
Abstract
To solve the false terrain problem caused by the tunnel effect in the conventional multibeam seafloor terrain detection, a detection method of multibeam seafloor terrain based on the ADOS-CFAR (Amplitude Dichotomy Order-Statistics Constant False Alarm Rate) is developed. This paper first discusses the principles and existing problems of the OS-CFAR and K-FINDER algorithms and then suggests the ADOS-CFAR algorithm and its fast calculation method for those problems. By adopting this algorithm into the detection method of multibeam seafloor terrain and carrying out the simulation study on the computational load of the ADOS-CFAR, it is shown that this method has a lower computational load on the premise of ensuring the detection performance. Finally, the proposed algorithm is analyzed and verified through the test data in Songhua Lake. The result indicates that this method can effectively avoid the false terrain caused by tunnel effect with higher terrain detection accuracy.
1. Introduction
The multibeam echo sonar is one of the widely used marine surveying and mapping instruments at present. Its principle is, by estimating the TOA (time of arrival) and DOA (direction of arrival) of the scattered echo signal in each cross beam, to calculate the seafloor depth on the condition that the sound speed is known. The multibeam seafloor terrain detection technology plays an important role in the multibeam detection technologies; its robustness is directly related to the reliability of the detection results. The research focus of the multibeam echo sonar technology has been updated from the conventional technology to pursuing a wide swath width [1] and better robustness [2–5]; more attention has been paid to the effectiveness and authenticity of the detection results. For example, the bathymetric algorithm has been developed from the single “energy center” algorithm to a new algorithm which incorporates the WMT (weight mean time) and the phase difference detection, namely, adopting the WMT in the mirrored area while adopting the phase difference detection in the nonmirrored area. But due to the unknown and invisibility of the real depth of the sea, no matter which bathymetric algorithm is used, we can only obtain the estimation of the so-called genuine seafloor depth under a certain condition (or criterion). Some studies found that the main factors affecting the robustness are the bathymetric artifacts and abnormal values in the multibeam bathymetric technology, where the most typical bathymetric artifact is “tunnel effect” and “refraction effect.” In order to improve the SNR (Signal-to-Noise Ratio) of the received echo from seafloor, the multibeam echo sonar uses various beam forming methods (spatial filters) to enhance the signal and suppress the noise in the received echo. And the FT beam former is the most common used one among those filters. It has been widely applied in the multibeam echo sonar technologies due to its simple principle and good real-time operation. However, the defect of energy leakage is prone to cause the side lobe interference; the echo energy of the vertical-incidence beam leaks into the main lobe directions of all other beams, which impacts the subsequent WMT. The influence on the bathymetric results is that the genuine flat seafloor terrain will be wrongly measured into the false cambered terrain with upturned shapes on the both ends, which is called the “tunnel effect.” Because of the existence of the tunnel effect, a multibeam echo sonar often outputs erroneous terrain information in detection, and Wei et al. [6, 7] did some research from two aspects of side lobe reduction and adaption. The lower side lobe increases the width of main lobe and reduces the terrain detection resolution to a certain extent. The adaptive method, for best results, must be used under the condition in which accurate interference source is confirmed. More importantly, the above methods cost large computation with less efficiency, which leads to many restrictions in practical applications. Chen et al. proposed a tunnel effect elimination method which is based on the apFFT beam forming algorithm [8], further reducing the computational load under the premise of decreasing the leakage of mirrored beam energy, but without the high efficiency also.
