
Abstract
These days, vehicles are equipped with in-vehicle sensors so that they can collect the situation-related information, such as velocity, heading, and position. From the viewpoint of intelligent transportation system, platooning is getting more attention because of its advantages of increased road capacity, fuel saving, safety, and so on. In this article, we propose a mechanism that allows vehicles to form platoons based on their own and 1-hop neighbors’ sensory information obtained from vehicular communications. Within a platoon, the front vehicle is the leader whose role is leading the platoon, so the stability of the leader is the most critical performance factor of platooning. To achieve this, we propose to use relative mobility information of vehicles computed from the sensory information for the leader election. The performance of our platooning mechanism is evaluated by carrying out ns-3-based simulations, especially from the perspective of leader stability and road capacity.
Keywords
Introduction
Along with the progress of IT and transportation systems, the intelligent transportation system (ITS) has effectively integrated a range of advanced IT into the transportation system. For example, an ITS technology called the automated highway system (AHS) 1 has been proposed to accomplish autonomous driving by connecting vehicle intelligence with the intelligent technologies, such as sensors, installed on the existing highway infrastructure and making vehicles communicate with highway infrastructure. With the help of the AHS control system, vehicles can form a platoon by following a leader vehicle with a small headway. 2 Grouping vehicles into a platoon can improve traffic efficiency, capacity of roads, and safety of vehicles. 3 Platooning can also reduce energy expenditure due to air drag reduction, avoid errors of drivers, leading to less accidents and damages, and reduce the traffic congestion and jams. Moreover, platooning allows vehicles within a platoon to efficiently transmit and share information among them.
Because of high deployment cost of AHS, sensors in vehicles are utilized in accomplishing platooning. The cooperative adaptive cruise control (CACC) 4 helps in reducing the distance between vehicles by utilizing laser and lidar sensors, making vehicles drive tightly to increase the road capacity. The vehicular ad hoc network (VANET) 5 allows vehicles to exchange sensing information such as position and velocity with their neighboring vehicles with no or little help of infrastructure in the formation and maintenance of platoons.
In this article, we extend our previous work 6 to propose the autonomous platoon leader selection (APLS) mechanism which autonomously selects a vehicle as a platoon leader based on vehicular communications by overcoming the restriction of only a specific truck or bus being selected as a platoon leader. This mechanism utilizes the in-vehicle sensing information, such as velocity and position, in electing a stable leader vehicle for a stable platoon structure. In our mechanism, the vehicle traveling ahead of the others and of a stable velocity has high possibility of becoming a platoon leader. It is realized using the suitability value calculated based on both the normalized average relative velocity of a vehicle and the distance from the vehicle to the average position of its neighbors within the transmission range of vehicle-to-vehicle communications. By our mechanism, the road capacity is increased and the fuel consumption is decreased meanwhile the traveling time is reduced.
The rest of the article is organized as follows. In section “Related work,” we will describe the related work on platoon formation. Section “Stable leader election for platooning” describes the detailed operation of our proposed mechanism. In section “Performance evaluation,” we evaluate the performance of our mechanism and analyze the simulation results. Finally, section “Conclusion” concludes this article.
Related work
For facilitating an evolution in the use of modern transportation systems, several platooning strategies for VANETs have been discussed in the literature. However, most of these mechanisms focus on platoon management and control of vehicles and none of them took platoon leader election into consideration when creating a platoon in VANET. As a result, these mechanisms are not able to create a platoon autonomously.
There has been some research work done on vehicle platooning. In safe road trains for the environment (SARTRE) 2 and the partners for advanced transit and highways (PATH), 7 the leader vehicle of a platoon continuously provides follower vehicles with the information from AHS and platoon maneuvers. In Robinson et al., 2 a platoon can be composed of both heavy vehicles, for example, trucks or busses, and passenger vehicles. In this project, a sedan car can only be a follower vehicle in a platoon. In Browand et al., 7 vehicles are organized into platoons with closely spaced vehicles, and the selection and the maneuver of a platoon leader are under the control of AHS.
