
Abstract
This article investigates the problem of efficient spectrum access for traffic demands of self-organizing cognitive small-cell networks, using the coalitional game approach. In particular, we propose a novel spectrum and time two-dimensional Traffic Cooperation Coalitional Game model which aims to improve the network throughput. The main motivation is to complete the data traffics of users, and the main idea is to make use of spectrum resource efficiently by reducing mutual interference in the spectrum dimension and considering cooperative data transmission in the time dimension at the same time. With the approach of coalition formation, compared with the traditional binary order in most existing coalition formation algorithms, the proposed functional order indicates a more flexibly preferring action which is a functional value determined by the environment information. To solve the distributed self-organizing traffic cooperation coalition formation problem, we propose three coalition formation algorithms: the first one is the Binary Preferring Traffic Cooperation Coalition Formation Algorithm based on the traditional Binary Preferring order; the second one is the Best Selection Traffic Cooperation Coalition Formation Algorithm based on the functional Best Selection order to improve the converging speed; and the third one is the Probabilistic Decision Traffic Cooperation Coalition Formation Algorithm based on the functional Probabilistic Decision order to improve the performance of the formed coalition. The proposed three algorithms are proved to converge to Nash-stable coalition structure. Simulation results verify the theoretic analysis and the proposed approaches.
Introduction
The evolving 5G networks are expected to be composed of heterogeneous small cells1–6 (SCs; e.g. femtocells, picocells, and microcells), which have been seen as one of the most promising solutions for boosting the capacity and coverage of wireless networks by spatial reuse of frequency spectrum. SCs serve as offloading spots in the radio access network to offload users (OUs) and their associated traffic from congested macrocells. The SCs are expected to have certain degree of intelligence which can also be defined as cognition. In particular, cognition via spectrum sensing is foreseen as a potential solution for high-efficient spectrum access, which is the technology called cognitive radio.1,3,5 Darsena et al. 7 made significant research on the broadband cognitive radio wireless sensor network operating in a crowded spectrum scenario. Cognitive small cell (CSC) can opportunistically use the free orthogonal channels via spectrum sensing, that is, CSC can opportunistically use the channel which is considered free if the power received on that channel is smaller than the spectrum sensing threshold.8,9
For the dense and dynamical deployment of SCs, the centralized control in network management will be highly inefficient. Then, the importance of self-organization is highlighted, 10 and the key technical challenges are efficient distributed access management and distributed resource allocation.11–15 Under the self-organization mechanism, CSCs can sense and learn from their environment, autonomously tune their strategies for access management toward an optimal performance. In this regard, game theory 16 is seen as a typical and important mathematical tool that analyzes strategic interactions among CSCs. On one hand, non-cooperative game models have been studied to solve the distributed access management between SCs in the literature,17–23 where each SC focuses on its own utility while ignoring other SCs. On the other hand, the cooperation games, namely, coalitional games,24–27 have also begun to draw attentions in the researches on distributed access management between SCs,28–33 where SCs carry out cooperative access management through proper information exchange. In particular, considering the possible high-speed wired connection between SCs will make the cooperation cost very small, the cooperative access management scheme can obtain better performance. Saad et al. 24 introduced the coalitional game theory into wireless communication networks and proposed many significant fruits of its applications in recently years.2,33–37 With the user cooperation, authors proposed a selective-relay based cooperative spectrum sensing scheme in Zou et al., 38 and investigated a selective-relay spectrum sensing and best relay data transmission scheme for multiple-relay cognitive radio networks in Zou et al. 39 These works improved the performance of network significantly and also showed the importance of considering cooperation in the network.
