
Abstract
Cybersecurity protection becomes an essential requirement for industrial production systems, while industrial production systems are moving from isolation to interconnection with the development of information and communication technology. Dynamic risk assessment plays an important role in cybersecurity protection, providing the real-time security situation to the industrial production systems managers. Currently, few researches in this domain focus on the physical process of industrial production systems, let alone considering the combination of attack propagation in cyber space and the abnormal events happening in physical space for risk assessment. In this article, an extended multilevel flow model-based dynamic risk assessment approach for industrial production systems is proposed, where the extended multilevel flow model models the production process graphically and describes the relationships among devices, functions, and flows quantitatively. Based on the extended multilevel flow model of industrial production systems, a Bayesian network is built to analyze the attack propagation over time, and the consequences of cyber attack in production process are assessed quantitatively. Some simulations on a chemical process system are carried out to verify the effectiveness of the proposed approach. The results demonstrate that this approach can assess the dynamic cybersecurity risk of industrial production systems in a quantitative way.
Keywords
Introduction
Industrial production systems (IPSs) are essential for modern society and the destruction of such systems would cause serious impacts on the national economy, public health, and so on.1–3 Nowadays, IPSs are moving from isolation to interconnection with the development of information and communication technology, which brings much advantages but also increases cybersecurity vulnerabilities of IPSs. More and more cybersecurity incidents have occurred in recent years, such as the hacking of a water treatment factory in Harrisburg in 2006, 4 the Stuxnet attack on the Iranian nuclear facility in 2010, 5 the BlackEnergy case occurring in the Ukrainian grid in 2015, 6 and so on, which demonstrate the importance of cybersecurity protection for IPSs.
Cybersecurity protection can be classified as static type and dynamic type, and the latter can manage the system risk caused by cyber threats under an acceptable threshold timely. 7 As discussed by Shameli-Sendi and Dagenais, 8 intrusion detection, risk assessment, and intrusion response are the main parts of the dynamic cybersecurity protection framework, which forms a closed-loop together with the target system. More specifically, intrusion detection monitors the system for abnormal activity online, and then reports to the collected modules that the cause of abnormal activity are cyber-attacks or faults; 9 risk assessment uses the attack information to assess the system risk which indicates the current cybersecurity situation of the system; intrusion response’s goal is to keep the system in a secure state when the risk value exceeds the threshold, and its behavior is making and activating cybersecurity strategy timely. Therefore, risk assessment is of great significance to dynamic cybersecurity protection for IPSs.
As special cyber-physical systems (CPSs), IPSs usually have a large number of devices which realize different functions, and these functions interact with each other to ensure the flowing of information and material. In addition, information flows in cyber space help to make control strategy, which manages the production process, and material flows in physical space describe the production process in detail. In most intrusion cases, the goal of cyber-attackers is to disturb the production process by tampering the control strategy; besides, the attack process may lead to abnormal production capacity or serious incidents, which increases the system risk. Based on the risk definition in Kaplan and Garrick, 10 risk assessment for IPSs needs to consider two factors: the probabilities of the compromised control strategies and the loss caused by the compromised control strategy.
Some related works have been done to assess cybersecurity risk in CPSs by exploiting different methods. A network security risk model was provided by Henry and Haimes, 11 which analyzed the influence among different components and built-attack scenarios. A multimodel for risk assessment was constructed to describe the relationship among attacks, functions, and incidents in Zhang et al. 12 Ten et al. 13 proposed a SCADA security framework and gave the approach to calculate the vulnerability indices. An risk assessment approach based on system dynamics was provided in Garbolino et al., 14 which considers the complexity and changes in the system over time. A novel approach in Genge et al. 15 used the measured values of the observed control variables to evaluated the cyber attack impacts. Li et al. 16 analyzed the asset contents by considering the construction, function, location, and so on, and then quantified the cyber attack impact based on the asset definition. A safety/security risk analysis approach in Abdo et al. 17 combined the attack tree with bowtie analysis, which builds risk scenarios with the cyber-attacks and faults. In addition, Cherdantseva et al. 18 reviewed the cyber risk assessment methods of SCADA system and Teixeira et al. 19 gave a quantitative risk management for control system. The above works analyzed the different aspects of the industrial control system risks, but they cannot be utilized on risk assessment for IPSs directly, for the following reasons: First, many works, such as, Zhang et al., 12 Ten et al., 13 and Genge et al. 15 did not analyze the physical process quantitatively, which are managed by control strategy, let alone the loss calculation due to compromised control strategy in physical space; Second, many works, such as Henry and Haimes, 11 Garbolino et al., 14 Genge et al., 15 and Li et al. 16 did not consider the attack propagation and infer the probability of compromised control strategy over time. In a word, although considerable works contributed to risk analysis for IPSs, most of them are still limited to assess the cybersecurity risk of IPSs quantitatively.
In this article, we consider and analyze the abnormal event (tampering the control strategy), its probability, and consequence (loss of product reduction and serious incidents) in risk assessment comprehensively. As a result, an extended multilevel flow model (EMFM)-based dynamic risk assessment approach is proposed that covers probability inference and loss calculation. First, traditional multilevel flow model (MFM) is extended to describe the relationships among devices, functions, and flows in IPSs quantitatively, then the EMFM is used to model the production process graphically and forecast the consequence of abnormal event. Second, the cause–effect relationship between cyber-attacks and abnormal control strategy is analyzed using the information flow in EMFM, and on this basis a Bayesian network is built to infer the abnormal event probability over time. Finally, from the probability inference and loss calculation based on EMFM, the dynamic risk of IPSs can be obtained with the input of attack evidence over time, and the effectiveness of our approach is demonstrated through the simulation on a chemical control system.
The rest of this article is organized as follows. Section “Background” discloses the characteristic of the IPSs risk, the advantages and disadvantages of the traditional MFM, and then puts forward the risk assessment architecture for IPSs. Section “System modeling with extended MFM” redefines the function and flow in EMFM, and introduces the modeling process of an IPS using EMFM. Based on the EMFM, section “Extended MFM -based risk assessment” provides the detailed risk assessing process, which includes probabilty inference and loss calculation. Section “Simulations and risk analysis” verifies the effectiveness of this risk assessment approach by some simulations on a chemical process system. The conclusion and remarks are provided in section “Conclusion.”
Background
Cybersecurity risk in IPS
The structure of typical IPSs is shown in Figure 1, where the control center connects the subprocess control systems via communication link, collecting information for data analysis and coordinating all the subprocess control systems. Each subprocess control system controls a production subprocess, which is one stage of the entire production process and realizes a special transformation of materials.20,21 The outputs of the subprocess control systems, which act on production subprocess directly, constitute the control strategy.

