
Abstract
Ensuring cooperative awareness by periodic message beaconing in vehicular environments is necessary to address pedestrian safety. However, high periodic basic safety message broadcasting in dense vehicular environments makes accessing the communication channel very competitive. Furthermore, high-frequency periodic broadcasting causes fast device energy dissipation which is a key issue for small computing devices used in wireless sensor and mobile communications. Therefore, in order to achieve reliable message dissemination for vehicle-to-pedestrian safety, energy loss minimization mechanisms for pedestrian mobile devices should be developed. This article proposes controlling the number of broadcasts by eliminating periodic safety message broadcasts from pedestrian nodes; these nodes only receive broadcasts from vehicles and then conditionally communicate with the vehicles when safety alerts are raised. When the pedestrian nodes do not receive messages from any vehicle for a specified period, pedestrian nodes broadcast a high-priority message advertising their position. Furthermore, for the pedestrian, adaptive message emission rates and transmission duration are proposed based on defined vehicle-to-pedestrian separation distances. This approach reduces the pedestrian device energy consumption and end-to-end delay and improves the packet delivery ratio compared to the vehicular broadcast approach for safety messages defined in the IEEE 802.11 standard.
Introduction
The intelligent transport system (ITS) revolution has given birth to tremendous technologies in the realm of vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications. In the recent past, technologies addressing vehicle-to-pedestrian (V2P) safety communications started taking center stage in both the automotive industry and communications research communities. In 2013, Honda 1 announced its V2P safety technology based on dedicated short range communications (DSRC). It is important to note that DSRC for safety is based on the real-time exchange of basic safety messages (BSMs) between pedestrian devices, vehicles, and relevant roadside infrastructures. However, complying with the efficiency and reliability requirements for BSM delivery in vehicular ad hoc networks (VANETs) presents considerable challenges. The major challenge addressed in this study is the fast energy dissipation caused by periodic beaconing of safety messages leading to a short life span in pedestrian devices.
Pedestrian devices in a V2P communication system are mainly small mobile computing devices that are highly constrained by energy capacity especially when compared to the complete V2V system. This is definitely a threat to the feasibility of V2P safety if energy-consuming processes such as high-frequency periodic transmissions 2 are not carefully dealt with. The BSM application conventionally specifies a transmission interval of 100 ms as defined in the SAE J2735. 3 By this convention, basic safety messaging is a heavy traffic–generating application. 4 Reports in various studies 5 indicate that high-frequency periodic transmissions are one of the major causes for the broadcast storm in VANETs.
Part of the IEEE 802.11 6 standard defines benchmarks for wireless access in vehicular environments (WAVEs). From this point onward in this article, the code IEEE 802.11 shall refer to the “vehicular” part defined in IEEE 802.11. 6 In a typical IEEE 802.11 V2P communication scenario where all pedestrians and vehicles are participating in the periodic transmission of status and warning BSMs, there is a high likelihood of channel congestion when either vehicular or pedestrian density is high. Furthermore, the co-existence of both conditions could grossly impact the communication channel’s availability and the pedestrian devices’ lifetime. In addition to periodic broadcasting as an energy-consuming process, channel congestion may result to packet dropping which negatively affects the packet delivery ratio (PDR). Therefore, the IEEE 802.11-based standard as it is for V2P communications is not very reliable for energy-constrained pedestrian devices, hence a hindrance to achieving V2P safety. Communication methods with minimum energy loss for pedestrian devices need to be orchestrated for V2P safety applications.
The broadcast storm problem in VANETs has been addressed in the literature.7–14 Nowadays, research works2,15–17 addressing energy-efficient communications in V2P safety are attracting attention. However, to the best of the authors’ knowledge, this is the first work focusing on controlling the broadcast storm in a typical V2P safety system while benchmarking on IEEE 802.11. Furthermore, the proposed method minimizes the pedestrian devices’ energy loss without deviating much from the IEEE 802.11 conventional approach.
In this article, a broadcast storm suppression approach that eliminates pedestrian node periodic broadcasts is presented; the pedestrian nodes receive vehicle broadcasts and then conditionally communicate by unicasting to the specific transmitting vehicle when received BSMs are considered a threat to safety. Certain conditions such as signal interference by high vehicles may affect the transmission and delivery of messages to the pedestrian. In such conditions, when the pedestrian nodes do not receive messages from any vehicle for a period of 3 s, the pedestrian node broadcasts a high-priority message advertising its position and direction of motion to the vehicles. This strategy is set up to reduce the safety risk which may arise due to lack of information between the vehicle and the pedestrian as a result of bad channel conditions. Once the pedestrian receives vehicle broadcast messages, pedestrian-to-vehicle (P2V) communication is then based on the distance between the pedestrian and the vehicle. Furthermore, limited defined separation distances are associated with specific data rates and transmission durations from a pedestrian. In other words, the data rates and transmission duration are adaptive based on the V2P distance. The results of the study show that the proposed scheme is effective in low- and high-density vehicular scenarios. The original contributions of this article are summarized as follows:
A broadcast suppression technique characterized by vehicular periodic broadcasting and event-driven pedestrian feedback suitable for energy-efficient P2V safety applications.
A P2V communication method utilizing adaptive emission rates and transmission duration based on pedestrian to vehicle distance.
A numerical analysis of energy consumption based on packet size considering the SAE J27353 BSM specification in both the conventional IEEE 802.11 broadcast and the proposed vehicle broadcast-to-pedestrian (Vbr2P) scheme.
A channel collision analysis for the proposed Vbr2P considering the number of nodes.
A simulation analysis of pedestrian device energy loss, end-to-end delay, and packet delivery ratio, while comparing the conventional IEEE 802.11 and the proposed Vbr2P.
The next sections of this article are organized as follows: section “Related work” discusses the related works. Section “Basic safety applications” presents various BSM applications and energy consumption modeling. Section “Proposed vehicle broadcast to pedestrian scheme” presents the proposed V2P scheme and analysis. Section “Simulation” presents the simulation setup and performance evaluation. Finally, section “Conclusion” concludes this article.
Related work
Broadcast control in VANETs
The major conventional approaches that address the broadcast storm problem are probabilistic flooding, 18 clustering, 7 distance-based forwarding mechanisms,9,10 and adaptive control methods. Compared with the usual mobile ad hoc networks (MANETs), for which there is quite a vast number of proposed solutions, studies for the same problem in VANETs are increasingly becoming more popular in ITS research. Chitra and Satya 5 surveyed several techniques targeting broadcast suppression in VANETs. The survey classifies the broadcast suppression techniques into four categories including simple broadcasting, probabilistic and delay broadcasting, area-based broadcasting, and neighbor knowledge–based broadcasting. To show the state of the art, a few selected approaches from the literature relating to the categories illustrated in Chitra and Satya 5 are reviewed next.
The weighted p-persistence broadcasting algorithm
7
is a probabilistic flooding scheme based on distance. On receiving a packet from node i, node j checks the packet identity and rebroadcasts it with probability

