
Abstract
In this article, the distributed
Introduction
In the past decade, consensus problems of multi-agent systems have drawn more and more attention from researchers in different fields. Numerous results have been obtained on consensus problems.1–22 For example, Ren and Beard
1
proposed some second-order consensus algorithms to guarantee the state consensus of systems subjected to the saturation of the actuator and limited available information. Pavone and Frazzoli
2
and Wang et al.
3
proposed different control algorithms for symmetric formations in multi-agent systems. And a survey of formation control of multi-agent systems was presented in Oh et al.
4
Sepulchre et al.,
5
Ren,
6
and Lin and Jia
7
studied the collective rotating motions, where the circle centers of all agents are assumed to converge to a fixed point. Lin et al.
8
studied the general composite-rotating problem. Several problems may emerge in the practical applications, for example, the multi-agent systems are often subjected to various disturbance, which includes actuator bias, measurement errors, calculation errors, and external disturbance caused by communication or measuring. The disturbance effects or even destroys the stability of multi-agent systems. Therefore, it is significant to investigate the effects of disturbance for multi-agent systems. Lin et al.
9
studied the robust
Inspired by the above literatures, the robust
The following notations will be used throughout this article.
Graph theory and robust H∞ control theory
Some basic knowledge of graph theory and
Graph theory
Let
Zero is a simple eigenvalue of
The rest
Robust H∞ control theory
In this section, some basic knowledge on robust

where


The problem description
Consider a multi-agent system is composed of

where
The main aim of this article is to design a distributed control algorithm to enable all agents to move together in a circular orbit under a desired constant angular velocity

for all

for all
Main results
Control algorithm design and network dynamics
The disturbances are usually unavoidable in practical applications for the multi-agent systems. Therefore, it is significant to study the robust
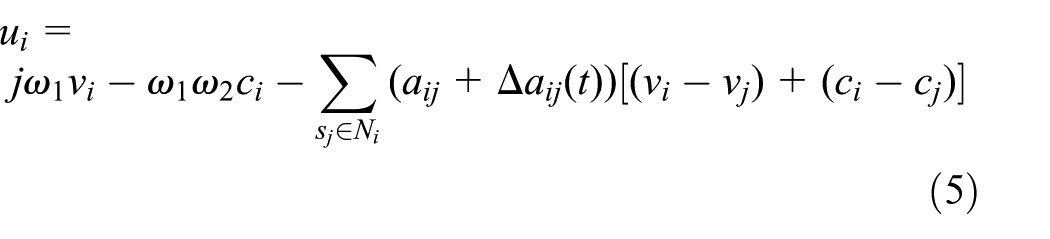
for
The algorithm (5) contains two parts. The first part can ensure that all agents can move in a composite-rotating way by the effects of

