
Abstract
Direct position determination (DPD) is a single-step method that localizes transmitters from sensor outputs without computing intermediate parameters. It outperforms conventional two-step localization methods, especially under low signal-to-noise ratio conditions. This article proposes a reflector-aided DPD algorithm for multiple signals of known waveforms received by an array observer. In previous studies, reflector-aided localization has always required very precise locations of reflectors. Therefore, the localization performance depends sensitively on accurately knowing each reflector position. This study considers the presence of small biases in reflector locations. To make the problem tractable, we simplify the signal model through an approximation using the first-order Taylor expansion and then directly localize multiple sources in a decoupled manner. Unlike most DPDs that presume noise is spatially uncorrelated, our study imposes no restriction on the correlation structure of noise, allowing this algorithm to be used in more general scenarios. In addition, we derive the Cramér–Rao bound expression and perform an analysis of the direct locations of multiple signals when the reflector positions are assumed accurate but in fact have small biases. Simulation results corroborate the theoretical results and a good localization performance of the proposed algorithm in the presence of small reflector position biases.
Keywords
Introduction
The problem of passive localization attracts significant interest in various fields such as array signal processing, radar, sonar, seismology, and radio astronomy.1,2 This study investigates the passive geolocation of multiple transmitters for a specific geolocation architecture called reflector-aided single-platform geolocation (SPG). Introduced by Bar-Shalom and Weiss,3,4 this architecture has several advantages over the geolocation system comprising multiple receivers. For example, system deployment costs, including the amount of transferred data required, are significantly reduced. 4 The SPG system consists of a single receiver equipped with an antenna array and multiple reflectors that are placed at known locations. These reflectors reflect the transmitter’s signal toward the array receiver and therefore produce the signal multipath.
To address the localization problem in the multipath environment, many two-step processing methods have been developed,5–10 where the measurement parameters (e.g. direction of arrival (DOA) and time of arrival (TOA)) of the multipath signals are first extracted and then the source positions are estimated using statistical or parametric methods. 5 Because they involve two separate estimation steps, they cannot guarantee high localization precision for the following two reasons:11,12 (1) they estimate parameters at each observer separately and independently, as the constraint that the measurements correspond to the same transmitter location is ignored; and (2) data associations are necessary. If the measurements are not related to the correct path, over-modeling occurs, leading to spurious paths 13 and hence additional errors. Moreover, two-step processing methods are computationally demanding for locating multipath sources because the computational complexity of the intermediate parameter estimations increases exponentially with the number of paths.
In contrast to the conventional two-step methods, direct position determination (DPD) is a single-step localization method without needing to compute the intermediate parameter values and augments the position estimation with the constraint that all measurements correspond to the same geolocation of the transmitter. In the multipath environment based on a single-bounce channel model, a DPD algorithm was proposed to localize multiple sources when the positions of the main scatterers or reflectors are known. 13 It employs a stationary array to directly localize multipath signals by minimizing a multiple signal classification (MUSIC)–type function in terms of source positions without explicitly computing DOAs or TOAs. This method takes advantage of the multipath structure and is in fact reflector-aided, whereas it is suboptimal compared with the maximum likelihood (ML) estimators. Using the reflector-aided SPG system, Bar-Shalom and Weiss,3,4 developed the ML-based DPD algorithms for a single transmitter, where the transmitted waveform is either known or unknown a priori. Their geolocation system consists of a single stationary or moving receiver, and several static, passive transponders acting as ideal signal reflectors. With accurate positions of the transponders, multipath components are incorporated to implement the localization aided by geometric information. As opposed to the two-step localization methods, the foregoing DPDs directly localize the transmitter from the sensor output by exploiting the location information contained in the multipath components. As a result, they achieved higher localization accuracy, especially under low signal-to-noise ratio (SNR) conditions. Despite this progress, these DPDs encounter two problems. They require very precise knowledge of the reflector locations, and hence, their location performance is very sensitive to the accuracy of each reflector position. However, in reality, the true reflector positions may be different from their nominal values for various reasons, and a slight error in the reflector positions ultimately generates extra errors in source location. Another limitation is that they are vulnerable to spatially colored noise since they presume that the noise is spatially uncorrelated, whereas the noise is frequently correlated along the array with an unknown correlation structure. 14
