
Abstract
The rapid development of Internet of Things applications, along with the limitations of cloud computing due mainly to the far distance between Internet of Thing devices and cloud-based platform, has promoted a newly distributed computing platform based on collaboration between cloud computing and fog computing. Fog computing helps to reduce transmission latency and monetary cost for cloud resources, while cloud computing helps to fulfill the increasing demands of large-scale compute-intensive offloading applications. In this article, we study the tradeoff issue between the makespan and cloud cost when scheduling large-scale applications in such a platform. We propose a scheduling algorithm called Cost-Makespan aware Scheduling heuristic whose major objective is to achieve the balance between the performance of application execution and the mandatory cost for the use of cloud resources. Additionally, an efficient task reassignment strategy based on the critical path of the directed acyclic graph modeling the applications is also proposed to refine the output schedules of the Cost-Makespan aware Scheduling algorithm to satisfy the user-defined deadline constraints or quality of service of the system. We also verify our proposal by extensive simulations, and the experimental results show that our scheduling approach is more cost-effective and achieves better performance compared to others.
Introduction
Recently, the Internet of Things (IoT) is one of the major revolutions in information and communication technology (ICT). The IoT and its associated technologies, such as machine-to-machine (M2M) technology, extend the Internet connectivity beyond traditional smart devices like smartphones, tablets to a diverse range of devices, and everyday things (e.g. objects, machines, vehicles, buildings) to perform a variety of services and applications (e.g. health care, medicine treatment, traffic control, energy management, vehicular networking). These connected devices are generating an unprecedented amount of data, which needs to be stored, processed, and analyzed for deriving valuable insights as well as properly accessed by end users and/or client applications. Together with it, the quantity and the scale of services and applications are increasing rapidly, which may require processing capabilities beyond what could be offered by the most powerful smart devices. Meanwhile, cloud computing, in which dynamically scalable and often virtualized resources are provided as a service over the Internet, may offer a significant complement to IoT. The intrinsic limitations of lightweight smart devices (e.g. battery life, processing power, storage capacity, network resources) can be alleviated by offloading compute-intensive, resource-consuming tasks up to a powerful computing platform in the cloud, leaving only simple jobs to the capacity-limited smart devices.
However, when IoT meets cloud, many challenges arise. According to Information Handling Services (IHS) Markit company, the IoT market will grow from an installed base of 15.4 billion devices in 2015 to 30.7 billion devices in 2020 and 75.4 billion in 2025. 1 With the predicted explosion in the number of connected devices, traditional centralized cloud-based architectures, in which computing and storage resources are concentrated in a few large data centers, will not be able to handle the IoT’s data and communication needs anymore. It is mainly caused by the far distance between the cloud and IoT devices. The transmission of huge amount of data or service requests from IoT devices to the cloud over the Internet will not only pose heavy burden to network performance and network bandwidth but also result in unbearable transmission latency and degraded quality of service (QoS) to end users. Moreover, persistent connectivity to the cloud may not always be available for IoT devices or simply too expensive, especially in 3G network. 2 On the other hand, thanks to the advances in hardware and software technology, many network edge devices and even user terminals (e.g. routers, gateways, workstations, PC) are getting more and more powerful in terms of processing, storage, and communication capabilities. These resources are not always utilized by their owners. It results in recent attempts to push the cloud computing capabilities to the network edge.
Fog computing, 3 which was first proposed by Cisco, represents a new paradigm for cloud computing which can transform the network edge into a distributed computing infrastructure for IoT applications. The idea of fog computing is to extend the cloud to be closer to the things that produce and act on IoT data; hence, fog computing is usually referred as “cloud to the ground.” Instead of forcing all processing to the cloud, fog computing aims to process part of the applications’ workload locally on network edge devices or end-user clients, which are called fog servers or fog nodes. These fog nodes are deployed at the edge of networks (e.g. park, bus terminal, shopping center) to pre-store cloud data and serve as a near-end computing proxies between the front-end IoT devices and the back-end cloud servers. Putting resources at the edge of networks only one or two hops from the data sources allows fog nodes to perform low latency processing while latency-tolerant and large-scale tasks can still be efficiently processed by the cloud. On the other hand, the benefit of scalability and on-demand services in the cloud can help the fog to fulfill the increasing demands of large-scale compute-intensive offloading applications if the resources of fog computing are not sufficient. From this point of view, fog computing is not aimed to replace cloud computing, but to complement it in a new computing paradigm, cloud–fog computing.4–7
In practice, many offloading applications are composed of multiple modules performing different tasks. These tasks can be either independent of each other or mutually dependent. 8 In the former case, all tasks can be offloaded simultaneously and processed in parallel. In the latter case, however, the application is made up of tasks that need input from some other tasks and parallel offloading may not be applicable. The latter application is usually modeled as a workflow, which is represented by a directed acyclic graph (DAG), where the set of vertices represents different tasks in the application and the set of edges specifies their precedence constraints. An example of DAG-based application is complex event processing (CEP) which is an emerging big data analytics technique for the IoT. CEP-based systems interpret input data as event streams and accept a user-defined analytics workflow composed of CEP queries (tasks) that need to be performed on these streams in order to derive semantically enriched “complex” event from a series of simpler events.9,10 With the growing prevalence of cloud–fog computing system, it is inevitable that such DAG-based applications will be naturally distributed and embedded in an environment with numerous connected computing devices with heterogeneous capabilities. As streaming data travel from its point of origin (e.g. sensors) toward cloud platform, it passes through many devices from the network edge to the cloud, each of which is a potential target of computation offloading. The main challenge lies in scheduling application tasks in a pool of processing nodes in cloud and fog environment considering inter-task dependencies to optimize some predefined objective. Previously, many scheduling algorithms were proposed for heterogeneous computing, whose main objective is to minimize the execution time of tasks, without worrying about monetary charges of using computing resources.11–14 However, with the advent of cloud computing, in which part of the application execution is outsourced to the computing resources of different cloud providers (CPs) and cloud customers (CCs) are charged based on the number of virtual machines (VMs) and hours of usage, some recent efforts have been made to reduce the cost of using cloud service.15–22 A task schedule, which can minimize the completion time of the workflow but corresponds to a large amount of monetary cost, is not an optimal solution for CCs.