Most existing works focus on the spectrum interference management to improve the network performance. However, the ultimate purpose of the access management is to complete the users’ data traffics, not only the interference control. Existing works have not paid enough attention to the users’ demand, that is, actual data traffics, and just assume that the traffics are all countless. In methodology, this assumption simplifies the system and facilitates the mathematical analysis and algorithm design, because the data traffic will have a great influence on the spectrum access decision. Actually, it is certainly not all users have countless packets to transmit all the time in practical scenarios, because the amount of data packets depends on the different applications, for example, video, message, audio, and picture. The traffics are usually limited and heterogeneous. As a result, considering the heterogeneous traffics, only interference management is not enough to obtain optimal performance, the traffic allocation optimization should also be taken into consideration.
With the existing coalitional game approaches on cooperative interference management,24–29 to the best of our knowledge, most of them focus on the stability of the coalition formation algorithm. The coalition formation speed and the performance of the formed coalition have rarely been paid attention to. However, in wireless networks, only stability is not enough, the efficiency must be considered.
To sum up, the following two aspects are still remained to be solved: in the concept aspect, the two-dimensional optimization needs to be studied to obtain better performance: interference management in the spectrum dimension and traffic cooperation in the time dimension; in the approach aspect, the efficiency of coalition formation need to be studied: the coalition formation speed and the performance of the formed coalition. The challenge is that how to realize efficient and stable coalitions which obtain the two-dimensional optimization in a distributed manner, under the heterogeneous traffics condition.
In this article, we focus on the problem of efficient spectrum access for the CSCs’ traffics, using the coalitional game approach. We propose a spectrum and time two-dimensional Traffic Cooperation Coalitional Game model, and then propose the Binary Preferring Traffic Cooperation Coalition Formation (BPTCCF) Algorithm, the Best Selection Traffic Cooperation Coalition Formation (BSTCCF) Algorithm, and the Probabilistic Decision Traffic Cooperation Coalition Formation (PDTCCF) Algorithm based on the proposed functional-order definition to improve the speed and performance of coalition formation, respectively. The main contributions of this article are summarized as follows:
To obtain the efficient spectrum access for CSCs’ traffics, we propose a Traffic Cooperation Coalitional Game model. Compared with the most existing models, the proposed model considers the optimization of the traffic access in spectrum dimension and time dimension at the same time.
To obtain the flexibility and generality of coalition formation approach, we propose a functional-order definition in the coalition formation rule. Compared with the traditional binary order which indicates strictly preferring action, the proposed functional order is defined as a functional value determined by the environment information, which indicates a more flexibly preferring action.
To improve the speed of coalition formation, we propose BSTCCF Algorithm based on the proposed functional Best Selection order. Compared with the traditional randomly selection in most existing works, the proposed BSTCCF Algorithm can converge to Nash-stable coalition structure rapidly.