Larson et al. 8 proposed a coordinating platoon formation mechanism by utilizing a distributed network of controllers installed at major junctions in a highway network for heavy-duty vehicle platooning. The controllers can adjust the speed of vehicles moving close to the intersections so that they can reach the junction synchronously and create a platoon. When the fuel saving of a heavy-duty vehicle from platooning is larger than the cost of adjusting speed to approach a junction, the controller notices the vehicle to modify its speed. And the controller determines whether a vehicle should create or join a platoon at the junction or keep moving alone. Through this mechanism, platoons can find the shortest path from the origin to the destination and vehicles regulate their velocities slightly to coincide with those of other vehicles.
In Jia et al., 9 based on the characteristics of platoon dynamics under traffic disturbance, the authors derive the desired platoon parameters that adapt to the requirements of traffic environment and VANET connectivity. All platoon members adjust their speeds to adapt to the negative influence of dynamic traffic circumstance. The leader vehicle is designated and the driving strategy can maintain a desired inter-platoon spacing that can help to acquire the desired traffic dynamics under the constraints of VANETs.
In Hoshino, 10 a reactive clustering mechanism is proposed for the platooning of mobile robots. The mechanism can make robots be organized into small platoons according to the dynamic traffic situation. Each robot creates a cluster with its preceding and following robots according to distance and velocity. When a platoon is stopped at an intersection, the leader robot maintains its platoon organization with the following robot even after it passes through the intersection.
In Kanda et al., 11 a multicast-based cooperative communication mechanism for platoon management is proposed by utilizing the Bloom filter called the platoon filter. Each vehicle is given with an instant car license number which is hashed. A leader vehicle registers its hash value to the platoon filter and broadcasts the filter to its neighbors. Each follower vehicle inserts its own hash value to the received filter and sends it back to the leader. Thus, each follower vehicle knows to which platoon it belongs. The leader vehicle performs the OR operation on the filters from its follower vehicles, and, as a result, the leader can judge which vehicle belongs to its platoon or not. This scheme can decrease the amount of communications and improve the reliability of communications.
The above-mentioned mechanisms have been proposed for the control of vehicle and platoon management. Under the control of AHS infrastructure, a specific heavy or special vehicle is designated as a platoon leader in most of the literature. There is no mechanism that autonomously selects leader vehicles without restricting them to specific designated vehicles. In this article, we propose the APLS mechanism that allows autonomous platoon leader election that can react readily to the highly dynamic traffic environment and shorten the traveling time while retaining the advantages of platooning.
Stable leader election for platooning
Overview of vehicle platooning
In this article, we assume the highway environment for platooning. When a vehicle moves at a high speed, a large amount of fuel is consumed because of the air drag. Therefore, creating a platoon with a large platoon length enables to decrease the air drag. Moreover, the traffic lights and junctions are not densely placed on a highway, so it is necessary to create platoons and move stably on a highway than on an ordinary road for saving fuel and increasing traffic throughput. Because of all these reasons, on a highway, it is preferred to create platoons.
We assume that a platoon moves on a designated lane and other vehicles move on the other lanes. All vehicles frequently share their own sensing information with other vehicles via beacon messages. A platoon includes a leader vehicle leading the platoon and one or more follower vehicles moving tightly after the leader vehicle as shown in Figure 1: 3
The leader vehicle (LV) is responsible for creating, managing, and figuring out information of the follower vehicles. For example, the leader vehicle can identify and broadcast its own Platoon ID periodically, decide whether a vehicle can be added into the platoon, and allocate a mission to the vehicle. The leader vehicle determines whether two platoons should be merged into one or whether a platoon should be split into two.
The follower vehicles (FV) are within a transmission range of its leader vehicle, and each follower vehicle adjusts its speed and intra-platoon distance by referring to the received sensing information from the leader vehicle and its preceding vehicle.