where
The output functions can be assigned as

Since all agents can be removed to a fixed point by vectors

denote
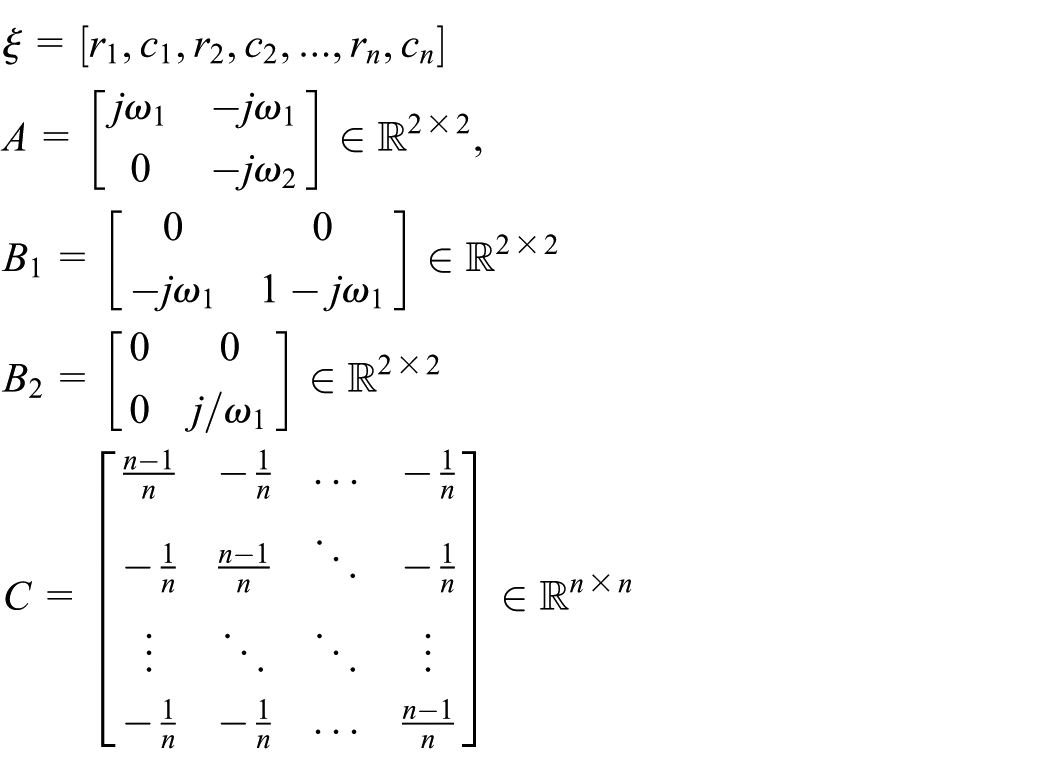
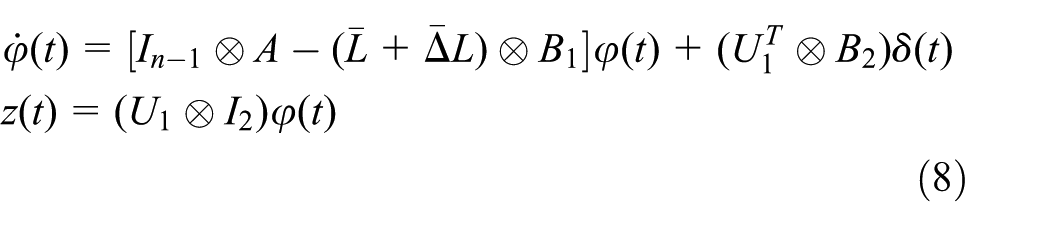
By applying the algorithm (5), the network dynamics can be rewritten as the following equation

where
Define the

where
In this section, the definition of the composite-rotating consensus, the distributed control algorithm, and the closed-loop network dynamics of the multi-agent system were proposed. However, it is much harder to give the sufficient conditions for all agents achieving composite-rotating consensus with the
composite-rotating consensus control
The eigenvalues of
There exists an orthogonal matrix

and the last column is
For convenience, denote

The system (6) is exponentially stable with
First, pre-multiplying the matrix

It can be known from Lemma 1 that

Denote

The output function

From the equations above, it is clear that the output function is dependent on


where




Then, the control algorithm (5) can make the multi-agent system (6) reach composite-rotating consensus with the

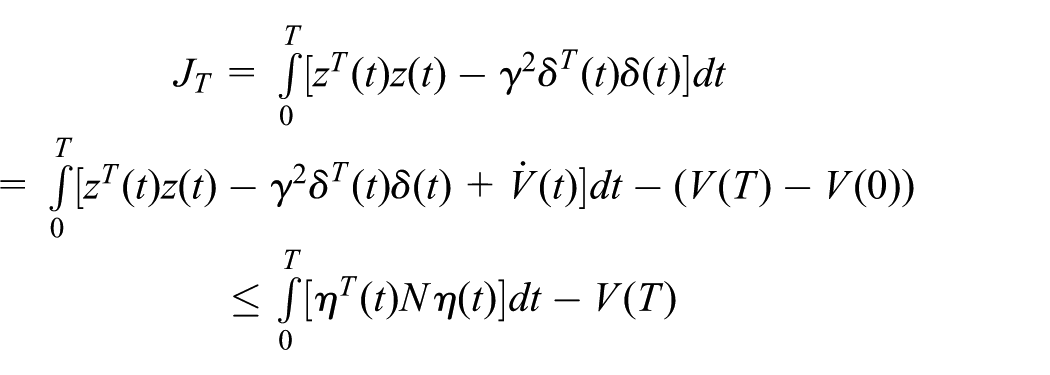
Calculating

Noted that

We have

Consequently

According to the theorem of linear superposition, the response of a linear system is the sum of a zero input response and a zero state response. The former is triggered by the non-zero initial condition, meanwhile the latter is triggered by the external input. Therefore, in order to analyze the effects of the external disturbance
For any
where