To improve the performance of the formed coalition, we propose PDTCCF Algorithm based on the proposed functional Probabilistic Decision order. Compared with the traditional binary preferring relation in most existing works, the proposed PDTCCF Algorithm can asymptotically converge to Nash-stable coalition structure with better performance.
The rest of this article is organized as follows: In section “Related work,” we review the related work. In section “System model and problem formulation,” we present the system model and problem formulation. In section “Traffic Cooperation Coalition Game,” we formulate the Traffic Cooperation Coalitional Game model. In section “Traffic Cooperation Coalition Formation Algorithms,” we propose the Traffic Cooperation Coalition Formation Algorithms. In section “Simulation results and discussion,” simulation results and discussion are presented. Finally, we provide conclusions in section “Conclusion.”
Related work
The distributed access management and resource allocation researches for SCs have begun to draw attention,11–15 and the game theory 16 is seen as a typical and important mathematical tool that analyzes strategic interactions among CSCs. Non-cooperative game models have been studied to solve the distributed interference management between SCs in the literature.17–23 Dynamic channel selection, frequency reuse, and power control have been studied for SC networks in the literature11,17,18,19 In Ladanyi et al., 20 the overall transmit power is minimized by a distributed algorithm. Chandrasekhar and Andrews 17 investigated the problem of joint throughput optimization, spectrum allocation, and access control. In Sun et al., 22 an auction algorithm was proposed to allocate the subcarriers between macrocell users and femtocell users. Adhikary and Caire 23 investigated the potential of spatial multiplexing in non-cooperative two-tier networks.
The cooperation game models24–33 have also begun to draw attention, where SCs carry out cooperative interference management through proper information exchange. Saad et al. 24 introduced the concepts of cooperative game theory and the potential applications in communication and wireless networks. In Lee et al., 28 a cooperative resource allocation algorithm was proposed to investigate the inter-cell fairness in OFDMA femtocell networks. In Urgaonkar and Neely, 29 the femtocell users and macrocell users were allowed to cooperate. In Gharehshiran et al., 30 a game-theoretic approach was proposed to deal with the resource allocation. In Soret et al., 31 the spectrum efficiency was improved by a collaborative carrier aggregation mechanism. In Pantisano et al. 32 a partition form cooperative game was proposed for femtocell spectrum sharing.
However, the following points need to be studied further: (1) the actual data traffic determined by practical applications should be taken into consideration, (2) the speed of the coalition formation should be considered, and (3) the performance improvement of formed coalition should be studied further.
Our work differs from existing works in the following key aspects: (1) compared with most existing works, users’ traffics are not countless, but limited and heterogeneous, and the proposed model is a spectrum and time two-dimensional Traffic Cooperation Coalitional Game model; (2) compared with most existing coalitional game approaches,24–29 we not only pay attention to the stability of the coalition but also focus on the converging speed and the performance improvement of the coalition formation.
System model and problem formulation
System model
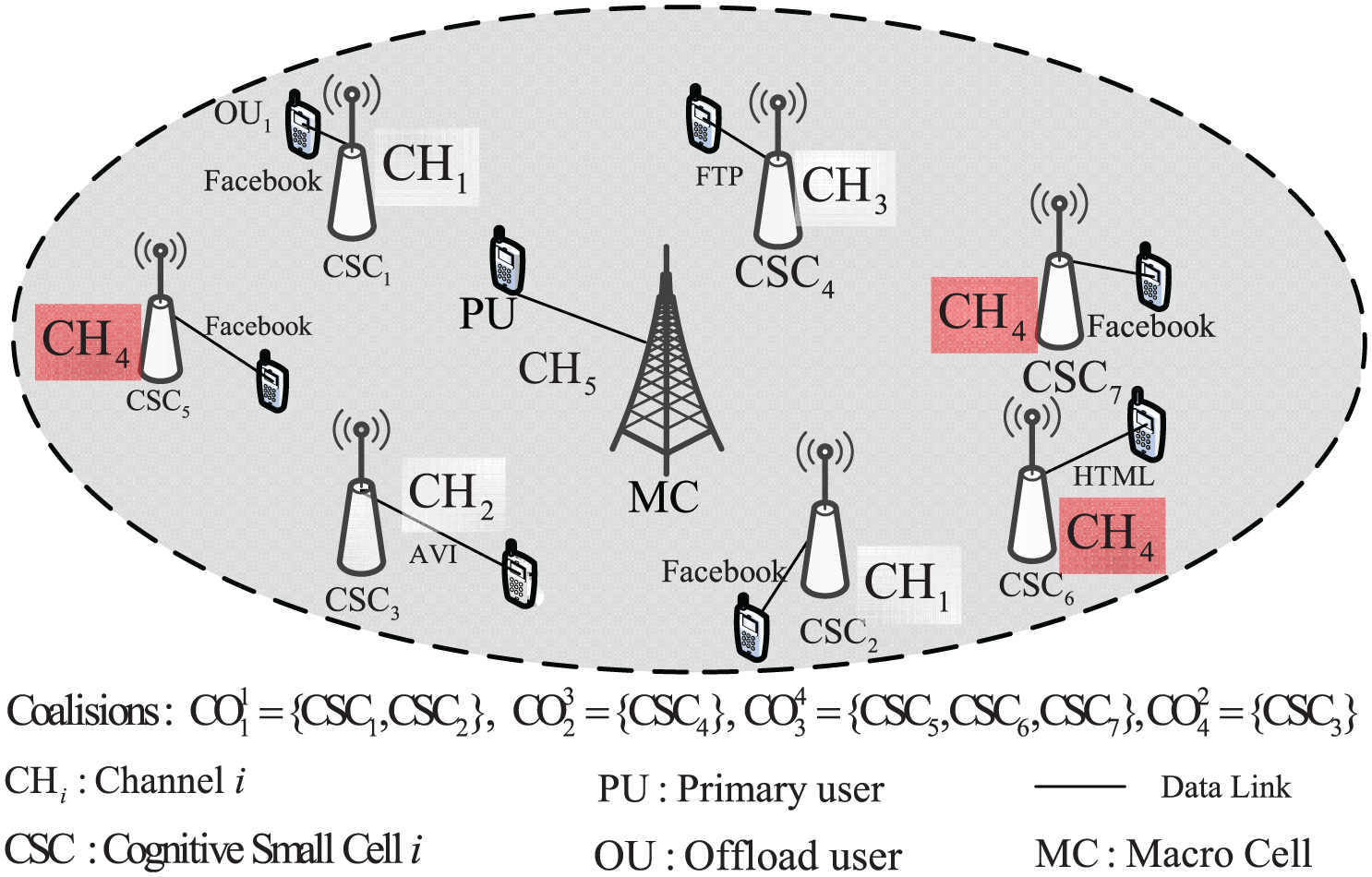
We consider a self-organizing CSC (types of SCs include picocells or femtocells that can be installed at home or at the office. 2 ) network consisting of N channels and M CSCs. The CSCs work in the opportunistic spectrum access (OSA) manner, that is, CSCs can opportunistically use the Primary User (PU)-licensed channels which are considered free by spectrum sensing.3,5 For example, in Figure 1, the channel 5 is occupied by PU, thus the CSCs can use channels 1–4. Collision happens if more than two CSCs use the same channel. We assume that CSCs adopt the parallel sensing strategy, 40 that is, a CSC only decides to sense and access one channel in a slot (Figure 2).
The system model.