A group of vehicles in a platoon.
Relative mobility–based leader election
When a platoon is created, it is desirable for a vehicle to be elected as a leader which is traveling ahead of others and is of a stable velocity. It is determined by the suitability value calculated according to the relative mobility information of the neighbors of a vehicle X. Table 1 shows the notations used in the APLS mechanism.
Notations.

Each vehicle calculates the difference of its velocity from the average velocity, Vavg(X), of its neighbors. Also, it figures out how far its position is to the average position, pavg(X), of all of its neighbors. The normalized average relative velocity, V(X), of a vehicle X is calculated as the following



where n is the number of X’s neighbor vehicles, N(X) is the set of neighbor vehicles of X, vi is the velocity of vehicle i, and vcur(X) is the current velocity of X. From equations (2) and (3), the relative velocity of X is normalized by the standard deviation, σv(X), of the velocities of all the X’s neighbors. Here, for the sake of simplicity, we assume that the x and the y coordinates of a vehicle are abstracted to the position of the vehicle. We calculate the average position pavg(X) of the neighbors of X as the following

where pi is the position of vehicle i. The distance d from X to the average position of its neighborhoods is expressed as follows

where pcur(X) is the current position of X. The distance from X to its any neighbor vehicle is less than or equal to the maximum transmission distance Dmax, so the range of d is between +Dmax and −Dmax. The positive value of d means that X moves in front of the average position of its neighbor vehicles; otherwise, it moves at the back of the average position.
The smaller V(X) is, the closer the velocity of X is to the average velocity of its neighbors. The larger d is, the more ahead X travels. Finally, the vehicle X calculates its suitability value W(X) as follows

where 0 < α ≤ 1, and α indicates the sensitivity of W(X) to V(X). When α is not equal to 0, the value of W(X) is influenced by the velocity. The smaller V(X) is and the larger d is, the greater W(X) is. The vehicle with the largest W(X) is selected as the platoon leader. For example, when V(X) is equal to 0, the maximum value of W(X) is equal to the maximum value of d (i.e. the maximum transmission distance Dmax). The influence of velocity, V, and transmission range, d, on the suitability value, W, is depicted in Figure 2.
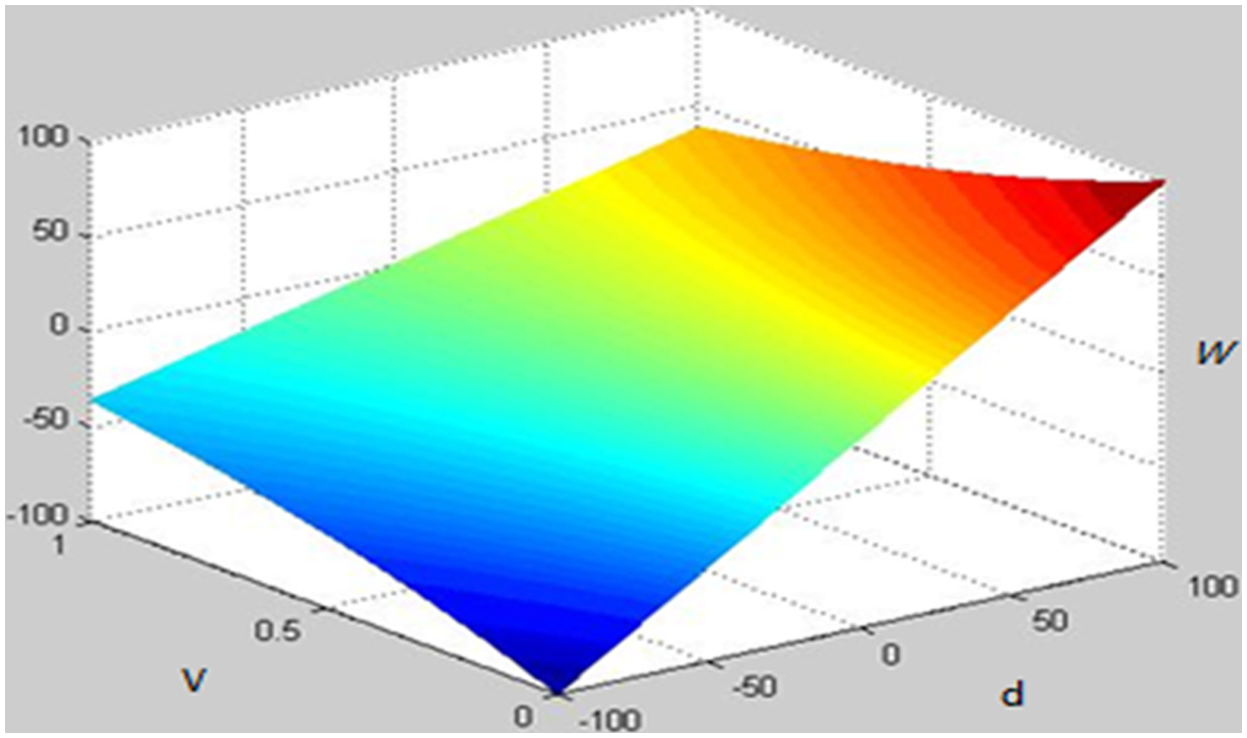
Suitability value for various V and d values, with α = 1.
Platoon formation
For the creation of platoons, we define a control message, the leader vehicle (LV) control message, composed of the five fields: Flag, Vehicle_id, Vehicle_position, Vehicle_speed, and Status fields (see Figure 3). The status of a vehicle is one of the three possible values: leader vehicle (LV), follower vehicle (FV), or no platoon. The Flag field is 2-bit long and identifies four types of control messages—the Beacon message (00), the LV_Announcement message (01), the LV_Give up message (10), and the LV_Leave message (11):
Beacon message (00). This is sent to deliver its sensing information to its neighboring vehicles.
LV_Announcement message (01). This is sent to the follower vehicles to announce its becoming a leader vehicle and to form the platoon led by itself.
LV_Give up message (10). When a leader vehicle wants to give up its role, this message is sent to the platoon members to notify them of reelection of a new platoon leader.
LV_Leave message (11). If a leader vehicle intends to leave its platoon, it sends an LV_Leave message to its platoon members.