On the other hand, the CFAR (Constant False Alarm Rate) has made a great progress in the field of radar; the resultant methods such as CA-CFAR (Cell Averaging Constant False Alarm Rate) and OS-CFAR (Order-Statistics Constant False Alarm Rate) [9] can realize the automatic target detection under the condition of ensuring constant false alarm. Although the OS-CFAR has been applied into multibeam underwater target and seafloor terrain detections with a good capability of detecting marine multitarget [10], it is difficult to be applied in practical applications due to its complex calculation and low terrain detection accuracy while effectually removing tunnel effect. For the real-time implementation of the OS-CFAR algorithm, some details have been studied by many scholars [11–17]. Magaz and Bencheikh improved the calculation efficiency by repeated iterations and maximum value removal [11]. Considering the characteristic of synthetic aperture radar image, Sun et al. [12] raised the computational efficiency by 5 times (target image, 480 × 340, background window, 61 × 61, and protection window, 41 × 41) compared with the conventional methods by fully using the information of the previous 2D sliding window. Hyun and Lee sorted all the data before sliding window detection to increase detection accuracy [13]. More significantly, Ali et al. [14] proposed the K-FINDER algorithm based on OS-CFAR, which avoids large computational load in sorting method and quickly determines order statistics by the iterative-comparative method; Shin et al. [15] proposed the ABIS method based on the principles of insertion sort and sliding window to decrease the computational load to between 44% and 90% of the quick sort algorithm. In the multibeam bathymetry, the efficient and real-time computation is still a challenge. In order to realize better constant false alarm detection, the unified threshold has to be extracted from hundreds of beams in every sampling, and the redundant information of the sliding window cannot be used. Aiming at these problems, we propose the ADOS-CFAR method and apply it to multibeam seafloor terrain detection in order to improve the accuracy of terrain detection in the premise of eliminating tunnel effect.
This paper discusses the principles of the OS-CFAR and K-FINDER algorithms and then proposes ADOS-CFAR and its application in the multibeam seafloor terrain detection method. The computational load of ADOS-CFAR is simulated and researched, and the experimental data is validated and analyzed in Songhua Lake.
2. Fundamental Principles
2.1. OS-CFAR Principle
In order to improve the detection performance of conventional mean methods in multitarget environment, the order statistics (OS) method [9] was proposed by Rohling; the specific progress of the algorithm is shown in Figure 1.

OS-CFAR progress.
Here the CUT (Cell Under Test) is a detection unit; firstly we sort the data near CUT (sampling point from
2.2. K-FINDER Algorithm
To settle the problem of OS-CFAR in calculation, Ali et al. [14] suggested K-FINDER algorithm; the processing progress of the algorithm is shown in Figure 2 and the specific progress is as follows: Calculate the mean from Determine whether If Calculate the mean of the remaining data, and compare the mean with the remaining data; enter step (5). Count
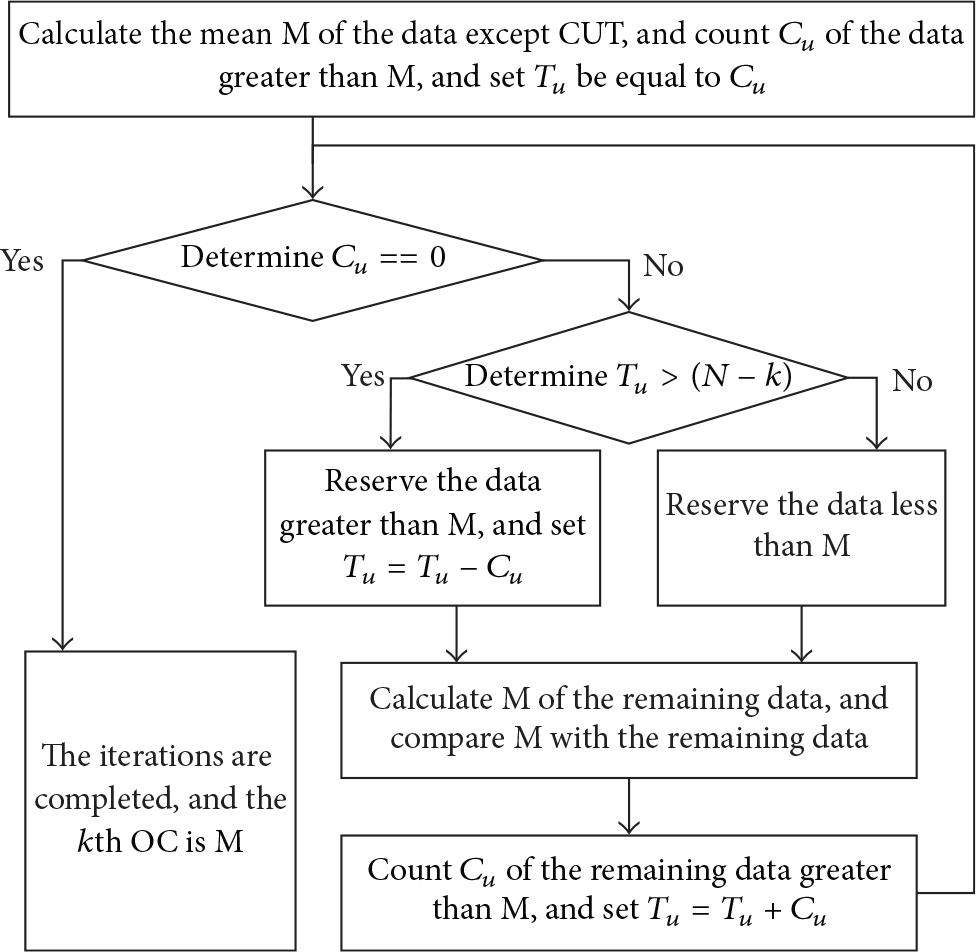
K-FINDER algorithm progress.
