
Abstract
Internet of Vehicles has become a promising way to realize the evolution from vehicular ad hoc networks and next-generation intelligent transportation system into future autonomous driving scenarios, clean-energy intelligent vehicles, and Smart Cities. However, multicasting service messages on available service channels and periodic exchanges of beacon messages on control channel cause the problem of efficiently scheduling those messages via multichannel transmission for intelligent vehicle terminal, to support real-world applications in Internet of Vehicles scenario. In this article, we investigate the intelligent vehicle terminal architecture and, particularly, design the wireless communication board by incorporating multicasting and congestion control modules. Especially, we present a multicast data delivery scheme with random-delay lowest-cost constraint to transfer service messages on service channels. Furthermore, a priority-aware congestion control scheme is also proposed by considering differentiated priorities of beacon messages on control channel, to cope with the congestion problem at bottleneck vehicle node. Based on the proposed schemes, we build up the RanLow (Random-delay Lowest-cost) module and the priority-aware congestion control (PARCEL) module by enabling multicasting and congestion control together in wireless communication board of the intelligent vehicle terminal architecture. Finally, the experimental results and comparison show that our devised RanLow module and PARCEL module are feasible and more efficient than existing schemes.
Keywords
Introduction
Problem and motivation
As an emerging vehicle-oriented mobile Internet of Things (IoT), Internet of Vehicles (IoV) provides a dynamic mobile communication system that communicates with its internal and external environment by creating the interactions of vehicle-to-sensor, vehicle-to-vehicle, vehicle-to-road infrastructure, vehicle-to-Internet, and so on.1–3 With the help of on-board units (OBUs) or on-board sensors installed on vehicles and road-side units (RSUs) deployed along the sides of roads or highways, IoV is highly characterized by gathering, sharing, processing, computing, and secure release of data services onto information platforms. 2 Compared with traditional intelligent transportation system (ITS), IoV puts more emphasis on expanding interactions and connections among vehicles, drivers, passengers, and RSUs, aiming to accommodate for fifth generation (5G)-enabled vehicular networks. 4 To this end, the primary goal of IoV is to make drivers obtain the real-time road traffic information easily, to improve the road safety for drivers, to provide passengers with the travel convenience and comfort, to enjoy the existing Internet-based services (e.g. video conference, gaming, content sharing, and Web surfing), and to further benefit from big data applications through fog computing.5–7 In addition, IoV can be also deemed to a superset of vehicular ad hoc networks (VANETs). The network scale, structure, and applications of VANETs are also been extended by IoV. It goes without saying that IoV has become a promising way to realize the evolution from VANETs and next-generation ITS into future autonomous driving scenarios, 7 clean-energy intelligent vehicles, 8 and Smart Cities. 9
From the perspective of vehicular communications, dedicated short-range communication (DSRC) service has been developed as a set of protocols and standards used for VANETs operating at a frequency range from 5.850 to 5.925 GHz dedicated for road safety and traffic efficiency. To provide DSRC service, both American and European standards have adopted wireless access in vehicular environments (WAVE) or IEEE 802.11p as PHY and MAC layers via carrier sense multiple access with collision avoidance (CSMA/CA).10–12 In WAVE, each vehicle periodically switches on control channel (CCH) to disseminate control and safety-related messages with high priority toward all surrounding vehicles through single-hop broadcasting and then tune into one of available service channels (SCHs) to exchange all the other low priority service messages. In this way, the joint use of CCH for safety-related messages and SCHs for service messages will necessitate the multichannel transmission in vehicular communications. As a significant IoV entity, intelligent vehicle terminal (IVT) is an intelligent embedded vehicle-carried OBU system installed on vehicles in IoV scenario. The vehicles equipped with IVT system collect vehicular status information, sense road situation and environment, and also acquire real-time location information of vehicles by adopting the emerging wireless technologies such as IoT, DSRC, long-term evolution/fourth generation (LTE/4G) mobile communications, and GPS/BDS navigation and positioning system. Moreover, IVT system can be further developed for meeting the drivers’ real-life needs of eating, living, traveling, shopping, and entertainment by means of interaction and display functions.