The slotted 1-persistence broadcasting algorithm
7
is also a probabilistic flooding scheme based on distance. On receiving a packet, a node checks the packet identity and rebroadcasts it with probability 1 at the assigned time slot

where

where
The broadcasting protocol with prediction and selective forwarding 8 in VANETs is a distance-based scheme. In the scheme, each node maintains a record of its variance in acceleration and informs all its neighbors. Any sending node in the neighbor-based cluster then selects a forwarder based on the fastest candidate in terms of future mobility in the broadcast direction.
The selective reliable broadcast protocol (SRB) 9 is a cluster-based protocol. To suppress broadcasts, SRB uses the concept of relay nodes, dubbed as cluster heads. Cluster head selection is based on the message rebroadcasting efficiency of a given node. The vehicle inside each cluster furthest from the center is chosen as the cluster head.
A distance-aware broadcasting algorithm 10 where the farthest forwarding station is assigned, the highest forwarding probability was presented. The length of the collision window is manipulated to follow a nonuniform distribution contrary to the standard uniform distribution defined by the IEEE 802.11 enhanced distributed channel access (EDCA) mechanism. The authors argue that fairness in medium access control is not important where critical safety messages must be delivered with minimal delay.
The multi-metric over-head-free routing scheme (MORS) 11 for VANETs is based on probability of reception rates and distance over communication range. In their work, it is underscored that achieving a low end-to-end latency in multi-hop message dissemination schemes comes with a cost of low message delivery rates. Their study, therefore, presents a distributed asymmetrical transmit power adjustment technique to enable message propagation in over two hops and selects the best relay vehicles by estimating the probability of reception rates to meet the required defined safety thresholds. It is worth noting that the scheme uses both a power control–based technique and a multi-hop approach for message dissemination.
The power control–based broadcast scheme 12 is a hop-based transmission protocol. It uses transmit and receives power information available in the packet frames, to adjust the packet retransmission power, thus achieving reliable and faster message dissemination in VANETs. The vehicular multi-hop algorithm for stable clustering (VMaSC) 13 is also a cluster-based protocol. This protocol uses a hybrid architecture, with both IEEE 802.11 and long-term evolution technologies to achieve reliable and faster safety message dissemination. It also uses the concept of cluster heads and members in its IEEE 802.11 network.
Energy loss control approaches in V2P communication
Currently, there are very few studies2,15–17 addressing energy consumption in pedestrian devices for V2P communications which will be discussed in this section. Lee and Kim 15 proposed a hybrid V2P communication approach where pedestrian-to-pedestrian (P2P) communication is based on the Wi-Fi-direct standard and V2P communication is based on IEEE 802.11. They go ahead to present a pedestrian group owner (GO) selection method based on the energy capacity of a node, and a selected node acts as the V2P interface to the rest of the other pedestrian nodes. It is worth noting here that their proposed algorithm may exhibit an undesirable delay due to the aggregation and coordinating activity in the Wi-Fi-direct standard application.
Bagheri et al. 2 proposed a V2P communication approach coupled with cloud-based computing whereby pedestrian nodes share geolocation data to the cloud servers which then give appropriate feedback to the pedestrians. They note that beaconing causes quick energy drainage of the pedestrian batteries; therefore, they proposed an adaptive multi-mode (AMM) approach built on situation-adaptive beaconing. In situation-adaptive beaconing, the cloud server through the AMM approach notifies the pedestrian to change its beaconing rate based on the information it has received from the vehicles in the vicinity of such a pedestrian. Bagheri et al. 17 proposed an adaptive beaconing frequency based on traffic density and considered the use of a cellular-based approach for communication because it allows for cloud-based computing.
Lewandowski et al. 16 proposed a low-power pedestrian protection system (LP3S) based on IEEE 802.15.4. They focused on the provision of a small low energy–consuming pedestrian device which communicates with another device installed in the vehicle. The LP3S has a special protocol design for warnings and alerts both in the vehicle and on the pedestrian end which minimizes false alerts and offers a high probability of conditional meaningful warnings.
The broadcast scheme proposed in this article, referred to as the Vbr2P, allows vehicle nodes to broadcast their information to pedestrians. In return, pedestrian nodes conditionally unicast to the BSM transmitting vehicle at varying data rates and transmission time depending on the V2P separation distance. An analysis of the proposed Vbr2P scheme is performed to evaluate the energy consumption, end-to-end delay, and packet delivery ratio. The Vbr2P scheme is compared with the conventional IEEE 802.11 broadcast approach. Additionally, the self-similar least action walk (SLAW) model 19 is adopted for the first time in VANET simulation literature, to characterize pedestrian mobility. In the next section, an exploration of different BSM kinds and their functionality is made together with an analytical study focusing on energy consumption.
Basic safety applications
The SAE J27353 BSM format is characterized by two parts. The first part (part I) is composed of vehicle position information, the motion direction, the time, and the general status of the vehicle. The content of the first part appears in all periodic BSM broadcasts. The second part (part II) allows additional content to be included in the message. These are basically event-driven messages that the vehicle feels useful. Such events are used to derive alert and warning messages such as the following:
Cooperative collision warning (CCW)—When a vehicle receives location information from surrounding vehicles, it performs a risk analysis on the data. If the result of the analysis results in an expected collision, then a CCW message is broadcasted.
Cooperative forward collision warning (CFC)—CFC is designed to aid the driver in avoiding or mitigating collisions with the rear end of vehicles in the forward path of travel through driver notification or warning of the impending collision. The system does not attempt to control the host vehicle to avoid an impending collision.
Lane change warning (LCW)—This application provides a warning to the driver if an intended lane change may cause a collision with a nearby vehicle. The application receives periodic updates of the position, heading, and speed of surrounding vehicles via V2V communication. When the driver signals a lane change intention, the application uses this communication to predict whether or not there is an adequate gap for a safe lane change based on the position of vehicles in the adjacent lane. If the gap between vehicles in the adjacent lane is not sufficient, the application determines that a safe lane change is not possible and provides a warning to the driver.
Emergency vehicle at scene warning—Emergency vehicle transmits a signal to warn oncoming motorists from either direction that there are emergency vehicles ahead.
Pre-crash sensing—Pre-crash sensing can be used to prepare for imminent, unavoidable collisions. This application could use vehicle infrastructure integration (VII) communication in combination with other sensors to mitigate the severity of a crash. Countermeasures may include pre-tightening of seat belts, airbag pre-arming, front bumper extension, and so on.
Blind spot warning—This application warns the driver when he/she intends to make a lane change and his/her blind spot is occupied by another vehicle. The application receives periodic updates of the position, heading, and speed of surrounding vehicles via V2V communication. When the driver signals a lane change intention, the application determines the presence or absence of other vehicles in his blind spot. If the presence of a vehicle in his blind spot is detected by the application, a warning is provided to the driver. A variation on this is the merge assist where the same processes are used at merge points.
Both part I and the fully embodied part I plus part II messages are discussed in terms of energy consumption once transmitted. The energy consumption for transmitting a message is basically an aggregate of the electronics energy and the signal-amplifying energy. Figure 1 shows a radio transceiver energy consumption model. The transmitting energy consumption is defined in Heinzelman et al. 20 and expressed as