In this article, we consider task scheduling in a newly distributed computing platform based on collaboration between cloud computing and fog computing for executing large-scale offloading DAG-based applications. Specifically, the computing platform is originated from the infrastructure of fog nodes (e.g. routers, gateways, workstations, IP video cameras) at the premise of CCs and extended by the virtualized hosts (cloud nodes) provided as services in cloud computing. We then propose a novel application scheduling heuristic, Cost-Makespan aware Scheduling (CMaS) algorithm to solve the scheduling problem in this platform. Besides overall efficiency, our proposal also takes into account network condition in the cloud-fog environment and monetary cost charged to CCs. Thus, the major objective of the CMaS algorithm is to achieve a good tradeoff between the application execution time and the cost for the use of cloud resources. Moreover, we present a task reassignment strategy which is responsible for refining the output schedules of the CMaS algorithm to satisfy the user-defined deadline constraints, hence improve the QoS of the system. Our approach is experimentally evaluated and compared with some existing ones. The results prove that our method can guarantee QoS and has better cost-effectiveness than other approaches.
The remainder of the article is organized as follows. In section “Related work,” we introduce some related works to the task scheduling problem that have been studied so far. In section “Motivation scenario,” we give a motivation scenario, where our proposal model can be practical to cloud–fog collaboration for task scheduling. Then system architecture is described in section “System architecture.” In section “Problem model and solution,” we detail the problem formulation and present our proposed method. Then we describe some experimental results in section “Implementation and analysis,” followed by our conclusions and suggestions for future work in section “Conclusion.”
Related work
There have been various studies that attempt to solve task scheduling problem in heterogeneous computing systems, where the sequence of tasks (workflow) is popularly presented by a DAG.11–14 Because DAG task scheduling is an non-deterministic polynomial-time complete (NP-complete) problem, 11 it is expected to be solved by heuristic algorithms for finding approximate optimal solutions. The heterogeneous earliest finish time (HEFT) 12 algorithm is the most popular and widely used algorithm. The HEFT includes two main phases: a task prioritizing phase for computing the priorities of all tasks based on upward rank value and a processor selection phase for selecting the task with the highest upward rank value at each step and assigning the selected task to the processor which minimizes the task’s finish time. Arabnejad and Barbosa 13 introduce predict earliest finish time (PEFT), in which task priority and processor selection are based on an optimistic cost table (OCT) representing for each pair (task, processor) the minimum processing time of the longest path from the current task to the exit node. Meanwhile, Wang et al. 14 propose two innovative policies, entry task duplication selection policy and idle time slots (ITS) insertion-based optimizing policy in order to improve the efficiency of the scheduling algorithm. However, these algorithms for heterogeneous systems intend to minimize makespan and do not look attentively at the problem of dispatching large tasks in a cloud setting or consider monetary cost of using computing resources.
The emerging of cloud computing motivates the extensive studies on the cost and performance-aware application scheduling models.15–22 For example, Li et al. 16 present a cost-conscious scheduling heuristic, called CCSH, which is an extension of the HEFT algorithm. In this method, the effect of the monetary cost for the use of cloud services is represented by the input cost-conscious factor which is used as a weight to calculate the earliest finish time (EFT) of each task. Panda and Jana 17 propose a method combining cloud min–min scheduling (CMMS) 18 and profit based task scheduling (PBTS) to minimize makespan and cost simultaneously and maximize the average utilization of cloud resources. However, the constraints of customers on QoS or budget are aborted in these approaches. Meanwhile, some works address deadline-constrained task scheduling on the cloud. Den Bossche et al. 20 address task scheduling problem in a hybrid cloud model, which is built from a private cloud and multiple public clouds. The authors introduce a cost-efficient approach to determine the most appropriate infrastructure (public or private cloud) to execute the incoming applications. Decisions are based on the ability to meet the deadline requirement of each application as well as the cost-savings. However, in this work, each workflow is processed on either the public cloud or the private cloud, which is different from our framework where tasks of the workflow can be dispersed on both VMs of CPs and fog nodes at the local system of CCs. Chopra and Singh 21 propose a deadline and cost-based scheduling heuristic in hybrid cloud, in which subdeadline is assigned to each task in workflow application and migrate the tasks to public cloud when deadline is not met at private cloud. However, the tradeoff between the cost and schedule length is not properly addressed in this work.
Fog computing, characterized by extending cloud computing to the edge of network, has recently received considerable attention. The seed contribution on fog computing is the one presented by Bonomi et al., 3 in which the authors provide insights related to the main requirements and characteristics of fog computing and highlight the importance of cloud–fog interplay and the role of fog computing in the context of IoT. Based on the collaboration between cloud and fog computing, Alsaffar et al. 23 present an architecture of IoT service delegation and resource allocation, in which user requests can be efficiently managed and delegated to appropriate cloud or fog based on linearized decision tree which considers tree conditions (service size, completion time, and VM capacity). Souza and collegues24,25 address QoS-aware service allocation problem in a combined cloud–fog architecture consisting a dual-layer fog aiming to diminish the cloud access delay in IoT scenarios. Meanwhile, Deng et al. 7 investigate the tradeoff between power consumption and delay in a cloud–fog computing system. Simulation and numerical results from this work demonstrate that the fog can significantly complement the cloud with much-reduced communication latency. It results in a reduced revenue loss associated with the wide area network (WAN) and network bandwidth cost for a CP. Hence, the problem of minimizing the operational cost of cloud data centers with the help of fog devices has received much attention from researchers.26,27 Besides, there are some early works that try to deal with task scheduling problem regarding fog computing. Zeng et al. 28 target at minimizing the task completion time while providing a better user experience by designing an efficient resource management strategy in a fog computing supported software-defined embedded system. Meanwhile, Nan et al. 29 consider a three-tier cloud of things (CoT) system and design an adaptive decision-making algorithm called unit-slot optimization for distributing the incoming data to the corresponding tiers that can provide cost-effective processing while guaranteeing average response time. However, these works consider bag of independent tasks or unpredictable batch workloads instead of workflow.
To the best of our knowledge, DAG-based workflow scheduling problem does not seem to be studied so far in the context of cloud–fog. Our work serves as a starting point to determine an optimal schedule for large-scale compute-intensive applications based on the collaboration between cloud and fog computing. The main contribution of this work is the development of a heuristic algorithm to achieve a good tradeoff between the application time and the cost for the use of cloud resources under user-defined deadline constraints. For ease of understanding, we present an overview of common scheduling approaches along with ours in Table 1.
Existing scheduling approaches and ours.