Recall that the purpose of real-world applications toward IVT system or even IoV is to provide drivers and passengers with Internet-based services along with some new types of services on SCHs dedicated to highly mobile environment via DSRC technology. A large number of applications as described above require multicast communications in IoV scenario where multicasting data packets of service messages will be delivered or addressed to a group of destination vehicle nodes simultaneously (i.e. one-to-many or many-to-many distributions).13–15 Apart from traditional multicast applications, IVT system together with IoV can also allow emerging new applications in multicast data delivery (MDD) involving fleet management and point of interest distribution. 13 It is discovered that the use of MDD on SCHs in IVT system can effectively organize network resources, save bandwidth consumption, reduce network congestion, and ensure load balance of data traffic. Most importantly, IoV and VANETs should also offer a large number of safety applications with high priority, including autonomous lane change maneuver, forward collision warning, traffic signal violation, emergency brake lights, and so on.16–18 By the aid of IVT system and RSUs in IoV scenario, safety applications use beacon messages that are based on periodic message exchanges of single-hop broadcast packets (also known as cooperative awareness messages) on CCH. 11 The periodical exchange of beacon messages on CCH among IVT system and RSUs will make vehicles aware of their surroundings and will also be exploited by higher layer protocols and applications. Accordingly, this operation will help to significantly improve road safety, traffic efficiency, and even driving comfort. Unfortunately, high transmission power and rapid mobility of each vehicle node in IoV scenario cause regions of node density to form quickly. 19 In such situations, similar to terrestrial wireline Internet or most other traditional wireless networks, network congestion in IoV scenario will also occur when aggregated data load exceeds available capacity of vehicle node due to buffer overflow caused by accumulated periodic beacon messages on CCH. It, therefore, results in performance degradation for safety applications in IoV scenario including beacon message losses, aggressive retransmissions, queuing delay, and blocking of new sessions, which will further decrease quality of service (QoS) and reliability of safety applications. Indubitably, congestion control technique should be conducted on CCH to reduce beacon message drops, to enhance network fairness, to balance resource load, and to avoid excessive congestion. From above discussions, we can find that the multichannel transmission of multicasting service messages on SCHs and periodic exchanges of beacon messages on CCH for IoV scenario becomes highly valuable. This motivates us to reinvestigate how to realize the multicasting and congestion control (MAC2) for IoV scenario from the IVT system perspective.
Related works
Design and development of IVT system have attracted much attention around research community, although the mainstream research efforts are aimed at the protocols and algorithms within the layered architecture of IoV.1,7,20 In the literature, IVT system in IoV environment was mainly devised according to different application scenarios, such as intelligent transportation, 21 logistics and cargo transportation,22,23 forestry monorail car, 24 and engineering equipment. 25 Xu and Li 21 presented the hardware design and software flowchart of an embedded vehicle terminal, with the capability to achieve high reliability, low power consumption, stable performance, and easy extensibility. Li et al.22,23 proposed two vehicle terminal systems which can realize collaborative awareness, continuous monitoring and precise localization of vehicles for logistics and cargo transportation by employing context-aware computing. Yang et al. 24 designed an embedded wireless forestry monorail car control system with the object to achieve long-distance’s real-time monitoring and control the monorail car. Tu et al. 25 proposed a vehicle intelligent terminal system for engineering equipment by taking into account condition monitoring, fault diagnosis, time-based maintenance intelligent management, and long-distance operation management synthetically. A main drawback of those developed IVT system21–25 is that they did not consider how to deal with multicasting service messages on SCHs coupled with periodic exchanges of beacon messages on CCH for IoV scenario. In other words, from a practical application perspective, both MAC2 functions and modules were not incorporated into the IVT architecture.
