
Abstract
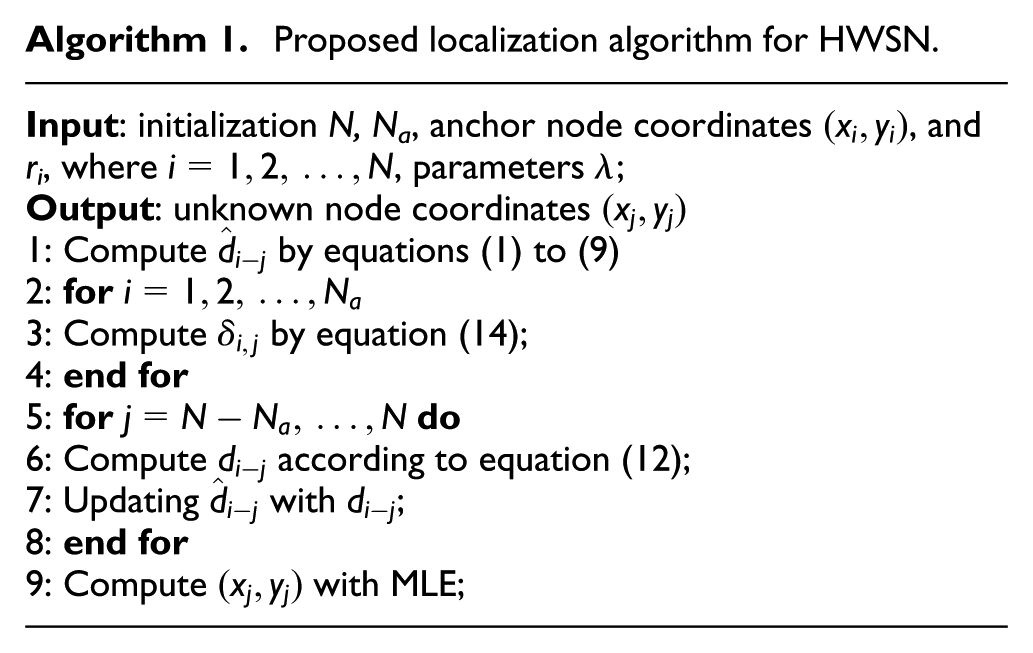
In this article, a novel range-free localization algorithm is proposed based on the modified expected hop progress for heterogeneous wireless sensor networks where all nodes’ communication ranges are different. First, we construct the new cumulative distribution function expression of expected hop progress to reduce the computational complexity. Then, the elliptical distance correction method is used to improve the accuracy of the estimation distance and simultaneously decrease overhead. Finally, using the modified distance, the coordinate of the unknown node can be obtained by maximum likelihood estimation. Compared with other algorithms for heterogeneous wireless sensor network, the proposed algorithm is superior in the localization accuracy and efficiency when used in random and uniform placement of nodes.
Keywords
Introduction
Wireless sensor network (WSN) comprises many sensors randomly/spatially distributed over a certain area with the purpose of monitoring a spatial physical phenomenon, tracking and locating mobile targets.1–4 WSN has attracted keen attentions in various applications due to their densely distributed, self-adaption, lost-cost, and possibly heterogeneous sensors. Some researchers have made in-depth researches on WSN and have applied some new methods such as neural network, Laplacian eigenmap, and Bayesian method to solve the problems existing in WSNs.5–7
According to the way of information processing, the WSN can be divided into the distributed algorithm and centralized algorithm. With the purpose of monitoring and controlling, the algorithm data should be collected and processed in the data center. Therefore, most of the centralized algorithms with high precision are used. However, the centralized algorithm has the disadvantage of large calculation quantity. 8 In the distributed algorithm, signal processing is advantageous in terms of scalability to sensor networks, so this article mainly studies the distributed WSN.9,10
The localization information of sensor nodes is very critical to the performance of WSN. In recent years, a wide variety of localization methods have been proposed, according to the diverse application requirements which can be roughly divided into two types: range based and range free, based on whether or not the network needs to measure the actual distances between nodes. Range-based algorithms, such as the received signal strength indication (RSSI), 11 time difference of arrival (TDOA), 12 and angle of arrival (AOA) 13 , exploit the measurements of angle and distance. Then, the location of the unknown nodes (UNs) can be calculated by the trilateral measurement method and triangulation method. Therefore, it needs extra hardware supporting, large computing, and communicating with high costs. The range-free algorithms are based on hop count information to estimate the distance between anchor nodes (ANs) and UNs without any extra hardware supporting. It includes distance vector hop (DV-Hop), 14 Amorphous, 15 localization using expected hop progress (LAEP), 16 and so on. However, most existing range-free algorithms are based on the unrealistic assumption that all nodes have the same communication radius, that is, WSN is homogeneous. In fact, heterogeneity problem of WSN commonly exists in practical application since sensors are designed using various technologies to achieve different tasks, and their sensing as well as communication capabilities are commonly different. Thus, the approaches, which assume the same communication capability throughout the network, make the localization accuracy poor in heterogeneous wireless sensor networks (HWSNs) and are unsuitable for such networks. The expected hop progress (EHP) algorithm for the HWSN localization is proposed. 