Motivation scenario
As fog computing is gaining more popularity, extending cloud computing, and services to the edge of network, we can envision some situations where IoT devices can benefit from using fog computing environment. The following scenario (Figure 1) exemplifies the utilization of a collaborated cloud and fog computing in optimizing task scheduling.

Motivation scenario.
An human resources manager of a company is organizing a meeting for the report on his employees’ behavior statistic. In order to get insightful information from the report, the manager uses his Google glass with built-in camera to take pictures from the presentation slide and then sends them to the cloud to extract and analyze user activity patterns. The achieved data are used to analyze value information, for example, site traffic, Internet access time, issues of interest, work achievements, on an hourly, daily, weekly, or even yearly basis. These patterns are utilized to develop intrusion detection expert system, performance evaluation program, or other recommendation systems.
Although the glass can be connected to the Internet and use search engine to find information, its bandwidth is too limited for many captured pictures to be uploaded. Fortunately, the glass is preconfigured to be connected with the company’s fog nodes in the local network, which own much faster CPU speed, larger RAMs, bigger storage, and especially better Internet connectivity. It is clearly reasonable to let the glass transfer those photos to these fog nodes and rely on them to upload to some cloud services for further processing and looking up for the related information. Since the records of user behavior statistic, which are collected on a daily basis and stored as logs on the cloud, can be up to several hundreds of GBs, it would take long time and be costly to look up some specific data as well as to process them. One of the ways to address this is by splitting the log into smaller chunks, which are then processed in parallel by both a new network made up of the company’s fog nodes and cloud VMs. It not only speeds up processing time but also reduces the cost of using cloud resources because it is costly if using solely cloud resources. Eventually, the processed data will be collected at a fog node acting as a broker, where they are combined and forwarded to the user device. With this so-called cloud–fog collaboration, the manager can achieve his desired information in shorter time than the time he could have spent if using only his Google glass.
The above scenario is one of the potential examples, where our proposed model can be applied to utilize the joint work between cloud computing and fog computing. Such collaboration promisingly increases the chance of using resources efficiently. By utilizing multiple fog nodes’ relay to enhance the data processing and distribution from cloud networks, lightweight smart device can overcome its computing and network limitation. In this article, we aim at designing a network architecture, based on the collaboration between cloud and fog computing, attempting to solve the following issue: minimizing the makespan of large-scale compute-intensive applications to satisfy QoS requirement in a highly distributed platform of cloud–fog computing while considering the network contention and cloud cost.
System architecture
In our framework, we assume that fog computing system located at the premise of CCs has the role as a service provider (fog provider) to provide the services of application processing to a specific number of IoT device users. Our system architecture has three layers in a hierarchy network as represented in Figure 2.