In certain applications, the transmitted waveforms are known to the receiver,15,16 for example, the synchronization and training sequences are transmitted periodically and are known a priori in cellular systems. In this article, we consider the reflector-aided SPG system and concentrate on the localization of multiple signals with known waveforms and unknown complex attenuation under multipath propagation. Similar to previous studies,3,4,13 the geometric relationship of reflectors, receiver, and transmitters is used to locate multipath signals based on a single-bounce channel model. More practically, we assume that the nominal positions of the reflectors are available, but small biases in the reflector positions exist for the indirect paths of each source.
Our contributions are summarized as follows:
We establish a simplified signal model using the first-order Taylor series approximation, and thereby separate the parameters of unknown biases from those of source locations.
Based on this simplified model, we propose a single-step location algorithm that applies the weighted least squares (WLS) criterion with the optimal weighting matrix, which is a realization of the ML estimator. This algorithm enjoys the following features:
It avoids data association and is not sensitive to spurious paths caused by over-modeling. It demonstrates high localization accuracy in the presence of small reflector position biases. It places no restrictions on the model of noise and hence is effective in spatially uncorrelated noise, as well as spatially correlated noise with unknown covariance matrix. It is computationally efficient as it makes use of the known waveforms to decouple the WLS-based localizations of multiple uncorrelated sources.
We evaluate the compact Cramér–Rao bound (CRB) for source position parameters based on the simplified model. The mean square error (MSE) of the locations is also derived when the WLS-based estimator assumes that the reflector positions are accurate but in fact have small biases.
Paper organization
The “Signal model and problem formulation” section establishes the signal model in the presence of small reflector position biases and formulates the problem. The “Decoupled location in the presence of small reflector position biases” section proposes the decoupled solution for the DPD for multiple sources in the reflector-aided SPG system. In the “CRB and MSE” section, we derive the CRB and the MSE without accounting for reflector position biases. In the “Numerical results” section, simulation results are presented forming the basis for a comparison of the proposed algorithm with other location methods. The “Conclusion” section concludes the study with a summary and remarks.
Signal model and problem formulation
In previous studies,3,4,13 reflector-aided SPG methods require a very precise knowledge of the reflector positions. A slight bias in the reflector positions ultimately generates an extra error in source location. This section shows how to construct the signal model and formulate the DPD problem in the presence of small reflector position biases. We shall first present the multipath signal model and then simplify it assuming that the reflector position biases are small. The simplification is necessary because it separates the biases from the source positions and makes the problem tractable. Finally, we relate the DOAs and TOAs contained in the multipath components to the geometric relationships between reflectors, receiver, and transmitters, and thereby formulate our DPD problem.
Signal model in the presence of reflector position biases
Let us consider a stationary receiver equipped with an antenna array of M isotropic sensors intercepting the transmitted signals. Here, Q transmitters radiate narrowband signals (i.e. the bandwidth of each source signal is small enough compared with the inverse of the propagation time over the array aperture) in the far field of the array. The transmitters and receiver are assumed to be time synchronized. There are NR reflectors within the area of interest, and the qth source signal arrives at the antenna array via Lq paths. As the single-bounce model is a simplified parametric model,
17
we consider the single-bounce reflection channel in our work (see Figure 1). Let
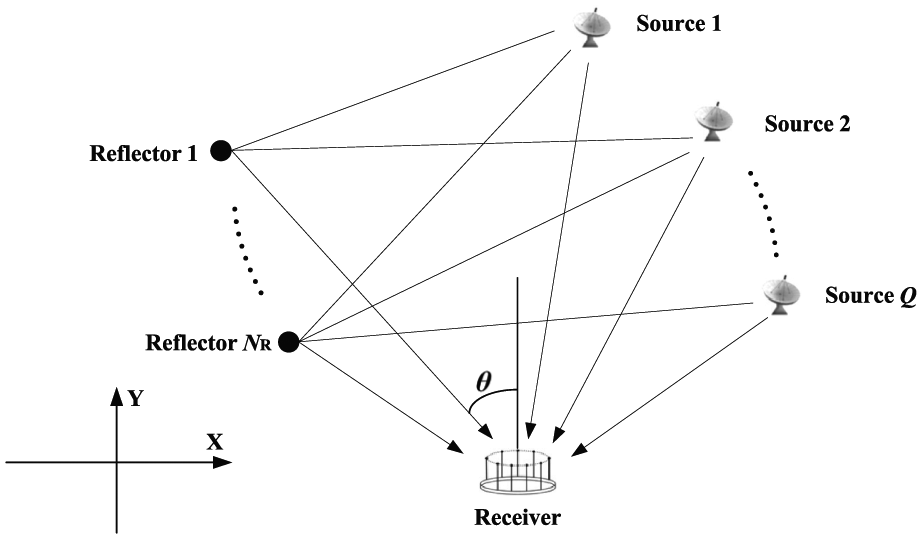
Scenario of the reflector-aided SPG based on a single-bounce channel model.
In this scenario, the observation

