
Abstract
In this study, a new formation behavior problem for second-order multi-agent systems with time delay is investigated in the presence of antagonistic interactions. We first proposed a formation behavior protocol with time delay for each agent in the antagonistic network. Then, by a frequency-domain analysis, a sufficient and necessary condition is derived to guarantee the consensus stability of the multi-agent system. It is shown that the agents in the same group form their own desired formation while keeping a desired relative position with other groups. Finally, numerical simulations are provided to illustrate the obtained results.
Introduction
In the past few years, formation behavior problems of multi-agent systems have attracted considerable attention from various fields, such as robotics, biology, physics, engineering, as well as computer science. Formation behaviors widely exist in the nature world, which makes individual agents to perform their own tasks by collecting neighbor information and maximize the coordination functions. For example, the formation of a flock of geese can be adjusted automatically so as to evade enemies or overcome obstacles, when they flying from one place to another place. In addition, fish herd or wild animals act like organisms when foraging for food and escaping predators, and they will reach a desired formation instead of dispersing randomly.
Inspired by these natural phenomena, numerous researchers have devoted to the study of formation behavior.1–17 Animal formation behaviors to forage food and avoid predators, such as flocking or schooling, require the individuals to stay in the group and yet simultaneously keep a separation distance from other members of the group.11,12 Chu et al. 12 developed an anisotropic swarm model and presented the results concerning the average behavior, aggregation and cohesiveness, and complete stability of the swarm. So far, there are many improvements have been made to solve formation behavior problem in a practical application. Balch and Arkin 15 theoretically analyzed and evaluated the formation behavior problem that enable a robotic team to reach navigational goals, avoid hazards, and simultaneously remain in formation. Three popular methods are mentioned in the literature, namely, behavior-based method, virtual structure approach, and leader-follower strategy.
In real circumstance, communication delays exist ubiquitously. It is well known that communication delays between agents may frequently occur due to the congestion of communication channels, the asymmetry of interaction, and the finite transmission speed. So, a lot of works about the consensus problems of multi-agent systems have taken into account the effects of the communication time delays.7,8,10,13,18 And the linear constrained consensus problems on second-order multi-agent systems in unbalanced networks with communication delays are studied. 13 Moreover, Liu et al. 7 investigate consensus of second-order dynamics with time-varying communication delays. Sufficient conditions are obtained in terms of linear matrix inequality by Lyapunov theory.
For the existing results, a great number of efforts on the formation behavior problems are focused on cooperative systems to exchange information in some studies.9–13 While in several real-world scenarios, some agents may collaborate while others compete.14–25 As far as we know, less attention has been paid to these antagonistic networks in multi-agent systems. Antagonistic interactions are represented as signed graphs, that is, graphs which can assume also as negative weights. A positive/negative weight can be associated to a allied/adversary relationship between the agents linked by the edge. Hu et al. 24 analyzed the formation behavior problems on antagonistic networks in directed and undirected systems; all agents be divided into two groups, and within each group, agents converge to their desired formations in an opposite direction.
Motivated by the results mentioned above, this article focuses on the antagonistic interaction behavior of networks with time delay for second-order multi-agent systems, and the agents collaborate in the same group while competing in different groups. Then, a new algorithm is proposed for each agent to achieve an antagonistic formation, where agents in the allied groups converge to their own desired formation with an opposed relationships to other group agents. By the frequency-domain analysis, a equivalent system is considered to analyze the stability of the close-loop multi-agent system, and the maximum delay is related to the maximum eigenvalue of the graph Laplacian.
In this article, some notation will be used.
Graph theory
Let
The undirected graph is connected if there is a path from every node to every other node. A path

Obviously, the Laplacian of any undirected graph is symmetric. We consider the antagonistic networks in the signed graphs, which leads to the fact that Laplacian matrix is special. With the transformation D,
Lemma 1. 26
If the undirected graph G is connected, then the Laplacian L of G has the following properties:
0 is a simple eigenvalue of L associated with the eigenvector
The other
Antagonistic formation behavior of agents
For the simplicity of presentation, we take four-group antagonistic networks of agents into consideration. At first, consider a multi-agent system that consists of n agents, each agent is regarded as a node in an undirected graph G. Modeling the dynamics of ith agent as follows

where
The n agents belong to the four hostile groups

The antagonistic interaction network G.
In the antagonistic formation behavior problems, the desired formation vectors

for any
In this article, our aim is to propose a formation law using local and neighbor information to enable the multi-agent systems to form four antagonistic groups, where each group converges to their desired formation. To solve such problem, the control law is presented as follows

where
If

Then, we consider the transformation D and denote

Since
Let

By simple calculation, we have
Then, the network dynamics can be denoted as

where

and where
Remark 1
In this section, we consider the four-group antagonistic networks of agents. All the agents will be spontaneously divided into four groups, and the agents in the same group form a desired formation while keeping a desired relative position with other groups, that is to say, agents cooperate with each other in the same group while competing in different groups.
Stability analysis of interaction network
Lemma 2
Let

