondestructive testing (NDT) of damages since the damage effect is not significant that cannot be identified from lower frequencies. Herein, the damage effect is mainly referred to the effect on system natural frequencies. Although the differences for higher frequencies are much larger, conventional vibration-based NDT methods are hard to detect such differences due to measurement noise and other disturbance signals of high frequencies. More accurate and precise vibration-based measurement techniques have to be developed before higher frequencies could be used for damage detection. And other data process techniques or intelligent methods are also required when using the vibration-based NDT methods.
Material properties of single-layer laminae and piezoelectric material.

First five natural frequencies (Hz) for undamaged plate and three delaminated plates, at delamination location A.

According to the previous discussion, the pole placement method is used to enhance the frequency shift for the closed-loop system compared with the open-loop system. Table 3 lists the system poles of the open-loop and the desired closed-loop systems for a healthy composite laminated plate. The symbol i represents the imaginary part of complex value. Thus, to implement the pole placement method, the first three poles of the closed-loop system are placed lower than the open-loop system to enhance the sensitivity of frequency to stiffness change. This is manipulated by reducing the absolute values of the imaginary parts of open-loop poles. It should be noted that we only control the first three modes; the fourth and fifth modes remain the same. Thus, with the given poles, it is possible to calculate the corresponding control gains which will further feed to design the controller for delaminated plates. Then, the closed-loop frequencies will be compared with those of the open-loop system.
Open-loop poles and desired closed-loop poles for undamaged plate.

Thus, we first investigate the sensitivity enhancement of the plates with delamination located at position A and three interfaces, D0, D3 and D6. The frequency shifts for the open-loop vibration are shown in Figure 3. The shift of the frequency is defined by the following equation

where “Abs” represents the absolute value. It can be seen that frequency shifts are very small for the first four frequencies. The frequency shifts are 3.16%, 9.13%, 1.62%, 5.83%, and 29.91% for the first five modes of the D0 case. For the D3 case, the frequency shifts are 2.03%, 5.87%, 1.03%, 4.12%, and 22.45%, respectively. For the D6 case, the frequency shifts are 0.39%, 1.65%, 0.20%, 1.43%, and 5.62%, respectively. From these data, we conclude that when the delamination interface is closer to the surface, the frequency shifts are much smaller. This is because when delamination locates close to the mid-plane, the damage effect is significant, while the delamination located close to the surface has much weak damage effect. Moreover, conventional NDT-based method is hard to detect the shifts of such low natural frequencies. Then, we applied the state feedback control and obtained the frequency shifts, shown in Figure 4. Under present control condition, we found there is a great improvement in the frequency shifts for the first three modes since we only placed the poles for the first three modes. For the D0 case, the frequency shifts are 19.06%, 27.34%, and 59.26% for the first three modes. For the D3 case, the frequency shifts are 35.59%, 58.72%, and 14.13%. For the D6 case, the frequency shifts are 36.66%, 63.02%, and 11.94%. Thus, it is found that the shift of the natural frequencies of the closed-loop system is much more significant than that of the open-loop system. The sensitivity of frequency to delamination failure is significantly enhanced via applying the feedback control. This provides a possible way to detect damages using the feedback controller.
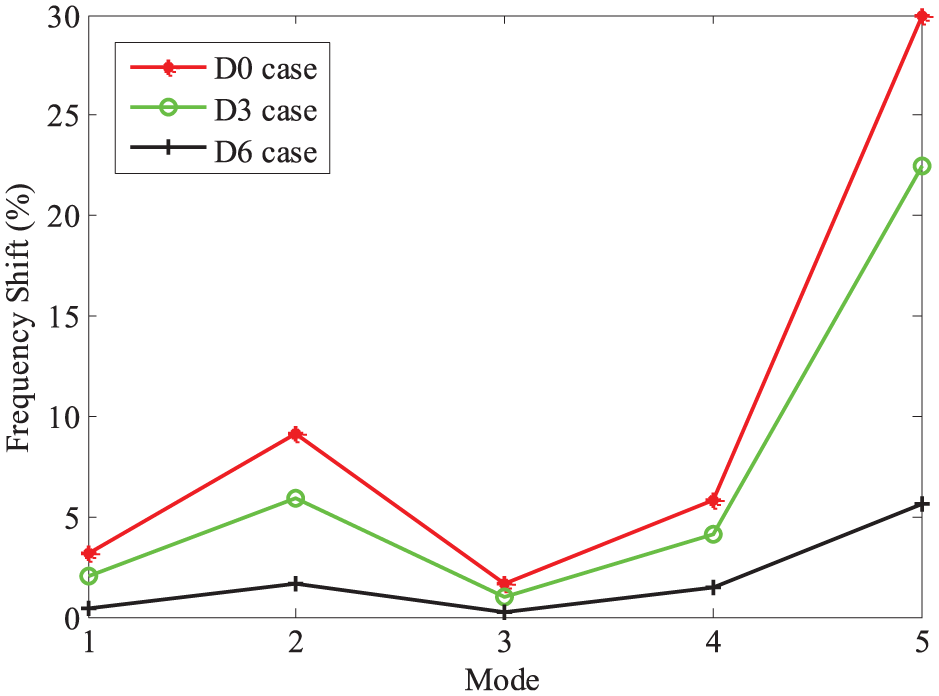
Frequency shifts in delaminated plates under open-loop vibration for different delamination interfaces, where delamination occurs at location A.