where l = 0 refers to the direct path;
In reality, the reflector positions are estimated in advance and then used to localize the transmitters.10,13 Localization inaccuracies of the reflectors produce true reflector positions that are different from the nominal values. Furthermore, even when different signals are reflected by the same reflector, the signals may be received from different positions corresponding to the main scatterers on this reflector. 10 We therefore assume that there are small biases in the nominal positions of reflectors, and the biases for the indirect paths of any two sources are different. With this assumption, the true reflector position for the lth indirect path of the qth source is expressed as

where lq denotes the sequence number of the reflector corresponding to the lth path of the qth source, and Δ
With the effect of the reflector position biases, the signal model in equation (1) becomes

where

and

in which Δθql and Δτql signify the corresponding offsets contributed by the reflector position biases.
Assuming that small reflector position biases result in small TOA offsets, Δτql, can be included in the phase shift. Hence, equation (3) is rewritten as

where fc is the carrier frequency of the transmitted signals.
Next, we partition the observed signal into K sections each of length T/K. Sampling the signals in each section at time intervals

where
Let us define
where
From equation (8), it is clear that the source positions, complex attenuation coefficients, and the reflector position biases have a nonlinear relationship in the observations, making the localization problem complicated. Furthermore, identifying all the unknown parameters is hard as the reflector position biases add to the numerous unknowns. To eliminate this difficulty in the ensuing, we apply an efficient approximation to simplify the signal model.
Simplification on signal model
Assuming small reflector position biases, we now come to simplify our signal model. As

in which

for
Substituting equation (10) into equation (8), we can approximate the frequency-domain sample as

in which

with
The expression in equation (11) can be written in a more compact form

where

with
Remark 1
Note that the unknown reflector position biases are incorporated into the complex attenuation coefficients for the indirect paths (i.e.
Problem formulation
As our work focuses on directly locating the multiple signals in the reflector-aided SPG system, we now express the nominal DOAs and TOAs in terms of the locations of the transmitters and receiver and the nominal locations of the reflectors

Furthermore, the following assumptions are adopted:
A1. The nominal positions and total number of the reflectors, NR, are known, whereas the number of paths for each source, Lq, is unknown.
A2. The signal waveforms are known and uncorrelated.
A3. The noise vector

where
Given the above assumptions, the problem addressed is to estimate the source positions given the frequency-domain samples of the K sections (see equation (13)). Different from the conventional two-step methods, we attempt to locate multiple transmitters in a single step using the geometric relation (see equation (15)) without explicitly computing TOAs and DOAs.
Decoupled location in the presence of small reflector position biases
We now have established the approximated signal model that accounts for small reflector position biases. In this section, as the transmitted waveforms are known to the location system in certain applications,15,16,18 we follow the idea of Weiss and Amar 15 to decouple the locations of multiple sources assisted by the known waveforms. Note that the unknown noise structure is considered in our study.
WLS-based function
For notational convenience, we define

where

depends on

as the optimal weighting matrix. As

where

Here,

in which

Decoupled solution for multiple sources
Solving equation (23) straightforwardly requires a high-dimensional search that is often impractical, and therefore, we exploit the information of known waveforms to ease the computation. Following the algebraic steps similar to those in Weiss and Amar, 15 the objective function in equation (23) is proportional to
Given that

where

With equation (25), we define another weighting matrix

with

Moreover, we concatenate all the frequency components and rewrite equation (28) in the more compact form

where

Thus, the solution of

Substituting equation (31) back into equation (29) yields the following function in terms of only the source position

Consequently, we establish the optimization problem to locate the

In this way, each source position can be determined via a two-dimensional search within the area of interest. Note that it is impossible to construct