where

where

From equation (6), longer distances and higher message quantities attract higher energy consumption. In the proposed system, the messages transmitted by the pedestrian are event-driven messages. The messages are composed of both part I and part II of the BSM with exception of a worst case when the pedestrian receives no message from a vehicle for some specified time and must send a part I message to broadcast its position. The proposed system is expected to yield a minimized energy consumption due to the message quantity and transmission frequency.
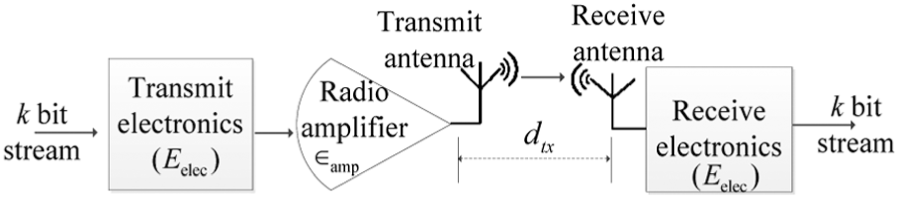
Energy consumption model.
Proposed vehicle broadcast to pedestrian scheme
System model description
Algorithm 1 describes the broadcast dissemination process of Vbr2P, and Figure 2 is an illustration of the Vbr2P concept in a one-dimensional space having vehicle A, vehicle B, vehicle C, vehicle D, and the pedestrian node. Only communications from vehicles that exist in the represented separation ranges


Illustrating the Vbr2P concept in a one-dimensional space.
According to Table 1 as adopted from Gupta et al., 21 the transmission range for the safety warning application is from 50 to 300 m. Therefore, for our performance evaluation, we use the least case scenario of 50 m, and hence, we arbitrarily selected ranges up to a maximum of 50 m.
VANET standard safety applications and specifications adapted from Gupta et al. 21

Based on the IEEE 1609.4 22 multi-channel architecture, safety and control messages must be delivered to the control channel (CCH) during a common time interval. The control channel interval (CCHI) is used for transmission of safety messages, and the service channel interval (SCHI) is used for transmission of infotainment data.
In Figure 3, the Vs and Ps represent vehicles and pedestrian nodes, respectively. In this study, safety message transmission is considered in a continuous channel access mode. The scheduled broadcasts in Figure 3 refer to the periodic safety messages showing position and speed of vehicles which possess only part I of the BSM format. The conditional communication refers to the message with both parts I and II of the BSM format.
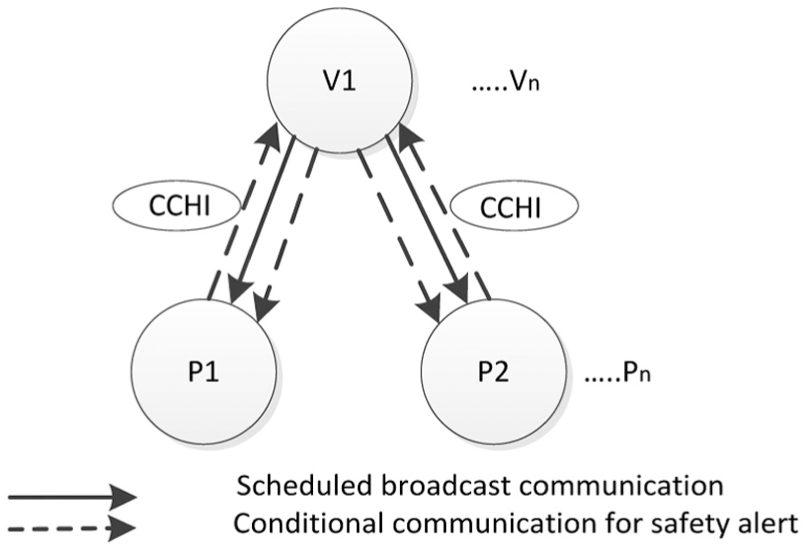
Vehicle broadcast to pedestrian (Vbr2P) communication scheme in a continuous channel access mode based on IEEE 1609.4. 22
Depending on the result of the analysis of the received safety messages at the pedestrian node, if an alert message is invoked, then it implies that the generated message consists of both part I and part II content, which, therefore, must be unicasted to the vehicle whose BSM was received. No other kind of transmission is made from the pedestrian to the vehicles unless the pedestrian node does not receive any message from any vehicle for over 3 s. In such a case, the pedestrian broadcasts only one message advertising its position. This is what is referred to as the pilot message in this study.
Theoretical analysis
In this section, we numerically show how much energy is consumed by the proposed Vbr2P scheme compared to the conventional IEEE 802.11 broadcast mechanism of safety messages.
One of the key parameters used to analyze the total energy consumption based on equation (6) is the number of bits k transmitted during the communication. As explained earlier in this article, the BSM format can be classified as having sizes
Theorem
Assuming that there exist

It is clear here that

In the proposed scheme, for the cars, the total size of

By following the probability concept mentioned earlier in this section, k can be simplified as