The illustrative diagram of traffic cooperation in multi CSCs.
Importantly, we consider the actual demands of CSCs, that is, heterogeneous multimedia traffics, compared to the countless data assumption in existing works. In Figure 1, the current applications of CSCs are different, and the amount of data traffic to transmit is not countless, but limited and heterogeneous. For example, the data amount of
There are four idle channels, but seven CSCs, and it is impossible to allocate each CSC one channel even under the ideal interference management in existing works, so the traffic cooperation should be considered to improve the performance furthermore. For example,
Figure 2 shows an illustrative diagram of time slot in the traffic cooperation spectrum access optimization problem. We assume that the transmission structure follows a synchronous, slotted frame with slot duration T (PU is either absent or present during each frame duration).
3
The slot time T is divided into sensing duration (several
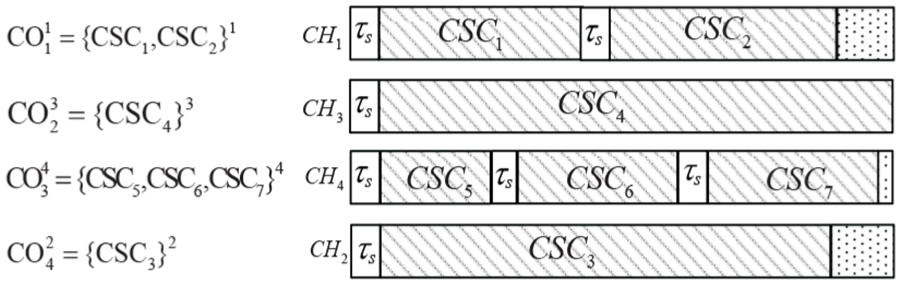
The illustrative diagram of the formed coalitions and the channel allocation.
Problem formulation
The main motivation of this article is to optimize the throughput of CSCs’ traffics, so we discard the assumption that CSC has countless data packets to transmit all the time in existing works and focus on the actual throughput obtained by the traffic, which is defined by transmitted data in the actually time spend, that is, if