The format of the LV control message.
Each vehicle waits for a random amount of time before sending an LV_Announcement message. In the IEEE 802.11 medium access control (MAC) protocol, the distributed coordination function (DCF) controls the media access using the mechanism of carrier sense multiple access with collision avoidance (CSMA/CA). Vehicles utilize the contention window (CW) size which is doubled until it gets the maximum value whenever a collision occurs. In our mechanism, the time before a vehicle announces an LV_Announcement message to be a leader vehicle is determined by the suitability metric value, W

where CWmin is the minimum CW size and CWmax is the maximum CW size. The larger distance from a vehicle to the average position of its neighborhood is and the smaller the normalized average relative velocity of a vehicle is, the greater W is. According to equation (6), the suitability value W is less than or equal to Dmax. So, the larger suitability value W is, the shorter waiting time is. Also, WaitTime is calculated based on CW.
When vehicles intend to create or join a platoon and enter a designated lane, they broadcast beacon messages periodically so that vehicles can react readily to highly dynamic traffic environments. The initial status of a vehicle is the no-platoon status. Each vehicle calculates its suitability value based on the information from beacon messages and calculates its waiting time based on the suitability value and CW. When a vehicle does not receive an LV_Announcement message during its waiting time, it becomes a platoon leader vehicle (LV) and broadcasts an LV_Announcement message periodically to the follower vehicles so that it can lead platoon member vehicles timely. When a vehicle receives an LV_Announcement message from a backward leader vehicle, it ignores this message. Figure 4(a) shows the procedure of leader vehicle election. If a leader vehicle (t0) receives an LV_Announcement message from a preceding leader vehicle (t1) during the LV competition based on the waiting time, it gives up its LV role and follows the preceding leader vehicle. The procedure of LV competition is shown in Figure 4(b) and (c).
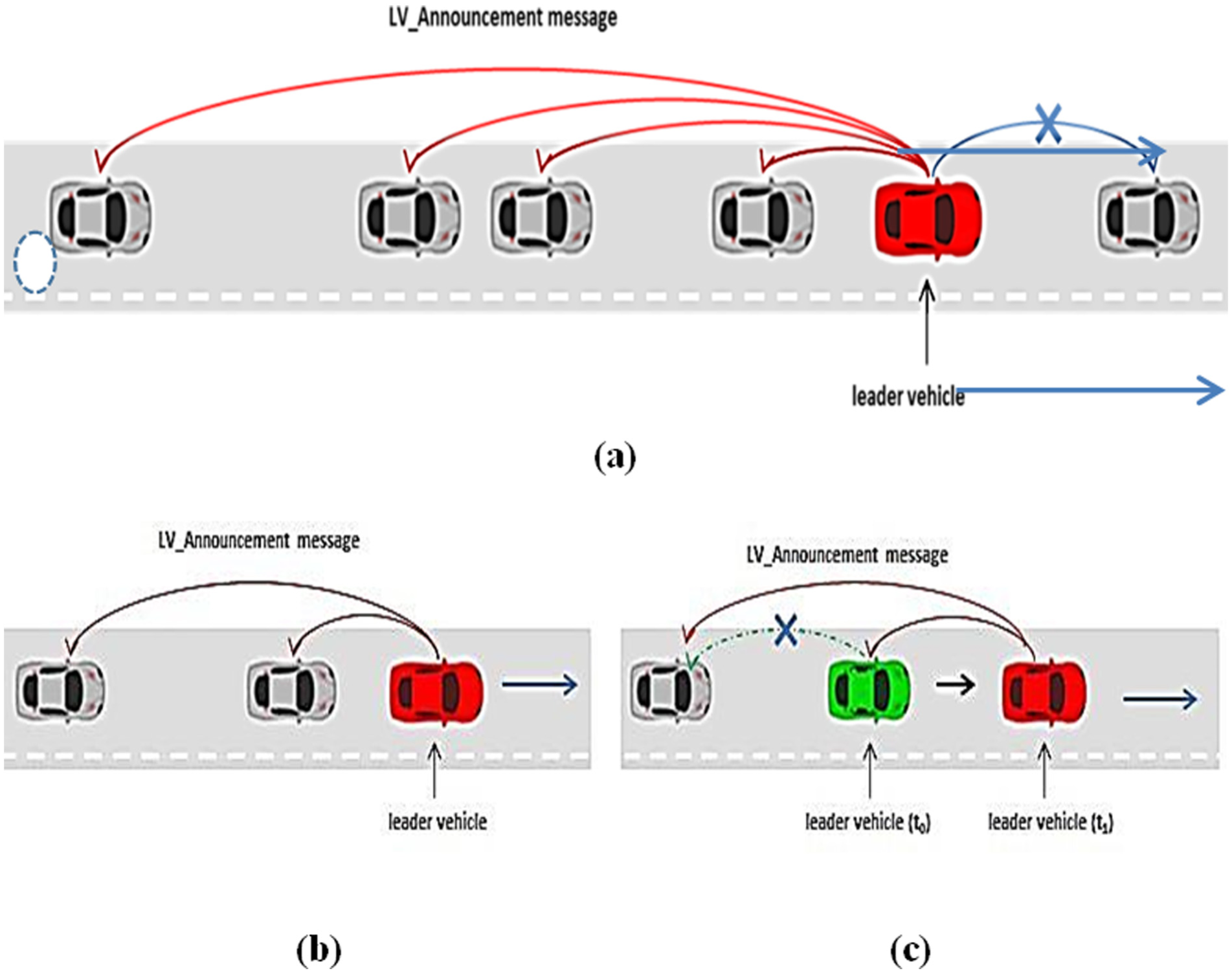
Examples of platoon formation: (a) the transmission of an LV_Announcement message, (b) the leader vehicle election, and (c) the LV competition based on the waiting time.
The vehicle which is behind the leader vehicle and receives the LV_Announcement message from the leader quits the LV competition and joins this platoon to be a follower vehicle (FV). The follower vehicle need not send any message to the leader vehicle and adjusts its velocity according to the velocities of its preceding and the leader vehicles.