Simulations
Numerical simulations will be given in this section to illustrate the theoretical results obtained in the previous section. The graphs
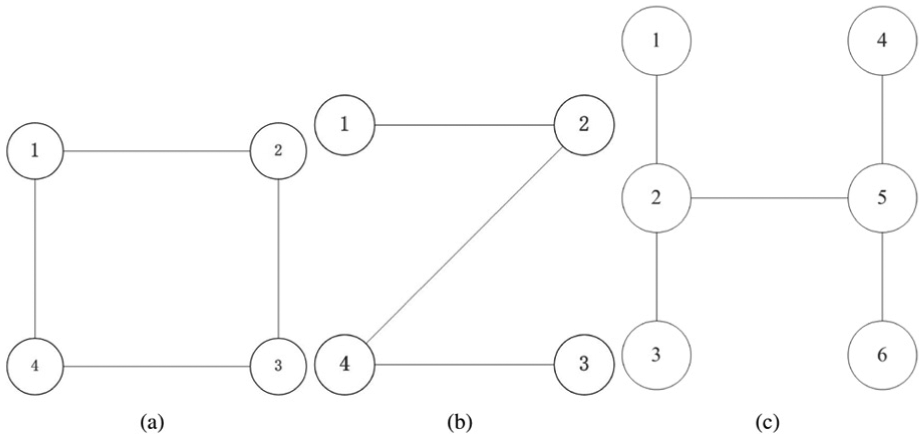
Undirected graphs of the 4-agent systems and 6-agent system: (a) G1, (b) G2, and (c) G3.
Suppose that the weight of each edge is 1, the uncertainty of each edge is

The external disturbance usually exists in the form of pulse or step signal in the practice. So, take the external disturbance

is a step signal. Suppose that the
Figures 2–4 illustrate that all the agents can reach composite-rotating consensus with external disturbances and uncertainties.
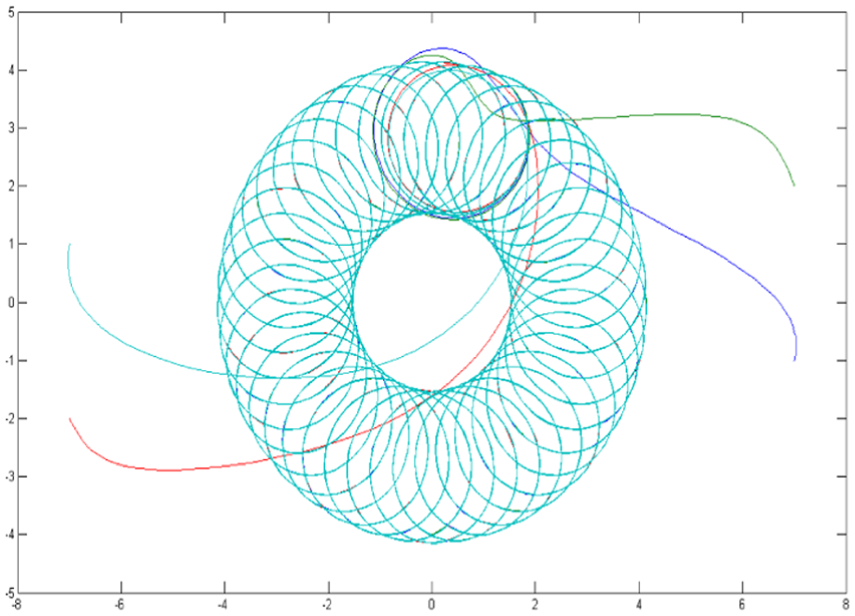
Position trajectories of the agents for G1.

Position trajectories of the agents for G2.