Structure of typical IPSs.
Due to the IPS characteristics mentioned above, the cybersecurity risk of IPSs is different from other systems. Cyber attackers exploit system vulnerabilities to obtain device authorities in cyber space so as to disturb the information flowing in subprocess control systems to tamper the control strategy. The abnormal strategy might cause hazardous events in the production subprocess, such as abnormal material output or serious incidents. Due to the interdependence of different production subprocesses, the hazardous events in one production subprocess may spread to its neighbors, which causes the system production capacity deviating from the managers expectation. Therefore, risk analysis in IPSs needs to consider two aspects: the relationships between cyber attacks and compromised control strategies; the spreading process of hazardous states caused by compromised control strategies among different production subprocesses in physical space.
MFM
MFM22–24 is an explicit means-end model, and it can describe the structure and goal of industrial systems in a graphical way. As shown in Figure 2, MFM includes two basic types of concepts: function and flow, where function is a role that a system has in the achievement of a goal and consists of many devices, and flow is a structure that describes the flowing process of information or material. Besides, functions are classified into information type and material type, and each flow is constructed by connecting related functions.

Graphic symbols of MFM.
MFM contributes to risk assessment for IPSs, where the definition and the causal relationship of functions disclose the relationship between device and function in IPSs, and the description of flow in MFM helps to model the IPSs structure from functions perspectives. However, MFM defines the functions qualitatively such that it cannot describe the transformation of material in production process quantitatively, let alone forecasting the production capacity when the system is under abnormal control strategy. In addition, MFM is a static model and the flows do not have the ability to model the production process dynamically. In order to address the above shortcoming, we redefine the function and flow quantitatively, which can describe the operation process of IPSs dynamically.
Dynamic risk assessment architecture
The proposed dynamic risk assessment architecture for IPSs is shown in Figure 3, where the architecture has attack evidence and control strategies as input, and the system dynamic cybersecurity risk as output.
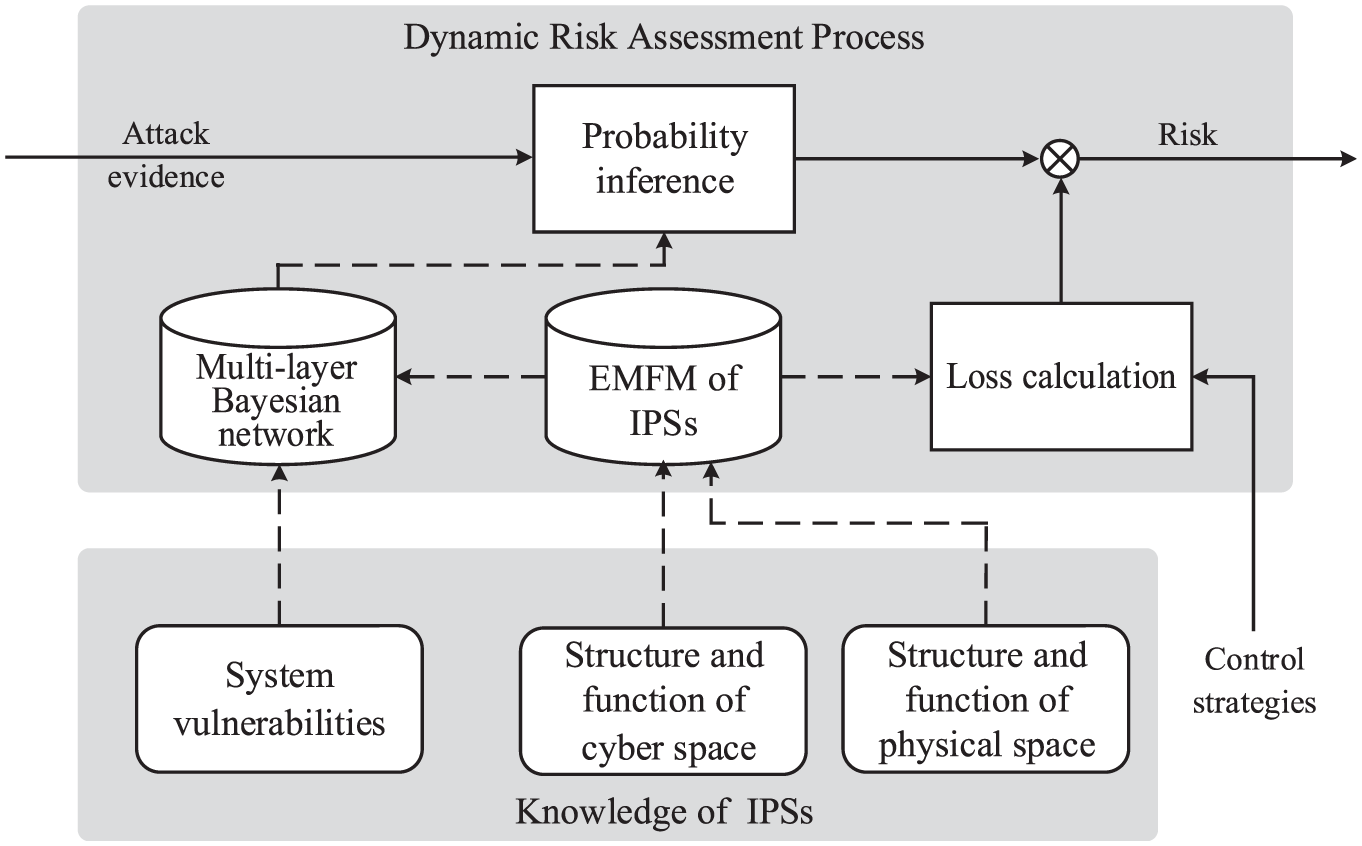
Architecture of dynamic risk assessment.
The dynamic risk assessment includes two main processes: probability inference and loss calculation. In the former process, a multilayer Bayesian network based on the EMFM is built to describe the attacks propagation in cyber space and infers the probabilities of control strategies. In the loss calculation process, EMFM describes the entire production process quantitatively, which is used to forecast the product reduction and serious incidents caused by the abnormal control strategies, and calculate the loss of these consequences in terms of money. Finally, the system risk is obtained by multiplying the probability and loss of each abnormal control strategy and adding up all the products.
System modeling with extended MFM
Extended MFM
The EMFM adopts the same graphic symbols as MFM shown in Figure 2 and redefines these symbols in a quantitative way. The extended contents of function and flow are introduced as follows.
Function
A function is a role played in the achievement of a goal, which is realized by many related devices.
22
Parameters set
Behaviors

