
Abstract
Diabetes mellitus is a persistent metabolic syndrome caused by impaired capability of the body’s production and usage of insulin. This impaired capability results in chronic hyperglycaemia, the elevated glucose concentration in the bloodstream, which may lead to many incurable complications. To escape this dire situation, a proper model-based exogenous infusion of insulin bolus is required, which is usually established via different feedback control strategies. In this article, the authors present a mathematical model–based robust integral sliding mode control approach for stabilization of internal glucose–insulin regulatory system in type-1 diabetic patient. Since the state variables of the system are not directly available to the controller, a uniform exact differentiator observer is employed to accomplish the aforementioned task. In the proposed control law, the incorporation of integral term in the switching manifold eliminates the reaching phase, which causes the sliding mode to establish from the very initial point, thus enhances the robustness property of the proposed control scheme. Moreover, the chattering problem is also substantially suppressed to a considerable extent along a defined manifold. To verify the theoretical analysis, the proposed control law is verified via computer simulations which demonstrate the effectiveness of the proposed control law against the external perturbations, that is, unannounced meal intake and physical exercise.
Keywords
Introduction
In normal person, the glycaemia rests in the narrow range of 70–100 mg/dL, which is affected by numerous factors including meal intake, physical activities, rate of glucose digestion and absorption and so on. The regulation of glycaemia within a specified range is maintained by endocrine hormones, that is, insulin and glycogen. Whenever the plasma glucose level exceeds the desired range, insulin is secreted, while glucagon exhibits a reverse action to retain the basal value. These two hormones are secreted by alpha and beta cells, belonging to pancreatic islets within a pancreas.
Diabetes mellitus (DM) is an endocrine disorders, characterized by the existence of continual hyperglycaemia. In DM, the internal glucose–insulin regulatory system becomes malfunctioned, which results from either immune-mediated or insulin resistance, which are termed as type-1 and type-2 diabetes, respectively. In type-1 diabetes, the alpha and beta cells within a pancreatic islets get destroyed which causes the pancreas incapable of insulin production. Thus, the lack of insulin formation leads to hyperglycaemia, which may result in long-lasting diseases including cardiac attacks, unconsciousness, blindness, joint problems and so on. 1
To avert the aforementioned complications, an exogenous insulin bolus is required to keep the plasma glucose concentration within a desired range. Consequently, an efficient control of plasma glucose concentration is the most significant issue in the global diabetic community. The ongoing insulin therapy includes the periodic monitoring of plasma glucose concentration via off-the-shelf sensors and the subsequent infusion of exogenous insulin bolus. 2 The graphical view of existing diabetic treatment is demonstrated in Figure 1.
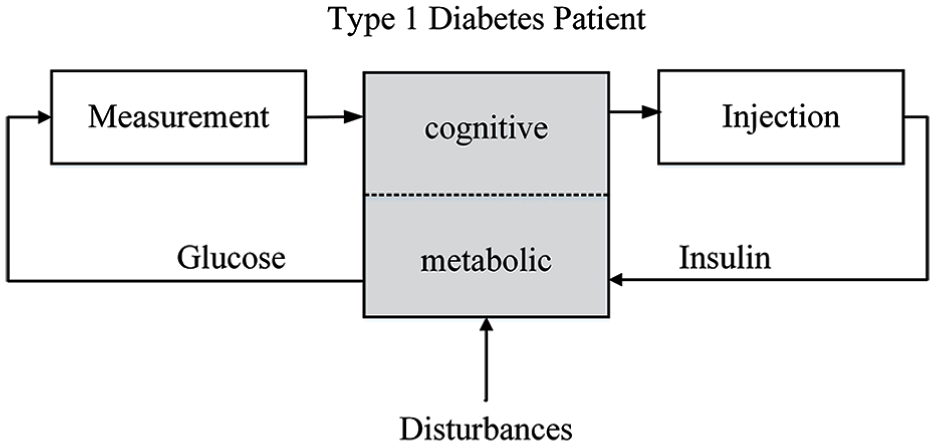
Block diagram of current insulin therapy.
Finding a reliable and less invasive procedure for blood glucose regulation at basal value is a motivating research problem in diabetic community.
