
Abstract
Distributed sensor networks with a great number of sensors realize information gathering, transmitting, and controlling, which will greatly improve the reliability and efficiency of industrial infrastructure systems, such as cyber-physical power system. Cyber-physical power system is one of the heuristic systems tightly coupled by a continuous-time electrical power system and a discrete-time information system. The transmitting latency, packets disorder, or loss will fail system convergence, even unstable under disturbance. This article studies the effect of long latency on cyber-physical power system frequency stability based on network control theory and establishes a heuristic model to express the continuous-time distributed generation system and the discrete-time distributed sensor network. A new state feedback controller is designed based on the stochastic optimal control theory to solve the micro-grid’s frequency stability problem with stochastic latency disturbance. Finally, we have conducted an extensive evaluation study using a real distributed generation micro-grid system. The simulation results show that the new controller reduces the influence of distributed sensor networks transmitting latency on the frequency stability, and the frequency dynamic process in the distributed generation micro-grid has smaller overshoot and obtains faster dynamic response speed.
Keywords
Introduction
With the construction of smart grid, the traditional power system has gradually developed into the cyber-physical power system (CPPS) which is one of the heuristic systems tightly coupled by electrical power system and information system.1,2 CPPS integrates ubiquitous sensors, communication networks, and high-performance information processing system. 3 It combines real-time monitoring, data transmitting, dynamic controlling, and information service. Distributed sensor networks (DSNs), with their various sensors, self-organized communication network, and data-centric service, become one of the key techniques in CPPS. 4 As we know, stochastic transmitting latency is one of the shortages in DSN, compared with wired communication network. 5 And, the tens or even hundreds of milliseconds latency may cause CPPS control failure, which will make the electrical power system, the other side of tightly coupling, lose stability and fall into abnormal operation state. It results in significant economic losses and adverse social impact. Compared with traditional electrical power system with less monitoring or local measurement data and offline calculation, aware stochastic transmitting latency in CPPS control is a new problem.
In recent years, with the development of network control theory, scholars begin to research on the relationship between the transmission network and industrial control system. Network control system (NCS) is a type of closed-loop space-distributed control system. Each unit, such as sensors, controllers, and actuators, is distributed in different geographical locations, and they are connected by communication networks. Control methods with simplified network models with constant latency or packet loss rate are studied.6,7 But, a CPPS controlling distributed generation and variable power load is one of the more complex networks and measuring data transmitting with stochastic transmitting latency. Therefore, there are two main difficulties; we proposed (1) to establish a frequency-controlled uncertain state space model of micro-grid, which is more consistent with the actual system considering the observation noise and (2) a controller to solve the micro-grid’s frequency stability problem with stochastic latency disturbance. This article deeply studies the effect of stochastic latency on CPPS frequency stability based on network control theory and established a heuristic model to express the continuous-time distributed generation system and the discrete-time communication system of micro-grid. A new the stochastic optimal state feedback controller is designed to stabilize power system frequency.
The remainder of the article is organized as follows: section “Background and related work” briefly reviews related work in the field. In section “Heuristic model of CPPS,” the heuristic model of CPPS is established, and the stochastic optimal state feedback controller in CPPS is proposed in section “Stochastic optimal state feedback controller designed in CPPS.” Section “Experiments, results, and algorithm performance evaluation analysis” presents the experimental results under different types of transmitting latency scenarios, and the frequency dynamic response control with different controllers are also evaluated. We conclude the article in section “Conclusion.”
Background and related work
In the study of NCS, Chen and Liu 6 established an ideal communication model and then used the Lyapunov stability theory to reduce the system’s output error. Dong et al. 8 used H∞ norm constraints and linear matrix inequalities to obtain feedback control gain and system stability criterion. In Pang et al., 9 the output tracking error was converted to an additional state, and then, solving the output tracking problem is same as solving an augmented system stabilization problem. Based on the observer of the original state increment and the feedback of the output tracking error, a model-based networked predictive output tracking control scheme was proposed to compensate transmission latency. Shi and Yu 10 formulated a closed-loop system as a special jump linear system and designed an output feedback controller based on mixed H2 and H∞ robust control theory. In Bai et al., 7 based on Lyapunov theory and linear matrix inequality methods, the sufficient and necessary condition for robust stability with transmission delay less than one sampling period and fixed delay is presented. The sufficient conditions for the stability of discrete switched systems with variable delays were studied in Nayeripour et al., 11 and an algorithm with calculating a set of linear matrix inequalities to obtain state feedback controller was presented.
Besides the theoretical research, some scholars also tried to using NCS in industrial and energy fields. Bevrani and Hiyama 12 simplified the load frequency control problem as a static output feedback control problem and used proportional–integral (PI) control to design a robust decentralized PI controller. The latency in automatic generation control system is studied in Duan and He, 13 and a time-delay system control algorithm was proposed.
From all the above analyses, the previous control methods always simplified the stochastic transmitting latency from communication network as constant, such as a fixed time slot less than one sampling period. But the topology of CPPS is more complex and there is serious electromagnetic noise, which reduce the DSNs’ transmission performance and result in stochastic transmitting latency. In this article, the micro-grid system with distributed generation system and storage is taken as the object to study the frequency stability when the long time-delay occurs in the control network. The continuous-time model of electrical power system and discrete-time model of DSNs with stochastic transmitting latency are established, and a new state feedback controller is proposed based on the stochastic optimal control theory.
Heuristic model of CPPS
Micro-grid model with distributed power generations
In many remote areas, micro-grid with diesel power generation is often used as the main standby power supply mode. With the increasing price of petroleum and the maturity of renewable energy technology, such as photovoltaic (PV) power and fuel cell power generation, cleanly distributed generations are more and more used in micro-grid as one type of power complementary.14,15 Monitoring the operating status of distributed generations and controlling each part of power generation units are necessary to keep the stability of micro-grid system. 16 A CPPS structure of micro-grid is shown in Figure 1.