Frequency shifts in delaminated plates under closed-loop vibration for different delamination interfaces, where delamination occurs at location A.
Next, we examined the delamination located at position B, as shown in Figure 1. First, as we know, when the delamination is located far from the clamped end, the damage effect is weak. Thus, the delamination located at position B has weaker damage effect than the delamination at position A, which is reflected by the shift of the natural frequencies of the open-loop system which is shown in Figure 5, with the same pole placement. For the D0 case, the frequency shifts are 1.95%, 5.10%, 5.94%, 15.01%, and 11.22% for the first five modes. For the D3 case, the frequency shifts are 1.24%, 3.22%, 3.85%, 10.38%, and 7.06%, respectively. For the D6 case, the frequency shifts are 0.23%, 0.96%, 0.74%, 2.84%, and 1.31%, respectively. From these data, we found the shifts of the first two frequencies are much smaller than those of the location A case which represents the weaker damage effect. Applying the feedback control, the frequency shifts are shown in Figure 6. Significant enhancement of the frequency shifts of the first three modes can be observed with the values of 18.62%, 15.81%, and 48.04% for the D0 case, 35.41%, 60.71% and 14.19% for the D3 case, and 22.68%, 37.7% and 58.97% for the D6 case. These values are larger than the previous location A case, indicating that with the present control gain, the performance of the feedback control for sensitivity enhancement is better for the location B case. However, both work well in enhancing the frequency shifts due to delamination failures, and the results well demonstrate the feasibility of using feedback control to detect damages for smart composite structures.

Frequency shifts in delaminated plates under open-loop vibration for different delamination interfaces, where delamination occurs at location B.
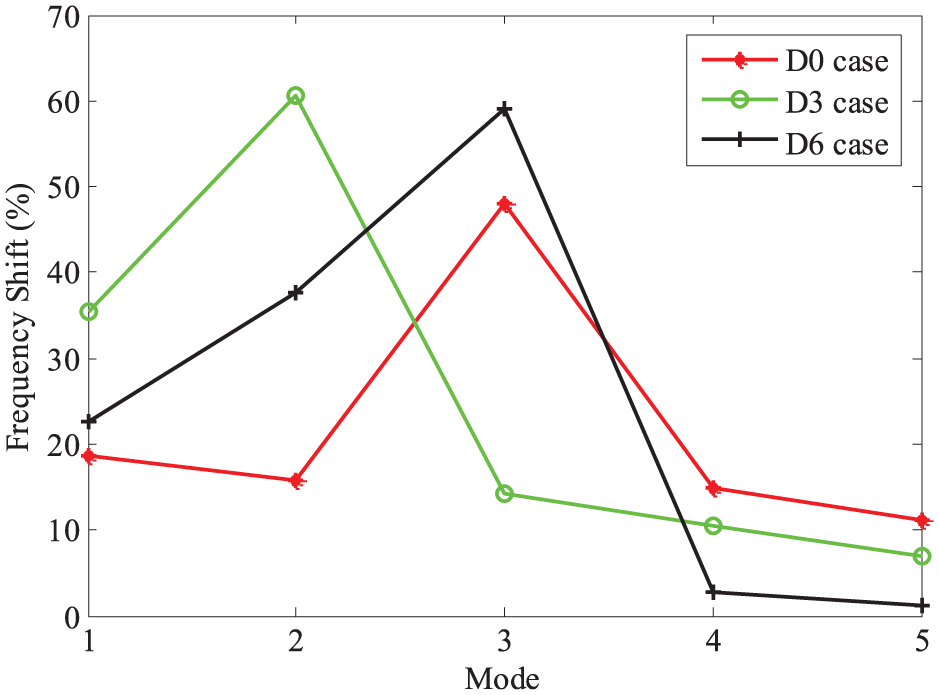
Frequency shifts in delaminated plates under closed-loop vibration for different delamination interfaces, where delamination occurs at location B.
Conclusion
In this work, we proposed a theoretical study of sensitivity-enhancing feedback control–based damage detection method in delaminated composite plates. The delamination modeling was built by means of the improved layerwise theory and Heaviside function to address the displacement fields with possible jump and slipping between adjacent layers. The FEM-based second-order governing equations were derived for delaminated plates, and the equations were further transformed into the state space model for controller design. The full-state feedback control–based algorithm was applied with state estimation to investigate the frequencies of the closed-loop system. The closed-loop poles were placed lower than the open-loop poles so that the sensitivity of frequency shift to stiffness change can be enhanced. The frequency shifts of closed-loop systems with different delamination interfaces and longitudinal locations were investigated, and the results well proved that the frequency shifts were significantly enhanced via applying the feedback control. Thus, the proposed method well demonstrated the feasibility of using sensitivity-enhancing feedback control in detecting damages and could be taken as an efficient methodology for NDT of damages in smart composite laminates with delamination failures as well as vibration suppression.
Footnotes
Handling Editor: Kenneth Loh
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos. 11702150), the State Key Laboratory of Mechanics and Control of Mechanical Structures (Nanjing University of Aeronautics and astronautics) (Grant No. MCMS-0516Y01), the Natural Science Foundation of Ningbo (Grant No. 2016A610056), research fund from Ningbo University (Grant Nos XYL16008 and XYL17019), and the K.C. Wong Magna Fund through Ningbo University.