
Abstract
Structural parameters are the most important factors reflecting structural performance and conditions. As a result, their identification becomes the most essential aspect of the structural assessment and damage identification for the structural health monitoring. In this article, a structural parameter identification method based on Monte Carlo method and likelihood estimate is proposed. With which, parameters such as stiffness and damping are identified and studied. Identification effects subjected to three different conditions with no noise, with Gaussian noise, and with non-Gaussian noise are studied and compared. Considering the existence of damage, damage identification is also realized by the identification of the structural parameters. Both simulations and experiments are conducted to verify the proposed method. Results show that structural parameters, as well as the damages, can be well identified. Moreover, the proposed method is much robust to the noises. The proposed method may be prospective for the application of real structural health monitoring.
Keywords
Introduction
From the beginning of getting into use, civil engineering structures face the effect of load, environmental erosion, material aging, accidental bumping, and many other factors, which will ultimately lead to structural damage and destruction.1–3 Based on this consideration, structure health monitoring (SHM) technologies have been developed in recent decades to estimate the actual values of structural parameters changed due to deterioration or damage of structures in use.4,5 As the most important part of structural health monitoring, damage identification includes four aspects, namely detecting the existence, the location, the severity of structural damage, and service life of the structures.6–9 Most damage identification judges the existence and degree of damage by comparing structural parameters’ change rules or differences before and after the damage occurs.10,11 Structural parameter identification plays an important role in the damage identification of structures.
For parameters identification, it is common to define the vibratory characteristics of a structure with the parameter of mass, damping, and stiffness. 12 Many researchers have made a lot of efforts in the identification of structural parameters with different methods such as Bayesian network, Kalman filter, Likelihood estimation.13–18 Udwadia et al. 19 put forward that the stiffness and damping of a building story can be uniquely identified with the conditions of the recorded absolute accelerations. Takewaki and Nakamura 20 taken advantage of the limited earthquake records and the knowledge of the floor masses to identify the stiffness and damping of building structures. D’Amore et al. 21 investigated the capability of input–output system identification methods, using Kalman filter to identify dynamic characteristics of typical office building structures subjected to strong ground motion. There is no doubt, identifying the physical parameters of structures is the most direct and efficient way for the health monitoring of structures.
In this study, a structural parameter identification method based on Monte Carlo Method and likelihood estimate is proposed. Identification effect and its robustness to different types and levels of noises will be studied in detail. Structural damage identification will also be studied with the proposed method.
Basic principal of parameter identification
Monte Carlo method, also called statistical experimental method, is based on the probability definition that the probability of an event can be estimated from the frequency of occurrence of the event in a large number of trials. In order to identify the structural parameters such as stiffness k and damping c, we could randomly pick n groups of stiffness ki and damping ci in their distribution ranges, then compare the calculated responses with the observed responses. The structure model represented by certain parameters will be regarded as the identified one if the calculated responses under such parameters can match the best with the observed responses which are from the actual target structure. At the meantime, such parameters are regarded as the identified ones of the target structure. This structural parameter identification method is based on Monte Carlo method and the accurate probability will be larger when n tends to increase.
To compare the observed response and calculated response, we here apply the concept of maximum likelihood value. Through the likelihood function in statistics shown in equations (1)–(3), the likelihood value of each sample can be achieved. The sample with the maximum likelihood can be identified as well and we assume this sample to be the predicted sample. This also means that the difference between observed and calculated response reaches the minimum when the likelihood value reaches the maximum. Combining Monte Carlo method and maximum likelihood value, stiffness ki and damping ci nearest to the actual value of stiffness k0 and the actual value of damping c0, therefore, can be identified as the true values.