17 The algorithm depends not only on the communication radius of ANs but also on the communication radius of intermediate nodes (INs) using those radii that are closer to a real Euclidean distance generated by any two selected nodes. However, its conditional cumulative distribution function (CDF) has high computing complexity. To solve the problem, Assaf et al. 18 presented a modified EHP algorithm by redefining new CDF. This approach achieves satisfactory localization results and shows remarkable communication performance for HWSN, but compared with the original EHP, the algorithm has additional overhead and energy consumption because it needs some training before redefining CDF. To the best of our knowledge, there are very few sufficient and efficacious algorithms in HWSN localization. However, to further improve the estimation distance or localization accuracy, researchers have proposed various correction methods such as residual correction method, weighted least squares (WLS), and weighted centroid method. However, these correction methods either increase computations due to multiple iterations such as Assaf et al.17,19 or assume that all nodes have the same communication radius. Therefore, up to now, no method can obtain the satisfying localization results for HWSN.
To solve those problems, in this article, by defining CDF as Poisson distribution and an elliptical distance, a novel range-free localization algorithm is proposed based on EHP for HWSN where all nodes’ communication ranges are different. First, we assume that the degree of irregularity (DOI) of the communication radius is equal to zero, that is, transmission coverage of each node is circular. And there is no path loss in the communication process. Then, the new CDF is defined as Poisson distribution to reduce the computational complexity. Finally, we propose an elliptical distance correction method to calculate the distance between nodes and use maximum likelihood estimation (MLE) method to compute the UN location information without increasing overhead.
The remainder of this article is organized as follows: In section “Network model,” we elaborate the localization model of HWSN in the two-dimensional (2D) space and introduce hop progress model for different communication ranges and node densities. Section “The proposed algorithm” describes the proposed localization algorithm and distance correction method in HWSN. Experimental results analysis is given in section “Experimental results and analysis.” We finally conclude this article in section “Conclusion.”
Network model
Figure 1 illustrates the HWSN scenario of N sensor nodes randomly and uniformly deployed in a 2D square area S = L × L, where all sensors are of the different communication radius. It is also assumed that a few special sensors commonly known as ANs, which are marked with red asterisks, are aware of their positions. UNs marked with red circles are oblivious to this information and need to obtain their positions by ANs. The link between any two nodes represents one hop, which is able to reach or communicate with other sensors. Clearly, partial connectivity among sensors is present, and distance estimates between unknown sensors and anchors might be multiple hops.