System architecture.
The bottommost layer consists of user IoT devices, which can be smartphones, tablets, wearable devices, thin-client, smart home appliances, wireless sensor nodes, and so on. They send requests to the upper layers for application execution.
The middle layer represents fog computing environment. The primary components of this layer are intelligent fog devices (e.g. routers, gateways, switches, access points) that have the capability of computing, networking, and storage. They are called fog nodes, which are deployed in the vicinity of end users to receive and process part of a workload of users’ requests with the local short-distance high-rate connection. Also, they are connected to the cloud so as to benefit from a massive pool of redundant resources of the cloud on demand.
The uppermost layer represents cloud computing environment, which hosts a number of heterogeneous cloud nodes or VMs of different cloud service providers. The cloud nodes provide outsourced resources to execute the workload dispatched from the fog layer.
In the fog layer, there is a fog device acting as a resource management and task scheduler component, which is called fog broker. The broker (1) receives all requests of users; (2) manages available resources on the cloud and fog nodes (e.g. processing capacity, network bandwidth) as well as processing and communication costs together with results of data query returned from nodes; and (3) accordingly creates the most appropriate schedule for an input workflow to decide which part of the workflow will run on which resources. The major components of fog broker are described in detail as follows.
Application receiver is the component that is responsible for providing a user interface for application submission. Each application reaching to fog broker is specified by all of the relevant parameters and information such as the number of tasks, the workload of each task, the amount of input data, which are stored into the application database.
Next data query requires application receiver for all information about the input data of the latest application and then creates the database queries to all data storages under the management of fog broker to find the necessary amount of data distributed in the computing infrastructure. From the returned querying results, the locations of all input data are disclosed and available for the following application scheduling phase.
Resource collector is responsible for collecting and managing information about the execution rates and data transfer rates of all processing nodes or the billing policy of CPs and storing it in resource database. Data in the resource database are updated frequently along with the resource supplementation or removal on the computing infrastructure as well as the changes in the billing policy of each CP. This guarantees that the final application schedule produced by fog broker is appropriate with the latest updates on the computing resources of CCs and therefore achieves the higher accuracy.
Based on the profiles about processing capacity and network bandwidth of all computing nodes as well as monetary costs for using cloud resources together with results of data query returned from nodes, the application scheduler analyzes the application, finds the best schedule and then transfers the output schedule to task dispatcher, which in turn dispatches the tasks of each application and sufficient parameters and information to the appropriate computing nodes (cloud or fog).
Problem model and solution
Task scheduling on a target system that has network topology is defined as the problem of allocating the tasks of an application to a set of processors with various processing capabilities so as to minimize the makespan of the schedule. Thus, the input of task scheduling involves a task graph and a processor graph, and the output is a schedule representing the assignment of a processor to each task as shown in Figure 3. In this section, we explain how to formulate the problem and then propose a task scheduling method to solve the mentioned problem.