Based on such consideration, we proposed to realize the parameter identification with the Monte Carlo method and likelihood estimates. For an unknown target structure, proper parameters such as stiffness and damping will be selected for identification. Then proper sampling range is also needed to be determined. After sampling, dynamic responses under the same excitation of the target structure will be calculated under each sample case. Likelihood will be calculated between the calculated responses and the observed ones from the target structure. Finally, maximum likelihood will be selected and corresponding parameters (samples) become the identified parameters. The flowchart of the mechanism is shown in Figure 1.
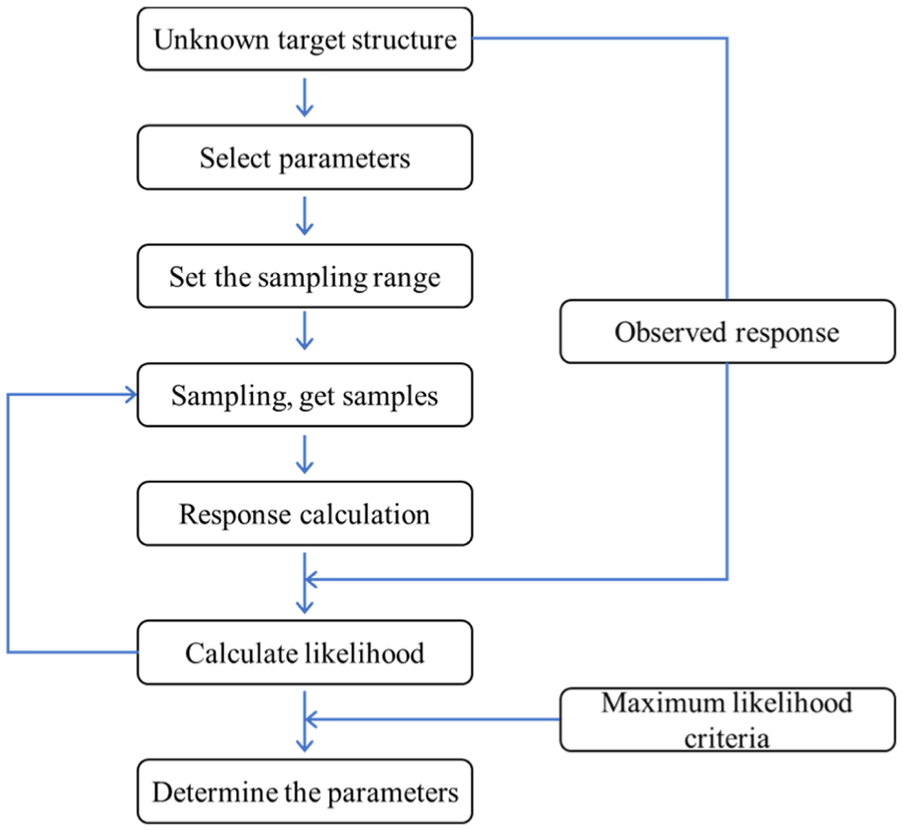
Flowchart of the parameter identification approach.
Numerical simulation of structural parameter identification
Single- and multiple-degree-of-freedom structure model
As the most basic and simplest system, single-degree-of-freedom (SDOF) linear system is the basis of multi-degree system, continuous system, and nonlinear system in vibration analysis. Many practical problems can be simplified to SDOF linear system to deal with. A SDOF linear structure is shown in Figure 2.

Lumped-mass single-degree-of-freedom structure under translational motion: (a) structure is subjected to the earthquake motion and has the inertia force at the mass point and (b) structure vibrates and has displacement at mass point.
The SDOF structure in Figure 2 is adopted with some basic assumptions that the foundation is rigid and the structure is elastic, so the horizontal motion of the whole structure is consistent.
The initial parameters of the structure in Figure 2 are assumed as mass m0 = 400 kg, stiffness k0 =2500 N/m, damping ratio
At the beginning, the displacement and velocity of the structure are both zero. Using