Through this method, the time-consuming sorting process is avoided, and
3. ADOS-CFAR Algorithm for Seafloor Terrain Detection
3.1. ADOS-CFAR Algorithm Principle
Although the K-FINDER algorithm has a fast speed, the mean calculation costs too much time, and too many of the iterations need to be finished because the iteration target is Calculate the mean M of the data in the front part before the CUT; select the data greater than M and put them into array B and put the remaining data into array S, count Determine whether Determine whether Determine whether Calculate the mean M of the data in the front part of the array to be compared, put the data greater than M into B, and put the remaining data into S; count
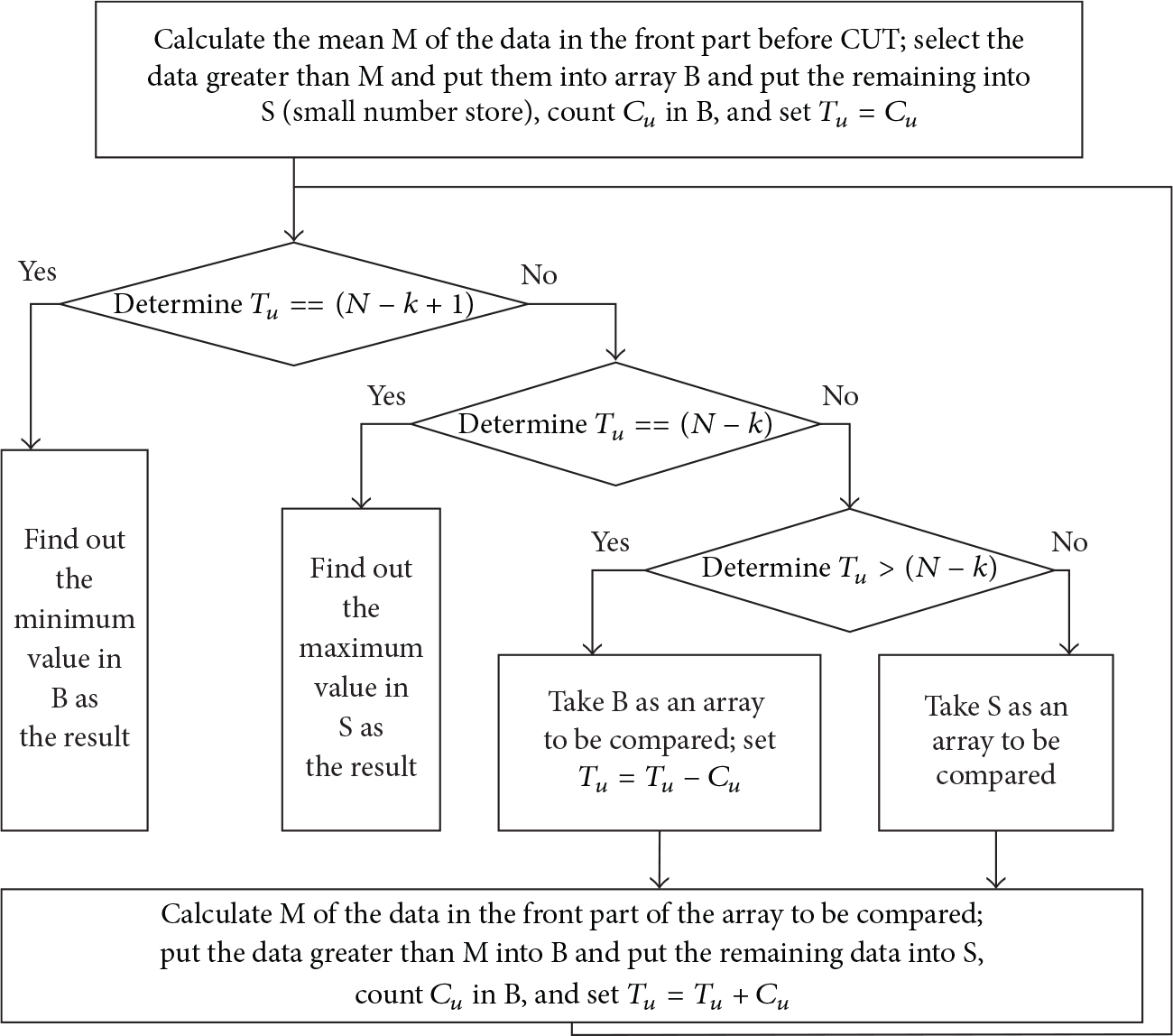
ADOS-CFAR algorithm progress.
3.2. ADOS-CFAR under Loose k Condition