where
The proposed traffic throughput definition is more practical because it is not that CSC has countless packets to transmit all the time in practical scenarios. Usually, in wireless network, the small data amount applications are commonplace, such as Facebook, HTML, QQ, and short message. In addition, the definition is more general by encompassing the large data amount situation as a special case, that is,
In the self-organizing CSC network shown in Figure 1, there may be more than one CSCs in different coalitions attending to access the same channel, then a collision may occur under this situation. For

where
In the coalition

By combining equations (1)–(3), denoting

where
It should be noted that the throughput is determined by the following main factors: the data amount of traffics, the coalition selection, the channel selection, and the other CSCs’ interference. For coalition

In the perspective of global network, the network throughput is given by

The goal is to find the stable coalition structure
Traffic Cooperation Coalition Game
In this section, we propose the Traffic Cooperation Coalition Game model to solve the problem of efficient spectrum access for traffics in distributed self-organization CSC networks.
Definition 1
Define the Traffic Cooperation Coalition Game as
Definition 2 (utility function)
For individual player m, we define the utility function as the throughput in coalition

Denote the current coalition structure as
where
Definition 3 (Pareto improving utility function)
We assume that any player’s actions need to meet the Pareto improving condition.
20
For any candidate action

The Pareto improving condition implies that the player’s action is to improve its individual profit without hurting other players, which has been widely used in coalitional game, such as in the literature.2,36,37
Definition 4 (traditional Binary Preferring order)
Similar to the previous studies2,32,40,41 for player

Note that,

Then, based on the binary preference order, player m’s action

The action decision means that the play m will strictly select the coalition to obtain better throughput, from the given two candidate coalitions where the Pareto improving condition is met.
Definition 5 (Functional Preference order)
Unlike the traditional binary and strictly preference order in Definition 2, we propose the Functional Preference order to give a more general and flexible preferring action: for player
Remark 1
Note that the action
Definition 6 (Best Selection order)
Based on the Functional Preference order, we propose the Best Selection order as follows: for player

The proposed Best Selection preference function design means that the player strictly prefers the best coalition from all the possible coalitions which meet the Pareto improving condition. Note that the preferring action is based on the comparison among all the possible coalitions, not the comparison between two given coalitions in the traditional Binary Preferring order.
Definition 7 (Probabilistic Decision order)
Based on the Functional Preference order, we propose the Probabilistic Decision order as follows: for player

The proposed Probabilistic Decision preference function design means that the player tends to choose the better coalition from the possible candidate coalitions with higher probability. Also, the candidate coalitions need to meet the Pareto improving condition.
Traffic Cooperation Coalition Formation Algorithms
We propose a three distributed coalition formation algorithms based on the above defined orders and investigate their properties.
The BPTCCF Algorithm
The procedure of algorithm: the BPTCCF Algorithm is based on the Binary Preferring order in Definition 4. The procedure of the algorithm is shown in Algorithm 1.
The stability analysis: the stability is one of the key properties of coalition formation algorithm; we analyze the stability of the proposed BPTCCF Algorithm as follows. The method of analysis follows the way in the literature.2,34–37

Definition 8 (Nash-stable structure)
A coalitional structure
A Nash-stable structure means that no player has an incentive to change the current status: deviating from its current coalition to another coalition or choosing the non-cooperative status to form a singleton coalition of itself.
Theorem 1
Starting from any initial coalition structure
Proof
Similar to the analysis in the literature,2,34–37 the coalition structure varies in each CSC’s action in Stage 2 of Algorithm 1. Since the number of CSCs and number of channels are finite, the maximum number of possible coalition structures is the Bell number. 24 Then, the number of structure transformations is finite. In other words, under the binary preferring action rule which is based on the Pareto improving condition, the structure transformation will always terminate. So, the convergence of the algorithm is guaranteed. Thus, the theorem is proved.
Theorem 2
Starting from any initial coalition structure
Proof
Suppose that the final coalition structure
The BSTCCF Algorithm
This BSTCCF Algorithm is based on the Best Selection order in Definition 6. The procedure of the algorithm is shown in Algorithm 2.