Time-history curve of Kobe earthquake’s horizontal acceleration.
However, for many practical structures, it is not enough to be simplified in SDOF system for analysis. They are usually described in multi-degree-of-freedom (MDOF) structures. In this paper, multi-degree structures are considered as the following model in Figure 4.
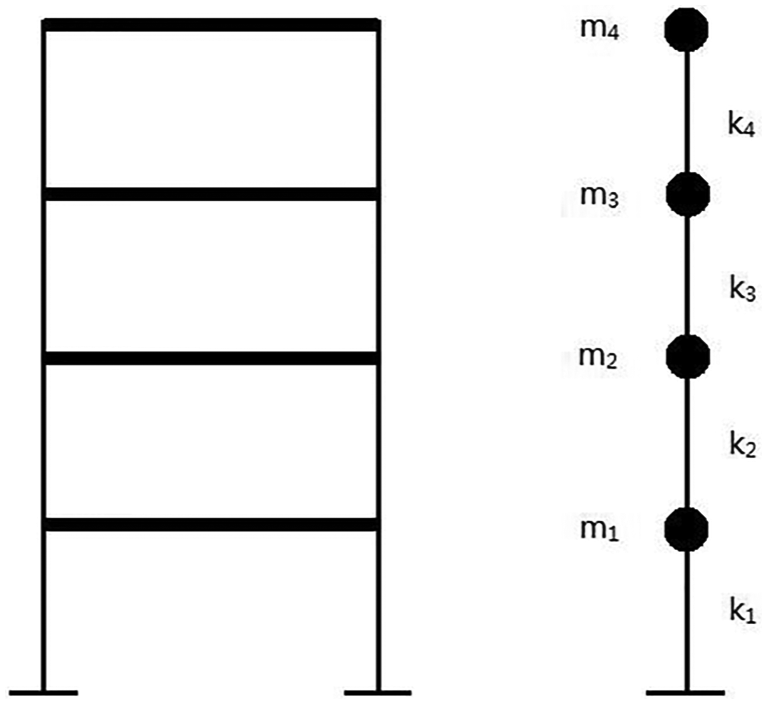
Multiple-degree-of-freedom structure model.
Structural parameter identification without noise
As an example, n groups of stiffness ki and damping ci are randomly taken according to equations (4) and (5), where randi is a function to produce a uniform distribution of pseudo random integers. When n = 1000, structural parameters’ (stiffness ki and damping ci) distribution is shown in Figure 5



Structural parameters’ distribution of initial predicted sample points.
During the earthquake, horizontal ground motion will cause the vibration of the upper structure, we can get n groups of time–history curve of displacement response

Based on the actual parameters k0 and c0, time–history curves of displacement response
The likelihood value of 1000 samples can be calculated separately on the basis of displacement, velocity, and acceleration response. The calculated likelihood values based on the acceleration response are shown in Figure 6.
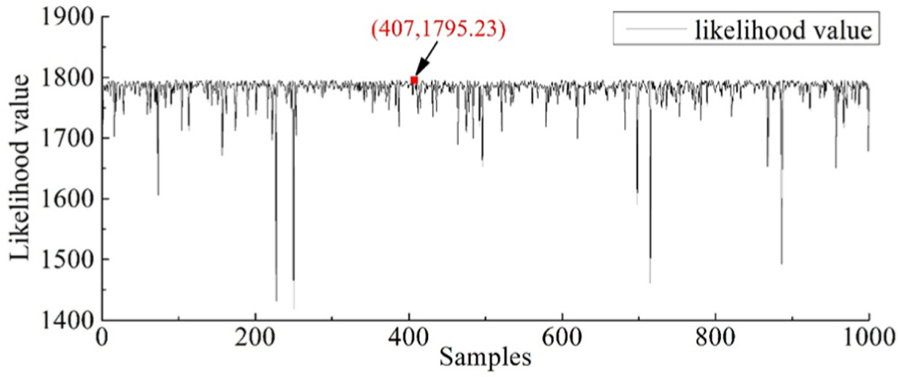
Likelihood value of samples.
In Figure 6, the marked point is supposed to be the point with the maximum likelihood value. The horizontal and vertical ordinates respectively indicate the sample number and the maximum likelihood value.
The results of noiseless SDOF structural parameters (stiffness k and damping c) based on maximum likelihood estimation are shown in Table 1. According to the results, dynamic time-history curves of the identified parameters (stiffness ks and damping cs) and true values (stiffness k0 and damping c0) can be drawn.
Parameter identification results of the noiseless SDOF structure (n = 1000).