By substituting equation (8) into equation (6), the total energy consumption for the IEEE 802.11 transmissions can be found. Similarly, by substituting equation (10) into equation (6), the total energy consumption for the proposed Vbr2p protocol can be analytically found. In our analysis, each vehicle and pedestrian transmits one message which leads to a total message size k for all nodes. The total message size k is calculated on the assumption that all the vehicles and pedestrians have transmitted their packet. Therefore, the time taken for all vehicles and pedestrians to transmit their packets is considered as the time delay to compute k. k is, therefore, described as the total number of participating nodes
Notations.
MAC: media access control.
Observations in Figure 4(a) and (b) show that the proposed scheme provides a lower total message quantity k compared to the conventional IEEE 802.11 transmission mechanism at various pedestrian densities. Therefore, the proposed system is expected to provide a lesser energy consumption as shown in Figure 4(c) and (d). The total message quantity transmitted in the proposed scheme does not show significant variations at different pedestrian densities compared to the conventional IEEE 802.11. Generally, as the number of nodes increases, the total message quantity increases. Despite of the lesser amount in the message quantity generated by the proposed scheme, our simulations that fully considers the transmission channel characteristics shall later show that the PDR achieved in the proposed scheme is better than the legacy IEEE 802.11 method.

(a and b) Message quantities transmitted considering various message alert-invoking separation distances for 50 vehicles/km and 100 vehicles/km and (c and d) total energy consumed considering various message alert-invoking separation distances for 50 vehicles/km and 100 vehicles/km.
It is also important to note at this point that equations (6), (8), and (10) do not consider the effect of contention in the media access control (MAC) layer which leads to backoff and hence would definitely affect the number of transmissions and hence the total message quantity. We can understand the expected amount of contention in a network by finding the collision probability. The collision probability refers to the probability that at least two or more vehicles or pedestrians start transmitting at the same time slot. Based on Carvalho and Garcia-Luna-Aceves, 23 collision probability p can be expressed as

where
The collision probability (11) represents a case for the saturated network given that all nodes equally participate in generating traffic over the channel. This condition matches with the conventional IEEE 802.11 broadcast scenario that is considered in this study. The collision probability of the proposed Vbr2P broadcast scenario can be expressed as

where

Theoretical results for collision probability versus the number of vehicles given (a) 60 pedestrians and (b) 120 pedestrians.
The effect of a collision at the MAC layer is best expressed in terms of the number of transmissions. To this extent, therefore, we formulate an approach to quantize the number of transmissions which are expected after applying the contention effect at the MAC layer on the derived amount of messages to be transmitted. We state that the number of transmissions
Figure 6(a) and (b) shows the results for the expected number of transmissions and the total energy consumed after applying a minimum contention window size of 16 µs. Observations in Figure 6(a) show that the expected number of successful transmissions G does not have a significant variation in each of both the proposed and legacy IEEE 802.11 schemes for various pedestrian densities. However, the proposed scheme shows a slightly lower number of transmissions.

(a) Theoretical results for the expected number of transmissions and (b) total energy consumed considering various node-to-node separation distances, minimum contention window size of 16 µs and 50 vehicles/km.
The closeness of the data indicates that more transmissions are deferred in the legacy system compared to the proposed scheme. This shows that even though the proposed system is an event-driven system, it does not suffer any significant throughput issues. Figure 6(b) shows the energy consumed by each scheme. The proposed scheme provides a lower energy consumption.
End-to-end delay theoretical analysis
In this section, the MAC layer is analyzed for both the proposed scheme and the conventional IEEE 802.11 broadcast method. The end-to-end delay D and collision probability p is considered for analysis. The end-to-end delay refers to the time to send a packet from source to destination for which in the study case is a single-hop scenario. In order to take care of the backoff and freezing time cases during channel access, D is expressed as

where
Based on the exponential backoff mechanism, the contention window CW doubles after each collision until it reaches the maximum

where

where p is the collision probability.
For the conventional broadcast approach, the backoff timer freeze