Heterogeneous wireless sensor network model.
In a multihop range-based HWSN localization, the goal is to estimate the location of all unknown sensors using sensors with known locations and partial information of the distances between some pair of sensors. 20 To keep the generality, we suppose that the i-th AN broadcasts data packet containing its position and communication radius in a densely distributed HWSN. Then, the j-th UN receives the data packet through multihop communication. For the sake of simplicity, we exploit the shortest path method to obtain the distance between sensor nodes as di-j ≈ di-k + dk-j, where di-k (dk-j) denotes the distance between ANs (INs) and INs (UNs). Unlike previous homogeneous algorithms, the hop distance of IN possesses huge discrepancy due to the different sensor communication radii, as shown in Figure 2. It makes the distance estimation far from actual distance. To solve this problem, the minimum mean square error (MMSE) distance estimation method is given as follows

where km denotes m-th IN. E(di−k1
),

where H is the minimum number of hops between ANs and UNs.

Multihop communication.
If we consider that UNs have the capacity to receive the information from ANs for distance estimation, then each unknown sensor would estimate its own location using distance estimates and absolute positions to at least three anchors by MLE method.
Notations are as follows: i, k, and j indicate ANs, INs, and UNs, respectively. Similarly, ri, rk, and rj correspond to their communication radius, respectively. N, Na, and Nu represent the number of all nodes, ANs, and UNs, respectively. λ is node density. area(i, ri) is the i-th node’s coverage area having the i-th sensor as a center and ri as a circle of radius.
The proposed algorithm
Equation (2) shows that in order to obtain the estimate distance, four distance formulae need to be derived, that is, first-hop distance
For the sake of clarity, this article is only to discuss the two-hop distance, in what follows, we denote by X, Y, and Z the random variables that represent
First-hop and intermediate-hop distance derivation
As can be seen from Figure 3,

where


EHP analysis.
And, the probability of

where

Exploiting some geometrical properties and trigonometric transformations, A is given by

where
where
Last-hop distance derivation
By definition, equation (8) only applies to first-hop distance

where Y is considered as a distributed random variable on
In a densely distributed HWSN, the shortest multihop path is likely to exist for any pair of the sensors. The
Ellipse correction scheme
Traditional distance correction methods utilize mostly weighted distance, which cannot be directly applied to heterogeneous networks. To alleviate the above-mentioned problem, we note that localization accuracy is mainly dependent on two key points: (1) distance computing between ANs and UNs and (2) sensor node location estimation method, such as trilateration, triangulation, and MLE. Position correction method has been proposed via exploiting residual correction method in Assaf and colleagues,17,18,21 which greatly increases the computational complexity because of iteration computations. To avoid the excessive iterations, enlightened by Sivanageswararao et al. 22 and Golestanian and Poellabauer, 23 we propose a novel distance correction method, which can adapt to the heterogeneous nature of WSNs without adding any overhead, based on elliptic properties.
As shown in Figure 2, multihop paths between i-th AN and j-th UN have links with different lengths. The shape of multihop paths is similar to ellipse. Hence, we present the possible multihop paths between the nodes in the shape of ellipses with a large diameter of 2a and a small diameter of 2b, as illustrated in Figure 4. 23 Ellipse perimeter formula, by conventional approximation, can be written as follows

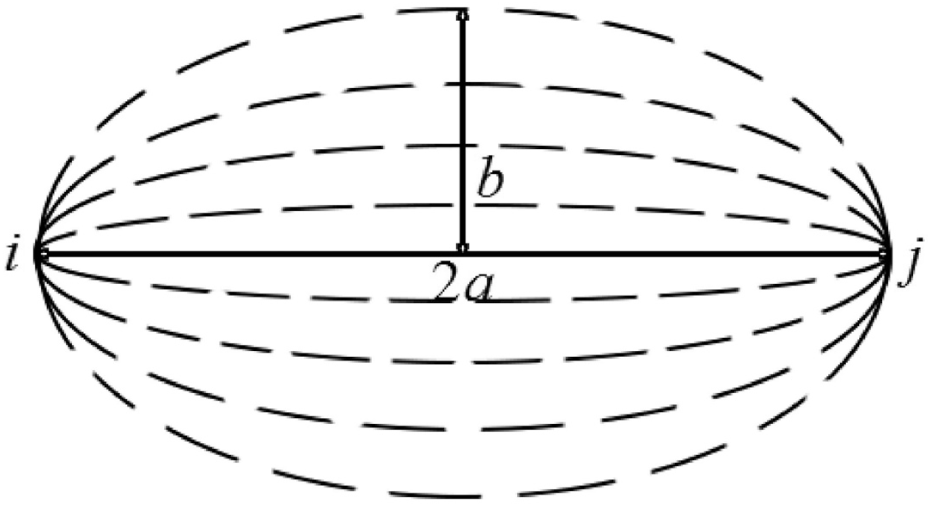
Modeling the multihop path with a set of ellipses.
The purpose of distance correction is to obtain the straight-line distance from node i to node j, that is, elliptical major axis. Thus, equation (10) can be seen as follows