SDOF: single-degree-of-freedom.
More samples are chosen. For example, n = 2000, final results of noiseless single-degree parameters (stiffness k and damping c) based on maximum likelihood estimation are shown in Table 2.
Parameter identification results of the noiseless SDOF structure (n = 2000).
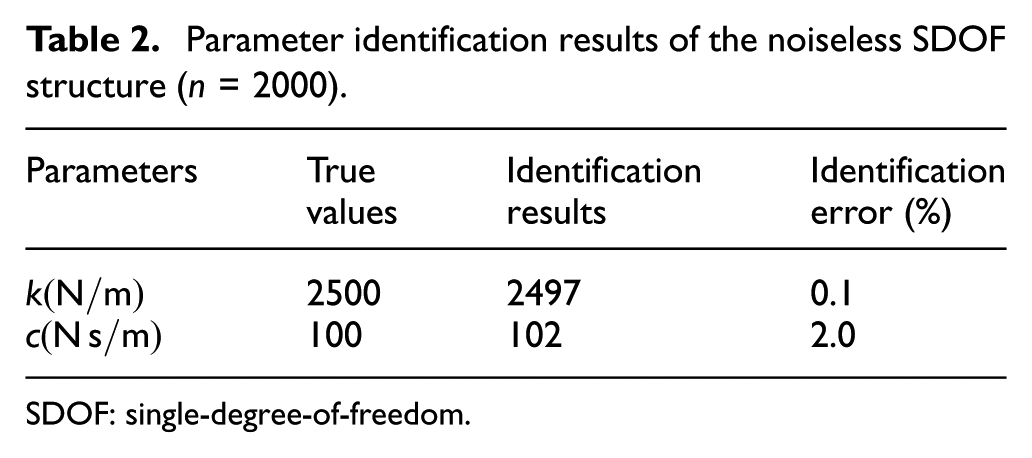
SDOF: single-degree-of-freedom.
Comparing Tables 1 and 2, it is found that the more samples we generate, the higher accuracy this identification method would have but the longer time it would take.
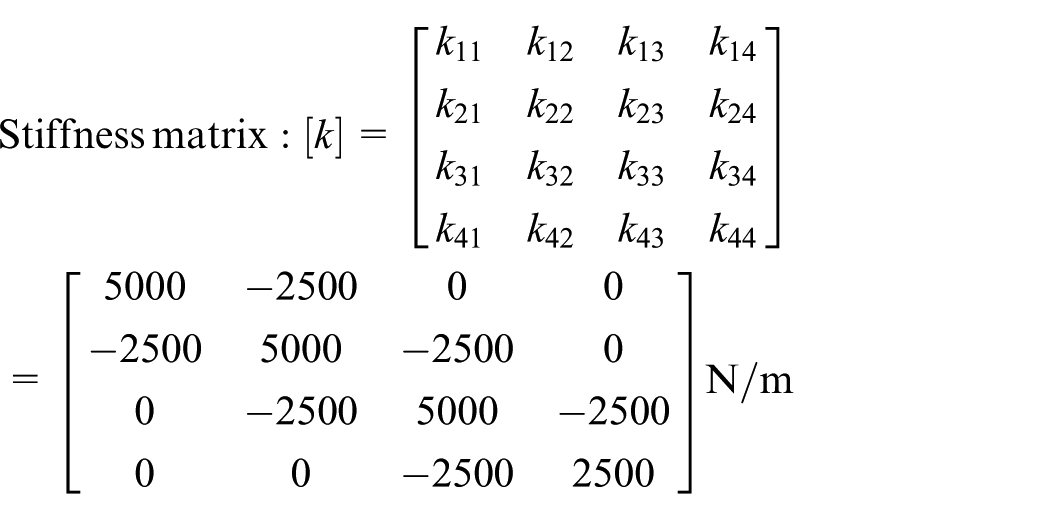
For multi-degree structures, the real parameters are assumed as follows


n = 48 samples are chosen and the final results are shown in Table 3.
Parameter identification results of the noiseless MDOF structure (n = 48).

MDOF: multi-degree-of-freedom.
For the multi-degree structures, the identification error tends to become larger than that of the single-degree structures. This may due to the complexity of the multi-degree structures.
Structural parameter identification with Gaussian noise
Gaussian noise is one kind of common noises with the probability density function corresponding to Gaussian distribution. Noise with different levels was added to the true values as the observed signal to study their effect. The observed acceleration signals with 30% Gaussian noise are illustrated in Figure 7.

Observed acceleration signals with 30% Gaussian noise.
The structural parameters of stiffness k and damping c under different levels of Gaussian noise are identified and compared. The comparison results are illustrated in Figures 8 and 9.
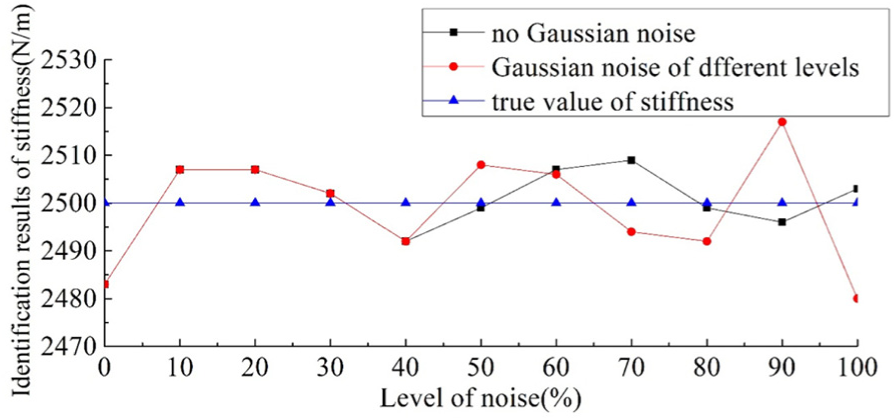
Identification results of stiffness under Gaussian noise of different levels.