where
According to Bianchi 25

The

where
The period for a successful data packet transmission

where R is the data rate, e is the packet size, DIFS is the differential interframe space, SIFS is the short interframe space, and ACK is the acknowledgement time out period.
Figure 7 shows the delay encountered analytically. It is observed that the end-to-end delay basically increases when the number of vehicles increases. The interesting phenomenon is that the proposed system exhibits a lower delay compared to the conventional IEEE 802.11 method.
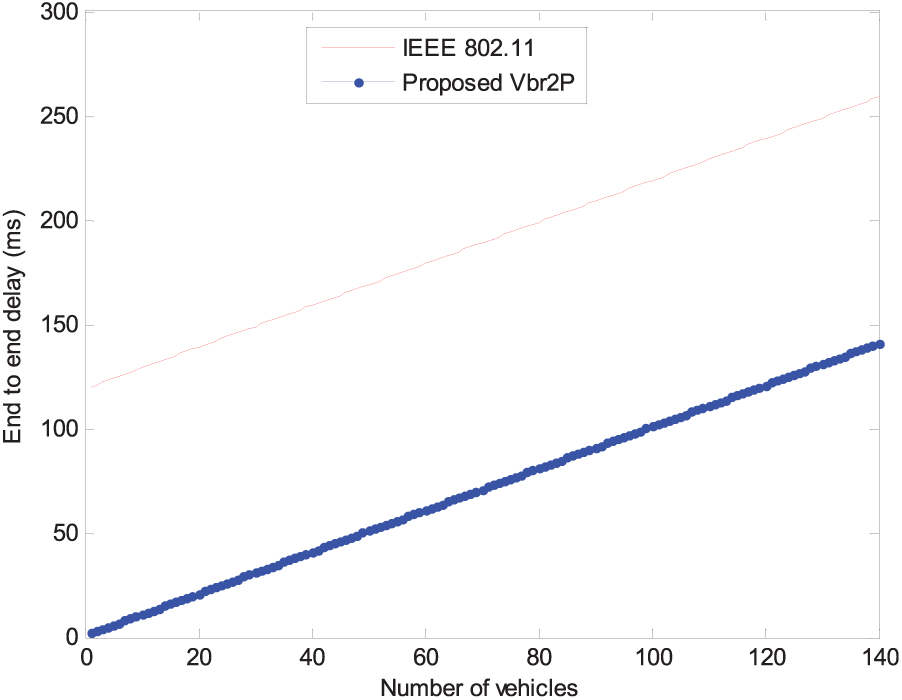
Theoretical result for end-to-end delay considering various numbers of vehicles and 120 pedestrians.
Simulation
Mobility model
Two classes of mobility models are used in this study. These are the vehicle mobility model for vehicle mobility and pedestrian mobility model for pedestrian mobility. Each of them is described next.
Pedestrian mobility
There exist three common fundamental statistical features reported in the literature26–28 about human mobility traces. These include (1) heavy-tail flight and pause-time distributions, (2) heterogeneously bounded mobility areas of individuals, and (3) truncated power-law intercontact times (ICTs). The SLAW model 29 illustrated in Figure 8 unveiled two more statistical features about human walks. These are (1) the destinations of people (waypoints) are dispersed in a self-similar manner and (2) people are more likely to choose a destination closer to the current waypoint. Each statistical feature of human mobility is described below:
Heavy-tail flights and pause-time distributions: This feature shows that each human flight has a heavy-tail distribution. The flight in this case is the Euclidian distance between two waypoints visited by a person. A waypoint is a location along the flight route where the person spends a longer amount of time without moving. The time spent at a waypoint is referred to as the pause time.
Heterogeneously bounded mobility areas: This feature provides a view that different persons have different mobility patterns depending on the area of confinement.