where 2a is elliptical major axis,

Unfortunately, we have only knowledge of the path length

in which

In equation (14),
Experimental results and analysis
In this section, to validate the performance of the proposed method, we will mainly compare our results with the results of Amorphous, 15 DV-Hop, 14 and LAEP, 16 in which their parameters are tuned for the sake of contrast under the same condition, as shown in Table 1. In the simulation, sensor nodes randomly and uniformly deployed in a 2D square area S = 100 × 100 m2. We assume that the number of anchors Na is set to 20, and that the number of all nodes N is set to 100, 200,…, 500, 600. We always assume that the transmission capabilities of all nodes (i.e. the communication radius of the ANs ri and the communication radius of the UNs rj) are set between 6 and 30 m, except in Figure 8. And ri and rj are uniformly distributed random numbers in the range of [6, 30]. In order to make the comparison more convincing, all experimental results are obtained by averaging over 200 trials. Note that the central processing unit (CPU) times were obtained by running the MATLAB code on a DELL computer with Intel(R) Core (TM) i7-6700 CPU, 3.40 GHz, 16.0 GB RAM, with MATLAB 2014(a) on Windows 10 (64-bit operating system) in all our experiments.
Simulation parameters.

Evaluation metrics definitions
In this article, we propose the evaluating indicator of localization algorithms, that is, mean distance error (MDE), distance estimation error (DER), and normalized root mean square error (NRMSE) defined by


and

where
Transmission model
In this article, the DOI transmission model is used, and the specific formula is as follows

where

where DOI is the maximum path loss percentage variation per unit degree change in the direction of radio propagation. DOI model becomes the regular model (RM) when DOI equals zero. And the specific formula is as follows

All the experimental results are obtained on the premise that DOI equals to zero, that is, transmission coverage of each node is circular.
Comparing with classical methods
Figure 5 depicts the localization MDE achieved by Amorphous, DV-Hop, LAEP, and the proposed algorithm for different node densities. As seen from Figure 5, the proposed algorithm can adapt to low or high node density due to complying with the heterogeneous nature of the WSN. The performance of the proposed correction algorithm is optimal compared to others, especially for low node density.

Relationship between MDE and node density for different localization methods in HWSN.
The comparison of DER distribution for different localization methods in HWSN is shown in Figure 6. Figure 6 shows that the distribution of the proposed-correction algorithm’s DER is 0.73 in the interval of 0.2. And the other algorithms (including the proposed algorithm, LAEP, DV-Hop and Amorphous) are 0.71, 0.62, 0.59 and 0.28 respectively. Meanwhile, the proposed algorithm improves slightly by means of its modified algorithm. This further demonstrates the superiority of the proposed algorithm. A comparison between the results from Figures 5 and 6 indicates that the proposed algorithm is more suitable for HWSN.

Distribution of DER for different localization methods in HWSN.
The simulation results shown in Figure 7 illustrate that the positioning error decreases as node density increases. This is mainly because the accuracy of the hop distance estimation is improved with the increase in node density. Specifically, the line chart of the proposed algorithm shows a major decline, and then a slow downtrend when node density is greater than 0.03. And the positioning error of the proposed algorithm is less than LAEP under various node densities. Furthermore, the proposed modified algorithm obviously improves the performance of the proposed algorithm and its accuracy and, therefore, provides a better adaptability of nodes–density–variety, especially for sparse networks.

NRMSE versus node density in HWSN.
To confirm the feasibility of the proposed algorithm, we also made some experiments, mainly on the variety in the communication radius and the number of ANs. Figure 8 shows the NRMSE of five algorithms under the condition that the communication radius of UNs ranges from 6 to 30 m, the transmission capability of ANs is set to 22 m, and the remaining initial conditions remain unchanged. Figure 9 plots the localization NRMSE versus number of ANs in HWSN. As seen from Figure 9, the positioning error reduces as the number of ANs increases. A comparison of the results from Figures 7 to 9 indicates that it is important to reasonably determine the communication radius of ANs for improving the location accuracy.

NRMSE versus node density in semi-heterogeneous WSN.

NRMSE versus number of ANs in HWSN.
Generally, the result of MATLAB simulation proves the feasibility of the proposed algorithm. The proposed algorithm not only has less error than other algorithms in dense HWSN but also can be utilized in a sparsely distributed HWSN. Moreover, its correction algorithm is proposed to solve the constraint of low node density.
Conclusion
In this article, a novel range-free localization algorithm is proposed for the HWSN. Furthermore, a distance correction mechanism which complies with the heterogeneous nature of WSNs is developed to improve localization accuracy without incurring additional costs. Our algorithm, whether applied with or without correction, outperforms the state-of-the-art range-free ones in terms of localization accuracy and adaptability to HWSN.
Footnotes
Handling Editor: Shuai Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (no. 61472278).