Identification results of damping under Gaussian noise of different levels.
From Figures 8 and 9, there is no obvious rule for the identification of stiffness and damping. This is mainly because that all the samples are generated randomly while the identification results are influenced by samples. However, on the whole, it is shown that this method is not so sensitive to the Gaussian noise, even when the noise level becomes fairly large, the parameters still can be identified without large error. For multi-degree structures, we choose n = 48 samples and the final results are shown in Table 4.
Parameter identification results of the MDOF structure under Gaussian noise (n = 48).

MDOF: multi-degree-of-freedom.
Structural parameter identification with non-Gaussian noise
Non-Gaussian noise can be generated from equation (7)

In this equation, r(i) obeys t distribution of which mean value is 0 and freedom is 3. With the time step of 0.02 s, the time-history curve of r(i) can be illustrated in Figure 10.

Time-history curve of r(i).
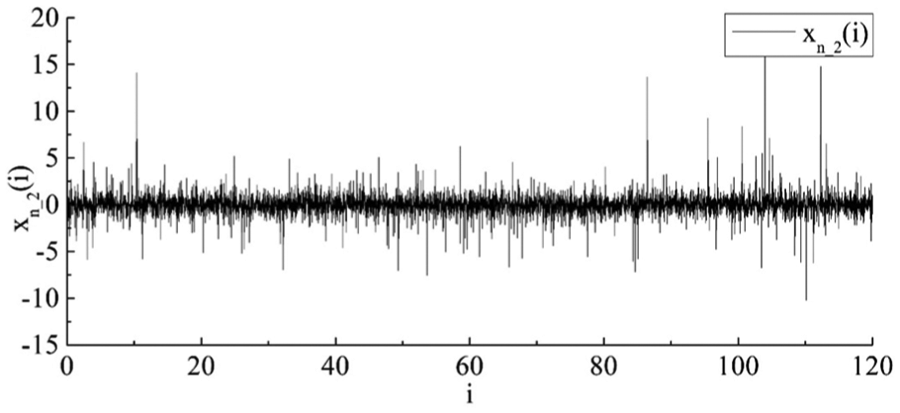
Time-history curve of non-Gaussian noise.
The structural parameter identification with non-Gaussian noise of different levels was carried out in similar to the parameter identification with Gaussian noise, and the identification results are described in Figures 12 and 13.

Identification results of stiffness under non-Gaussian noise of different levels.

Identification results of damping under non-Gaussian noise of different levels.
It can be seen from Figures 12 and 13 that the changes of stiffness and damping have no obvious rules. For multi-degree structure, we choose n = 48 samples and the final results are shown in Table 5.
Parameter identification results of the MDOF structure under non-Gaussian noise (n = 48).