Truncated power-law ICTs: In Lee et al., 29 the distribution of ICTs—that is, the time elapsed between two successive meetings of the same persons—can also be modeled by a truncated power-law distribution, which consists of a power-law head followed by an exponentially decaying tail after a certain characteristic time.
Self-similar waypoints: In human walks, waypoints are considered to be self-similar. This means that different persons are attracted to popular places. Therefore, the destinations and waypoints tend to be heavily clustered. Possible examples of a waypoint include a bust stop and a zebra crossing.
Least-action trip planning (LATP): This feature shows that humans are most likely to visit destinations nearer to their current waypoint when visiting multiple destinations in succession.
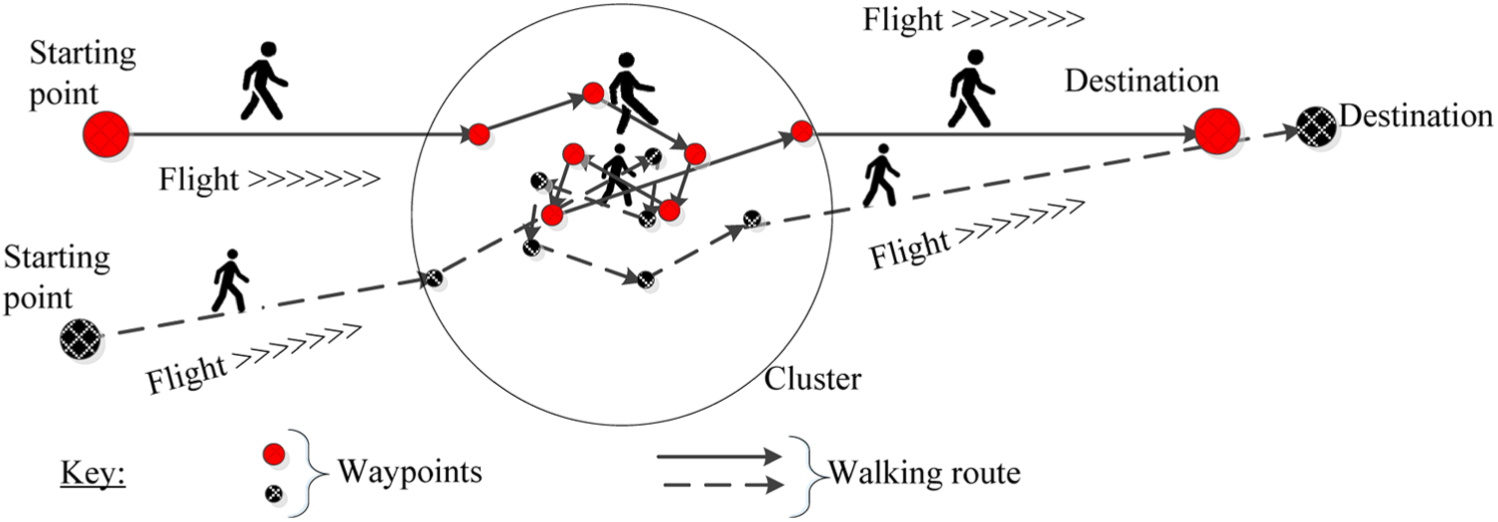
Illustration of the SLAW model for two pedestrians.
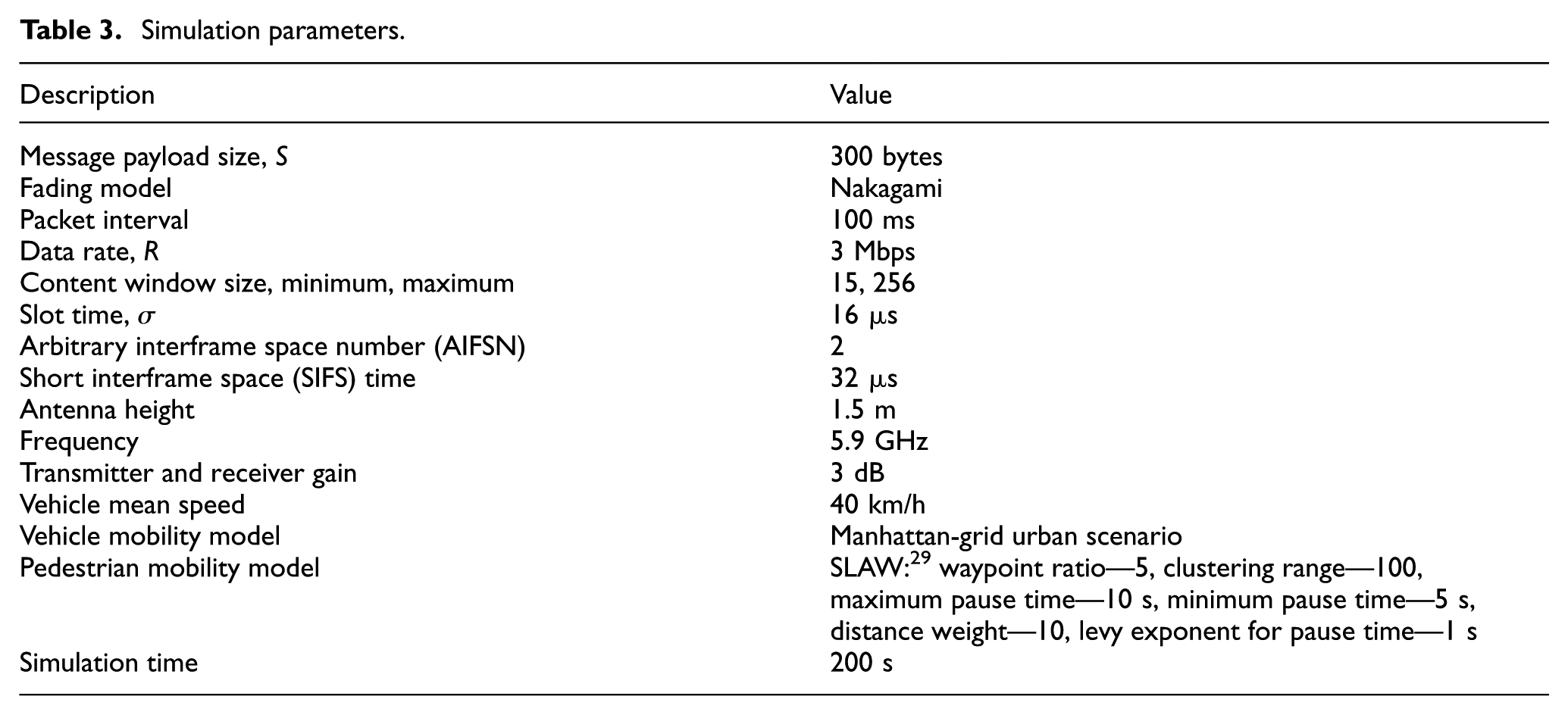
The SLAW model by design exhibits all the mentioned five statistical features of a human walk. Therefore, in this study, we choose to use the SLAW model to aid the generation of the pedestrian mobility trace using BonnMotion-2.1.3. 30 The SLAW model parameters are set as shown in Table 3.
Simulation parameters.
Vehicle mobility model
The Manhattan model is used to emulate the movement pattern of vehicle nodes on streets defined by a map. The map is composed of a number of horizontal and vertical streets. Each street has one lane. The mobile vehicle node moves along the horizontal and vertical grids on the map. At an intersection of a horizontal and a vertical streets, the mobile node can turn left, right, or go straight. This choice is probabilistic. The vehicle turn probability is set to 0.5. We consider a two-dimensional 1500 m by 1500 m fully connected road network in a Manhattan grid with vehicles moving at a mean speed of 40 km/h. The grid offers a total of 6 km for vehicular motion for the single-lane scenario. Our mobility trace for the vehicles is generated using BonnMotion-2.1.3. 30 Figure 9 shows an example of a pedestrian flight generated from the SLAW model and a Manhattan grid used in our simulation experiments.