Illustration of task scheduling problem.
Problem model
Task graph
A task graph is represented by a DAG,
We assume that a task cannot begin its execution until all of its inputs have been gathered sufficiently. The input of a task is not only from the preceding tasks but also from other data sources (i.e. data storages) on both cloud and fog infrastructure and only determined after completing the execution of the preceding tasks. Each task appears only once in the schedule.
Processor graph
A processor graph
We assume that due to physical constraints on networking devices, the processing rate of fog nodes is often smaller than that of cloud nodes, which are high-performance VMs in cloud data center. In addition, fog nodes are located in the local system, due to the higher stability of local area network (LAN) than WAN, the bandwidth between processors in fog environment is higher than that of cloud environment.
Proposed method
Given a task graph
Task prioritizing phase
In this phase, tasks are ordered by their scheduling priorities that are based on upward ranking.
12
Basically, the upward rank of a task

where


with
Finally, we sort all tasks by nonincreasing order of priority level, which provides a topological order of all tasks and thus preserves the precedence constraints between two specific tasks.
Node selection phase
A task

where
Suppose task

where
The ready time of task

Let
Condition 1
Let

For the found interval


Besides, the algorithm also considers the monetary cost that the CCs are charged for the use of cloud resources such as computing processors, network resources, storage, and memory. The computing infrastructure is composed of fog nodes at the premise of CCs and extended by the cloud nodes provided as services in cloud computing. Hence, let

In equation (10), each cost is calculated as follows.
Processing cost is expressed as

where
Let

We next compute the cost of using the memory of node

where
Let

From this cost, we can define a utility function which computes the tradeoff between the cost and EFT as follows

Then, the task
The CMaS algorithm is presented in Algorithm 1.

Deadline-based task reassignment phase
For the application scheduling problems in real world, the user-defined deadline is important information to improve the QoS performance of the system. In other words, when a user submits an application request to the application scheduler, which is represented by fog broker in our work, the output schedule must guarantee that the application execution does not finish later than a predefined deadline. To limit the deadline violation, the fog broker in the fog computing layer needs to control the output schedules after the node selection phase so that the application execution can meet the user-defined deadline with the possibly lowest amount of the monetary cost for cloud resources. Thus, we present a strategy in Algorithm 2, namely deadline-based task reassignment algorithm, to improve the completion time of application execution as deadline constraints. The major idea of this strategy is that the makespan of a schedule is significantly influenced by the total execution time of tasks on the critical path of an application graph. 31 The critical path refers to the longest execution path between the entry task and the exit task of the application and the tasks on this path is called critical tasks.

In our algorithm, the improvement on the makespan of a schedule can be found by reassigning the critical tasks to better processing nodes which can reduce the completion time of each critical task (lines 11–23). For this reason, we distribute evenly the distance between the overall deadline and the makespan of the current schedule (i.e. the AFT value of the exit task) to each critical task (line 10), which has not been reassigned yet, to find the subdeadline, that is, the expected AFT, for that task (line 12). The processing nodes which guarantee that the EFT value of a critical task is not greater than task’s subdeadline are considered as the candidate nodes to which this task should be assigned (line 14). Based on the list of the candidate nodes, the node selection for task execution still relies on the maximum value of the utility function
In practical terms, it is very difficult or impossible for any scheduling algorithm to produce the application schedules which can meet all tight deadlines. Therefore, the major objective of task reassignment phase is to raise schedules which can either meet the deadline constraints or minimize the difference between the overall makespan and the deadline in case of very tight deadline. Specifically, the task reassignment phase will be carried on until the deadline is satisfied (
Implementation and analysis
This section presents experiments that analyze many aspects of our approach via numerical simulations. First, to justify the efficiency of the proposed CMaS algorithm, we have also designed several other task scheduling algorithms to compare their performances in terms of schedule length, monetary cost, and tradeoff level. The compared methods include the Greedy for Cost (GfC), which is to minimize workflow execution cost by assigning each task to the most cost-saving processing node; the well-known HEFT, 12 which attempts to schedule interdependent tasks at minimum execution time on a heterogeneous environment; and the CCSH, 16 which deliberates both the EFT of tasks and the cloud cost paid by CCs. Then we evaluate the effectiveness of the proposed task reassignment strategy on controlling the application execution so as to meet QoS requirement as well as cost-savings. These scheduling algorithms are applied into the application scheduler component of fog broker, respectively.
Experimental settings
The experimental setup for our model’s evaluation is shown in Table 2. The simulations are developed in Java with JDK-8u112-x64 and Netbeans-8.0.1 using CloudSim, 32 which is a framework for modeling and simulation of cloud computing infrastructures and services. In our simulation, we use MIPS (million instructions per second) to represent the processing capacity of processors.
Simulation setup.
Our first experiment covers a random task graph
Characteristics of the cloud and fog environment.

MIPS: million instructions per second.
Cost of using cloud resources.

Note that in our experiment, we generate 10 random DAGs with different edges and node weights for each task graph size. Then we run each method to schedule these task graphs and calculate the average schedule length and the average monetary cost for the changing number of tasks. The error bars in the following figures indicate 95% confidence interval.
Evaluation of CMaS algorithm
Figure 4 shows that in terms of schedule length, GfC algorithm gets the worst case, HEFT algorithm obtains the best result while CCSH and CMaS are in the middle. Specifically, our method is 5.53% better than CCSH. And compared with GfC, our method even achieves a far better performance, about 32.64%.