CPPS structure of micro-grid.
In Figure 1, dashed lines represent the flow of information. The distributed generation system consists of calculation control devices, data sensors, and electric devices. Information is exchanged by communication network, in which there are two parts of transmitting latency. One is, τca, the process from data sensors to the control center, and the other is, τac, from the control center to each actuator, such as distributed power generating units to adjust the operating status.
The latency τ = τca + τac makes not only the control center lose the ability to monitor the system but also the actuators unable to execute the correct issue instruction in time, which destroys the stability and leads to the frequency instability of the system.17,18 A typical micro-grid system as an experiment example is employed to simulate the influence of communication transmission delay on system stability. There are one 150-kW diesel generator, one 120-kW micro gas generator, one 50-kW wind power generator, one 30-kW PV system, and one fuel cell energy storage system with the rated power as 50 kW. At 1.5 s, the power load reduces 10% suddenly. Figure 2 shows the frequency fluctuation curve with different transmission latencies, in which Δf = f − fref is the frequency deviation. fref is the reference frequency.

Influence of communication delay on grid frequency.
From the experimental results, if there is no latency in the network, then the frequency of micro-grid can quickly smoothen during a disturbance processing; if there is 0.2 s transmitting latency, then the frequency of micro-grid can also be stabilized finally, but the regulation time increases significantly, from 3 s to 10 s, shown as a black curve; if the latency is 0.6 s and 1 s, then the micro-grid system’s frequency will not remain stable and the self-excited oscillation occurs. Based on the experiment results, the transmitting latency from communication network not only reduces the system convergence speed but also has the possibility to destabilize the system.
Continuous-time system mathematic model for micro-grid
A control mathematic model of the micro-grid with distributed generation system is presented in Figure 3. The distributed generation system consists of m diesel power generation systems, n PV power generation units, and one fuel cell generators. Each power generation unit receives frequency modulation task with participation factor α. For diesel power generation system, this article considers the speed governor and the turbine, which are described by first-order transfer function, and describes the PV and fuel cell power generation with simplified first-order transfer function. 11

Model of distributed generation system.
Here, α1p (p = 1, 2, …, m), α2q (q = 1, 2, …, n), and αF are the participation factors of distributed power generations and they meet

where Deq and Meq are the micro-grid system’s equivalent damping and inertia, respectively, which can be calculated by formula (2)

D 1p and M1p are damping coefficients and inertia of diesel generator, respectively; D2q, M2q, DFC, and MFC are equivalent damping coefficients and equivalent inertia of PV power generation system and fuel cell power generation system, respectively. Each diesel power generation system meets the following relationships

Each PV unit meets the following relationships 19

The fuel cell power generation system meets the following relationships 20

The following formula should be satisfied among the increment of power generation, the load variation of micro-grid, and the frequency shift

Besides, the frequency deviation factor β can be calculated by formula (7)