After

where

The elements of
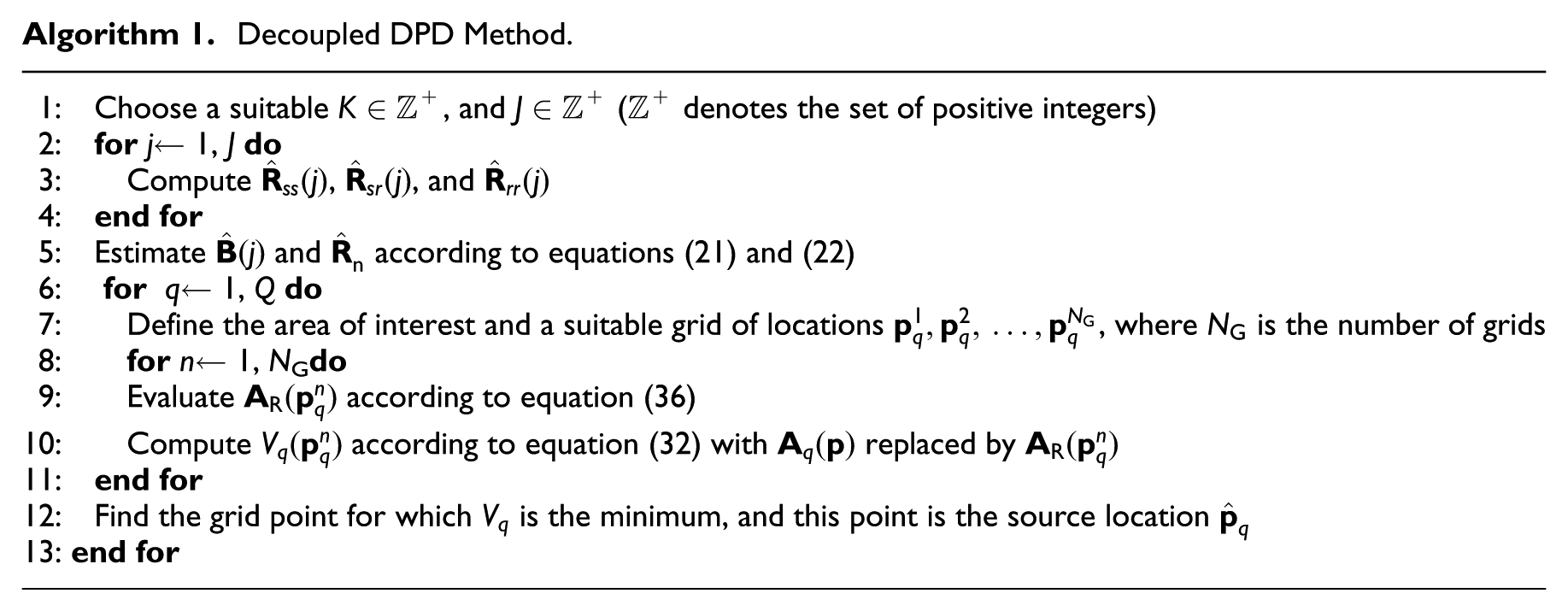
To summarize this decoupled DPD, we provide the procedure displayed in Algorithm 1.
Decoupled DPD Method.
CRB and MSE
To provide a benchmark for the highest localization accuracy that can be achieved, this section first evaluates the CRB regarding only the source position parameters based on the simplified signal model. Previous studies required very precise knowledge of the reflector positions. It is therefore of interest to examine the sensitivity of the localization precision to the biases of the reflector positions. To this end, we derive the MSE of the WLS-based estimator assuming that the reflector positions are accurate, but in fact the reflector positions have small biases.
CRB
To derive a compact CRB formula for only the source position parameters, we first state a proposition that has been proved in Pekka et al. 20 This proposition is crucial in evaluating the position-related block of CRB.
Proposition 1
Assume that
Recall the multipath signal model in the presence of small reflector position biases based on the frequency domain presented earlier

Relying on this model, an augmented parameter vector

where

According to Li et al.,
12
the CRB matrix for parameter

We now divide

with

From equation (40), as the sources are assumed to be uncorrelated, the CRB for the parameters of the qth source is

For notational convenience, let us define

Hence, equation (43) is expressible as

where

in which

Appendix 2 provides the derivation of the expressions for the sub-matrices in equation (47). Note that
We now introduce a new parameter vector

where

From equation (48), the relationship between vectors

where

In light of the proposition, the CRB matrix for vector

where the sub-matrix form of

Combining equations (47) and (53) yields, after some algebraic manipulations

Then substituting equation (54) back into equation (52), we have

where

and

Now, the CRB for

The trace of
MSE without accounting for reflector position biases
Next, the MSE for the locations is examined when using an optimum algorithm that assumes no reflector position biases, but in fact the reflector positions have small biases. We use a WLS-based estimator to analyze the corresponding MSE. This WLS-based estimator is computed following a similar procedure to that provided in a previous section, except that the reflector position biases are not considered here. We notice that if we replace