Although the ADOS-CFAR has improved the computational speed, the condition of stopping iterations is still relatively harsh with the complex iterations, causing a large computational load. The basic goal of the OS-CFAR is to set the estimated value

3.3. Fast Calculation under Sliding Condition
In the conventional OS-CFAR, because the detection window slides forward, abundant redundant information can be utilized. Shin et al. [15] introduced insertion sort idea and proposed the ABIS (Anchor-based Insertion Sorting) method to utilize the redundant information, greatly enhancing the processing speed with only computational load N of a single sliding. Nevertheless, this still scarcely solved the computational load problem. Based on the idea of amplitude dichotomy, this paper completely abandons the sorting process; the principle diagram and algorithm progress are shown in Figures 4 and 5, respectively (in the diagram,
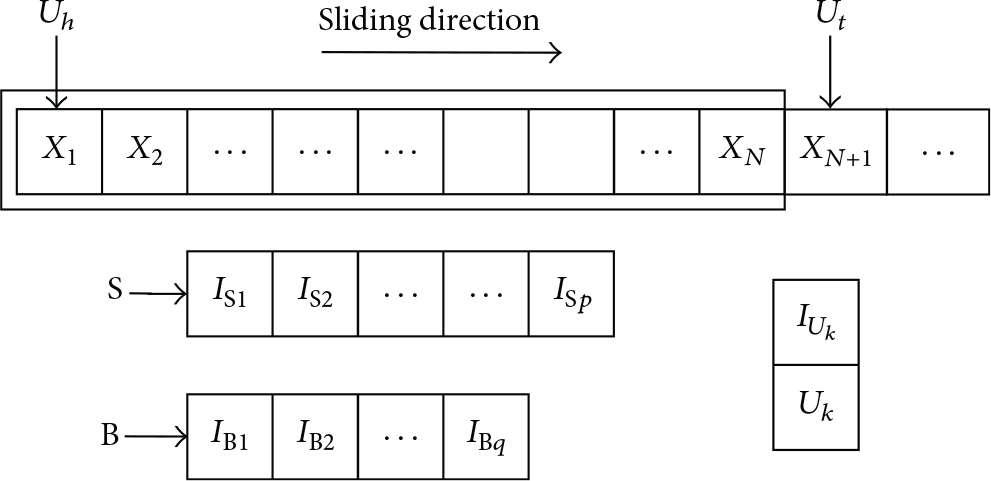
The principle of ADOS-CFAR under sliding condition.

ADOS-CFAR algorithm progress under sliding condition.