Parameters set of function.
Flow
A flow is constructed by connecting functions according to the input/output relationship and describes the flowing process of material or information.
Structure of information flow and material flow.
Supported functions set
Structure matrix
Flow parameters


Flow parameters of material flow also has two types of subset: flow input
At the end of this section, a simple example is given to explain function and flow. Assume that water is pumped from a pool to a tank, and flows to a customer through a pipeline with a valve; besides, the water level of the tank is monitored by a sensor and impacted by the pump and the valve. The whole control process is controlled by a programmable logic controller (PLC). In this process, there exists one material flow and one information flow. Specifically, the material flow consists of five functions: a source (pool), a transport (pipeline and pump), a storage (tank), another transport (pipeline and valve), and a sink (customer). The information flow consists of an observer (sensor), a decision (PLC) and an actor (PLC). Besides, the output flow parameter of material flow is the velocity of water received by customer (the input flow parameter is infinite), the flow parameter of information flow includes the collected information (water velocity, level in tank, valve opening, and pump power), and control command (opening setting of the valve, power setting of the pump).
Modeling process of the extended MFM
In order to describe the production process and its control process quantitatively, an EMFM for IPSs is built, and the modeling process is divided into three steps.
Step 1. Divide the target IPS into several subsystems according to the structure as shown in Figure 1. The detailed processes are listed as follows.
The production process is divided into several interdependent subprocesses in physical space, where each subprocess manages a special transformation of material. The control system of each production subprocess is analyzed, where the boundary and the devices in each control system are determined.
Step 2. The devices in IPSs can be modeled into several functions such as source, storage, conversion, and observer. The processes are listed as follows. The devices that belong to a production subprocess and its control system are grouped into many corresponding functions shown in Figure 2, which is based on the definition of functions in Larsson.
22
The input, output, and states of each function, which are related to the material process, information process, and incidents, are determined and viewed as the parameters set of that function. The behaviors of material function are derived from the laws of physical,25,26 or from fitting historical samples.27,28 The behavior of information function can be derived from the laws of control process.
Step 3. Each production subprocess is modeled as a material flow while its control system is modeled as an information flow. The process is explained as follows. Connect material/information functions into material/information flow according to the causal relationship among the functions. Based on the above steps, the supported functions set and structure matrix of each flows are provided, and the flow parameters are obtained by the input and output of production subprocess or its control system.
Extended MFM-based risk assessment
Probability inference for control strategies
In this article, Bayesian network is adopted to infer the probability of compromised control strategies. Bayesian network is a probabilistic graphical model29–31 and is defined by a 3-tuple
Attack strategy layer: the attack strategy on IPSs is complex because of the system characteristic and technology development, which consists of multiple-steps atomic attacks. By the way, an atomic attack represents a special attack process which is launched from resource device to target devices. In additional, the goal of an atomic attack is to gain the authorities of target device, and the precondition of launching such an atomic attack is that the authorities of resource device have been gained. Therefore, the purpose of launching an atomic attack is to prepare for the following atomic attacks. Based on this analysis, the attack strategy can be modeled as a directed acyclic graph whose nodes are the coresponding atomic attacks. This process can be modeled by