From a theoretical study perspective, several studies on MDD or multicast routing for IoV scenario and VANETs were undertaken recently, including Internet-based multicasting,13,14 trajectory-based multicast, 26 spatiotemporal multicast, 27 QoS-constrained multicast routing, 28 and cognitive multicast routing. 29 Jemaa et al.13,14 proposed an extended membership management and mobility-aware tree-based multicast message dissemination protocol, to enable Internet-based multicast services on top of VANETs. Jeong et al. 26 devised a trajectory-based multi-anycast forwarding scheme for achieving efficient MDD in vehicular networks. Moreover, a multicast tree per packet was well constructed to minimize overall multicast delivery cost or delivery delay. Chen et al. 27 presented a spatiotemporal multicast protocol to support the spatiotemporal coordination in VANETs. In the context of QoS-constrained multicast routing, Zhang et al. 28 modeled multicast routing as the continuous optimization problem to maximize network lifetime and minimize communication cost. A micro–artificial bee colony algorithm was further proposed to deal with this continuous optimization problem. Kim and Gerla 29 presented a cognitive multicast protocol by applying the cognitive ability of vehicle nodes for VANETs. In addition, the effect of adjacent channel interference and narrowband interference was mitigated by exploiting orthogonal frequency-division multiplexing (OFDM) technique. To the best of our knowledge, there also has been some theoretical research efforts in congestion control strategies for VANETs or vehicular communications, namely, QoS and driving context awareness, 19 cross-layer model, 12 beaconing rate control with different transmit power, 30 statistical approach to transmit power control, 31 environment- and context-aware approach, 32 and so on. Zhang and Valaee 19 formulated the transmission probability of vehicle node under a slotted p-persistent vehicular broadcast MAC protocol as a classical network utility maximization (NUM) problem to reach a fair distribution of available wireless resources. Jabbarpour et al. 12 presented a cross-layer congestion control model by jointly considering prioritized event-driven messages and channel load threshold assignment in VANETs. Egea-Lopez and Pavon-Marino 30 transformed the beaconing congestion control problem for vehicular networks as a NUM rate allocation problem, to maximize the number of beacons delivered at each transmit power. A statistical approach was also introduced by Egea-Lopez et al. 31 aiming to conduct transmit power control for beaconing congestion control, complying with the given maximum beacon load. Aygun et al. 32 proposed an environment- and context-aware decentralized congestion control algorithm that combines power and rate control to improve cooperative awareness by adapting to propagation environments for vehicular communications. Although that the theoretical studies has made impressive progress in multicasting13,14,26–29 and congestion control12,19,30–32 for IoV scenario and VANETs, our work differs from them based on two points. First, their performance evaluations were to optimize one or several objectives through extensive computer simulations under the given parameter settings. However, our work is to conduct system design and hardware implementation of MAC2 modules with multichannel transmission, and use these modules to attain experimental data via extensive static tests. Second, those authors mainly focused on investigating the strategies and protocols under the limitation of IoV scenario and VANETs. We study this problem from the IVT architecture perspective and focus on the interactions between the IVT architecture and MAC2 modules.
Contributions and organization
In this article, our goal is to figure out how to deal with multicasting service messages on SCHs coupled with periodic exchanges of beacon messages on CCH for IoV scenario. To achieve this goal, we revisit the IVT architecture and particularly design the wireless communication board (WCB) by incorporating MAC2 modules. Under the framework of the IVT architecture, our work mainly concentrates on the system design and hardware implementation of MAC2 for IoV scenario owing to its significant impact on network performance. It once again goes without saying that the multichannel transmission of beacon messages on CCH along with service messages on SCHs are fully achieved by enabling MAC2 together in IVT system. To summarize, the contributions of our work are as follows:
We propose an MDD scheme with random-delay lowest-cost (RDLC) constraint to transfer service messages on SCHs. In this scheme, a multicast tree with the minimum tree cost is constructed using the delay-based Dijkstra algorithm to compute the multicast tree with shortest paths. Further, a random-delay control strategy is formulated to dynamically regulate the transmit time of Reply packet for destination vehicle node, aiming to reduce the collision probability of multicast data packet transfers.