MDOF: multi-degree-of-freedom.
Analysis of structural parameter identification after damage happens
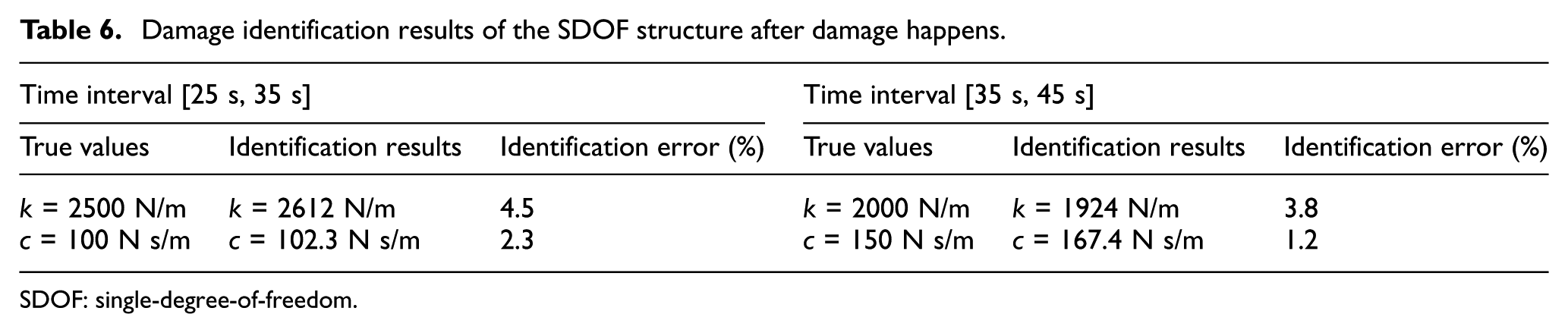
Considering the existence of structural damage, the true value of stiffness changes from ki = 2500 N/m to ki = 2000 N/m and damping from ci = 100 N s/m to ci = 150 N s/m. This is to say, in the time interval of [25 s, 35 s], ki = 2500 N/m, ci = 100 N s/m and in the time interval of [35 s, 45 s], ki = 2000 N/m, ci = 150 N s/m. For single-degree structures, parameter identification results with no noise are shown in Table 6.
Damage identification results of the SDOF structure after damage happens.
SDOF: single-degree-of-freedom.
For multi-degree structures, when n = 48, parameter identification results with no noise are shown in Tables 7 and 8.
Stiffness identification results of the MDOF structure after damage happens (n = 48).
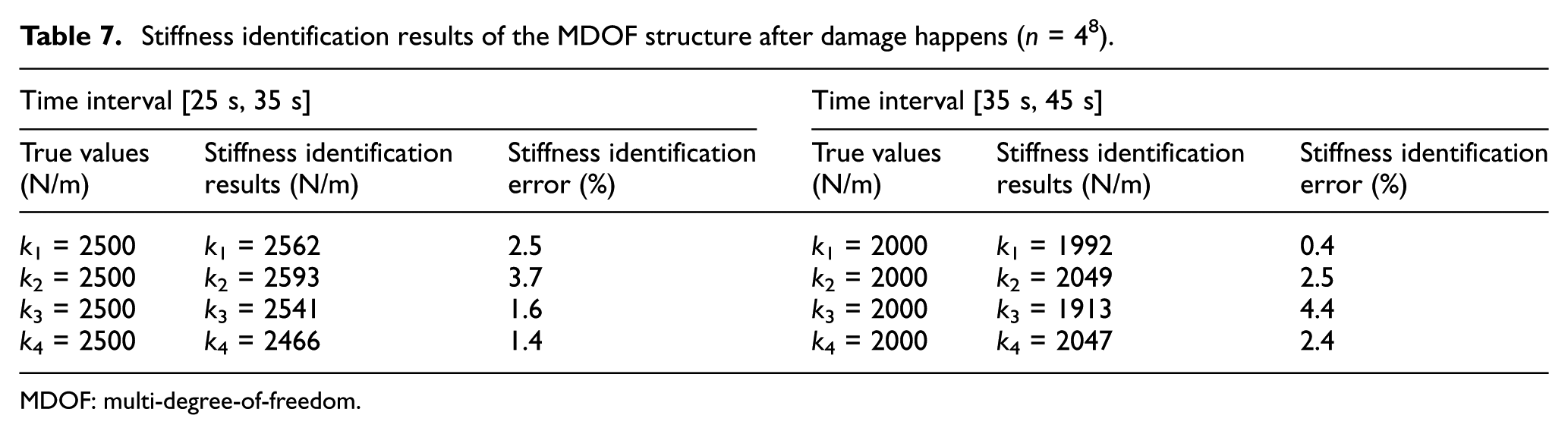