Schedule length comparison.
However, regarding the monetary cost for cloud resources (as illustrated in Figure 5), it has been observed that although HEFT provides the best performance, it has the highest cost while the opposite is true for GfC algorithm. In the meantime, our solution conduces to the benefits of balance between schedule length and cloud cost. Compared with HEFT algorithm, our method can save 30.17% of cloud cost while performance reduction is not more than 23%. Also, compared with CCSH algorithm, our method can save 5.06% of cloud cost, which means that our method has a slight economic advantage together with its effectiveness.

Cost comparison.
The reason behind these results is as follows. The main objective of HEFT algorithm is to minimize the makespan of application execution without taking into account the cost paid for cloud resources. To reduce the makespan, HEFT assigns more tasks to cloud nodes with better processing capacity; hence, it causes higher monetary cost. On the contrary, GfC algorithm aims to achieve cost-savings by assigning tasks to the cheapest processors with low processing capacity, and hence, it takes longer makespan. Meanwhile, in CCSH algorithm, the effect of the monetary cost for the use of Cloud resources is represented by the input cost-conscious factor
Moreover, in order to demonstrate more clearly that our algorithm can achieve better tradeoff between the makespan and the cost of task execution than other methods, we base on a comparison criteria called cost-makespan tradeoff (CMT) 33 to determine the best algorithm at each task graph size as follows

where
Figure 6 shows the superiority of CMaS algorithm at all task graph sizes. We can see that our method is stable and achieve the highest CMT values compared with the others. Specifically, the average CMT value of our method on all task graph sizes is better than GfC by 16.33%, CCSH by 10.21%, and HEFT by 14.75%. Among other scheduling methods, GfC algorithm gives better result than HEFT and CCSH at small task graph size. However, as the number of tasks increases, the performance of HEFT and CCSH is getting better. CCSH algorithm has a slightly better tradeoff level than HEFT since it takes into account both makespan and cloud cost.

Cost-makespan tradeoff (CMT) comparison.
In next experiment, we evaluate the impact of increasing number of cloud nodes on the schedule length and the cloud cost only in CMaS algorithm with a fixed number of tasks. Similar to the previous experiment, the number of processing nodes (i.e. cloud and fog) in the computing infrastructure is fixed at 40. However, we change the number of cloud nodes from 5 to 25 to generate different simulated models of the computing infrastructure. The experimental results shown in Figures 7 and 8 indicate that the present of more cloud nodes, which provide better processing capacity as well as larger amount of available input data for task execution than fog nodes, results in better system performance but higher monetary cost for cloud resources. It is highly noticeable that the schedule length reduces 41.10%, but the cloud cost raises 59.89% as the number of cloud nodes increases from 15 to 20. In general, the results of this experiment can be considered as the basis to determine the appropriate number of cloud nodes and fog nodes in the computing infrastructure so as to satisfy deadline constraint or budget constraint of the application scheduling problem.
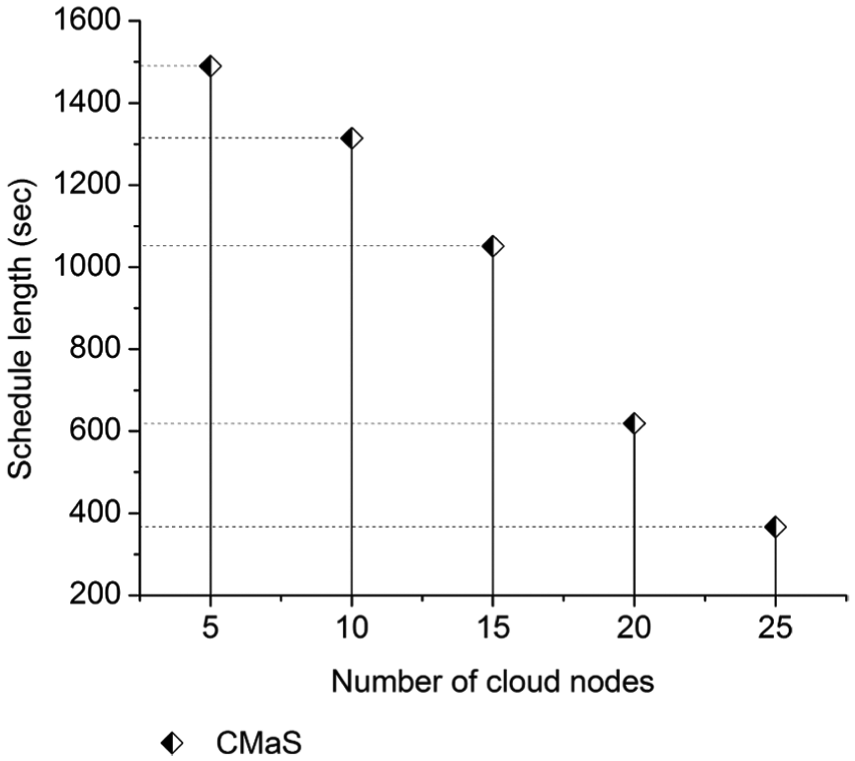
Impact of number of cloud nodes on schedule length.