(a) Sample mobility flight generated using the SLAW human walk model, (b) Manhattan grid for vehicular motion, and (c) a Manhattan and SLAW model mix representing a vehicle and pedestrian mobility model generated by combining (a) and (b).
Performance evaluation
To analyze the performance of Vbr2P, we simulated its system dynamics with the NS-3 simulator, version ns-3-dev. 31 Table 3 summarizes the general simulation parameters and Table 4 defines the simulation performance metrics. The tested density cases in terms of vehicle per kilometer are 16, 25, 58, and 101 while the density cases in terms of pedestrians per kilometer are 5, 7.5, 10, 12.5, 15, 17.5, 20, 22.5, 25, 27.5, and 30. All vehicles and pedestrians transmit power is 20 dB, and the carrier sensing range is varying based on signal fading characterized by the Nakagami loss model and nonline-of-sight conditions. Vehicle nodes can communicate with pedestrian nodes (V2P) and between themselves (V2V).
Simulation performance metrics.

BSM: basic safety message; MAC: media access control.
As earlier mentioned in the proposed system model, the further the range, the lower the emission rate and transmission duration. On the reverse, nearer V2P distances attract higher emission rates and longer transmission duration from the pedestrian. The motivation in this proposed setup is based on the fact that moving cars nearer to a pedestrian are a greater risk to safety compared to vehicles far away. A higher emission rate for high-priority alert messages in short V2P distances generates a great number of message alerts transmitted to the vehicle. Such alerts help draw the driver’s attention and can cause a quicker reaction time in case of an anticipated accident. The Vbr2P configuration in this study is, therefore, set as follows: V2P separation distances between 0 and 20 m attract a pedestrian broadcast of 250-ms transmission interval for a duration of 5 s. V2P separation distances between 20 and 30 m attract a pedestrian broadcast of 500-ms transmission interval for 4 s. V2P separation distances between 30 and 40 m attract a pedestrian broadcast of 800-ms transmission interval for 3 s. V2P separation distances between 40 and 50 m attract a pedestrian broadcast at 1-s transmission interval for 2 s.
From the configuration, the maximum separation distance which triggers P2V communication is 50 m and the lowest 0 m. The justification for this setting is that at 50-m separation range, the vehicle and pedestrian are able to react to the safety messages as the range keeps reducing. The BSM message size is set to 300 bytes since it is to contain state information such as location information, speed, and direction of motion, and when alert events are triggered, the warning message makes an additional 200 bytes.
The initial energy capacity of the battery used in the simulation of pedestrian devices is 12,960 J, which represents a fully charged 3.6-V and 100-mAh mobile phone battery.
Energy loss analysis
Pedestrian energy consumption is a major system design issue for the Vbr2P concept. This is mainly because it can be used for determining the pedestrian’s battery lifetime. As previously mentioned in this article, V2P safety message communication is only reliable when the pedestrian device is always up.
By simulating the proposed Vbr2P and the IEEE 802.11, we show the performance in terms of the pedestrian energy loss at various vehicle densities in Figure 10(a) and (b). Observations in Figure 10(a) indicate that the average energy loss realized by the proposed Vbr2P scheme is much lower than that of the conventional IEEE 802.11 broadcast system. The reason behind this performance is attributed to the nonperiodicity of broadcast transmissions expected from the pedestrian nodes when the proposed system is used.
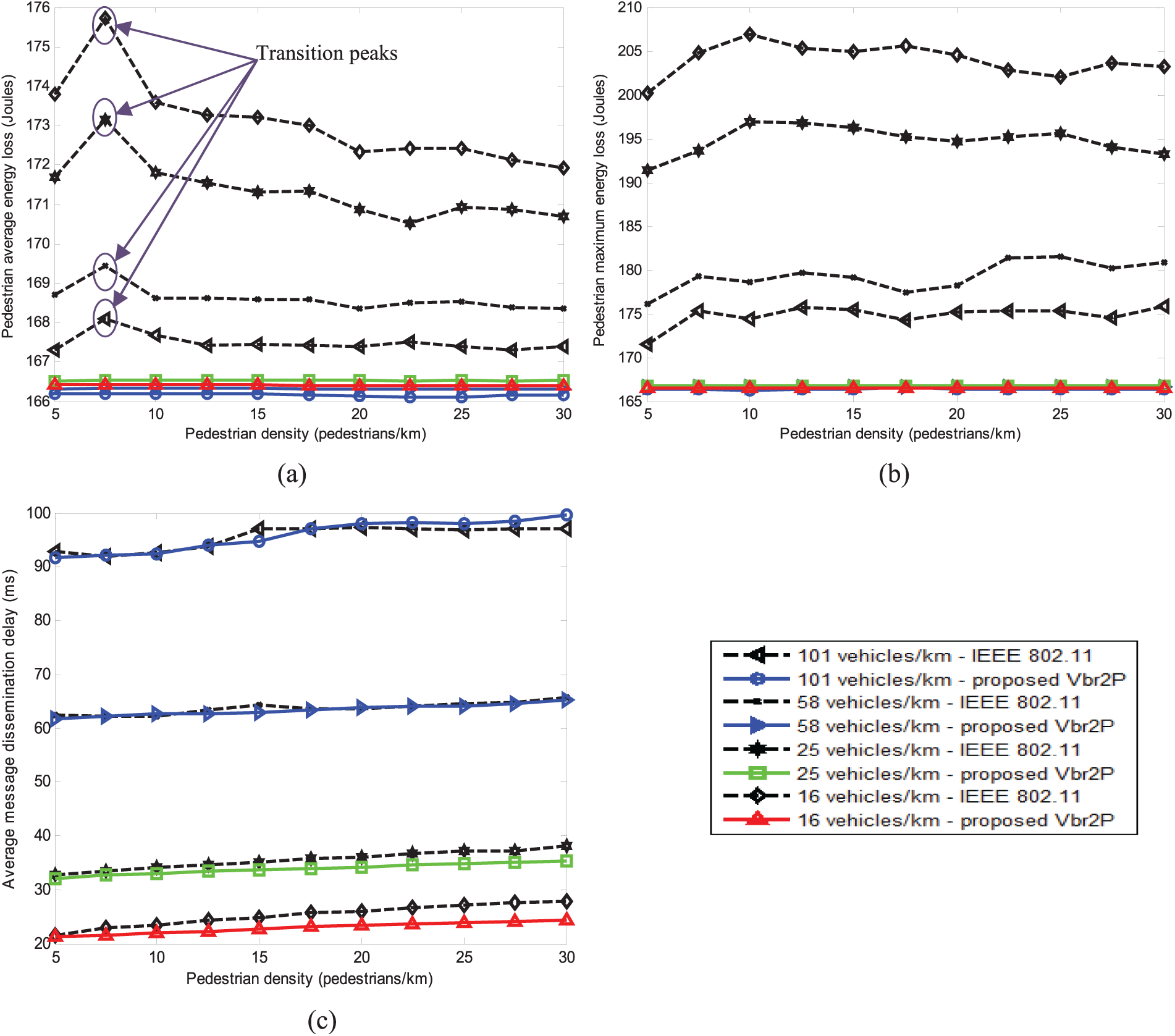
(a) Average pedestrian energy loss, (b) pedestrian’s maximum energy loss, and (c) average end-to-end delay considering various pedestrian densities.
It can be observed that as the vehicle densities increase in the conventional IEEE 802.11 system, the pedestrian energy loss keeps decreasing. This is attributed to the minimized participation of all the nodes in the periodic broadcasts due to an increase in the channel contention. On the contrary, for the proposed Vbr2P, there is a slight variation in the energy loss as the vehicle density increases for all pedestrian densities. The same phenomenon explained above is referred to for the maximum energy loss shown in Figure 10(b). It should be noted that the proposed Vbr2P significantly shows almost the same energy loss at various pedestrian densities given the same vehicle density. This is mainly because an increase in pedestrian density affects the amount of energy consumed only when the additional number of pedestrians find themselves within the event-triggering range for P2V communication.
Considering the results of IEEE 802.11 in Figure 10(a) for all vehicular densities, as the pedestrian density increases from 5 pedestrians/km to a peak of about 7.5 pedestrians/km, the energy loss tends to increase. Thereafter, the energy loss decreases and maintains relative stability as the pedestrian density increases. Thus, there exists a critical pedestrian density that initiates a transition phase behavior after which the energy loss tends to converge. The results in Figure 10(a) for the proposed Vbr2P show that the energy loss quickly converges to a relatively stable value over all the pedestrian densities.
The difference in the energy loss convergence in the two approaches (IEEE 802.11 and the proposed Vbr2P) is the effect of the heavily populated pedestrian clusters that express the self-similar feature of the SLAW mobility model. To say, the majority of the nodes as is seen in Figure 8 mainly exist at waypoints forming highly populated clusters and a few nodes in flight.
The pedestrians in the populated clusters are bound to share a close proximity (in terms of separation distance) to any vehicle. This means that the pedestrians in the same cluster are likely to request for channel access at the same times in order to transmit their event-driven BSM. It can, therefore, be stated that as the pedestrian density increases, the cluster size increases to a point where the number of transmissions by the pedestrian nodes begin to decrease due to a greater channel contention. It is the very channel congestion by the pedestrians in the clusters that leads to a reduction in transmission frequency, hence a reduced energy dissipation. For our study scenario, this transition phase from high- to low-energy usage is realized at 7.5 pedestrians/km as seen in Figure 10(a) for the IEEE 802.11 standard.
End-to-end delay analysis
End-to-end delay is a major concern in vehicular communications for safety studies. In the Vbr2P protocol design, elimination of the periodic broadcasts and using event-driven communication from the pedestrian node reduces the channel contention. This further reduces the queuing delays and the end-to-end delay.
Observations in Figure 10(c) show that the Vbr2P scheme provides a lower delay compared to the conventional IEEE 802.11 broadcast style for the low vehicular density at various pedestrian densities. As the vehicular densities increase, the end-to-end delay also increases due to increased channel contention leading to increased backoffs that, in turn, causes longer queuing delays. At medium and high vehicular densities of 58 and 101 vehicles/km, respectively, the end-to-end delay tends to have a small variation in both schemes.
In the Vbr2P, high vehicle density causes shorter V2P separation distances which, in turn, causes an increase in the frequency of the event-driven pedestrian transmissions, hence affecting end-to-end delay in the Vbr2P. Nevertheless, the Vbr2P was orchestrated with the main objective of minimizing pedestrian energy loss which it achieves as seen in Figure 10(a) and (b).
PDR analysis
PDR provides information on what ratio the transmitted messages have been received. Figure 11(a) shows the PDR achieved in both the Vbr2P and the conventional IEEE 802.11 for the various vehicular densities given a 5-pedestrian/km low-density scenario. At a low vehicular density represented by 16 vehicles/km, the PDR for the proposed Vbr2P is slightly better than that for the conventional IEEE 802.11 style. The slight difference in channel contention for both schemes due to the small node density is the reason behind this observation.