where
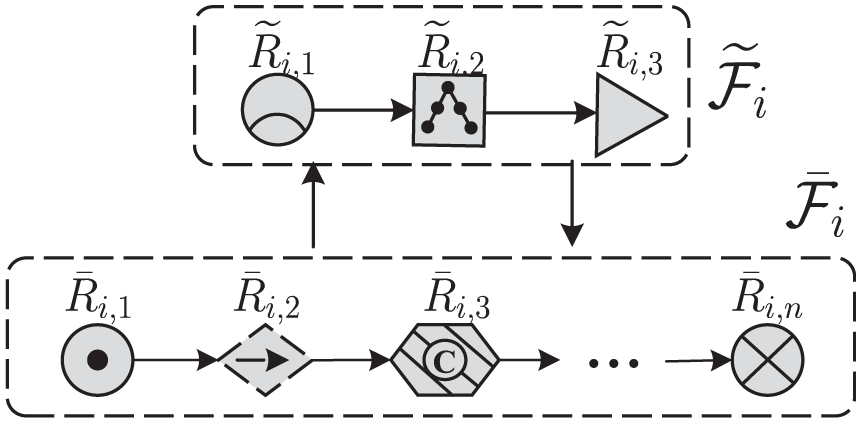
2. Information flow layer: as discussed in section “Extended MFM,” each flow is constructed by many connecting functions and each function is a combination of many related devices, so the compromission of cyber devices will cause the abnormal output of information flow. This process is described by equation (4) as

where the set
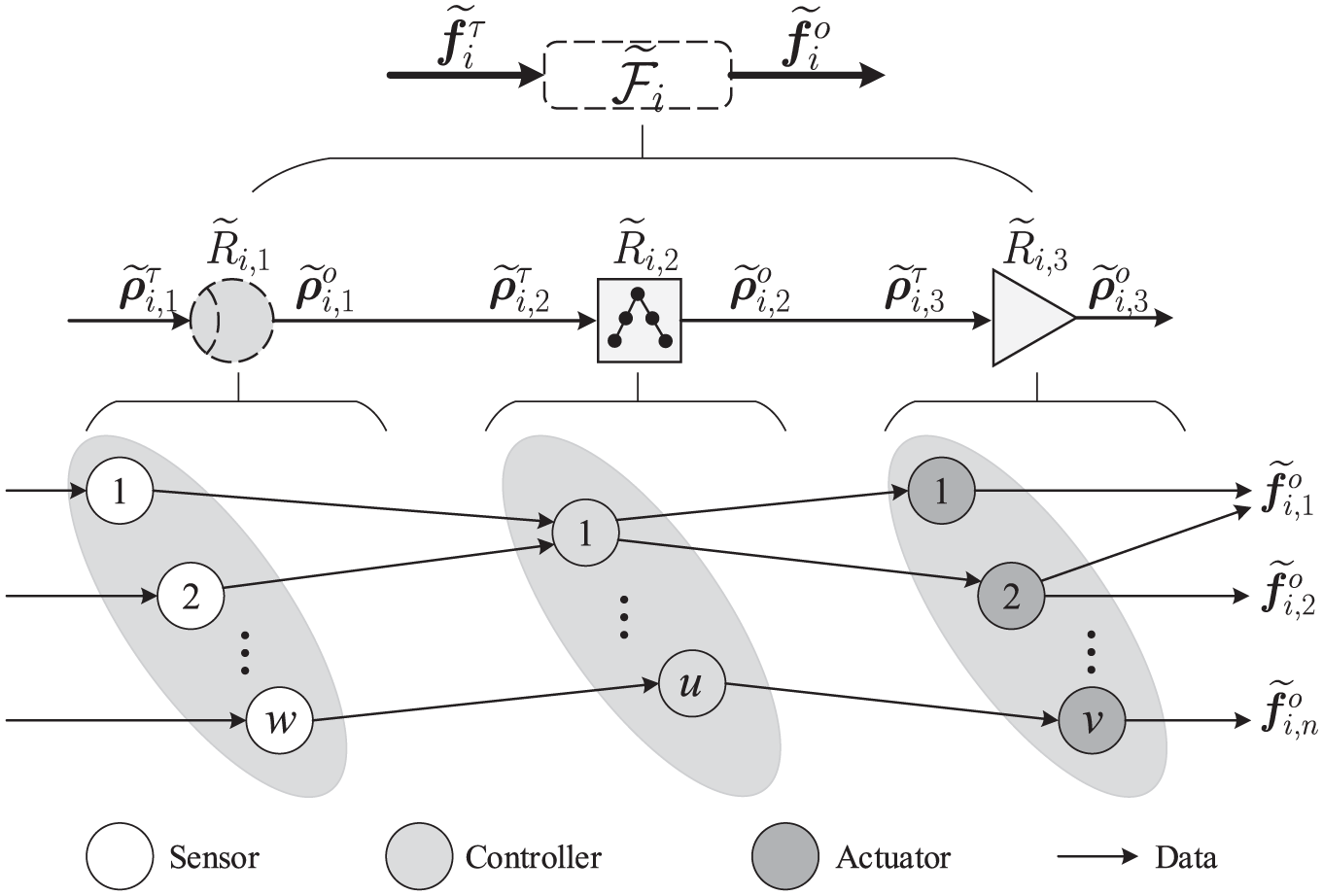
Relationships among devices, functions, and flow in
In the same way,