Position trajectories of the agents for G3.
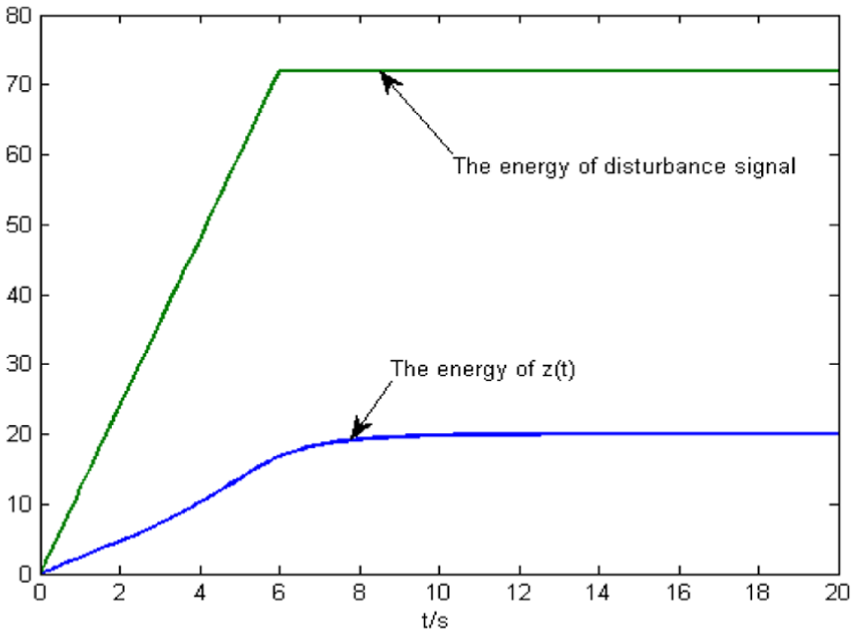
Figures 5–7 show the energy of the controlled output and the external disturbance of the three topologies in Figure 1. Obviously, the composite-rotating consensus can be achieved with the desired
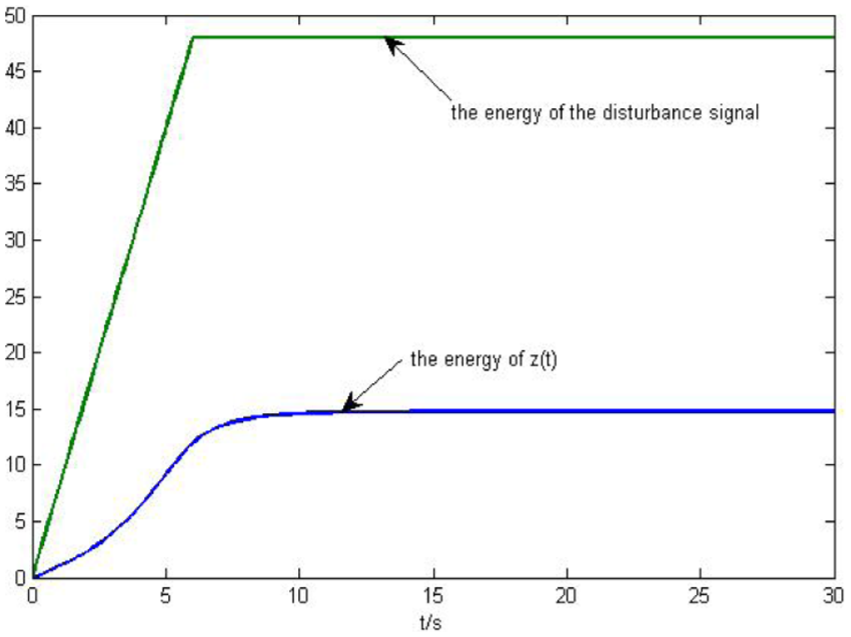
The energy trajectories of
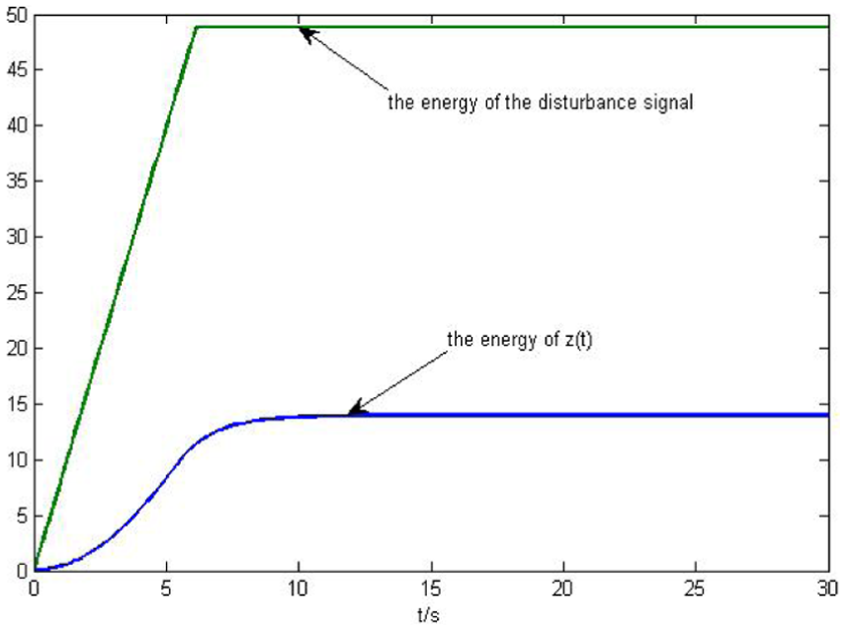
The energy trajectories of
The energy trajectories of
Conclusion
In this article, the robust
Footnotes
Academic Editor: Hassen Fourati
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation (Grant No. 61304155).