An appropriate approach for maintaining euglycaemia is to practise a continuous insulin therapy that can be acquired through a fully automated close loop device, termed as artificial pancreas.3,4 An artificial pancreas mimics the natural behaviour of the internal glucose–insulin regulatory system. It constitutes of subcutaneous embedded glucose monitoring sensor and an insulin pump. 3 The remote glucose monitoring sensor continuously measures the plasma glucose concentration, which then transmits the measured value to an insulin pump, where a proper controlled algorithm decides the desired amount of exogenous insulin bolus, which is then delivered into the patient’s body intravenously, thus completing the close loop cycle. In practice, a fully automated close loop device is more preferable to stabilize the plasma glucose–insulin concentration. However, to shape a device that would replace the existing insulin therapy is not a simple and easy task, as it should be assembled of a bio-compatible material and programmed of robust control algorithm. This is currently under research and refinement phases. A complete configuration of the close-loop control system that works like an artificial pancreas is shown in Figure 2.
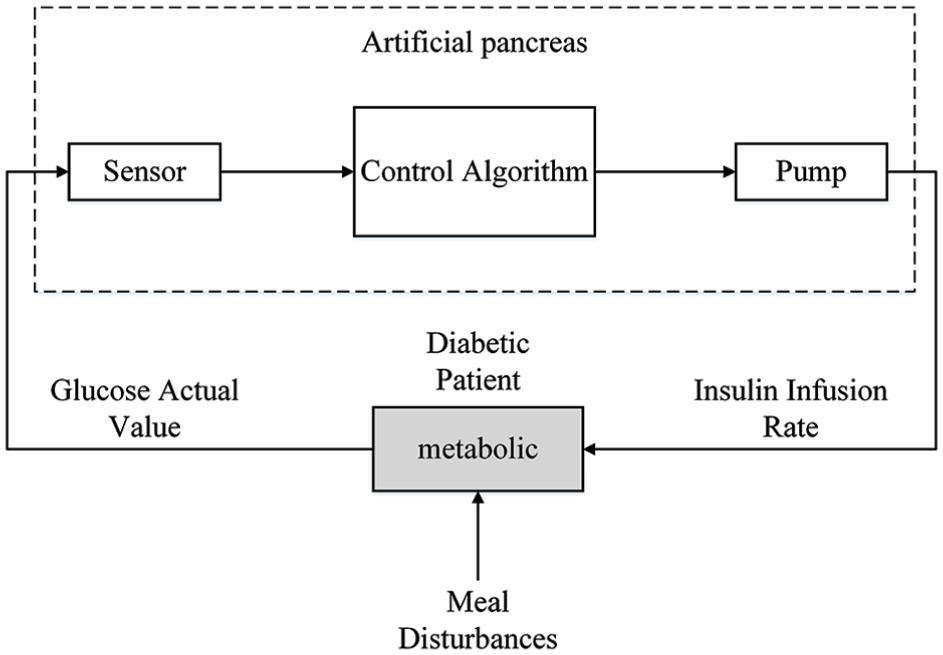
Block diagram of close loop control system.
To design a robust control algorithm, certain requirements must be considered such as settling time and robustness to uncertainties. It is quite obvious that the persistent hyperglycaemia may cause certain long-lasting diseases; hence, the time required to achieve euglycaemia is of great importance. Second, the consideration of physiological model–based control structure can cause the parametric uncertainties, due to the inconsistency in inter-patient physical characteristics. Thus, to design a fully automated close-loop control system, the control algorithm must be robust enough to counteract the parametric uncertainties and external perturbation.
To stabilize a glucose–insulin regulatory system at basal value, a variety of control approaches are presented in the literature. Linearized model–based control algorithms include model predictive control scheme,5,6 pole placement control topology,
7
a robust
In this work, an integral manifold–based robust SMC approach is investigated for the stabilization of internal glucose–insulin regulatory system in type-1 diabetic patient. In the proposed control law, due to the incorporation of integral term in the switching manifold, the sliding mode establishes from the very initial point, thus eliminating the reaching phase. The elimination of reaching phase enhances the robustness property of the specified controller against the undesired perturbations. Furthermore, a uniform exact differentiator is also worked out to estimate the state variables of the under-studied model, which are not directly available to the controller.
The remaining article is arranged in the following sequence: In section ‘Patient model’, the mathematical model of type-1 diabetic patient is briefly described. Section ‘Control law design’ contains the design methodology of the proposed control approach. In section ‘Results and discussion’, the detailed analysis of numerical results are carried out, while section ‘ Conclusion’ presents the overall conclusion of the article.
Patient model
To design a fully automated close-loop control strategy for plasma glucose–insulin stabilization at basal value, a proper structure of internal glucose–insulin dynamics within a human body is required. Up to date, a wide range of mathematical model are investigated, which are categorized into either subcutaneous or intravenous model. Some of it is composed of partial differential equations, 22 ordinary differential equation,23,24 delayed differential equations and so on. 25 In this work, an intravenous patient model, widely known as Bergman’s minimal model, is considered, which is mostly referenced as intravenous glucose tolerance test (IGVTT) model in the literature. 26 Figure 3 shows the graphical representation of the Bergman’s minimal model.