Finally,

3. Control strategy layer: control strategy is the bridge between cyber space and physical space, which is generated by the whole control process. In EMFM of IPSs, each subcontrol process is modeled as a information flow, so that the control strategy consists of the output of all information flows.

where
The Bayesian network for probability inference of control strategies called

where

Loss calculation of control strategies
Assume that an IPS has
Information flow
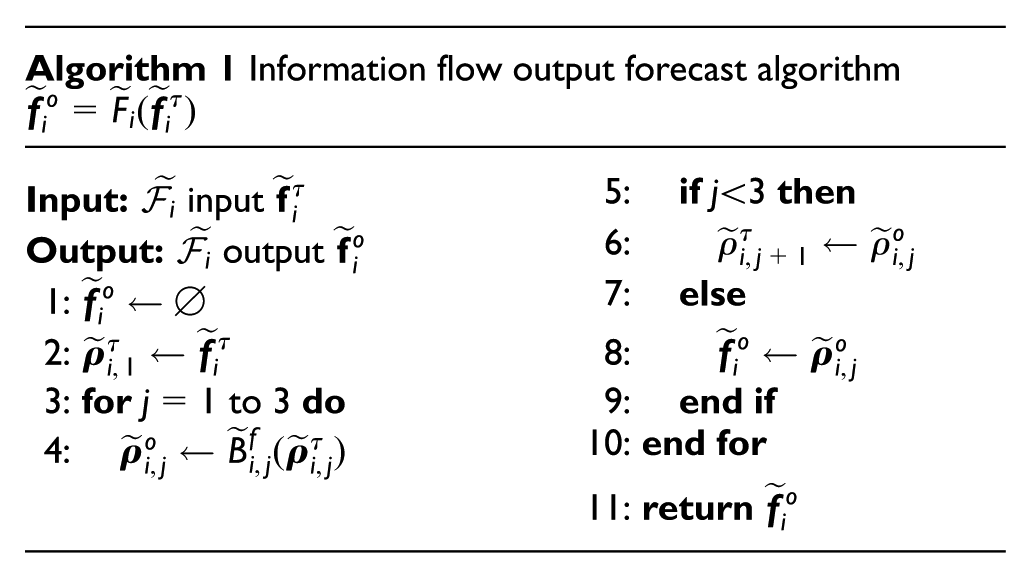

The hazard states in one material flow caused by compromised control strategy may spread to its neighbor. Assume that the output of
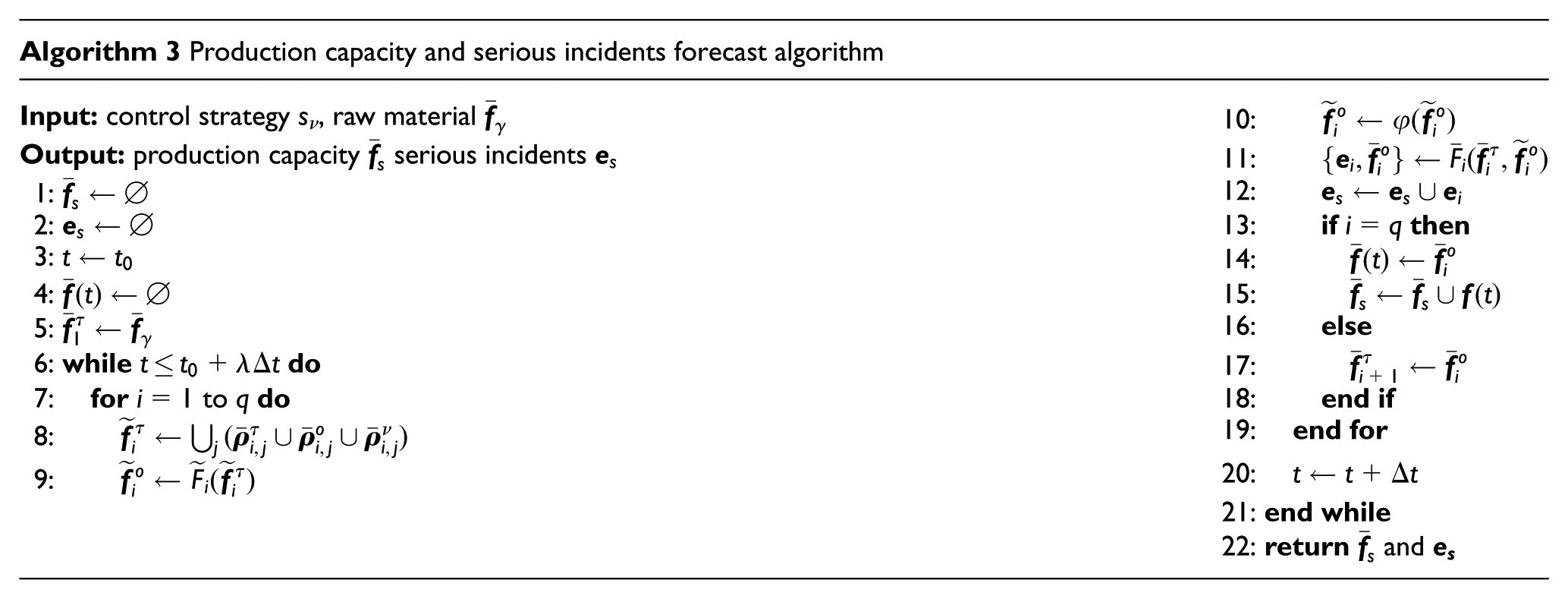
Based on Algorithm 3, the consequences of
Abnormal production capacity deviates from the IPS owner’s expectation and causes sales reduction, while serious incidents have negative impacts on the environment, personal safety, system devices, and so on.
12
Assume the expected production capacity is a fixed value