Similar to Algorithm 1, the proposed BSTCCF Algorithm will always converge to a final coalition structure
Remark 2
Compared with the BPTCCF Algorithm, the main difference is that each player chooses the best action from all the candidate actions, rather than a random good action. The convergence speed of the BSTCCF Algorithm will be much faster than the BPTCCF Algorithm. However, the performance of BSTCCF Algorithm may be worse, because the current best action may deviate from the better coalition structure in the perspective of long term. The details about convergence speed and performance will be discussed in the simulation.
The PDTCCF Algorithm
1. The procedure of algorithm: The PDTCCF Algorithm is based on the Probabilistic Decision order in Definition 7. The procedure of the algorithm is shown in Algorithm 3.

In Stage 2(b), the probabilistic decision-making rule (Boltzmann exploration strategy
37
) is introduced in order to escape from local optimal points and finally converge to the Nash-stable coalition structure. The parameter
Remark 3
Compared with the BPTCCF Algorithm and the BSTCCF Algorithm, the main difference is that the action choosing is not the absolutely choosing, but a probabilistic choosing according to some probability distribution. The PDTCCF Algorithm actually is a trade-off of speed and performance in coalition formation. The converging speed of PDTCCF Algorithm will be slower than the BSTCCF Algorithm. However, the performance of PDTCCF Algorithm will be better than the BPTCCF Algorithm and the BSTCCF Algorithm, because the current best action may deviate from the better coalition structure in the perspective of long term. Actually, the probabilistic decision gives a chance for the system to stay in some tentative suboptimal states for evolving to the better final solution. The details about convergence speed and performance will be discussed in the simulation.
2. The stability analysis:
Theorem 3
With a sufficiently large
Proof
Similar to the analysis in the literature,2,34–37 the coalition structure varies in each CSC’s action in Algorithm 3. Since the number of CSCs and number of channels are finite, the maximum number of possible coalition structures is the Bell number.
24
Suppose player m’s action strategy space is

That means the action decision tends to be absolutely choosing rather than probabilistic choosing when
Denote the final coalition structure
Theorem 4
Starting from any initial coalition structure
Proof
Suppose that the final coalition structure
Simulation results and discussion
In this section, we evaluate the performance of the proposed algorithms by MATLAB simulations. Without loss of generality, the parameters are set as follows: the fixed frame duration T = 100 ms. The sensing time of each channel
In Figure 4, we consider a four-CSC scenario to evaluate the performance of the proposed approaches. Since there are four channels available for four CSCs, the performance of “No Coalition” is well. This is the typical scenario where the number of CSCs is less than the number of channels, and the interference can be avoided by traditional interference management method.