A priority-aware congestion control (PARCEL) scheme is proposed by giving more insights into differentiated priorities of beacon messages for safety applications on CCH when the congestion occurs at the possible bottleneck vehicle node. We define a time and distance coupling function to describe the priority of beacon message with a certain type. This scheme relies on this coupling function as well as perfect interaction between congestion control policy and two control messages. In addition, we use a receiver-level value to characterize the selection metric of optimal neighbor vehicle node as the receiver of beacon messages.
We employ the proposed MDD scheme into the design of the MDD module and build up the RanLow (Random-delay Lowest-cost) module and its prototype system in WCB board of the IVT architecture. In addition, the PARCEL module and its prototype system are also constructed in WCB board. We evaluate the performance of the devised RanLow module and PARCEL module through extensive static tests.
The remainder of this article is organized as follows. The IVT architecture is introduced in section “IVT architecture.” Section “System model” describes the system model. In section “Enabling MAC2 in IoV scenario,” we propose the enabling schemes for MAC2. Section “System design and experimental results” introduces the system design of RanLow module and the PARCEL module for IVT system and further demonstrates the experimental results. Finally, section “Conclusion and future work” concludes this article and discusses the future work.
IVT architecture
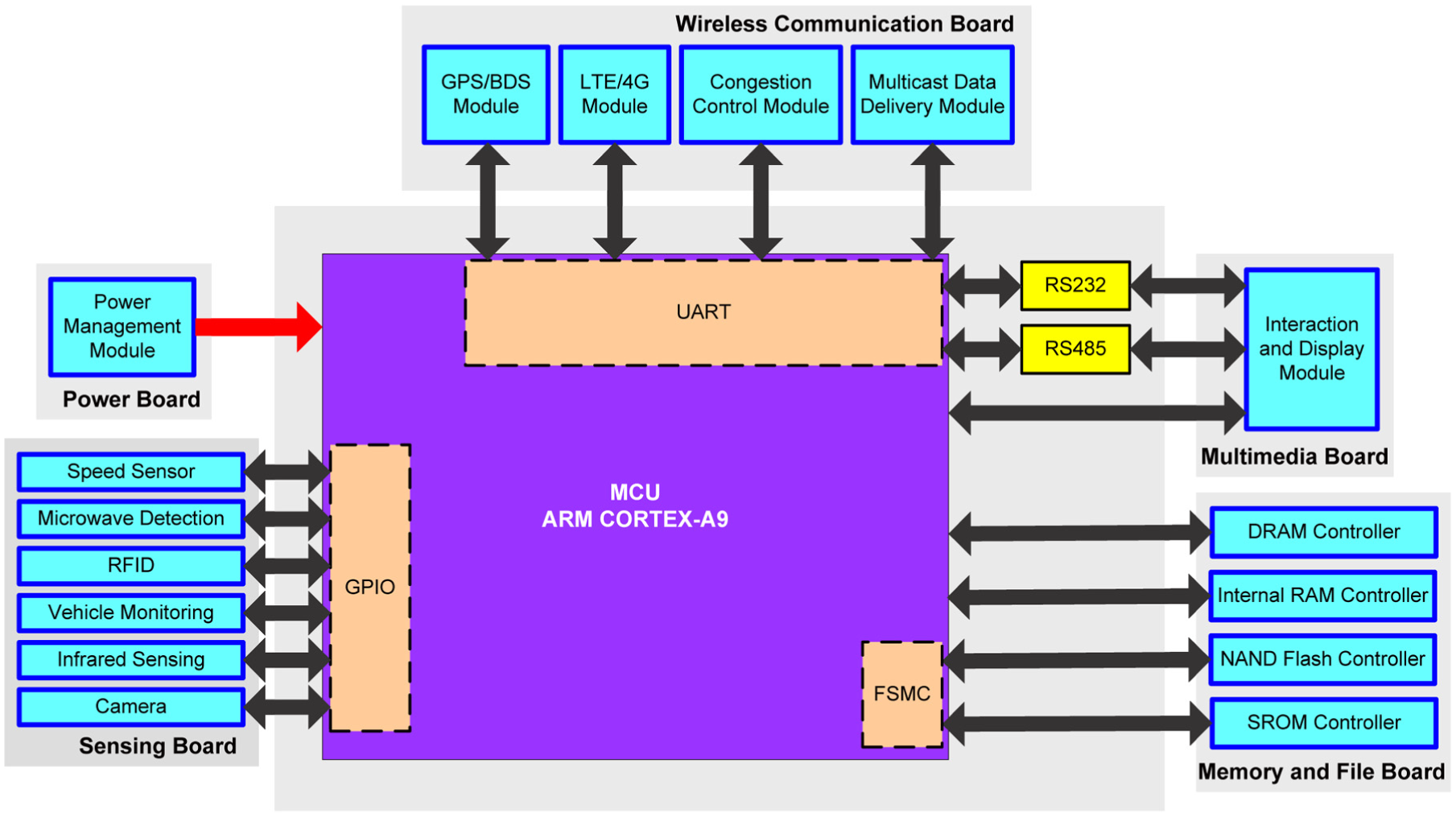
As an intelligent vehicle-carried OBU system, IVT system is installed on vehicles which can be used for different transport services and personal real-life needs of drivers and passengers. Beyond this, it can be also devised to provide the realistic applications through multichannel transmission including: (1) MDD applications on SCHs with the purpose of achieving better network performance and obtaining particular demands with service messages; (2) safety applications via periodic beacon message exchanges on CCH, aiming to improve road safety, traffic efficiency, and even driving comfort. In addition to traditional function modules as depicted in the literature,21–25 IVT system could also have an MDD module and a congestion control module from an architecture perspective. Based on this motivation, we intend to build the IVT architecture by taking into account more realistic multicasting services and congestion control mechanism for specific applications via multichannel transmission. Specifically, the IVT architecture as shown in Figure 1 is devised on the basis of the ARM Cortex-A9 MPCore as a microcontroller unit (MCU) that is one multicore processor providing up to four cache-coherent cores, supporting the following core function boards:
WCB. To realize the wireless communication functions encompassing navigation/positioning services, mobile communications/wireless access, MDD services, congestion control with safety applications, and so on, the WCB consists of a GPS/BDS module, an LTE/4G module, an MDD module, and a congestion control module, which can connect to the MCU by adopting the universal asynchronous receiver/transmitter (UART) port.
Sensing Board (SB). The SB is responsible for detecting, collecting, and processing information by means of several in-vehicle sensors that connects IVT system. The information will be transferred through the general-purpose input/output (GPIO) pins at run time. In the SB, the in-vehicle sensors include speed sensor, microwave detection, radio-frequency identification (RFID), vehicle monitoring, infrared sensing, and camera, in order to acquire various kinds of sensing information about intelligent vehicle environment awareness.
Multimedia Board (MB). The interaction/display services offered by peripheral devices (i.e. human interface devices) through the MB should be connected to the MCU via the UART port. Particularly, a large number of peripheral devices communicate with the MCU via serial point-to-point connections. Connecting these peripheral devices to the MCU requires the use of interfaces that transfer serial signals to bus protocols and vice versa. The interaction and display module in the MB allows for the use of either an RS232 or an RS485 serial interface, which helps to simplify IVT system configuration.
Memory and File Board (MFB). The MFB is devised to provide memory/file services through controllers comprising dynamic random-access memory (DRAM), internal random-access memory (RAM), NAND flash, Serial Read-Only Memory (SROM), and so on, which will be connected to the MCU directly or with the help of the flexible static memory controller (FSMC). Technically, the FSMC supports external memory via NAND Flash Controller and SROM controller.
Power Board (PB). The PB is in charge of power supply for each function boards and the MCU of IVT system.
Intelligent vehicle terminal architecture.
System model
We consider a bidirectional network topology of IoV scenario as depicted in Figure 2, wherein a number of RSUs are uniformly distributed along the side of straight road segment with length