The loss caused by serious incidents is calculated by equation (11) as

where

Obtainment of the dynamic risk
As discussed in Kaplan and Garrick,
10
the notion of risk involves both uncertainty and damage under different scenarios, which can be defined by a 3-tuple

where
Simulations and risk analysis
Simulation platform and models
A chemical system is shown in Figure 7, and the production process is divided into three subprocesses. Specifically, in the reaction process, two types of raw materials are transported through pipelines to the reactor, where product and byproduct are generated. The separation process uses a condenser and a separator to separate the product from the byproduct. In the extraction process, a stripper removes the impurities from the product. Each subprocess is controlled and supervised by a human–machine interface (HMI), respectively, and the three subprocesses are coordinated by an engineer station (ES).

Structure of a chemical process system.
Each subprocess can be modeled as a material flow, and its control system can be modeled as an information flow. Table 1 provides the relationships among devices, functions, and flows of the reaction process and its control system. Note that there are two types of functions, the sources and the sinks, which are defined by
Description of the reaction process and its control system.

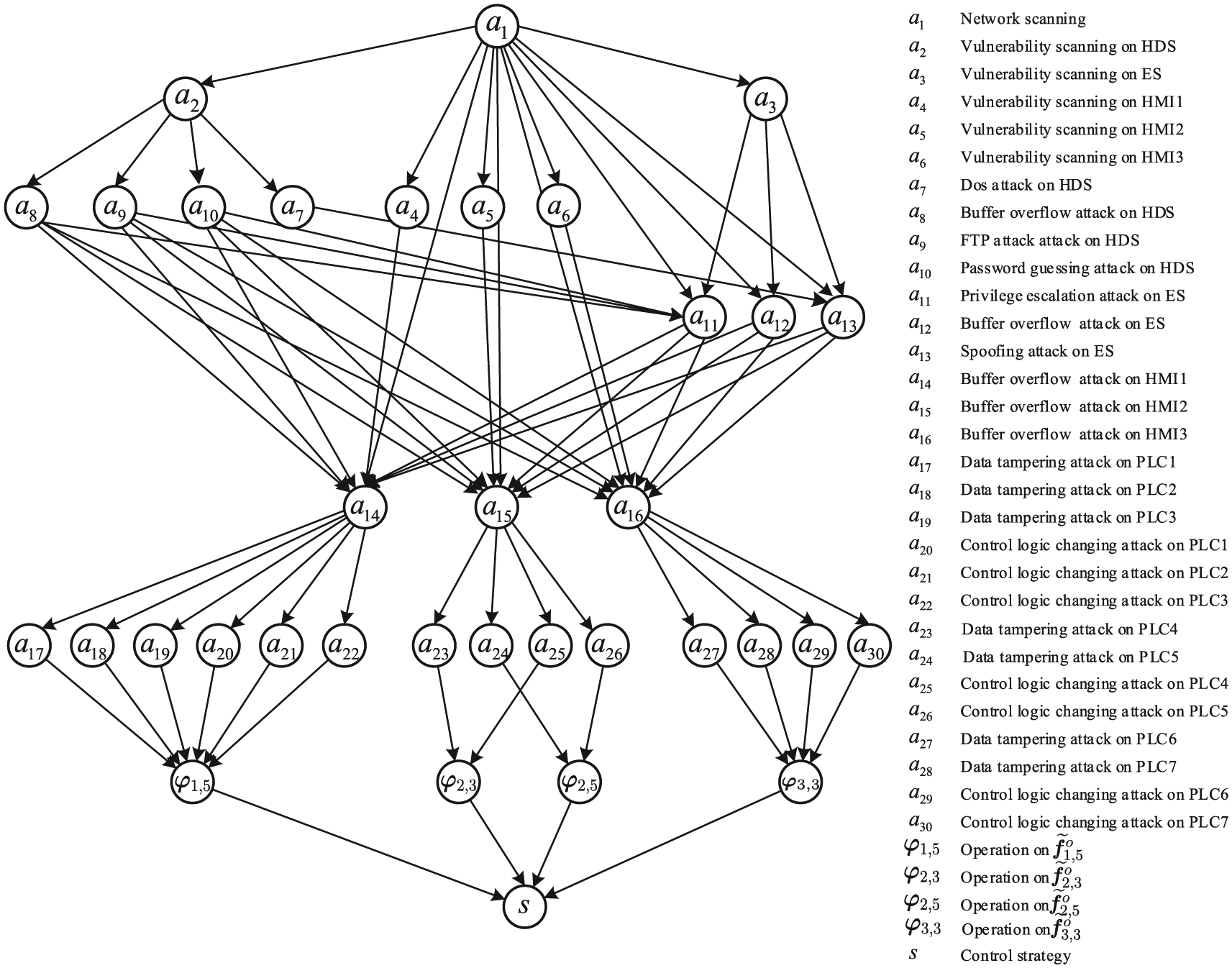
As shown in Figure 8, for the chemical system, the chemical process system is viewed as an integration of three information flows and three material flows, and each flow consists of several functions. Besides,

EMFM of the chemical process system.
Bayesian network for probability inference.
Based on the above works, a three-layer Bayesian network is built to infer the probabilities of the compromised control strategies, where the attack layer describes the relationships among different atomic attacks
Result analysis
Probability inference
The attack evidence
List of attack evidence.