PDR achieved at various separation distances for (a) 5, (b) 15, and (c) 30 pedestrians/km.
By comparing the medium density (58 vehicles/km) and high density (101 vehicles/km), the Vbr2P approach provides a better performance in the PDR though not large. This phenomenon arises because of the channel congestion problem in the conventional approach. In the Vbr2P, there are lesser number of nodes contending for the channel; therefore, it gives alleyway for the transmission of more packets by the vehicles.
The pedestrian nodes also contribute to the transmission conditionally as earlier discussed in the Vb2P design. The same phenomenon expressed above on the PDR with regard to Figure 11(a) applies to Figure 11(b). In Figure 11(c), which represents a high-pedestrian density scenario, the proposed Vbr2P exhibits an improved PDR performance compared to the conventional system.
At low vehicle densities (25 vehicles/km and below) and a 100-m separation distance, the conventional broadcast style is better than the Vbr2P. However, as the distance increases, the Vbr2P is better in terms of PDR. At high vehicular density, the PDR performance compared to the conventional style shows an increase.
High node density increases contention for channel access, therefore leading to a broadcast storm which plays a high negative role in the PDR performance of the conventional IEEE 802.11 style of broadcasting. The broadcast storm is minimized by the event-driven communication from the pedestrian in the Vbr2P. The effect of higher node density is stronger in the conventional IEEE 802.11 style compared to the higher node density in Vbr2P. Again, increasing pedestrian density in Vbr2P does not necessarily mean directly increasing the proportion of the BSM transmitting nodes because pedestrian node transmission only takes place when an event-triggering instance has occurred. This explains why the PDR performance of the Vbr2P is even better in our scenario when the pedestrian density is increased. A perfect scenario is that after increasing the pedestrian nodes, only the vehicles will periodically transmit their BSMs, and some percentage of the added pedestrian nodes may participate in the event-driven transmission. The other pedestrian nodes (which are not transmitting) only keep receiving the BSMs. In this case, the total number of nodes (both pedestrians and vehicles) contending to access the communication channel is lesser compared to the conventional IEEE 802.11 BSM periodic broadcast mechanism where all nodes must transmit BSMs periodically. The lesser contention for channel access in the Vbr2P implies that more BSMs can be transmitted compared to the conventional IEEE 802.11 style. Therefore, by computing the ratio of the number of BSMs transmitted to the number of BSMs received, the result would show an increase in the PDR. This phenomenon is observed in Figure 11(a)–(c).
The better performance exhibited by the Vbr2P in terms of PDR and delay shows that the proposed system not only improves energy consumption but also improves the reliability in V2P safety communications.
Number of backoffs
Backoff is a result of a transmission request to a busy channel due to other transmissions. Signal collision in the channel (physical layer) also leads to backoff. In the physical layer, multipath objects such as buildings, tree cover, and others cause fading effects in the signal which contributes to packet loss and errors. The number of backoffs based on the EDCA mechanism for low, medium, and high vehicular densities is shown in Figure 12(a)–(c). The results show that the proposed scheme maintains relatively the same number of backoffs in each case but lower than the conventional scheme.

(a–c) The number of backoffs encountered in low, medium, and high vehicle densities, respectively, due to the EDCA mechanism at the MAC layer.
At the physical layer, packet loss rate estimation techniques such as those defined in Jiang et al. 32 due to collisions and multipath effects were presented and would be relevant in the determination of how much collisions have occurred. For clarity, Figure 12(a)–(c) is specific to the backoff count due to the EDCA mechanism at the MAC layer. The number of backoffs shown in Figure 12(a)–(c) is an aggregate of both the pedestrian and vehicle backoff instances.
The proposed scheme competes the legacy IEEE 802.11 because of the minimization of the broadcast storm caused by periodic beaconing. The results show that more backoffs are encountered by both schemes as the vehicular density increases. However, the proposed scheme maintains relatively the same number of backoffs at various pedestrian densities. The reason behind this phenomenon is the event-driven pedestrian communication, which in many cases will render the network to have fewer participating nodes unless an event is triggered.
Conclusion
In this article, we proposed a broadcast scheme called Vbr2P for V2P safety communications that minimizes the pedestrian device energy consumption by eliminating periodic broadcasts from the pedestrian nodes and enabling event-driven broadcasts based on V2P separation distance. Through mathematical and simulation analysis, the pedestrian broadcast participation method can reduce the energy loss of the pedestrian device without compromising the end-to-end delay and PDR. The proposed system improves the end-to-end delay in the communication system, especially in low vehicular density, and improves the PDR particularly in highly dense vehicle and pedestrian scenarios.
This study can further be conducted to include a sleep and wake-up management mechanism for pedestrian nodes by roadside units when there is totally no vehicle in order to eliminate the pilot message beacon which the pedestrian nodes transmit as mentioned in this article.
This work did not target the P2P communication layer; hence, future work can also be directed toward investigating P2P communications in vehicular environments. Furthermore, packet loss and error estimation for the proposed scheme based on different radio channel characteristics is useful for future work. This study is relevant for communication protocol designers targeting V2P safety.
Footnotes
Handling Editor: Carlos Calafate
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF-2016R1D1A3B03934420).