Impact of number of cloud nodes on monetary cost.
Evaluation of deadline-based task reassignment
In this experiment, we evaluate the effectiveness of the deadline-based task reassignment algorithm on controlling the application execution to satisfy the user required QoS. We will specify the deadline constraints on two real-world applications, Gaussian Elimination (GE) program
34
and Epigenomics in biology.
35
The structures of these real application graphs are known. The GE program is characterized by the parameter
In order to evaluate the effect of the task reassignment on deadline constraints, we use HEFT algorithm which can provide the best makespan compared to others as baseline algorithm. Specifically, the application schedule length provided by the HEFT algorithm, denoted by

where i is the corresponding algorithm, that is, CMaS or deadline-based CMaS.
In addition, we also evaluate the impact of the task reassignment as user-defined deadline on the monetary cost for the use of cloud resources. As mentioned earlier, compared to the HEFT algorithm, our CMaS algorithm can gain an amount of cost-savings. The OverHEFT Cost Ratio (OCR) is computed by

where i is the corresponding algorithm, that is, CMaS or deadline-based CMaS.
Figure 9 clearly shows the advantage of the deadline-based task reassignment algorithm. It can be seen that the CMaS algorithm can satisfy loose deadline in most cases; however, it cannot guarantee the application execution finishes before tight deadline. Meanwhile, tight deadline can be satisfied after the task reassignment phase refines the output schedule from the CMaS scheduling algorithm to a better performance in terms of makespan. Specifically, the deadline-based CMaS can guarantee the finish of the application execution before the predefined tight deadline when it is deployed on the small, medium, and large size of the mentioned applications, except for the GE program with the matrix size of 30 or 464 tasks. Note that the adaptability with tight deadline has a decreasing trend along with the increase on the scale of the applications. In particular, for the GE program, when the size of the matrix increases, the OMR value of deadline-based CMaS gradually rises. To explain, the effect of the critical path on the schedule length of an application may decrease corresponding to the increasing number of tasks of an application. However, in general, by comparing the application makespan of CMaS before and after the reassignment phase, we observe that the deployment of the task reassignment phase is actually efficient to make the completion time of application execution meet or significantly closer to the required deadline. Therefore, the probability of deadline violation is reduced to a reasonable level.