Then, for any
Theorem 1
Suppose that the communication topology G is undirected and connected. Then, using protocol (4), four-group antagonistic behavior is achieved for the multi-agent systems (2) if and only if
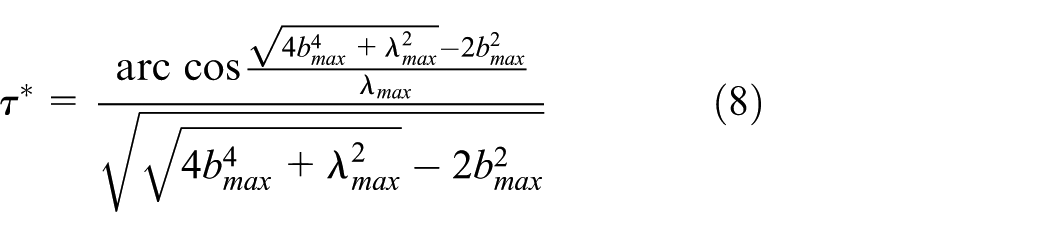
where

Proof
Consider system (7). Since

It follows that

Then, system (7) is equivalent to

where the disagreement vector
Moreover, there exists an orthogonal matrix Q satisfying

where

where

Then, analyze the equivalent system (11) instead. Note that

We define

Then, calculating the determinant of

In order to guarantee the stability of system (11), all the roots of

Then, consider the critical condition by the frequency-domain analysis to guarantee that


From equation (16), we have

Then, by inserting equation (17) into equation (15), we have

Let

It follows that

Suppose that

Hence, equation (20) has only one positive real root assumed as

then

By inserting equation (19) into equation (17), we have

It follows that

Next, we calculate the smallest

It is obvious that

where

It follows that

And equation (17) can be also rewritten as

Therefore

Moreover, we consider the condition when

By the Routh stability criterion, it can be easily obtained that all the roots of equation (14) are all located on the open left half-plane.
Simulation
In this section, a numerical simulation is provided to demonstrate the four-group antagonistic networks under the proposed formation behavior algorithm (3). The following communication topologies associated with second-order multi-agent systems are given in Figure 2.
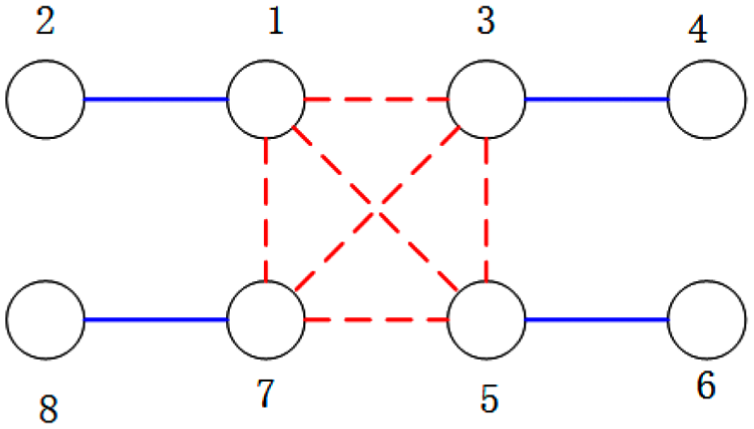
The communication topology of the multi-agent system.
Example 1
Consider a multi-agent system with eight agents (agents 1 and 2; 3 and 4; 5 and 6; and 7 and 8 represent four antagonistic groups), and the initial value of the agents is set randomly. Moreover, the solid and dashed lines show the cooperative and confrontation relationship between agents, respectively, and we can assume that the weight

Formation behaviors of four antagonistic groups. Boxes (a) and (b) are the initial position and Box (c) is the final position.
Figure 4(a) and (b), respectively, shows the state trajectories from X and Y directions. Obviously, all of agents reach a consensus of four-group antagonistic interaction behaviors. Since the multi-agents are second-order system, it naturally considers the velocity trajectories as shown in Figure 5(a) and (b).

State trajectories of all agents in different directions and different lines denote eight agents: (a) state trajectories in X direction and (b) state trajectories in Y direction.

Velocity trajectories of all agents in different directions. The velocity trajectories with different lines denote eight agents: (a) velocity trajectories in X direction and (b) velocity trajectories in Y direction.
By equation (8), we easily obtained

The behavior of agents when

The behavior of agents when
Conclusion
In this article, antagonistic interaction behaviors of networks are investigated for second-order multi-agent systems with time delay. To solve this problem, we propose a distributed formation control algorithm for each agents to realize antagonistic interaction behaviors. Under the designed protocol, all agents belong to four groups, where agents in the allied groups achieve their own desired formations while keeping an antagonistic interaction with other groups. By the frequency-domain analysis, a sufficient and necessary condition is derived to ensure all agents reach consensus, and it is proved that the largest tolerable delay is related to the largest eigenvalue of the graph Laplacian. Finally, numerical simulations are showed to prove the effectiveness of our theoretical results.
Footnotes
Academic Editor: Zebo Zhou
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.