
Abstract
In this article, the target tracking problem in a wireless sensor network with nonlinear Gaussian signal intensity attenuation model is considered. A Bayesian filter tracking algorithm is presented to estimate the locations of moving source that has unknown central signal intensity. This approach adopts a measurement conversion method to remove the measurement nonlinearity by the maximum likelihood estimator, and a linear estimate of the target position and its associated noise statistics obtained by the Newton–Raphson iterative optimization steps are applied into the standard Kalman filter. The Monte Carlo simulations have been conducted in comparison with the commonly used extended Kalman filter with an augmented state that consists of both the original target state and the augmentative central signal intensity. It is observed that the proposed measurement-converted Kalman filter can yield higher accurate estimate and nicer convergence performance over existing methods.
Keywords
Introduction
Recent advances in micro-electro-mechanical systems, networking systems, and embedded microprocessor technologies have drawn tremendous interests and applications of wireless sensor networks (WSNs). A common issue in WSNs is the source localization, which is inherent to many monitoring applications, such as target tracking, infrastructure monitoring, habitat sensing, rescue, and emergency response.1–3 The objective of source localization is to sequentially estimate the positions of a moving target by sensing the signal emitted from the target at a subset of distributed network sensors. These sensors collaborate by reporting sensing measurements to a signal processing center which subsequently estimates the source locations according to the received measurement data.
There exist many methods for source localization that are based on measurement models such as time delay of arrival (TDOA), 4 direction of arrival (DOA), 5 and received signal strength (RSS). 6 Generally, the signal intensity measurements are very convenient and economical to locate a moving target 7 since no additional sensor functionalities and measurement features are required compared to DOA or TDOA modalities. 8 It is known that the intensity of signal attenuates as a function of distance from the source. In the energy-based acoustic source localization applications, the acoustic energy decays exponentially with respect to the distance from source in a free space. 9 In the medical ultrasound applications, the echo signal reflects attenuation and scattering properties of tissue that may correlate with various disease states, and the power spectra of received signals are approximately Gaussian. 10 In the laser manufacturing applications, the nonlinear optical interactions with matter are available from laser beams because of their high power and spectral brightness, and the transverse profile of the optical intensity of the beam can be approximated by a Gaussian function. 11 In the monitoring applications of forest fire, a time-varying elliptical forest fire spread model is adopted to fit to empirical data. This model considers a decreasing intensity Gaussian distribution from the head of fire to the fire tail. 12 In this article, a type of Gaussian attenuation model is presented to facilitate more accurate characterization of signal intensity. Along this direction, we will consider the source localization problem of a moving target with a Gaussian attenuation model of signal intensity.
Previously, several least-squares methods for energy-based source localization using an isotropic signal energy attenuation model are proposed by Li and Hu 9 and Deng and Liu. 13 A more generalized statistical model of energy observation is derived by Meesookho et al., 14 in which an arbitrary acoustic source is characterized by an unknown correlation function, and a weighted direct/one-step least-squares-based algorithm incorporating the dependence of unknown parameters is investigated to reduce the computational complexity. The energy-based sensor network source localization problem is solved by the maximum likelihood (ML) estimation coupled with incremental optimization method in the work by Rabbat and Nowak; 15 however, this approach cannot converge globally and even diverge due to the problem being highly nonconvex. A new normalized incremental optimization algorithm is developed to avoid trapping into the local minima using a diminishing stepsize in the work by Shi and He. 16 In the work by Blatt and Hero, 17 the single-source localization problem is formulated as a convex feasibility problem instead of nonlinear least squares and giving a fast converging localization solution by finding a point at the intersection of some convex sets using projection onto convex sets method. A rough location estimation method is designed to localize an isotropic energy source using measurements from distributed sensors based on kernel averaging techniques. 18 In the works by Niu and Varshney 19 and Ozdemir et al., 20 ML-based target localization approaches using the quantized data of signal intensity measurements are proposed to reduce the communication requirements in WSNs and employing a sequential quadratic programming–based grid search within the surveillance region and a reasonable interval of source signal power to find an approximate maximum location. In the work by Masazade et al., 21 an iterative source localization based on the approximation of the posterior probability distribution function of source location using a Monte Carlo method is proposed for WSNs with quantized source energy measurements. However, due to the lack of knowledge of the target’s motion, 22 these methods hardly obtain nice localization performance without using prediction and filtering algorithms. In the work by Sheng and Hu, 23 a sequential source localization method using particle filter is put forward to estimate and track multiple target locations. The large number of particles to represent the non-Gaussian probability density function (pdf) of the target locations involve expensive calculations. A weighted extended Kalman filter (EKF) algorithm based on recursive weighted least-squares optimization for WSNs is presented by Wang and Wu, 24 and the source location is calculated iteratively by taking a weighted average of the local estimates based on the tasking sensor nodes’ reliability. In the work by Mysorewala et al., 25 an EKF-based localization method using an elliptical forest fire spread model is developed, but the linearization procedure of nonlinear measurement function in the EKF algorithm may incur larger errors in the true posterior mean and covariance of the target state.
To overcome the drawback of EKF, many measurement conversion methods 26 have been proposed to transform the nonlinear measurement models into linear ones and estimate the covariances of the converted measurement noises and then use the Kalman filter, which clearly has better accuracy and consistency than the EKF. 27 These conversion methods always require both the range and bearing measurements (and possibly other parameters) of the target, which cannot be applicable to the case where only the signal intensity measurements are available for target tracking. In this article, we propose a new measurement conversion method using ML estimation with Gaussian intensity attenuation model to compute the converted measurement noise. A linear estimate of the target position can be obtained by an iteration that amounts to re-linearization of the measurement equation to reduce the effects of linearization errors, and an approximate covariance matrix of the converted measurement noise is achieved based on Gaussian approximation of the localization error.
We begin by introducing our signal models and formulating the target tracking problem in WSNs in section “Models and problem formulation,” where the signal intensity attenuates Gaussianly with an unknown central signal intensity. We delineate the EKF benchmark that will come handy in the subsequent derivations, and an EKF with augmented state is designed to estimate the augmented state vector that consists of both the original target state and the augmentative central signal intensity parameter in section “Augmented-state EKF tracking algorithm.” In section “Measurement-converted Kalman filtering algorithm,” we lay out the measurement conversion method using ML estimation, and the new converted target position will be followed by a Kalman filter for recursive estimation of the target state. The performance evaluations of the proposed algorithms are conducted by simulation comparisons in section “Numerical simulations.” Finally, some conclusions are given in section “Conclusion.”
Models and problem formulation
Consider an ad hoc WSN that tracks a target in the two-dimensional plane. The state evolution of target is described by a multivariate discrete-time random process22,28