Block diagram of internal glucose–insulin regulatory system.
The aforementioned model accurately approximates the dynamical response of glucose–insulin interaction in diabetic patient using the following nonlinear differential equations

where

where

and

where

Assumption 1
The disturbances
The control function
Control law design
To formulate a proper feedback control law for tracking the basal value of plasma glucose concentration in type-1 diabetic patient, the nonlinear system (2) in controllable canonical form can be expressed as follows 28

with

where

The key objective is to drive the state vector to desired equilibrium point in the presence of lumped uncertainty. This can be achieved via robust integral switching manifold approach. 29 The proposed integral sliding manifold can be represented as follows

where z is the integral term, while

where

Taking time derivative of equation (5) along equation (4) yields

In the proposed control technique, the control law is composed of two components, that is

where the first part
Choosing the integral term dynamics from equation (8), we obtain

The continuous control law

where

Remark 1
The strong reachability law, which is considered in this work, can be expressed as follows

where

The complete control law, thus responsible for steering the system states into desired equilibrium point, can be re-written as follows

The designed control law would ensure the asymptotic convergence of the system states if the switching parameters hold the condition, that is,
The sliding mode enforcement along with the asymptotic convergence of the system states is certified in the forthcoming theorem.
Theorem 1
Consider system (4). If the manifold, reachability law and control law are chosen according to equations (5), (11), and (13) with integral dynamics (9), then the sliding mode enforcement along equation (5) can be confirmed. Consequently, the states will converge asymptotically towards the desired reference trajectory.
Proof
Considering the Lyapunov candidate function (LCF) of the form, that is,

Using the identity

The enforcement of sliding mode is guaranteed, if the condition, that is,

where

This differential inequality (17) is the extended version of finite time stability and thus the settling time obtained would be finite instant and can be expressed as follows 30

The mathematical equations expressed in equation (16) confirm the finite time sliding mode enforcement along the defined manifold. Now, keeping in view the proposition,
31
so it becomes clear that the system in sliding mode is driven by only
Uniform exact differentiator observer
The designed control law (13) relies on the state variables of the system, which are not directly available to the controller. Hence, an observer is required to estimate these state variables. The system’s output
As already reported that only the output, that is,
The mathematical structure of the UEDO can be expressed as follows

where


where
The highest degree nonlinear term, that is,

where


where
Results and discussion
In this section, the performance analysis of the proposed close-loop control strategy with respect to plasma glucose–insulin stabilization is comprehensively demonstrated via computer simulations. All the numerical simulations are performed in the MATLAB environment to justify the theoretical claims. The preliminary conditions for the glucose–insulin dynamics are set to
System parameters and their values.