A leader vehicle selects a more suitable leader to follow and gives up its LV role if it receives an LV_Announcement message from a preceding leader vehicle. At that time, two platoons merge to be one. If a follower vehicle successively receives more than one LV_Announcement messages from different vehicles, it chooses and accepts only the LV_Announcement message sent by the foremost leader vehicle. When a leader vehicle wants to leave or give up its role, it sends an LV_Leave or LV_Give up message to its follower vehicles and notifies them of reelecting a suitable leader vehicle. It is also likely that a potential following vehicle can find another LV. Figure 5 shows the procedure of platoon formation and merging. The platoon formation procedure is described in Algorithm 1.

Merging of two platoons.
Platoon formation procedure.

For the sustainability of a platoon, the speed of the follower vehicle need be adjusted according to the information provided by the preceding and the leader vehicles. For example, in CACC, the constant-headway policy keeps a given time headway between two neighbor vehicles. A vehicle adjusts its speed and acceleration to the desired ones in order to maintain a platoon.
Performance evaluation
We carried out the ns-3 simulator 12 -based performance evaluation. The IEEE 802.11p standard protocol is used for the vehicular wireless communications. The IEEE wireless access in vehicular environment (WAVE) is based on the dedicated short-range communication (DSRC) and supports the WAVE short message protocol (WSMP). We utilized WSMP to send beacon messages on one control channel and simulated a long single-lane highway with the speed limit of 35 m/s and the mean speed of 30 m/s. We have monitored 20/50/100 vehicles on a 10-km-long highway for 500 s.
We utilized different network parameters in our simulations. The transmission rate is set to 6 Mbps, and the beacon interval to 100 ms. In order to analyze the performance of platooning mechanisms, we used different transmission ranges. The transmission range is varied from 60 to 200 m.
We assume that all vehicles are platoon-enabled and intend to join a platoon. The follower vehicles of a platoon move at the same speed as that of their leader vehicle and the intra-platoon distance (i.e. the inter-vehicle distance in a platoon) is set to 10 m. The configuration parameters for the platooning scenarios are listed in Table 2.
Simulation parameters.