where
Signal model
We assume that N identical sensor nodes with the same noise statistics are densely deployed over a sensing field. The position of the

where a is the signal intensity at the center of point source and

Signal intensity attenuation model represented by a Gaussian function.
Upon sensing a signal intensity greater than a trigger threshold value r, the sensor acts as tasking node to perform tracking task, and the set of indices of tasking sensors at time k can be denoted by

and then the signal intensity received at the

where

where

The practical signal sources with such attenuation model can be found in ultrasounds, 10 lasers, 11 and fire sources. 12
Problem formulation
For simplicity, we only consider the problem of tracking a single target, but nevertheless our proposed tracking algorithm is also applicable to multi-target tracking as the targets can be classified based on the target signatures. 29 When the target moves through the monitored area, these tasking nodes that have detected the target dynamically form a cluster. One of the nodes in the cluster will be selected as the cluster head, and each cluster member transmits its signal observation to the cluster head. The cluster head serves as the fusion center of the signal and information processing. It selects a set of tasking nodes from the cluster for tracking computation and then broadcasts the estimated target information to its neighbor nodes for the subsequent estimation. 30 More elaborate clustering routing protocols31–33 can be considered but are beyond the scope of this article.
Let
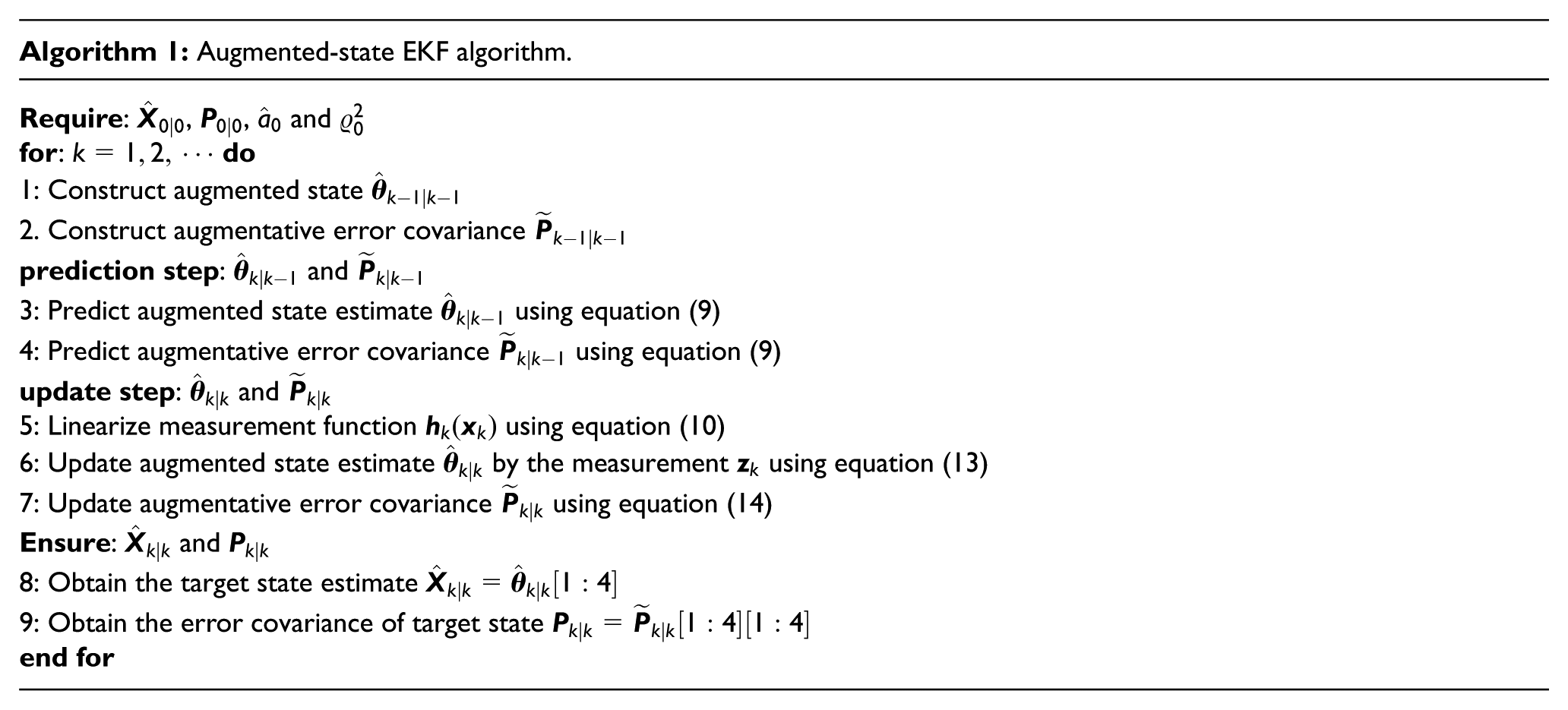
Augmented-state EKF tracking algorithm
The basic filtering solution to the state estimation problem can be obtained by a two-stage recursive process of prediction and update. Since the unknown parameter a is not included in the ordinary state variables
Let

where

In the above equation,

where the proportionality factor
Assume that the previous estimate of target state

and thus, the predictive distribution of

since it is the marginal distribution of

where