To validate the performance of the integral SMC algorithm, it is essential to be familiar with the transient response of internal glucose regulatory systems of both healthy and sick person which is depicted in Figure 4. Note that during the initially caused hyperglycaemia, the internal glucose regulatory system in healthy patient proficiently achieved euglycaemia in a minimum instant of time, while in type-1 diabetic patient, it failed to re-attain the desired basal value. Consequently, a controlled exogenous insulin bolus is subsequently required to be injected in the patient’s body to attain euglycaemia.
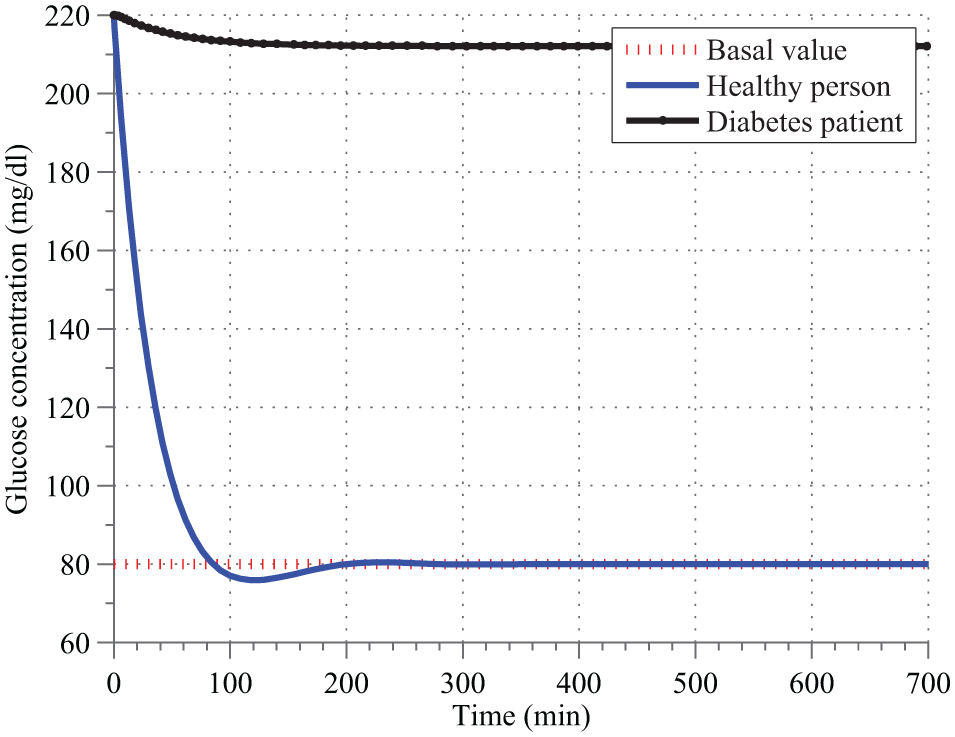
Internal glucose regulatory system of sick and normal person.
Stabilization of glucose–insulin regulatory system in the absence of disturbances
In this subsection, the performance analysis of the proposed control strategy with respect to plasma glucose–insulin regulation is demonstrated, while assuming that the system is not subjected to any external disturbances, that is, meal intake. Furthermore, the performance of uniform exact differentiator is also verified corresponding to the states estimation.
Figure 5 depicts the transient response of plasma glucose concentration in type-1 diabetic patient. It is quite evident that the proposed control strategy despite the initial occurred hyperglycaemia achieved euglycaemia in a very reasonable span of time. Moreover, the attained basal value is sustained with zero steady state error to avoid the critical conditions of hyperglycaemia thereafter. In Figure 6, the behaviour of plasma insulin concentration is clearly illustrated. Initially, when the hyperglycaemic situation exists, the amount of insulin exceeds the optimum value, but using the proposed control law, the standard insulin level is acquired in a minimum interval of time, which then withstands there with zero tracking error. Figure 7 demonstrates the control effort used for plasma glucose regulation. It is actually the output of the controller which decides the amount of insulin to be injected in type-1 diabetic patient. Note that the control effort is practically realizable and quite smooth with no sharp fluctuations.
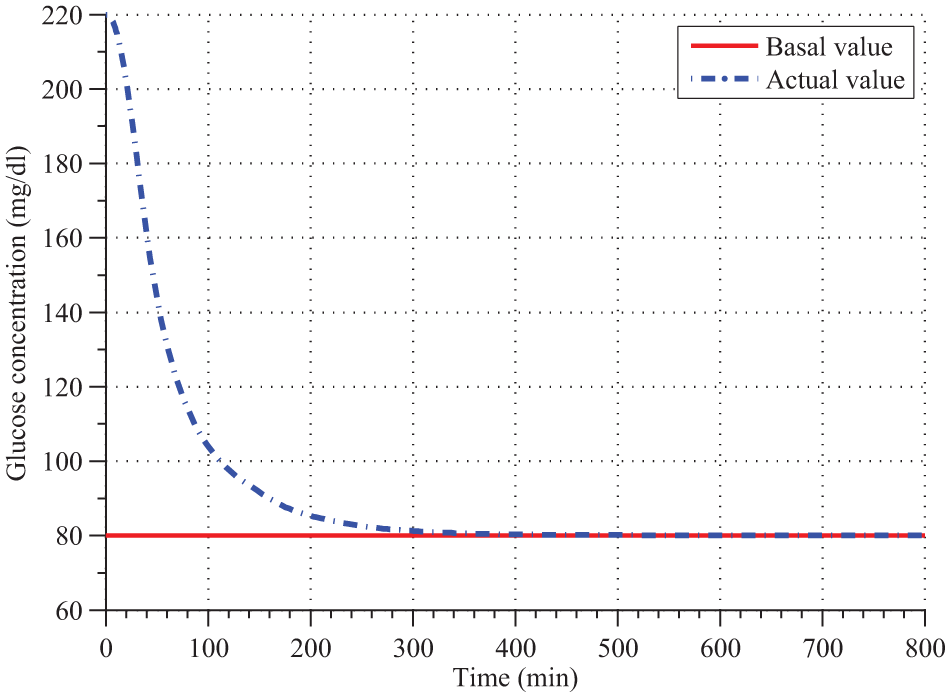
Stabilization of plasma glucose concentration in type-1 diabetic patient.