MAC: medium access control.
We evaluate and compare our APLS mechanism with the following schemes:
Fixed-leader mechanism. Under the control of AHS, a truck or bus is selected as a leader vehicle and its role in a platoon is fixed. In the fixed-leader mechanism, the position of a leader vehicle in a traffic flow affects the performance of platooning and traffic flow. In our simulations, the leader vehicle is fixed at the front.
No platooning. There is no platoon in a traffic flow. The performance of platooning is well shown by comparing it with no-platooning mechanism.
Distance-based reactive clustering mechanism (DRCM). 11 A vehicle organizes a platoon with the closest vehicle. Because the mobility information is used to organize clusters in this mechanism like ours, this mechanism is chosen to be compared with ours.
Performance metrics
Platoon stability
A platoon structure is required to be stable even under dynamic mobility situations, that is, the platoon leader should not change often unless it leaves the platoon. Vehicles keep joining platoons to be follower vehicles along their travel route. When a leader vehicle changes or merges with a preceding platoon, the states of the vehicles change. The number of state changes of the vehicles shows the performance of platoon formation. The smaller the number of state changes of vehicles is, the more stable the platoons created are. The platoon stability is evaluated by summing up the number of state changes of vehicles during the total simulation time.
Platoon formation message overhead
There are two types of platoon formation messages, the beacon message and the LV_Announcement message. Larger platoon control message overhead may hinder the normal communications among vehicles. The platoon formation message overhead is calculated by summing up the number of formation messages generated by all the vehicles.
The number of platoons
Because of the highly dynamic nature of the vehicular network, platoons are created and merged. For creating relatively stable platoons and keeping the current platoon structure stable as much as possible, the more follower vehicles join a platoon with increasing the transmission range of vehicles. The less number of platoons can reduce the overhead during the procedure of platoon formation and merging. The number of platoons is the total number of platoons during the simulation time.
Average platoon size
In a platoon, the number of follower vehicles is called as the platoon size. The platoon size directly impacts the lane capacity. That is, an increased platoon length leads to a higher road capacity. To create a large platoon is a desired capability of a platooning mechanism, and a measurement of the average platoon size provides a good indication of the performance.
To calculate the average platoon size, we measure the total number of platoons and the number of follower vehicles in every platoon during the simulation time. The average platoon size is calculated by dividing the sum of vehicles in every platoon by the sum of counted platoons

where N is the number of platoons and i is the identifier of a platoon and PlSize(i) is the platoon size of the platoon i.
Maximum lane capacity
The aim of grouping vehicles into platoons is to increase the road capacity and the safety of vehicles on a highway. We measure the effect of platooning mechanisms on the road capacity in terms of the maximum lane capacity in veh/lane/h. In Dao, 13 the maximum lane capacity is computed based on the average platoon size AvgPlSize in the number of vehicles as shown in the following equation

where v is the mean velocity (in km/h), h is the inter-vehicle distance in a platoon (in m), s is the mean vehicle length (in m), and T is the minimum interval time between platoons (in s).
Average traveling time
The average traveling time is the average time that a vehicle spends from the origin to the final destination. On a highway, vehicles move at an economic speed (90 ~ 110 km/h) for acquiring the minimum fuel consumption. The shorter traveling time can achieve less fuel consumption, so a good platooning mechanism makes the traveling time of vehicles shorter.
In our simulation, the traveling time is measured as the time from the generation of a vehicle to the moment when the vehicle arrives at its destination. Each vehicle records its generation time and, when the vehicle arrives at its destination, the time difference is used to figure out the traveling time. The average traveling time is calculated over all vehicles using the following equation

where n is the number of vehicles and i is the identifier of a vehicle. TraTime(i) is the traveling time of the vehicle i.
Simulation results
Platoon stability
Figure 6 depicts the results showing the stability of our proposed mechanism. The stability of platooning increases as the transmission range increases. Figure 7 shows the number of state changes of 100 vehicles over the elapsed time. The results demonstrate that the number of state changes of vehicles is stable after about 50 s. Because a vehicle with a larger transmission range can exchange messages with more neighbors, the probability of being selected as a stable leader vehicle becomes higher. Figure 7 shows significant performance gap between the transmission range of 100 and 150 m. The probable reason for this is the inter-vehicle distance which is almost 100 m for 100 vehicles on a 10-km highway.