From equation (11), it is clear that the posterior distribution of

where


The above equations lead to the state update
Measurement-converted Kalman filtering algorithm
The linearization errors of measurement function approximated by the Taylor series expansion in the EKF algorithm may build up and result in the filtering divergence. 35 In this section, we propose a measurement conversion method to transform the nonlinear measurement model into linear one by a ML estimation method, in which the iterated re-linearization of measurement equation is used to reduce the effects of linearization errors. With the converted linear measurement model, a standard Kalman filter is applied for recursive estimation of the target state.
The conditional pdf of the measurement

The negative log-likelihood function of

the above equation ignores the constant terms not dependent on

The second condition will lead to the following relation of

Substituting equation (19) into equation (17), the unknown parameter a can be eliminated, and giving a modified negative log-likelihood function

The minimization problem of equation (20) can be equivalently stated as a nonlinear unconstrained optimization problem, and the common solution to the optimization problem is found through the following Newton–Raphson iterative method 36

where t is the iteration step, and the initial value

cannot be satisfied, it is shown that the Gauss–Newton method may not be locally convergent at all. 38
In equation (21), the

Then, the element at the
The detailed derivation of equation (23) is put in the Appendix 2.
Considering a second-order Taylor series expansion approximation of
Using the above approximation, it can follow from equations (16) and (17) that

for some constant

which is described by the following linear representation in the target state

where
From equation (9), the predictive distribution of

By Bayes’ rule, and using the fact
thus, the posterior distribution of

where



The recursive computing process of the measurement-converted Kalman filter (MCKF) is summarized in the following Algorithm 2.