Considered bidirectional network topology of IoV scenario.
Let

where

We model the relay vehicle nodes as
Enabling MAC2 in IoV scenario
MDD scheme with RDLC constraint
The main idea for the MDD scheme with RDLC constraint is to construct a multicast tree with the minimum tree cost. Under the constraint of the multicast tree, we attempt to perform the real-time multicast data transmission of service messages on SCHs using the random-delay control strategy. Note that the real-time multicast data transmission in this section refers to the transmission of service messages on SCHs according to multicasting policy. For convenience of presentation, Table 1 lists some important notations used in our MDD scheme with RDLC constraint.
Important notations.

Definition 1 (link delay)
The delay of link
Definition 2 (link cost)
The cost of link
Definition 3 (path cost)
The path cost

where
Definition 4 (path delay)
The path delay

Definition 5 (tree delay)
The multicast tree
Definition 6 (tree delay)
The tree delay
Our problem is that given an ordinary graph


where
If link
Multicast tree construction algorithm using MDD scheme with RDLC constraint.

It should be noticed that a multicast tree with the minimum tree cost can be constructed via the process of our MDD scheme with RDLC constraint whose pseudo-code is given in Algorithm 1. The key point to establish the multicast tree in light of the proposed MDD scheme with RDLC constraint is illustrated with a flowchart shown in Figure 3. When this multicast tree is established, the destination vehicle nodes within the multicast group will receive the Join packets that are sent by a source vehicle node. To indicate that the multicast tree has been built up, a destination vehicle node on receiving the first Join packet will send a Reply packet on a route obtained by reversing the route appended to this multicast tree. Note that this operation by the destination vehicle node is reasonable due to the assumption that the bidirectional transmission structure has been taken into account in each link as stated before. In particular, the Reply packets that are sent by multiple destination vehicle nodes simultaneously will lead to the collision of multicast data packet transfers, which may thereby reduce the transmission efficiency. Hence, we employ the random-delay control strategy to dynamically regulate the transmit time of Reply packet for each destination vehicle node, aiming to lower the collision probability of multicast data packet transfers. Let

where

Flowchart of the proposed MDD scheme with RDLC constraint.
PARCEL scheme
As aforementioned, safety applications with high priority (e.g. autonomous lane change maneuver, forward collision warning, traffic signal violation, and emergency brake lights) primarily exploit periodic exchanges of beacon messages on CCH. Recall the set

where

Substituting

Noticing that priority
Definition 7 (transition function)
Given a transition function

where
According to equation (12), the transition function

Transition function
Thus, we can take advantage of the transition function

where
Assuming that the saturation value of the buffer of bottleneck vehicle node