the obtained estimator becomes the one without accounting for reflector position biases. As the purpose of this subsection is to study the sensitivity to the reflector position biases, we assume that there is no spurious path and hence avoid any effects encountered under the condition of over-modeling. Therefore, the objective function for the qth source becomes

where

in which

Here,

Considering the nonlinear relationship between the objective function and

where

Then, substituting equation (61) into equation (65), the localization error of the qth source,

where


where

where

is related to the measurement noise from a finite number of samples (

represents the additional error resulted from the reflector position biases. Here,
Remark 2
Note that
Numerical results
Monte Carlo simulations were used to examine the localization performance of the newly proposed DPD algorithm and to validate the CRB and MSE analysis. Here, we consider that the receiver is equipped with a uniform linear array consisting of M = 10 sensors located at

where q denotes the qth source, and
Sensitivity to spurious paths
The first experiment examines the impact of spurious paths on the estimation accuracy of the proposed DPD algorithm. The noise is spatially uncorrelated with covariance matrix
The nominal positions of spurious reflectors in three cases.
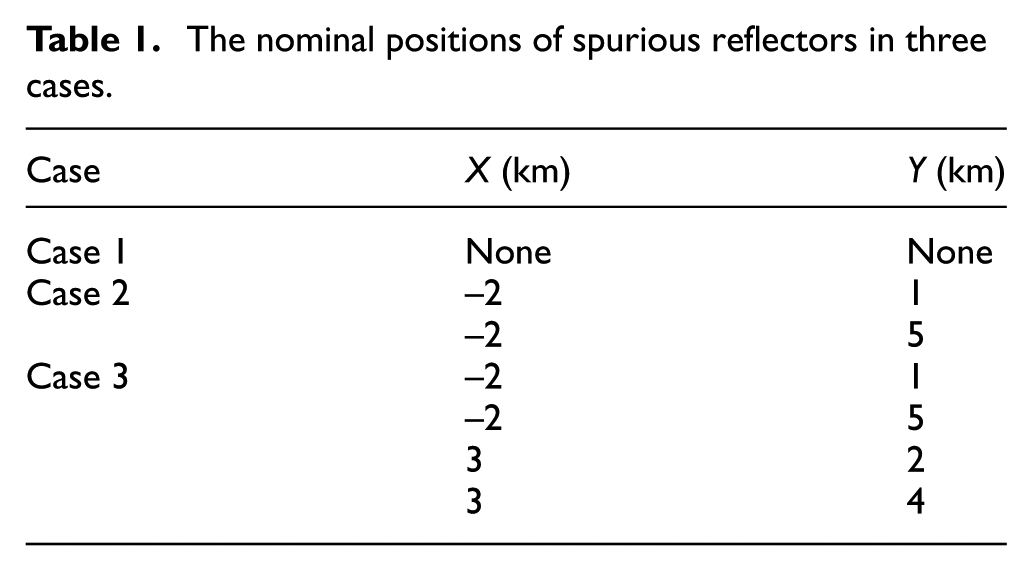

Problem geometry of a single source (pentagram), a true reflector (triangle), and different spurious reflectors (squares) for three cases: (a) case 1, (b) case 2, and (c) case 3.
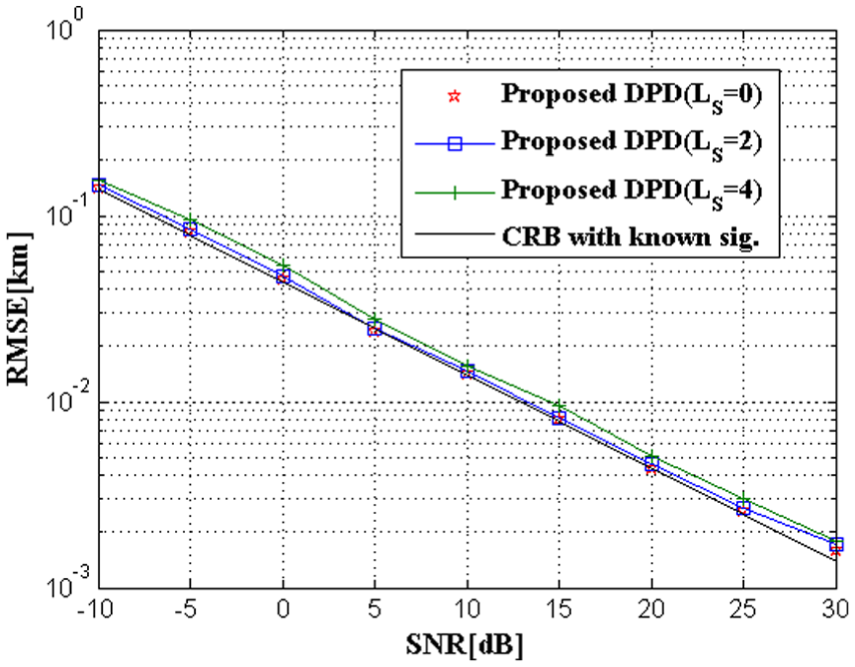
Square root of the CRB and the estimated RMSEs versus SNR in spatially uncorrelated noise for different numbers of spurious paths (LS denotes the number of spurious paths in the legend).
Location accuracy in the presence of small reflector position biases
In this set of experiments, we consider two correlation structures for noise:
The noise is spatially uncorrelated with covariance matrix
The noise is spatially correlated with exponentially decaying correlations among the elements,
14
and the element of