We remark that the AEKF is initialized by additionally guessing the initial estimate
Numerical simulations
To show the efficiency of the proposed MCKF, it is applied to a target tracking application in comparison with the AEKF, the traditional extended Kalman filter (TEKF) without measurement conversion, and the pure ML estimator without Kalman filtering. Error performance of the filters is evaluated with Monte Carlo simulations in this section.
The monitored area is 50 m × 50 m and covered by
In the experiments, the source central signal intensity is set at

Additionally, the initial estimate of the variable a in the AEKF is roughly assumed to the trigger threshold of the sensor
In total, 100 Monte Carlo runs with the above noise condition are performed. The results are summarized in the following. Figure 2 shows the tracking trajectories of the four tracking algorithms over a typical simulation run. Figure 3 describes the corresponding mean value of the population of target estimated location biases

Tracking trajectories of the target under different tracking algorithms: the target travels along a circular arc in a WSN of 50 nodes.

The average estimated location biases of 100 realizations under different tracking algorithms: the solid line with marker represents the mean value of population of target estimated location biases for all the time steps.

The average estimated location bias of the whole tracking trajectory in each realization: the solid line with marker represents the average estimated location bias for all the time steps.
Figure 5 gives the mean of quadratic sums of the position state estimation errors in each time step for the four methods, and the distributions of tracking errors of the position states along x- and y-directions together with the corresponding error covariance ellipses of position state are plotted in Figure 6. The error covariance of the position state is defined as

where

The mean-squared errors of the position state estimation under different tracking algorithms: the solid line with marker describes the mean value of the MSE population of 100 realizations.

The tracking errors along x- and y-directions and the error covariance ellipses of the position state: the sample data points are the population of 100 realizations of
Figure 7 shows the average estimate of the source central signal intensity a of 100 realizations at each time step for each tracking algorithm. Specially, the average estimates of a in the AEKF are given for three different initial state cases of a. As shown in Figure 7, the convergence rate of the estimate

The average estimate of a of 100 realizations: the black solid line without marker represents the real source signal intensity a, and the average estimates of a in the AEKF are given for three different initial state cases of a: (a)
To investigate the stability of the proposed MCKF, another simulation is conducted that uses the same setting as above except for different measurement noise and monitoring range conditions as well as different initial state cases of a. Table 1 lists the average root mean square of the target estimated position error (RMSE)
Average RMSEs under different measurement noise and monitoring range conditions with different initial state cases of a.

RMSE: root mean square of the target estimated position error; ML: maximum likelihood; MCKF: measurement-converted Kalman filter; TEKF: traditional extended Kalman filter; AEKF: augmented-state extended Kalman filter.
Conclusion
In this article, we consider a practical Gaussian attenuation model to facilitate more accurate characterization of source signal intensity. With the nonlinear Gaussian intensity attenuation model, two Bayesian filtering tracking algorithms (AEKF and MCKF) are developed. The Taylor series linearization error of nonlinear measurement function in the AEKF would lead to unstable tracking performance, and its convergence performance is extremely sensitive to the initialization accuracy. The measurement conversion method in the MCKF is used to remove the measurement nonlinearity using the ML estimation method, and a linear estimate of the target position is obtained by an iteration that amounts to re-linearization of the measurement equation to reduce the effects of linearization errors. The converted measurement and its associated noise statistics are then used in a standard Kalman filter for recursive update of the target state. Simulation results have shown that the MCKF can yield higher accurate estimate and nicer convergence performance than the AEKF and the TEKF as well as the commonly used ML estimation approach. The discussion in this work is limited to the case of single target. Multiple target scenarios will be addressed in future works.
Footnotes
Appendix 1
Appendix 2
Academic Editor: Li-Minn Ang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Foundation of President of the China National Institute of Standardization (No. 512016Y-4697) and the National Natural Science Foundation of China (No. 61501448).