By comparing the current amount
Rule 1. Compute priority
Rule 2. Based on priority
According to Rule 2, in order to obtain the proper neighbor vehicle node as the receiver of beacon messages with the highest priority

(a) FREQ and (b) FREP message formats.
When neighbor vehicle node

where

Flowchart of the FREP message process.
Based on the received FREP messages from multiple neighbor vehicle nodes, the objective of bottleneck vehicle node

According to the selection metric for optimal neighbor vehicle node

Flowchart of the proposed priority-aware congestion control scheme.
System design and experimental results
System design of RanLow module
We next proceed to employ our scheme as discussed above to devise the RanLow module, an MDD module with RDLC constraint in WCB board of IVT system. Based on the IVT architecture, the overall hardware architecture of the RanLow module as depicted in Figure 8(a) is based on the STC89C52RC Chip Microcomputer of 8-bit single-chip microcontroller. In particular, this 8-bit microcontroller connects four external circuits consisting of RF & Wireless Circuit, Serial Port Circuit, Power Circuit, and External RAM Circuit. On the basis of the overall hardware architecture, we devise a hardware circuit of the RanLow module as illustrated in Figure 9. It is worth noting that the STC89C52RC Chip Microcomputer can acquire the 5 V DC-stabilized voltage source whose power is supplied by the Power Circuit. In the External RAM Circuit, two 32 KB × 8-bit high-performance complementary metal-oxide-semiconductor (CMOS) static RAM chips are utilized to supply 64 KB dynamic data memory. Moreover, the Serial Port Circuit uses CH340 serial chip that supplies common MODEM liaison signal, used to enlarge asynchronous serial interface of computer or upgrade the common serial device to USB bus directly. Also, in the RF & Wireless Circuit, the Nordic nRF905 is chosen as a highly integrated, low power, multiband RF transceiver IC for 433/868/915 MHz ISM (Industrial, Scientific, and Medical) band. In summary, the detailed hardware settings of the RanLow module are provided in Table 2. Correspondingly, we build up the prototype system of the RanLow module as shown in Figure 8(b) by bearing in mind the overall hardware architecture of the RanLow module and four external circuits.

Hardware design of the RanLow module: (a) overall hardware architecture and (b) prototype system of RanLow module.

Hardware circuit development of the RanLow module.
Detailed hardware settings of the RanLow module.

RAM: random-access memory; RF: radio-frequency; ISM: industrial, scientific, and medical; CMOS: complementary metal-oxide-semiconductor.
Aiming at realizing the MDD scheme with RDLC constraint under the RanLow module, we conduct the software design and programming operations to keep the STC89C52RC Chip Microcomputer function properly. In general, the RanLow module will be activated by the source vehicle node when the set of destination vehicle nodes contains more than two vehicle nodes, that is,

Programming flowchart diagram of the RanLow module.
System design of PARCEL module
We next turn to employ the proposed PARCEL scheme as stated above to build the PARCEL module, a congestion control module with safety applications in WCB board of IVT system. According to the IVT architecture, the overall hardware architecture of the PARCEL module shown as in Figure 11(a) is based on the C8051F340 MCU of 8-bit microcontroller, which can connect four external circuits including the Serial Port Circuit, the PL2303 USB to Serial Bridge Controller, the External RAM Circuit, the Power Circuit, and the Reset Circuit. With the help of the overall hardware architecture, we devise a hardware circuit of the PARCEL module as illustrated in Figure 12. It is worth mentioning that the 8-bit C8051F340 MCU includes a powerful 8051 core with 50 MHz performance along with 64 KB Flash and 4.25 KB RAM and can acquire 3.6–5.25 V voltage sources whose power is supplied by Power Circuit. In the External RAM Circuit, three 32 KB × 8-bit high-performance CMOS static RAM chips are used to supply 96 KB dynamic data memory via CY62256 Cypress Semiconductor. Easy memory expansion is provided by an active LOW chip enable and active LOW output enable and Tri-state drivers. Moreover, the Serial Port Circuit uses MAX3223 chip that offers the electrical interface between an asynchronous communication controller and the serial-port connector. Also, the PL2303 USB to Serial Bridge Controller provides a convenient solution for connecting an RS232 full-duplex asynchronous serial device to any USB capable host. By taking advantage of USB bulk transfer mode, large data buffers, and automatic flow control, PL2303 is capable of achieving higher throughput compared to traditional UART ports. To this end, we build the prototype system of the PARCEL module as shown in Figure 11(b) by bearing in mind the overall hardware architecture of the PARCEL module and five external circuits.