The progress (1)–(8) in Figure 5 is as follows: Remove the first serial number of the array S, and add Add Search Delete the first serial number in B, and add Delete the first serial number in S, and add Search Add Remove the first serial number in B, and add
Assume that the background noise of data is the Gauss white noise, the length of processing window is N, and k is set to
3.4. Seafloor Terrain Detection Based on ADOS-CFAR
In order to eliminate the tunnel effect with less computational load, the fast processing method in Section 3.2 is adopted in the beam forming result of each time slice to obtain the estimated value
The essence of the tunnel effect is that the reflection intensity in the mirror beam irradiation area is strong, and the energy leaks into the side lobe, which affects the demodulation of weak echo in the same direction. Through the first step, the strong and weak reflection side lobe energy can be unified on the same interference level; through the second step, the target can be detected automatically in the condition of the constant false alarm, so that the tunnel effect interference can be availably eliminated under the premise of the high computational speed, therefore detecting seafloor terrain effectively and accurately.
4. Simulation and Analysis
4.1. The Rationality Analysis of Loose k Condition
Equation (1) shows that when the average Constant False Alarm Rate is fixed, k has a corresponding relationship with

The relationship between
The flexible value range of k, however, inevitably leads to some loss. In order to quantitatively analyze the loss, the Gauss white noise with 20 dB amplitude and

The signal under Gauss white noise background.
The two methods are counted independently for one hundred thousand times, and the relative deviation of the scale factor

The comparison of relative deviation between the two methods.
4.2. Computational Load Analysis
For quantitative analysis, the statistics of the average number of iterations and computational load of searching
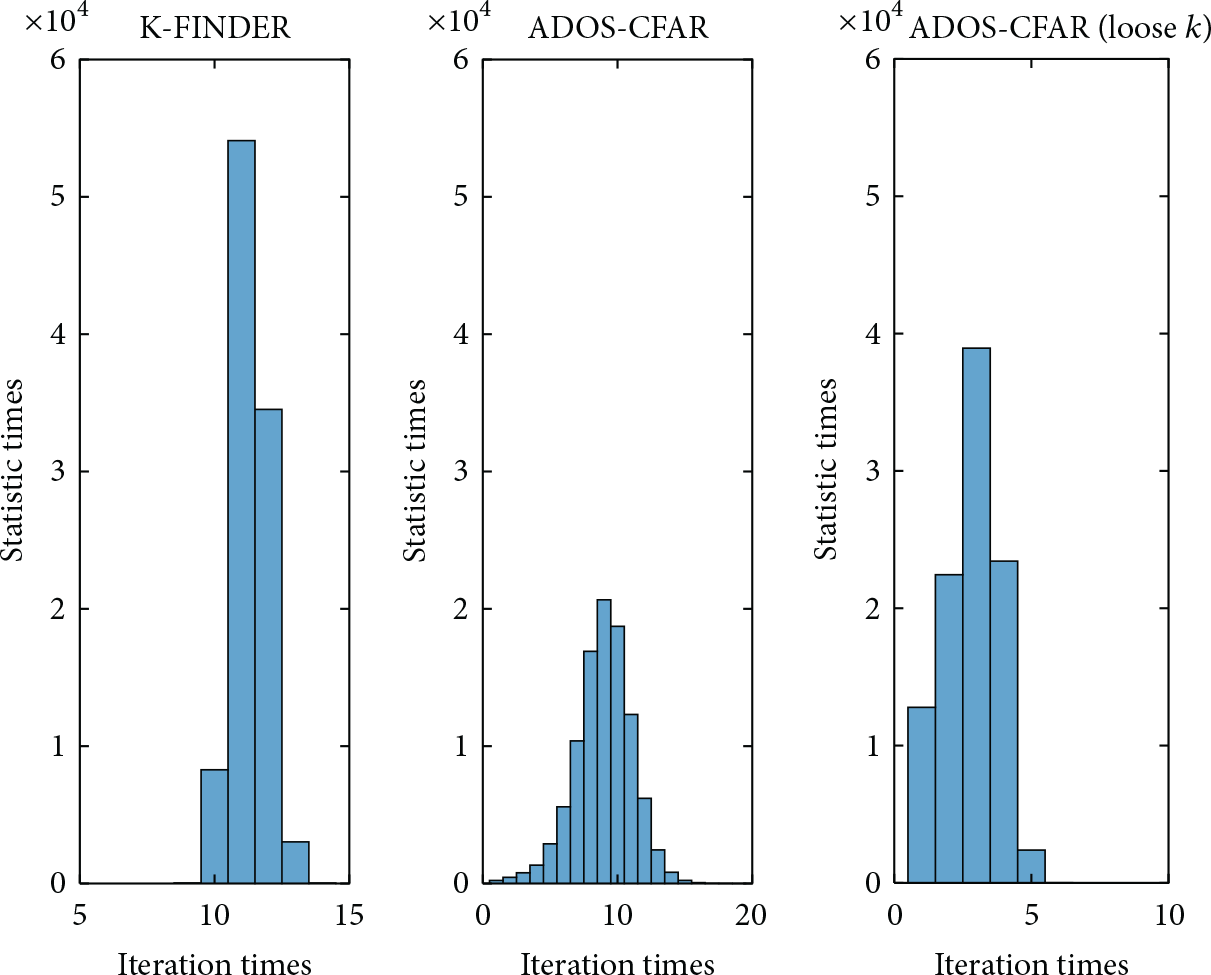
The number of iterations of the three methods.
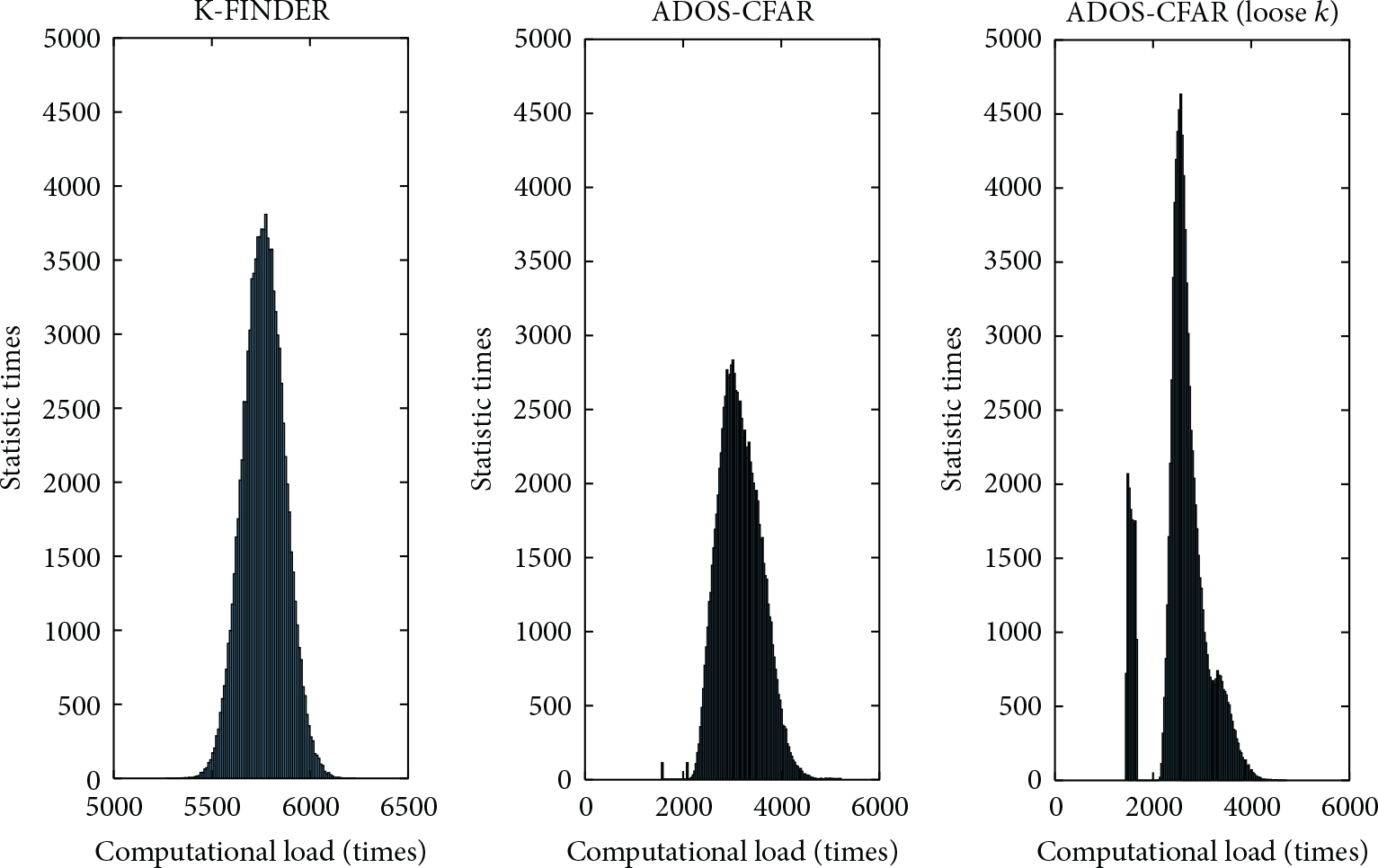
The computational load of the three methods.