In this article, the state variable is

where

In the model, the power load fluctuation of micro-grid ΔPd(t) is the power loads’ fluctuation, which is a random distribution with zero-means.
21
To be consistent with the actual system operating status, observation noise

where
Discrete-time system mathematic model of DSNs
To collaborative control continuous-time power system and discrete-time communication network, this article discretized the continuous-time model, formula (9), into a discrete-time model with the sampling period T, in which the upper bound of transmitting latency is τ. The electrical values sampling period T is defined with “IEC 61850-Part 5: Communication Requirements for Functional and Device Models” or “Q/GDW 131-2006: Real-time Dynamic Monitoring System Technical Standard of Electric Power System.” In this article, T is selected 10 ms, the fastest one among three grades of 40, 20, or 10 ms defined in the Q/GDW 131-2006.
In order to study the problem conveniently, this article makes the following assumptions: (1) sensors are all time driven, and the controllers and actuators are event driven. (2) Latency in network control is bound and subject to a certain probability distribution. (3) Random sequences {
Considering the bounded latency τ, two issues can be easily represented: one is τ > μT, where μ is a positive integer. It can be treated as packet lost with enough long transmission latency, which is one type of system failures because of control instructions lost. Fault tolerant control approach can solve this problem, which is not in this article’s research scope. The other one is 0 ≤ τ < μT, which means the control instruction arrives with a stochastic latency. This article uses the stochastic optimal control theory to solve this issue.
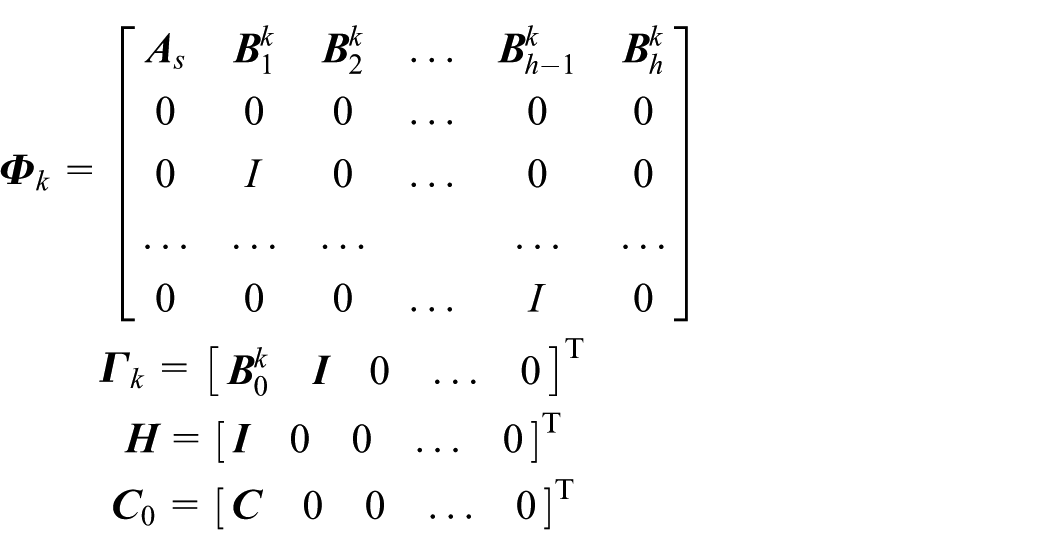
Because of the event driven, the control signal u(t) arrived at controlled object is piecewise continuous within a sampling period [kT, (k + 1)T), and it has at most h + 1 number of different values. It is assumed that the piecewise continuous values of u(t) occur at time points

where

Time sequence diagram of signal transmission in NCS.
Stochastic optimal state feedback controller designed in CPPS
In CPPS with stochastic transmitting latency, the obvious characteristics are as follows: (1) because of the stochastic long transmitting latency, the intermittency and fluctuation of renewable energy, and the randomness of the power load in micro-grid, it is hard to obtain the state feedback controller with zero-pole placement algorithm; (2) it is difficult to directly measure all of the state variables in an actual system because of system noise. So, it is necessary to design the observer to obtain full state variables. The Kalman observer and the state feedback controller will be designed, respectively, in this article.
Design of Kalman observer
Kalman observer can obtain the optimal state estimation signal

where P satisfies the following the Riccati algebraic equation


Structure of Kalman observer.
Design of stochastic optimal state feedback controller
From the discrete stochastic optimal control theory, the control performance index in the case of the selected state variable

where
Since the discrete-time state equation in formula (10) contains {

where
The control system performance index J can be calculated as formula (15)