MDOF: multi-degree-of-freedom.
Damping identification results of the MDOF structure after damage happens (n = 48).
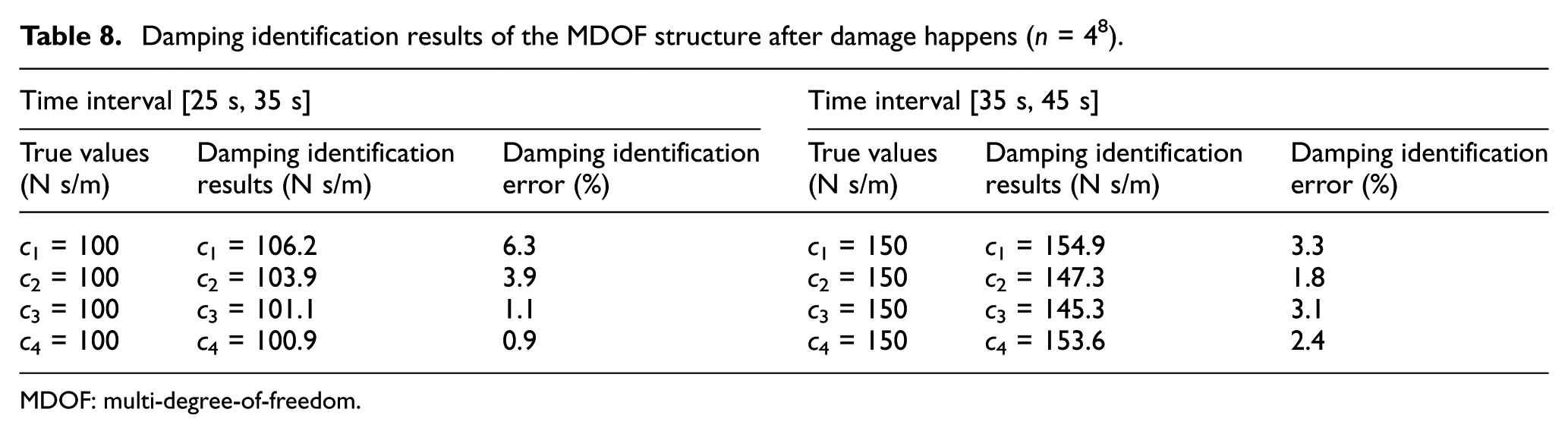
MDOF: multi-degree-of-freedom.
Experimental verification
To verify the correctness of the proposed method in structural parameter identification, as well as the damage identification, experiments are conducted. An aluminum frame with four layers is adopted in the experiments, as shown in Figure 14. The size of each floor slab is 300 mm × 200 mm × 12 mm; the mass of each floor is m1st = m2nd = m3rd = 2.342 kg. At each floor, there are four columns. In the experiment, damages are simulated by replacing a normal column with a thin column or totally removing that column. For a normal column, its size is 235 mm × 40 mm × 1.5 mm, while the size of a damaged column is 235 mm × 30 mm × 1.5 mm, which actually has 6.25% of stiffness decrease compared to the intact one.