In order to further analyze the generality of this method, the number of iterations and computational load of data with different lengths are analyzed according to the above conditions. The average number of iterations is shown in Figure 11, and the average computational load is shown in Figure 12. The figures illustrate that both the number of iterations and computational load of ADOS-CFAR method are less than those of K-FINDER method in the 20~2000 range of N and are even less under loose k condition, which confirms the strong generality of this novel method.

The average number of iterations of the three methods.
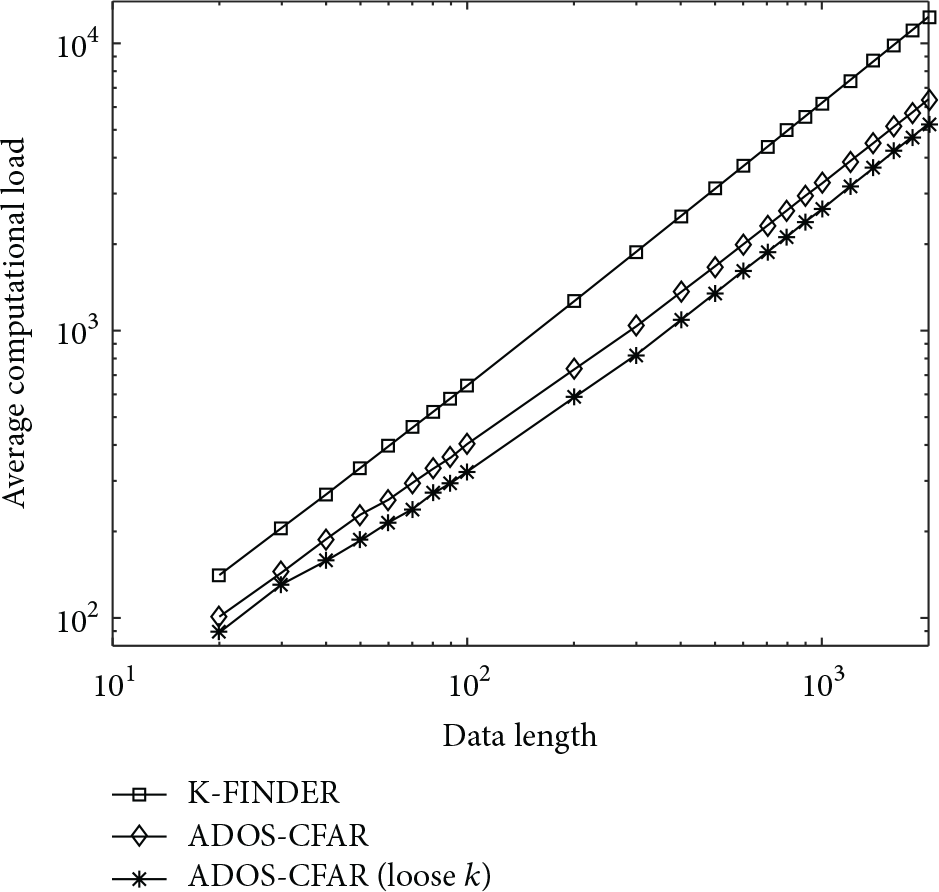
The average computational load of the three methods.