The result of the probability inference with

Probabilities of control strategies.
Loss calculation
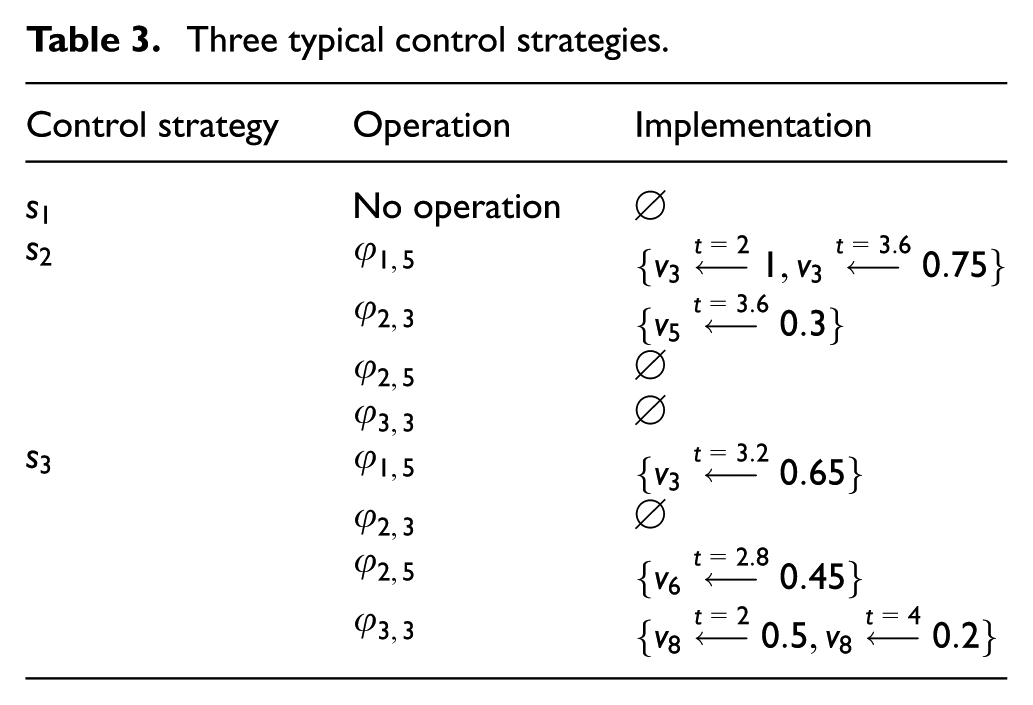
Table 3 provides three compromised control strategies which consist of different operations, and each operation represents a combination of several alterations on
Three typical control strategies.
The result of the production capacity
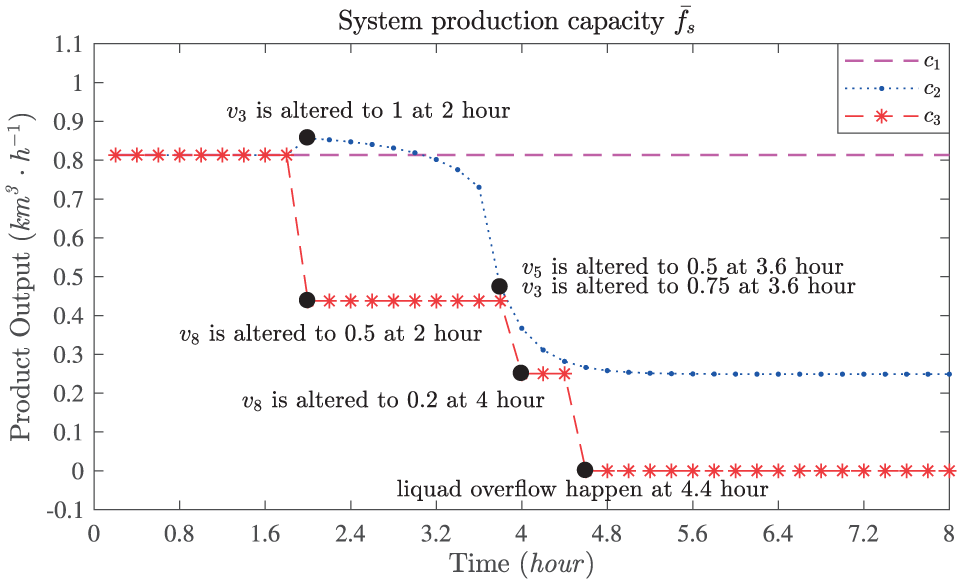
Production capacities of
In Figure 12, solid lines and dotted lines represent the states parameters when system is under control strategy