The number of state changes versus transmission range.
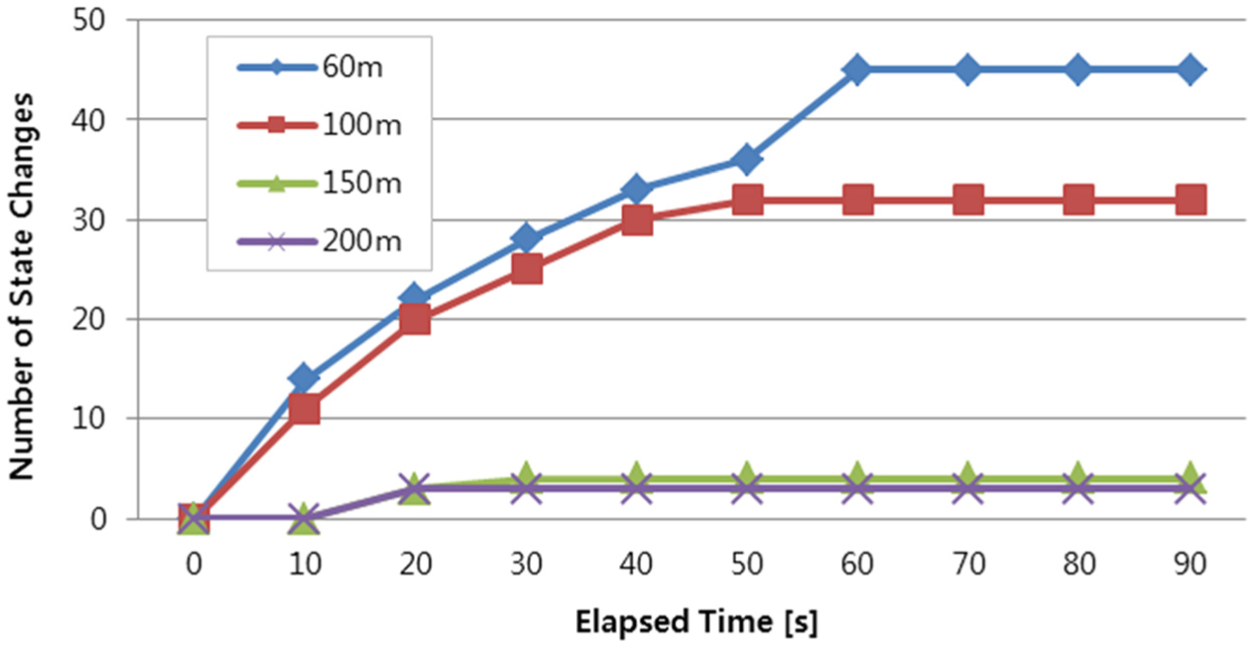
The number of state changes of vehicles versus elapsed time (for 100 vehicles).
Platoon formation message overhead
Figure 8 shows the number of platoon formation messages of our mechanism. More vehicles produce more platoon formation messages, as we have expected. A larger transmission range gives a slightly increased number of formation messages. Figure 9 depicts that the number of formation messages increases slightly for the elapsed time.

The number of platoon formation messages versus transmission range.

The number of platoon formation messages versus elapsed time (for the transmission range of 200 m).
The number of platoons
Figure 10 depicts the total number of platoons for various transmission ranges. The number of platoons created by APLS is less than that by DRCM in all cases and the number of platoons is reduced significantly, especially in APLS, as the transmission range increases. That is, our mechanism can acquire more stable platoon structure with a less number of platoons.