Impact of deadline-based task reassignment on makespan: (a) OverHEFT Makespan Ratio for Gaussian Elimination and (b) OverHEFT Makespan Ratio for Epigenomics.
Figure 10 shows another benefit of the deadline-based CMaS. It can be observed that our CMaS algorithm demands much smaller monetary cost of cloud resources than HEFT algorithm. After the task reassignment phase, the cloud cost becomes higher as more cloud resources are utilized to produce better schedule. However, the cloud cost of the deadline-based CMaS is still handled not to exceed that of the HEFT algorithm (i.e.
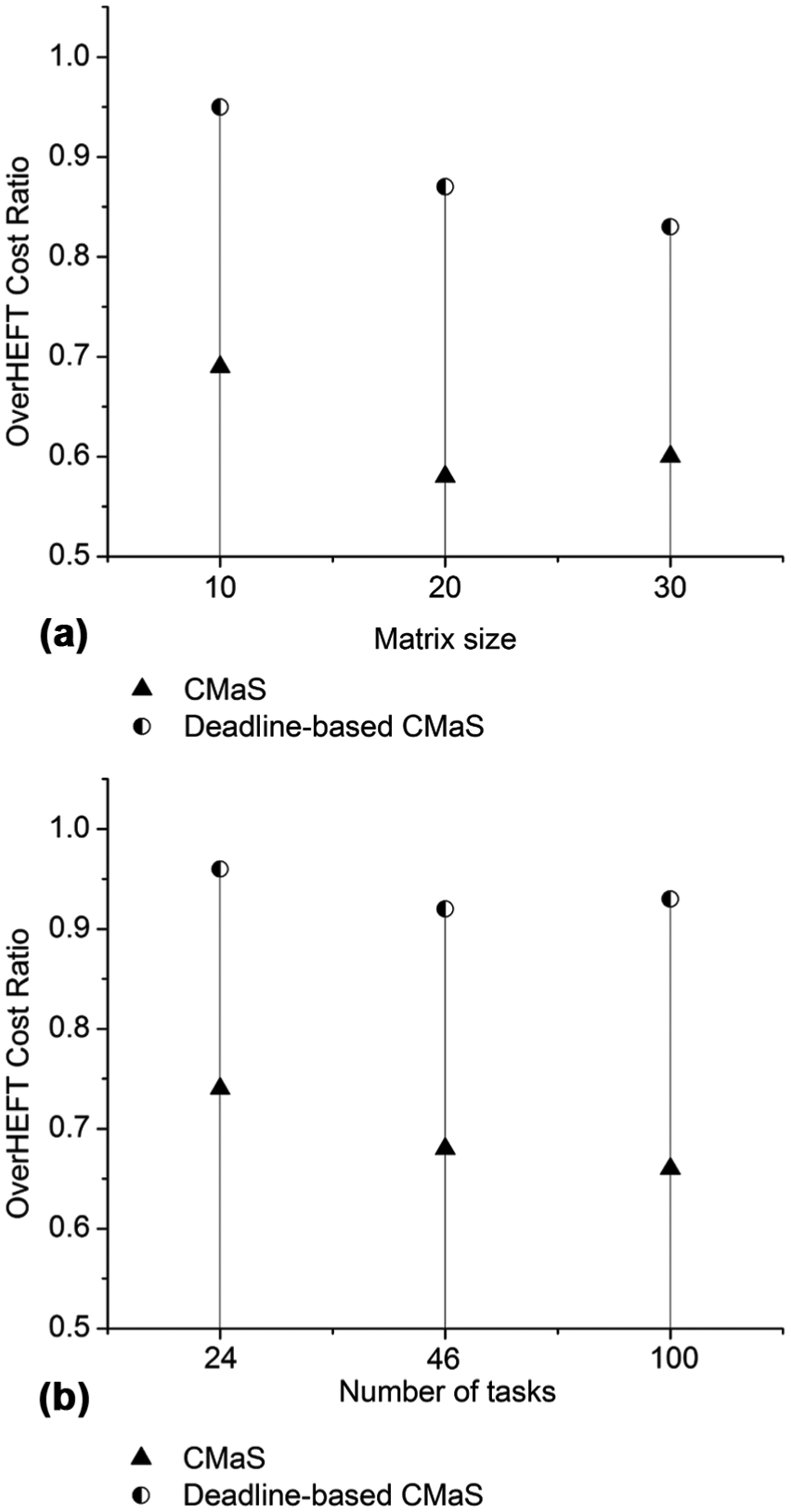
Impact of deadline-based task reassignment on cloud cost: (a) OverHEFT Cost Ratio for Gaussian Elimination and (b) OverHEFT Cost Ratio for Epigenomics.
Conclusion
The IoT devices along with the demands for services and applications are increasing rapidly on both the quantity and the scale. The combined cloud–fog architecture is a promising model that if well exploited can provide efficient data processing various applications or services, especially those which are compute-intensive. This article addresses task scheduling problem in the effort to provide smart devices with a smooth access to the cloud as well as to achieve a better service quality based on the collaboration between cloud and fog computing. For the sake of reaping the most benefit from such a platform, one must allocate computing tasks strategically at each processing node of cloud or fog layer. We propose the CMaS algorithm considering the tradeoff between performance and cost-savings to build the application schedule, which not only guarantees application execution within deadline constraints but also reduces the mandatory cost for the use of cloud resources. A lot of simulations have been conducted and their results prove that our work can provide a better cost-time-effective solution than other existing methods.
In future work, we intend to deploy our proposal into real-world systems. We see CEP for the IoT as a potential application. 10 CEP is an event processing that deals with the task of processing multiple events with the goal of identifying the meaningful events within the event cloud. We consider an IoT deployment scenario with a user-defined analytics workflow composed of CEP queries (tasks) that need to be performed on multiple event streams generated at the edge (e.g. from IoT devices), and several fog nodes at the premise of CCs and public cloud nodes available to perform the queries. With the planned implementation, we can thoroughly observe the real-world operation, performance and work out any shortcomings to improve our proposal.
On the other hand, green computing is now becoming very important. With the huge volume and ever-increasing service requests, the power consumption of both cloud and fog computing platform is soaring. Therefore, we can extend the proposed scheduling for large-scale applications by also considering energy-efficiency while guaranteeing QoS is still a challenge.
Footnotes
Handling Editor: Eduardo Cerqueira
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the MSIP (Ministry of Science, ICT and Future Planning), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2017-2013-0-00717) supervised by the IITP (Institute for Information & Communications Technology Promotion).