State parameters of
From the above simulations, production capacity
Risk assessment
Based on the above simulations, the cyber risk of the IPS is shown in Figure 13. In this figure, the risk becomes larger greatly when the attacks
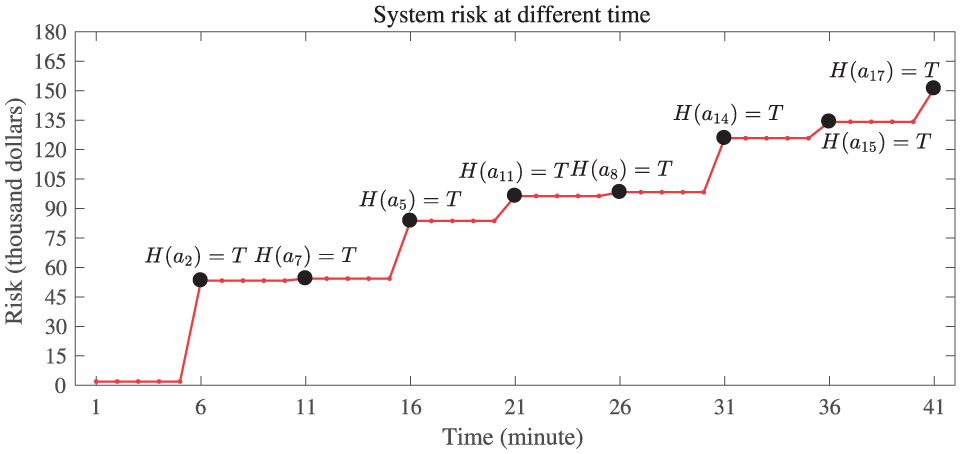
System risk at different time.
Execution time
To demonstrate the execution time of our approach, several simulations are designed. Because the loss calculation is simulated offline while the probability inference is simulated online, the whole execution time equals to the time cost of probability inference. The simulation of the Bayesian network shown in Figure 9 is run on a computer with Intel processor(2.20 GHZ) and 4 GB RAM 1000 times, the average execution time is 0.086 s, the minimum execution time is 0.075 s, and the maximum execution time is 0.131 s. In order to get the execution time of other types of Bayesian networks, several simulations are conducted and the results are shown in Figure 14.
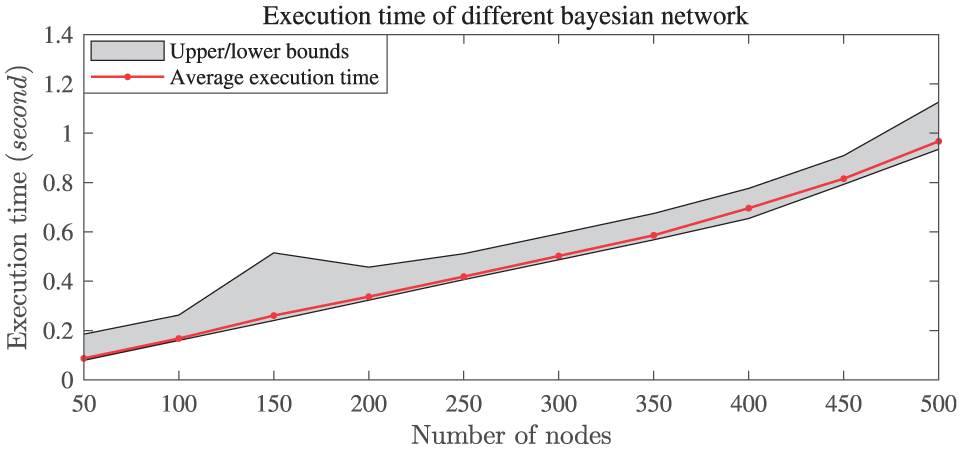
Execution time of different Bayesian networks.
Several five-layer Bayesian networks with 100, 200, 300, 400, and 500 nodes are executed in MATLAB, and the result is shown in Figure 14. In this figure, the average execution time increases linearly with the node number of the Bayesian networks, which means that the complexity of the inference algorithm is
Approaches comparison
It is clear that this risk assessment approach has the ability to assess the IPSs risk quantitatively, and it can provide the evaluation indexes of cybersecurity situation for the subsequent intrusion response. Risk assessment approaches of section “Introduction” employed different perspectives and scenarios, it is difficult to compare our work with others. But Table 4 presents some different input information, assessing process and other items between other approaches with our approach.
Risk assessment comparisons.

Conclusion
Dynamic risk assessment is of great significance to cybersecurity protection for IPSs, and is necessary to consider the system structure, the production process, and the corresponding control process. An extended MFM-based dynamic risk assessment approach is presented to tackle this problem. Traditional MFM is extended to describe the structure and operation process of IPSs from the perspective of functions and flows, which help to abstract a complex IPSs into a combination of several flows. Besides, this dynamic risk assessment provides a detailed loss calculation for the serious incidents and product reduction quantitatively, which is different from other approaches. And this approach also gives a probability inference for the propagation of cyber attacks, which considers the generation of control strategy. Finally, several simulations are carried out to verify the effectiveness of this approach.
This research only focuses on real-time attacks in cyber space, which is represented by the probability inference process in Bayesian network. But, the faults in system physical space are not considered in our approach online. A comprehensive dynamic risk assessment approach intergraded with real-time attack and fault will be investigated for IPSs in the future work.
Footnotes
Appendix 1
Handling Editor: José Camacho
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Science Foundation of China (NSFC) under grant numbers 61433006, 61272204 to author C. Zhou.