where

The control strategy is

Control system block diagram based on the stochastic optimal control theory.
Experiments, results, and algorithm performance evaluation analysis
Experiment settings and parameters
In the experiments, the micro-grid with distributed generation system consists of two identical diesel generators, two identical PV power generation systems, and a fuel cell power generation system. The two diesel power generation systems are homogeneous, in which the time constant of governor is TG = 0.1 s, time constant of steam turbine is TT = 0.3 s, damping coefficient of generator is M = 0.15, inertia is D = 0.1, and the frequency modulation participation factor is α = 0.4. Two PV power generation systems are also homogeneous, in which the equivalent time constant is Tpv = 1.8 s, equivalent damping coefficients is M = 0.1, equivalent inertia is D = 0.15, and the frequency modulation participation factor α = 0.075. For the third type of power generation, fuel cell, the time constant TFC = 0.25 s, equivalent damping coefficients M = 0.14, equivalent inertia D = 0.05, frequency modulation participation factor α = 0.05. The rated frequency of micro-grid is 50 Hz, the three weight matrices
Different sampling period for discrete-time systems
During the process of discretizing one continuous-time model into a discrete-time model, the sampling period T will directly affect the accuracy of dynamic process description. In Figure 7, the black curve is the continuous-time dynamic response. We set three different sampling periods T = 0.1 s, T = 0.01 s, and T = 0.001 s to evaluate the discrete-time systems’ frequency dynamic response tracking performance.

Influence of sampling period on system.
The experiment results show that, when the sampling period is 0.1 s, as a long sampling period, sensors can’t acquire and transmit the system status in time. The controller cannot track the dynamic response completely, shown as the green curve. When the sampling period is too short, as T = 0.001 s, the maximum frequency deviation of the discrete system is too large to tolerate, Δf = 0.6 Hz. Only the sampling period is selected as 0.01 s, the dynamic response red curve of the discrete-time system coincides with the target curve, which can accurately describe the dynamic process of the system. The experiment results show that the overshoot of frequency deviation is reduce from 0.6 Hz (T = 0.001 s) to 0.14 Hz. In the following experiments, the sampling period is set 0.01 s to obtain the good control performance.
Evaluated controller performance in the constant transmitting latency
In the first experiment, we evaluated the proposed state feedback controller performance with the constant transmitting latency, compared with H2 controller proposed in Matni. 22 The frequency dynamic response curves are shown in Figure 8 under different transmitting latencies: 0.2, 0.6, and 1 s.

Frequency dynamic response with constant transmitting latency: (a) frequency response with τ = 0.2 s, (b) frequency response with τ = 0.6 s, and (c) frequency response with τ = 1 s.
Figure 8 shows that, in different transmitting latencies, the proposed state feedback controller has good frequency dynamic response performance. The maximum frequency deviation kept to 0.06 Hz, compared with the 0.12 Hz by H2 controller. The response speed is 5 s with the 0.2 s latency scenarios, 7 s with the 0.6 s latency scenarios, and 8 s with the 1 s latency scenarios. But in the same experiment scenarios, the response speed by H2 controller is 8, 12, and 15 s, respectively. Less frequency deviation and faster response speed bring the better system control performance.
Evaluated controller performance in the stochastic transmitting latency
More general scenarios coinciding with the real DSN in CPPS are employed in the experiments, in which the transmitting latency is stochastic with three different intervals [0, 0.2 s], [0, 0.6 s], [0, 1 s]. The system frequency response with different controller is shown in Figure 9.

Frequency response with stochastic transmitting latency: (a) frequency response when τ = 0 ~ 0.2 s, (b) frequency response when τ = 0 ~ 0.6 s, and (c) frequency response when τ = 0 ~ 1 s.
The results from Figure 9 show that, compared with the H2 controller, the proposed state feedback controller also has better frequency dynamic response performance in the stochastic transmitting latency scenarios. Analyzing the results in detailed, the maximum frequency deviation kept to 0.05 Hz, compared with the 0.1 Hz by H2 controller. The response speeds are 5, 9, and 12 s in different latency intervals. In the same experiment scenarios, the response speed by H2 controller is 8 s in [0 0.2 s] latency interval, and great longer than 15 s with the [0 0.6 s] and [0 1 s] latency intervals. Long-term frequency oscillation will damage the electrical equipment and induce the cascade failures, which cannot be tolerated in the electrical power system.
Conclusion
CPPS with DSNs technique is widely used in electric power system. Cyber failure will induce the physical malfunction, even power system breakdown. Therefore, new network control theory and feedback controller should be studied to increase the capability of system robustness. In this article, state feedback controller aware stochastic transmitting latency is proposed. The heuristic model with continuous-time power system and discrete-time DSNs is established. A new state feedback controller co-operated Kalman observer is presented based on the stochastic optimal control theory. The experiment results show that the proposed controller effectively reduces the frequency deviation and obtain a faster response speed, which is beneficial to increase the capability of system’s frequency stability and improve the power supply quality.
Footnotes
Handling Editor: Christos Anagnostopoulos
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (2017YF B0903000) and the National Natural Science Foundation of China (61571324).