To make our results as comprehensive as possible, we employ the following estimators for a comparison with the proposed DPD algorithm:
The two-step processing estimator—The DOA and TOA estimation using the expectation–maximization algorithm 21 with known waveforms, and the least squares (LS) location with the DOA and TOA estimates used as data. The corresponding plot of the results is labeled by “Two-step with known sig.”
The DPD algorithm with unknown signal waveforms, 13 for which the plot of the results is labeled by “DPD with unknown sig.”
The DPD algorithm for a single transmitter with known signal waveform, 3 for which the plot is labeled by “DPD with known sig.”
For the two-step processing estimator, the ideal data association is assumed as this task is not easy in practice. 22 Without the a priori true paths, the LS location in the second step performs exceedingly poorly, whereas the DPD algorithm avoids this problem. In the remaining part, we shall assume that there is no spurious path. The curves of the CRB and the theoretical RMSE without accounting for the reflector position biases are also displayed. The latter provides a benchmark for the localization accuracy when the reflector positions are assumed accurate but in fact have small biases.
First, the case of a single transmitter is considered and the geometry for the layout is the same as that of case 1 in the preceding experiment. In the spatially uncorrelated and correlated noise environments, we compare the RMSE of our algorithm with those of the three prescribed positioning algorithms as SNR increases. As illustrated in Figure 4, our algorithm holds the lowest RMSE, followed by the DPD with known signal, 3 whereas the DPD with unknown signal 13 exhibits the worst performance. Notice that the performance advantage of the proposed algorithm becomes increasingly prominent as SNR increases. As reflector position biases are present, other algorithms exhibit irreducible location errors at high SNRs. When SNR equals 30 dB, the improvement gain of the proposed estimator is more than 20 dB compared with the DPD with known signal in uncorrelated noise, whereas this improvement gain reaches almost 30 dB in correlated noise. Moreover, the theoretical RMSE without accounting for reflector position biases and the simulated RMSE of the DPD with known signal match very well in regard to spatially uncorrelated noise, thereby verifying the theoretical result (see equation (69)). For spatially correlated noise, the DPD with known signal has deteriorated severely, but the performance of the proposed algorithm approaches the CRB with insignificant differences. This demonstrates the robustness of the proposed algorithm to unknown colored noise.
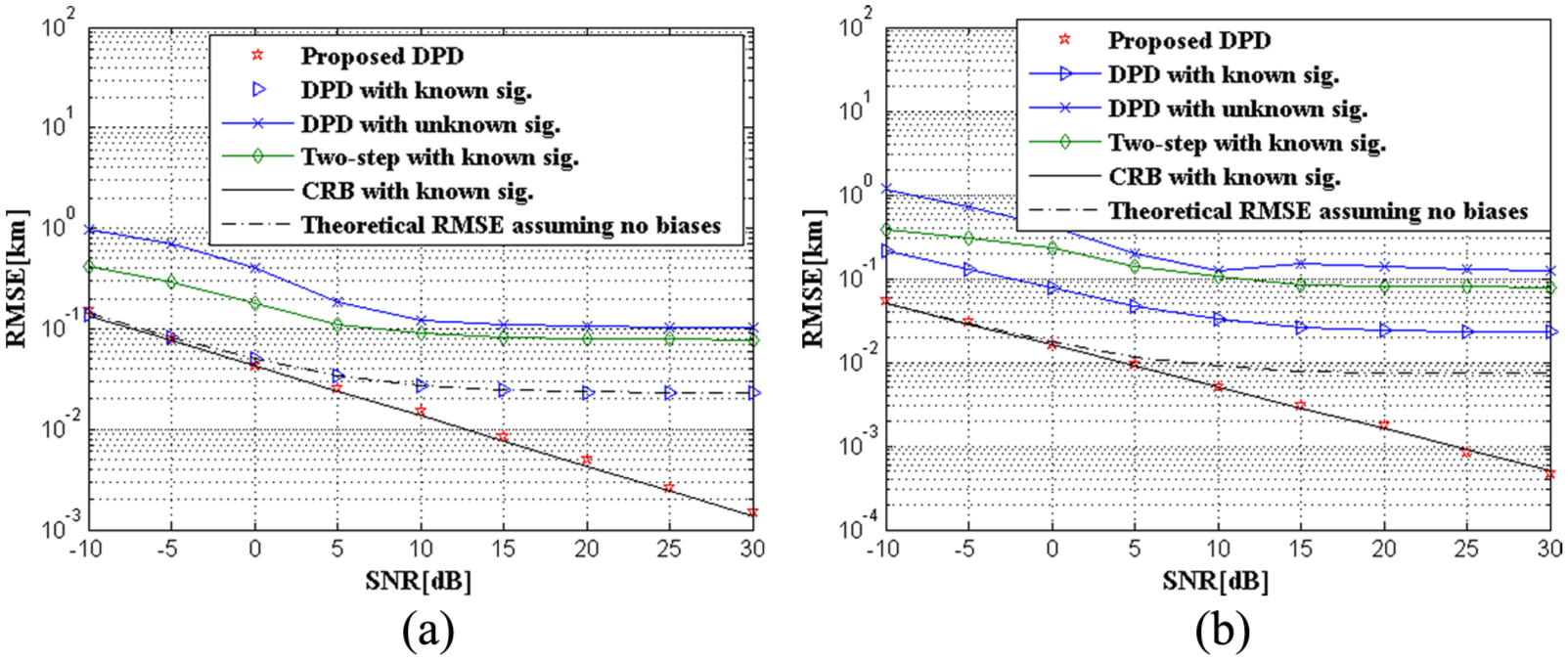
Square root of the CRB, the estimated RMSEs, and the theoretical RMSE without accounting for reflector position biases versus SNR (Q = 1): (a) in spatially uncorrelated noise and (b) in spatially correlated noise.
Next, we examine the performance of the proposed algorithm for multiple transmitters. Without loss of generality, two transmitters placed at