Stabilization of plasma insulin profile in type-1 diabetic patient.
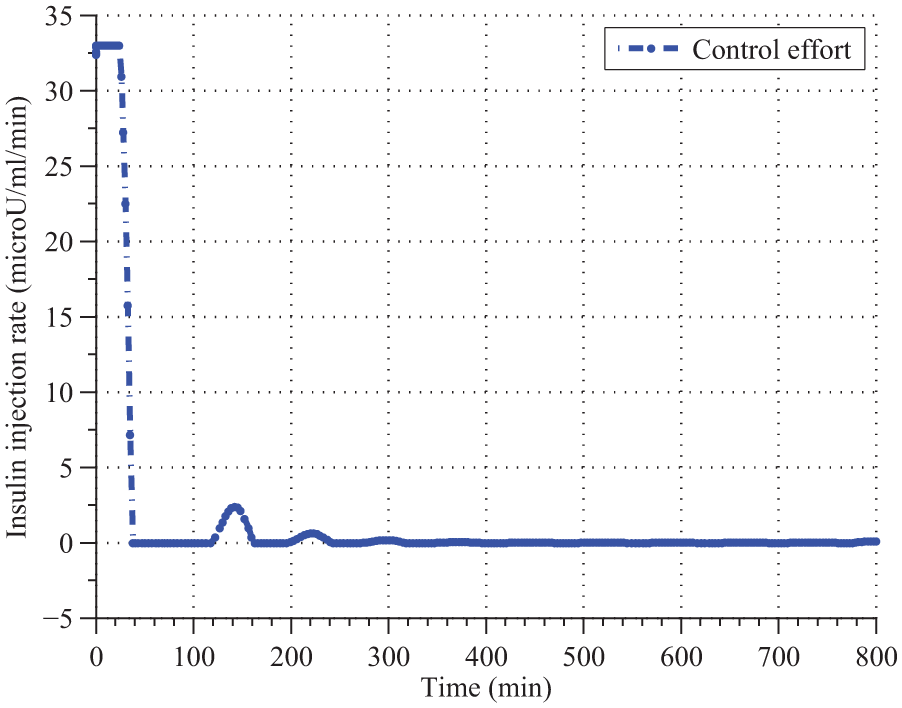
Control efforts corresponding to designed control algorithm.
In Figure 8, the performance of differentiator is depicted. The depicted results show very clear information about the unavailable states, which marks a positive sign on the performances of the differentiator.