Test models and the distribution of acceleration sensors.
In the experiment, for the convenience, the excitation is using a vibration exciter to produce vertical force at the top, instead of putting the earthquake motions at the ground. The vibration exciter is installed firmly at the top layer of the frame. The total mass of the vibration exciter is 6.0208 kg, including the moving part of 0.6 kg. At the lower three floors, there are two accelerometers deployed at each floor slab. While at the top floor, one accelerometer is installed at the floor slab to get the floor acceleration and the other accelerometer is installed on the moving part of the vibration exciter, from which the exciting force at the top can be obtained. The acceleration at the moving part in the experiment can be shown in Figure 15.

Acceleration at the moving part of the vibration exciter.
In the experiment, totally five structural damage cases are studied, including one intact case and four damaged cases with damage occurring at the first or second stories, as shown in Table 9.
Experimental results in different damage cases.
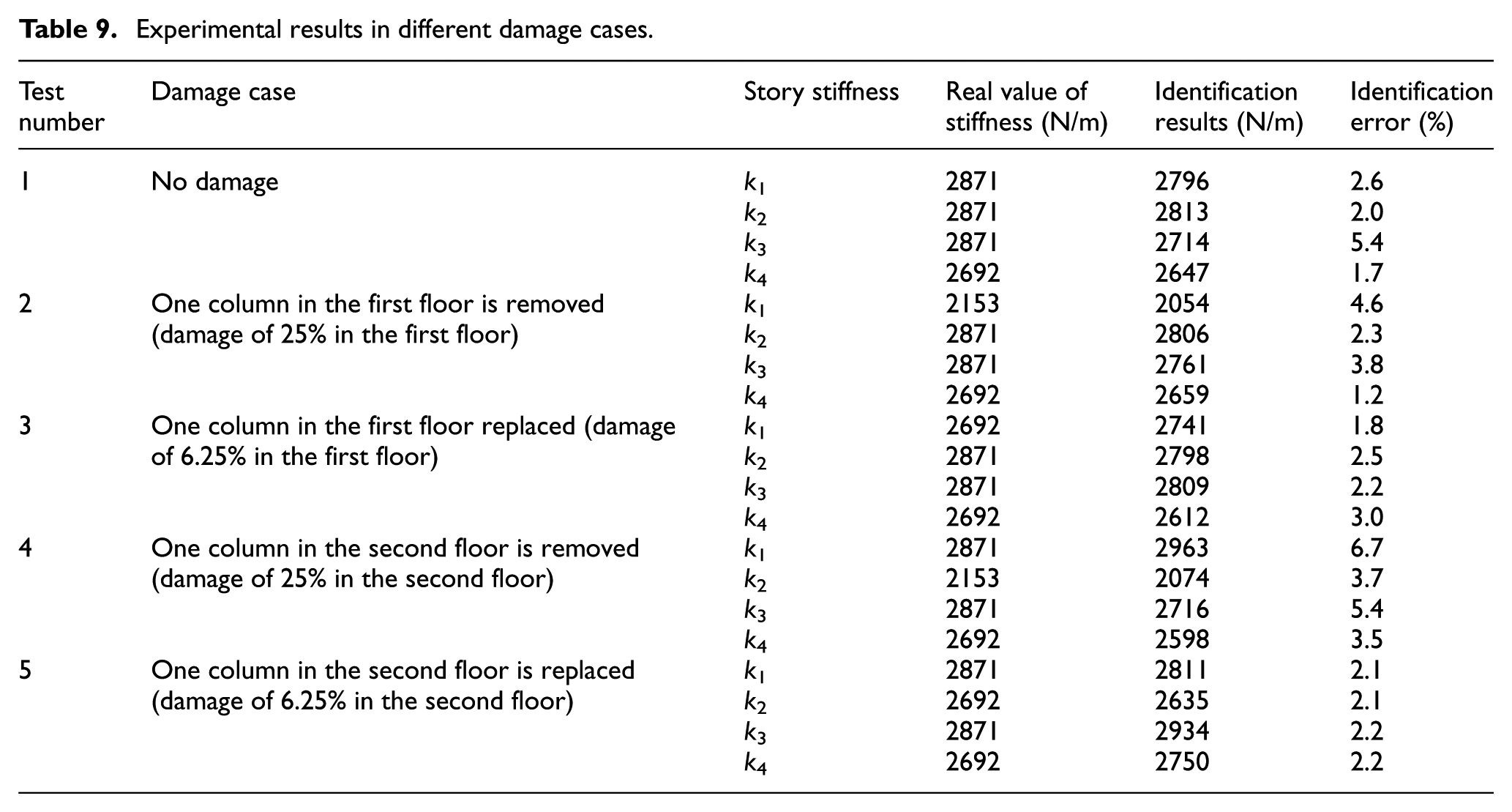
Experimental results considering different damage cases are shown in Table 9. Through the comparison between the identified stiffness values and the real ones under different damage cases, the proposed method is proved to be very accurate and effective. Damages can be well detected and well quantified, which is very useful for the structural health monitoring.
Conclusion
Parameter identification of the SDOF and MDOF structures under no noise, Gaussian noise, and non-Gaussian noise of different levels are studied and discussed. Through the comparison, it can be found that the proposed method can help to identify the structural parameters. With the increase of sample numbers, the error of structural parameter identification decreases. The structural parameter identification based on Monte Carlo method and likelihood estimation shows favorable anti-noise performance. Unless the level of noise reaches a certain degree, the identification results seem to be robust to the noise.
Considering the existence of structural damage, the identification results show the good consistency with the present actual status of the structure. Through the comparison with the true values of parameters in the experiments, the stiffness identification results of each floor in the aluminum frame under different damage cases show the good performance and effectiveness of the proposed method in structural damage detection and evaluation. The proposed method is found to be effective in identifying the parameters such as stiffness and damping of structures, with high accuracy and stable performance, which could be well extended and applied in the identification of actual damaged structures.
Footnotes
Handling Editor: Wenbing Zhao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (nos 51578140, 51478356); the National Key Research and Development Program of China (2016YFE0127600); Shanghai Municipal Education Commission—Gaofeng Grant Support; a Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD, no. CE02-2-8); and Postgraduate Research & Innovation Program of Jiangsu Province and Fundamental Research Funds for Southeast University (no. KYLX15_0084).