Problem geometry of two sources and a single true reflector.

Square root of the CRB, the estimated RMSEs, and the theoretical RMSE without accounting for reflector position biases versus SNR in spatially uncorrelated noise (Q = 2): (a) source 1 and (b) source 2.
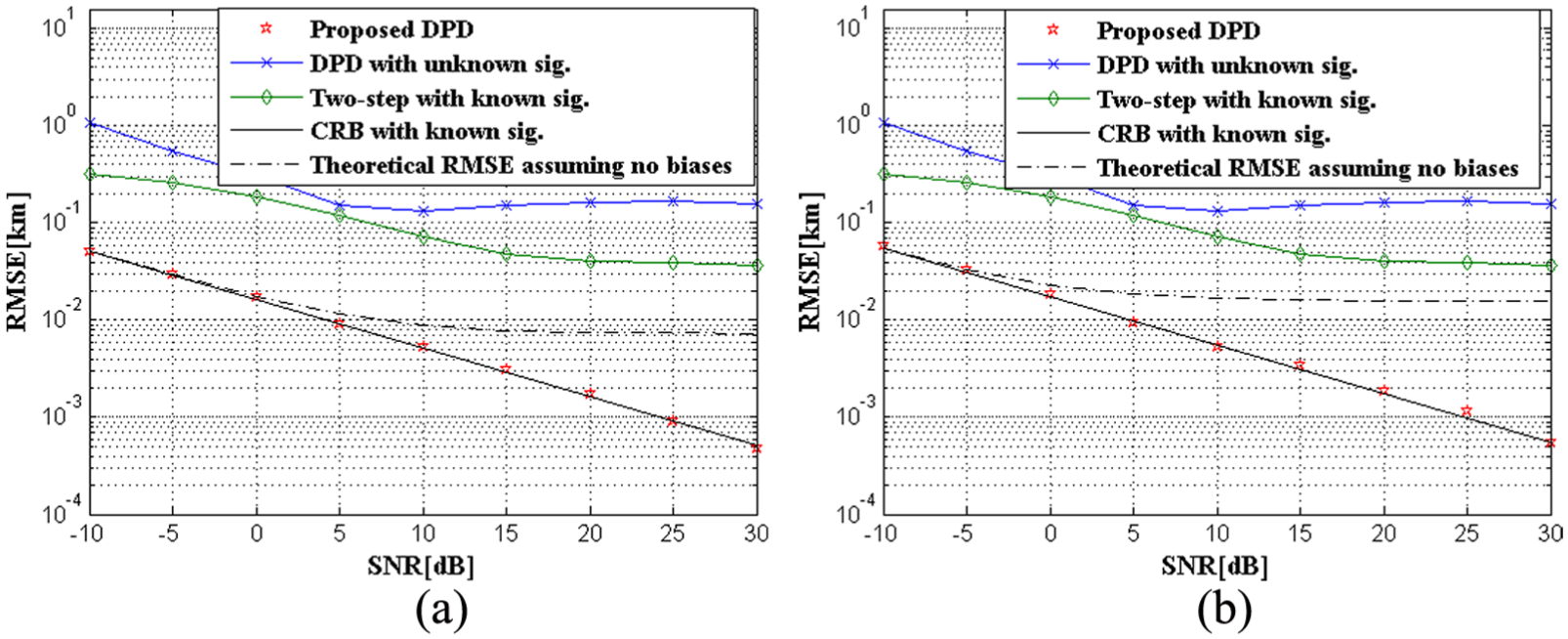
Square root of the CRB, the estimated RMSEs, and the theoretical RMSE without accounting for reflector position biases versus SNR in spatially correlated noise (Q = 2): (a) source 1 and (b) source 2.
From Figures 4, 6, and 7, the theoretical RMSE without accounting for reflector position biases overlaps with the simulated RMSE of the proposed algorithm at low SNRs. However, the gap between them widens as SNR increases, where the effect of the reflector position biases becomes more critical. This is consistent with the analysis in the previous section. Compared with the CRB (or the simulated RMSE of the proposed algorithm), the increases in the theoretical RMSE without accounting for reflector position biases are more than 20 dB for each source location at SNR = 30 dB. Furthermore, it can be seen that our algorithm is considerably superior to the DPD with unknown signals throughout the whole range of SNR. In explanation, the extra information contained in the waveforms is helpful in enhancing the position estimation.
Location accuracy in the presence of larger reflector position biases
The preceding results demonstrate the superiority of the proposed DPD in the presence of small reflector position biases. We now come to study its performance when this small-bias assumption is not satisfied. In this set of experiments, the problem geometry is the same as that presented in Figure 5, and the reflector position biases are expressed as

where

Square root of the CRB and the estimated RMSEs versus the bias level in spatially uncorrelated noise (Q = 2): (a) source 1 and (b) source 2.
Conclusion