Hardware design of the PARCEL module: (a) overall hardware architecture and (b) prototype system.
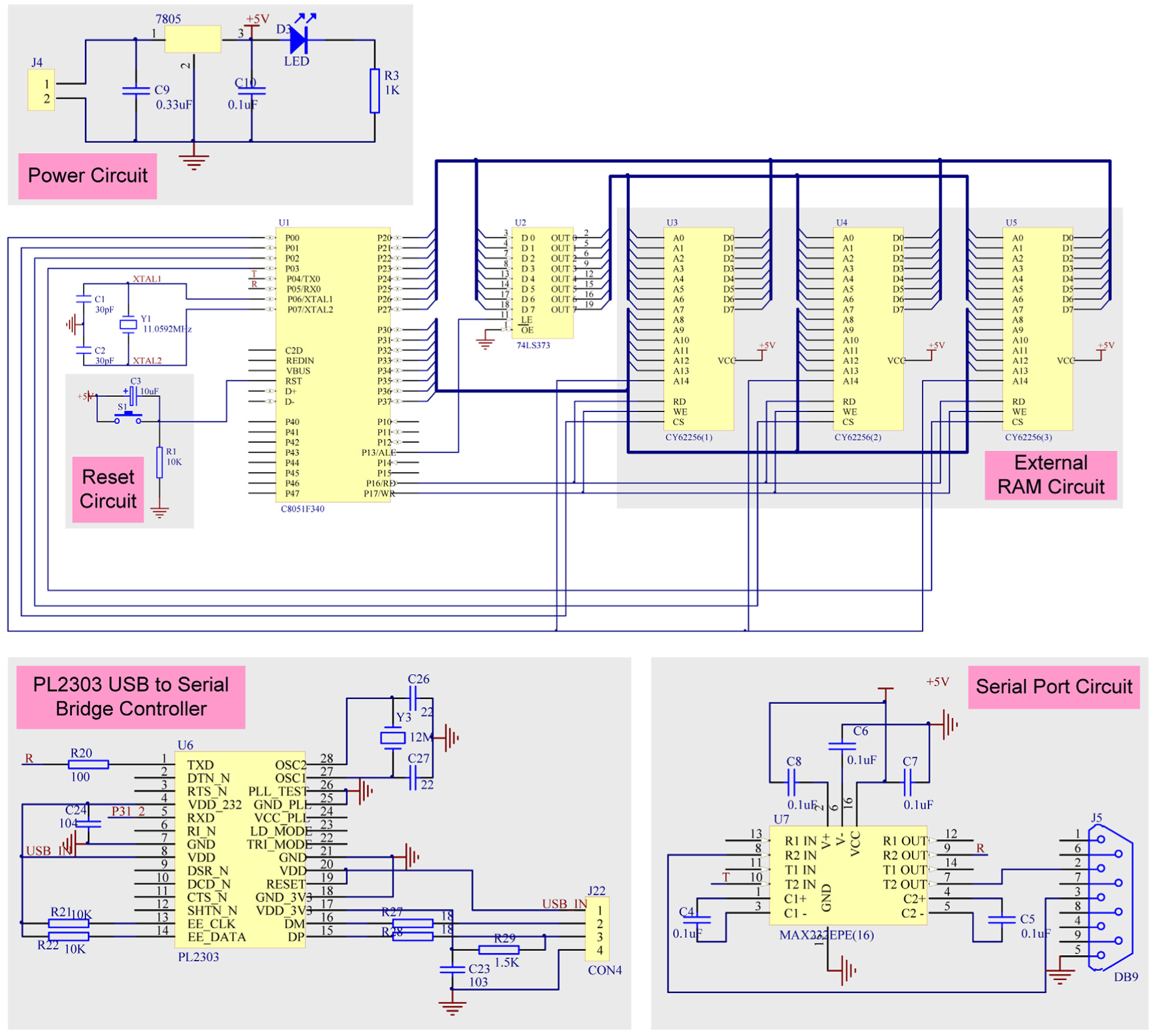
Hardware circuit development of the PARCEL module.
By comparing the current amount
Experimental results of RanLow module
In the following, we first present the experimental results to demonstrate the performance of the proposed RanLow module. Note that our experiments are carried out indoors through extensive static tests using the devised RanLow module. We consider a scenario of the IoVs, wherein
Experimental parameters for the RanLow module and the PARCEL module.