The number of platoons versus transmission range (for 100 vehicles).
Average platoon size
Figure 11 depicts that our APLS creates a larger average platoon size than DRCM based on inter-vehicle distance. In APLS, the average platoon size increases significantly for larger transmission ranges, resulting in higher road capacity. In DRCM, a vehicle decides to join its preceding or following platoon which is closer to itself, so the platoon formation is more dynamic and the platoon size tends to be smaller than APLS.
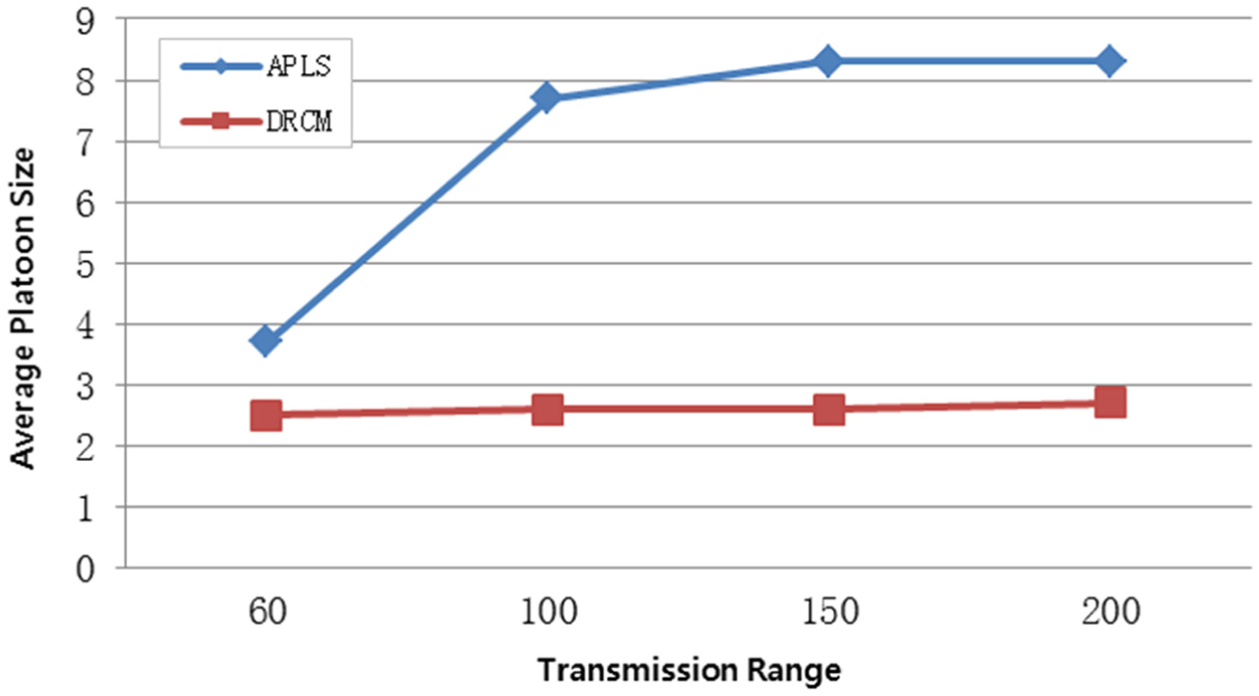
Average platoon size versus transmission range (for 100 vehicles).
Maximum lane capacity
Figure 12 shows the maximum lane capacity 13 for various transmission ranges with h = 10 m, s = 4 m, v = 108 km/h, and T = 3 s. The APLS mechanism shows larger lane capacity than DRCM. In APLS, the maximum lane capacity can be increased up to 4500 vehicles per lane per hour when the average platoon size is eight vehicles for the transmission range of 200 m. APLS achieves larger road capacity with relatively little public expense and without the help of infrastructure.

Maximum lane capacity versus transmission range.
Average traveling time
We measured the average traveling time of 20 vehicles passing through the 10-km highway. Figure 13 shows that the no-platooning mechanism has the worst average traveling time because each individual vehicle is not under the control of any mechanism. As the transmission range increases, APLS gives the smallest average traveling time than the others. Since APLS achieves the smallest average traveling time, the fuel consumption is also minimized in our mechanism.

Average traveling time versus transmission range (for 20 vehicles).
Conclusion
Platooning is a form of autonomous driving that can increase road capacity, fuel saving, and safety. However, most of the work on platooning limits the platoon leader to be a specific designated vehicle. In this article, we propose a platooning mechanism that allows any vehicle to become a platoon leader based on the sensing information of other vehicles obtained from vehicle-to-vehicle communications. The vehicle with stable mobility and ahead of others has a higher possibility of becoming a platoon leader. For the evaluation of the proposed mechanism, we performed simulations based on the ns-3 simulator and compared ours with other schemes and showed that ours outperforms them in terms of road capacity and traveling time.
Footnotes
Academic Editor: Minglu Jin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP; No. NRF-2015R1A2A2A04005646) and the Ministry of Science, ICT and Future Planning (MSIP), Korea, under the Information Technology Research Center (ITRC) support program (IITP-2017-2012-0-00559) supervised by the Institute for Information & Communications Technology Promotion (IITP).