This study proposed a reflector-aided direct geolocation algorithm of multiple sources received by an observer array. Practical scenarios were taken into consideration, where the nominal positions of reflectors are available but the small reflector position biases exist, and the correlation structure of noise is unknown. The algorithm is computationally efficient in that (1) it avoids the estimation of intermediate parameters, the dimension of which increases with multipath number, and (2) it decouples the locations of the multiple sources into several lower dimensional optimization problems with the information of uncorrelated waveforms. In addition to this algorithm, we derived a compact CRB formula for source positions and the MSE of the WLS-based estimator without accounting for the reflector position biases. The MSE result indicates that inaccurate knowledge of the reflector positions leads to a decrease in source location accuracy. With extensive numerical examples, we showed that the proposed algorithm is not sensitive to over-modeling as it removes spurious paths intuitively. The performance superiority of our algorithm was demonstrated in spatially uncorrelated and correlated noise environments when the reflector position biases are small. However, we found that large biases in the reflector positions generate large errors in the proposed estimator. To deal with this problem, one possible direction for future work is to develop a Bayesian approach given the prior knowledge of the statistical properties (e.g. probability distribution) of the biases.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Handling Editor: Miguel Ardid
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant 61201381 and grant 61401513, China Postdoctoral Science Foundation under grant 2016M592989, the Outstanding Youth Foundation of Information Engineering University under grant 2016603201, and the Self-Topic Foundation of Information Engineering University under grant 2016600701.