Estimated state variables by uniform exact differentiator.
Performance in the presence of disturbances
This part demonstrates the effectiveness of the proposed control strategy in the presence of external disturbance (meal intake), on the plasma glucose–insulin concentration. As in type-1 diabetic patient, the internal glucose–insulin regulatory system is impaired; hence, an external meal intake is considered as disturbances to the system. The profile of external disturbance is defined by Fisher, known as Fisher’s meal disturbances, which is illustrated in Figure 9 with a mathematical representation expressed as in equation (3).

Disturbances profile proposed by Fisher.
Figure 10 displays the regulation of plasma glucose concentration in the presence of external perturbation. It is quite clear that primarily, when hyperglycaemia exists in type-1 diabetic patient, the propose control strategy attained the basal value quite nicely. But suddenly at t = 450 min, when the system is exposed to abrupt vanishing disturbance (meal intake), euglycaemia is disturbed. But due to the robust behaviour of the designed controller, the effect of the disturbances is countered in a very reasonable time with zero steady state error thereafter.

Stabilization of plasma glucose level in the presence of meal intake.
Figure 11 demonstrates the stabilization of plasma insulin profile at optimum value in the presence of external disturbances. It is apparent that the proposed control law regulates the insulin concentration at desired value in the presence of initially existing hyperglycaemia as well as in the presence of external disturbances which entered into system at

Stabilization of plasma insulin level in the presence of meal intake.
The control efforts of the proposed controller, to drive the plasma glucose concentration at desired value in the presence of external disturbances, is depicted in Figure 12. The outcomes clearly portrays that during the hyperglycaemic state, the proposed controller accomplished euglycaemia with a bit more efforts, which is within the reliable range. But with sudden meal intake at

Control effort in the presence of meal intake.
In Figure 13, the robust performance of the uniform exact differentiator in the presence of external disturbances is portrayed. It is quite clear that despite meal disturbances, the differentiator accurately estimates the state variables, which prove quite an suitable candidate for state estimations.

Estimated state variables by uniform exact differentiator in the presence of meal intake.
Conclusion
In this study, a robust integral SMC approach is designed for the stabilization of glucose–insulin regulatory system at optimum value. The designed control approach considered the integral switching manifold which eliminated the reaching phase. The eradication of reaching phase thus makes the system in-sensitive to most of the external perturbations. Moreover, the incorporation of integral term in the switching manifold suppressed the chattering phenomena, which is undesirable and may prove fatal in case of human interaction. In practical scenario, some of the state variables of the plant, that is, diabetic patient are not directly available to the designed controller, so a uniform exact differentiator in nested form is formulated to estimate the unavailable states variables. To certify the robustness of the proposed controller, the diabetic patient is exposed to external disturbance, that is, meal intake. However, it is confirmed that the designed controller, irrespective of disturbances, retains the nominal control performances. The effectiveness of the designed control strategy is verified via simulation results in MATLAB environment.
Footnotes
Handling Editor: Mohsin Raza
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.