The performance of proposed algorithms in a four-CSC scenario:
Even though, the proposed traffic cooperation approaches also get better performances. Under the limited traffic condition, it is not optimal anymore by allocating each channel to each CSC, respectively, as the traditional interference management method. The better approach needs to realize the match between the traffics and channels. For example, in the stable coalition structure of Probabilistic Decision Coalition (PDTCCF Algorithm), CSC4 would rather choose to share channel 4 with CSC2, than choose the idle channel 1. Because the capacity of channel is much worse than channel 4, sharing channel 4 with CSC2 will obtain better throughput.
It can be seen that the proposed algorithms converge to the stable coalition structures. The stable structures are given in the figure. We can see that the converged structures are different because the order functions are different. Note that the stable structure may not be the optimal coalition structure. For example, in the stable structure of Binary Preferring Coalition (BPTCCF Algorithm), compared with the stable coalition structure of Probabilistic Decision Coalition (PDTCCF Algorithm), the CSC1 should tune to channel 2 in the perspective of network throughput. However, for CSC1 itself, it would choose channel 3 to obtain better throughput. Then, the coalition structure of BPTCCF Algorithm will never turn into the better structure as the structure of PDTCCF Algorithm since CSC 1 has occupied channel 3 early. The Probabilistic Decision Coalition (PDTCCF Algorithm) can achieve best converged stable coalition structure because the probabilistic decision gives a chance for the system to stay in some tentative suboptimal states for evolving to the better final solution. This analysis also applies to the Best Selection Coalition (BSTCCF Algorithm), which has the worst converged performance and the fastest converging speed.
In Figures 5–7, we simulate 6-CSC, 8-CSC, and 10-CSC scenarios, respectively, to investigate performances of proposed algorithms under the “heavy load” condition, where the number of CSCs is bigger than the number of channels. Note that, in practical applications, the “heavy load” is commonplace, such as Wi-Fi system where multi users share three channels.
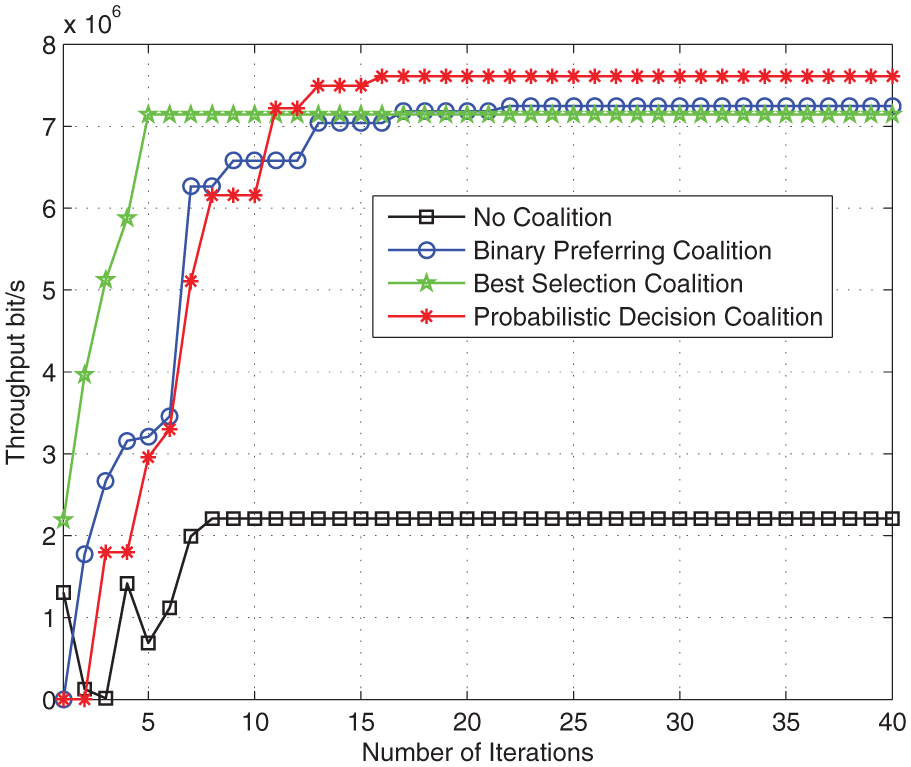
The performance of proposed algorithms in a six-CSC scenario:
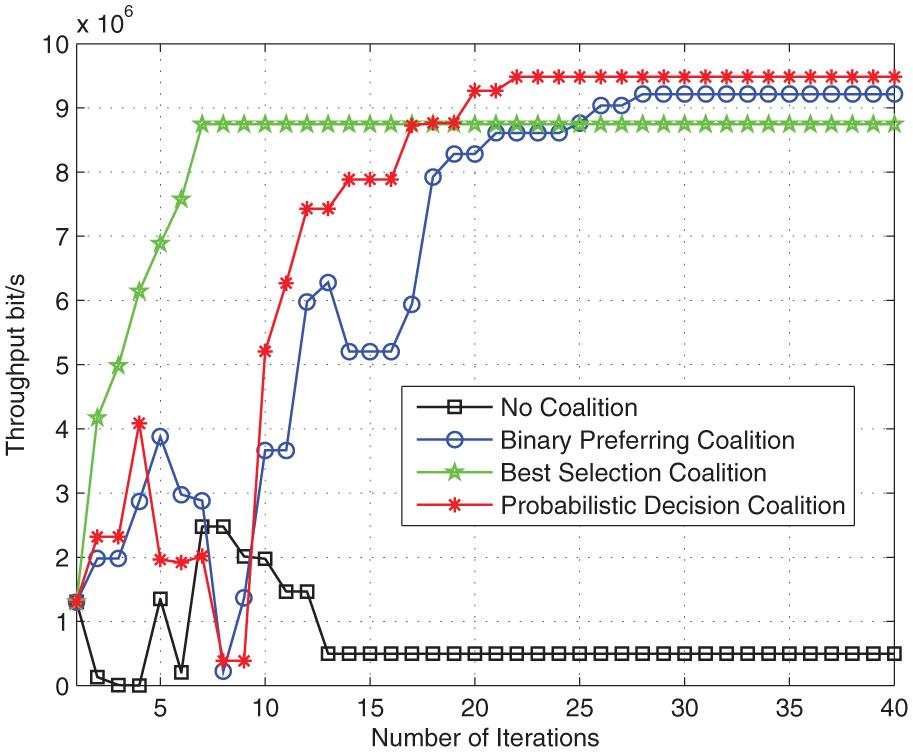
The performance of proposed algorithms in a eight-CSC scenario:

The performance of proposed algorithms in a10-CSC scenario:
Under this “heavy load” condition, the traditional interference avoid mechanism could not work well, because there are not enough channels. When the number of CSCs increases, the performance of “No Coalition” decreases rapidly for the serious interference.
The proposed traffic cooperation approach shows its advantage by considering both spectrum and time at the same time, based on the actual demands of CSCs’ traffics and channel capacities. The proposed algorithms could also realize the match between the traffics and channels to achieve better throughput. Also, the convergence of the proposed algorithms is verified. Again, the stable coalition structures of different algorithms are different.
The above simulation results are all the one-time experiment results. They show the details of the formulated coalitions as the illustrations. Due to the random result in the experiments, the performance improvement trend is not so clear. To avoid the random result in one-time experiment, we use the average value of 500 independent experiments results to show the average performances of different methods. Figure 8 shows the convergence and performance of the proposed algorithms furthermore. The result shows that the system tends to the converged state as the learning iteration increases. The proposed “Best Selection Coalition” algorithm has the fastest converging speed, and the proposed “Probabilistic Decision Coalition” algorithm has the best system performance and relatively slow converging speed. The traditional “Binary Preferring Coalition” algorithm also converges.

The average performance of 500 independent experiments. The parameters are same with that in Figure 7.
Figures 9 and 10 show the converged performance of proposed algorithms. In Figure 9, the converging speeds of proposed three algorithms are compared. In Figure 10, the converged stable network throughputs are compared. Among the proposed three coalition algorithms, the Best Selection Coalition (BSTCCF Algorithm) has the fastest converging speed. The Probabilistic Decision Coalition (PDTCCF Algorithm) has the best converged performance. The traditional Binary Preferring Coalition (BPTCCF Algorithm) has the slowest converging speed and just accepted performance.

The converging speed comparison of the proposed algorithms.

The stable throughput comparison of the proposed algorithms.
It can be seen that the proposed functional order is more flexible compared with the traditional Binary Preference order. When we focus on the converging speed, we can choose the Best Selection order. When we focus on the converged performance, we can choose the Probabilistic Decision order. Furthermore, we can also design other function orders according to the demands and scenarios. In all, the proposed traffic cooperation approaches could obtain much better performance than the traditional none-coalition interference management method, especially when the number of CSCs is bigger than the number of channels where the interference avoid could not be realized by traditional no-traffic coalition method.
Conclusion
In this article, we investigated the problem of efficient spectrum access for traffic demands of self-organizing CSC networks. We proposed a spectrum and time two-dimensional Traffic Cooperation Coalitional Game model which aims to realize the efficient spectrum access for CSCs’ traffics. With the approach of coalition formation, the proposed functional order indicates a more flexibly preferring action compared with the traditional binary order in most existing works. We proposed three coalition formation algorithms to solve the distributed self-organizing traffic cooperation coalition formation problem, which have been proved to converge to Nash-stable coalition structure. Simulation results verified the theoretic analysis and the proposed approaches.
Footnotes
Handling Editor: Donatella Darsena
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by China Postdoctoral Science Foundation Project, No. 2018M633684.