PARCEL: priority-aware congestion control.
First, we validate the RanLow module under the experiment scenario as shown in Figure 13(a), which contains

Experiment scenario setting for the RanLow module: (a) experiment scenario of the RanLow module and (b) experiment scenario of the CDKS and KPP strategies.
Average delay by the RanLow module.

Average delay by the CDKS strategy.

Average delay by the KPP strategy.

Due to the limited number of destination vehicle nodes in our experiments, we also provide simulation results to evaluate the performance of the RanLow module under MDD scheme with RDLC constraint by comparing with the CDKS and KPP strategies. Based on the same setting of experiment parameters as shown in Table 3, we intend to randomly deploy various number of destination vehicle nodes to obtain the average delay of MDD that all destination vehicle nodes receive the multicast data packets. Figure 14 exhibits the average delay comparison among RanLow module, CDKS strategy, and KPP strategy according to different number of destination vehicle nodes. From the results, we can see that an increased number of destination vehicle nodes from 5 to 30 will increase the average delay of MDD. This is a direct consequence of number of destination vehicle nodes on MDD. Apparently, we can also find that the average delay the RanLow module is obviously lower than those of the CDKS and KPP strategies. The results are in line with the experimental results given in Tables 4–6. The explanation is twofold. First, the collision probability of multicasting is reduced by leveraging the random-delay control strategy to regulate the transmit time of the Reply packet. Second, the CDKS and KPP strategies fail to tackle the problem of the collision of multicasting.

Average delay comparison among RanLow module under the MDD scheme with RDLC constraint, CDKS strategy, and KPP strategy.
Experimental results of PARCEL module
In this section, we then present the experimental results to demonstrate the performance of the proposed PARCEL module. Similar to the experiments for the RanLow module, the PARCEL module is also verified indoors by means of extensive static tests. The experiments mainly involve the following steps. First, when the congestion occurs under the condition of
First, we validate the PARCEL module under the experiment scenario as shown in Figure 14, which contains

Experiment scenario of the PARCEL module.

Average time interval comparison.
Conclusion and future work
In this article, we studied how to deal with multicasting service messages on SCHs along with periodic exchanges of beacon messages on CCH for IoV scenario. First of all, we revisited the IVT architecture, and particularly design the WCB board by incorporating MAC2 modules. Apart from this, we proposed the MDD scheme with RDLC constraint, to transfer service messages on SCHs. In order to deal with network congestion, we presented the PARCEL scheme by taking into account differentiated priorities of beacon messages for safety applications on CCH. Then we conducted the system design and hardware implementation using the proposed schemes to devise the RanLow module and the PARCEL module in WCB board of the IVT architecture. In the evaluation, we constructed the hardware experimental environment to evaluate the performance of the RanLow module and the PARCEL module via extensive static tests. The experimental results were presented to demonstrate the effectiveness of our devised RanLow module and PARCEL module.
What we have discussed in this article is the portion of foundation for the IVT system in IoV scenario. Possible direction for future work within this research is to devise the prototype system of the mobile intelligent vehicle using the RanLow module and the PARCEL module in WCB board of IVT system. Based on the prototype system, we plan to build the actual settings for IoV to conduct the mobile tests. As another future work, we will try to investigate MAC2 in the practical scenarios of future autonomous driving 7 or clean-energy intelligent vehicles, 8 to accommodate for the future IoV evolution. Moreover, it will be interesting and important to explore how to devise vehicle control-oriented applications in the IVT architecture, for example, autonomous lane change maneuver, forward collision warning, and traffic signal violation,16–18 to enable safety, mobility, and environmental sustainability.
Footnotes
Handling Editor: Liping Jiang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China under grants 61402147 and 61501406; the Research Program for Top-notch Young Talents in Higher Education Institutions of Hebei Province, China, under grant BJ2017037; the Research and Development Program for Science and Technology of Handan, China, under grant 1621203037, the Natural Science Foundation of Hebei Province of China under Grants F2017402068 and F2018402198.