4.3. Algorithm Comparison under Sliding Condition
Due to the introduction of sliding condition, more redundant information can be utilized; the setting of the simulation condition is the same as that in Section 4.1. The sliding window length N is set to be 1024, the signal length is set to be 1001024, and the sliding search of the signal is carried out by the novel method and ABIS. The statistics demonstrate that the average computational load of a single sliding search in ABIS method is 0.9992 N, while the load in the novel method is 0.2808N, which are consistent with the theoretical analysis. It is shown that, under sliding condition, the proposed novel method has a faster processing speed than the ABIS method.
5. The Method Validation by Data Acquired in Tank and Lake
5.1. The Tank Experiment and Data Processing
In order to evaluate the detection accuracy of the proposed method, an experiment was carried out with self-developed HT-300PA multibeam echo sounder in the water tank located in College of Underwater Acoustic Engineering, Harbin Engineering University. The main technical parameters are as follows: operation frequency: 300 kHz, beam width:

HT-300PA multibeam echo sonar.
The structure of the HT-300PA multibeam echo sonar is shown in Figure 14. The HT-300PA multibeam echo sounder (MBES) is based on Mill's cross array Sonar Architecture that networks all of the modules and embeds the processor and controller in the sonar head to make for a very simple installation. The HTCS-3.4 Control Graphical User Interface (GUI) is a simple program that can be installed on any Windows based computer and allows the surveyor to control the operating parameters of the HT-300PA. HTCS-3.4 communicates with the Sonar interface module (SIM) via Ethernet. The SIM supplies power to the sonar head, synchronizes sonar heads, time tags sensor data, relays commands to the sonar head, and routes the raw multibeam data to the customer's data collection computer.

The structure of HT-300PA multibeam echo sonar.
The schematic diagram of the experimental site and the photos of the installed sonar head are shown in Figures 15 and 16, respectively. The length

The schematic diagram of the experimental site.

The photos of the installed sonar head.
The length of transmitted signal in the experiment is 0.1 ms; ping rate is 1 Hz. The raw echo was collected during the experiment, and the raw echo signals of partial channels are shown in Figure 17.
The raw echo signals of partial channels.
In the conventional method, the raw echo signal is processed by filtering, IQ demodulation, FFT transformation, and sector transformation, and the result is shown in Figure 18(a), and the novel method in this paper is normalized by ADOS-CFAR after the FFT transformation, followed by sector transformation. The result is shown in Figure 18(b).

The echo intensity comparison between the conventional method and novel method.
The comparison in Figure 18 illustrates that the proposed method can effectively remove the side lobe interference of the mirror reflection echo. Every beam of results obtained through the two methods is demodulated by the fast processing method in Section 3.3; the results of that are shown in Figure 19. In the conventional method, tunnel effect causes a semicylinder surface terrain (tunnel effect) in the demodulation result, and the novel method completely avoids the interference of tunnel effect, truthfully reflecting the seafloor terrain, which shows that this method is capable of efficiently eliminating the tunnel effect.

The comparison of demodulation results between the conventional method and novel method.
In the terrain detection by a multibeam echo sonar, considering the echo signal, tunnel effect caused by the side lobe interference level is the interference level of the terrain detection, which can cause the false terrain. From the above results, it can be seen that the proposed method can effectively detect the underwater terrain when avoiding the interference of the tunnel effect with high detection accuracy.
5.2. The Lake Experiment and Data Processing
The limitations of the tank experiment are as follows: the depth of water is shallow; the bottom of tank and experimental environment are very ideal. In order to fully verify the effectiveness of the method, an experiment is carried out in a typical water area located in Songhua Lake in Jilin City, Jilin Province, China. The experiment site is shown in Figure 20, the depth of water was about 60 m, and the sonar head was installed on the port of the surveying vessel.

Sonar mounting and placement at the experiment site.
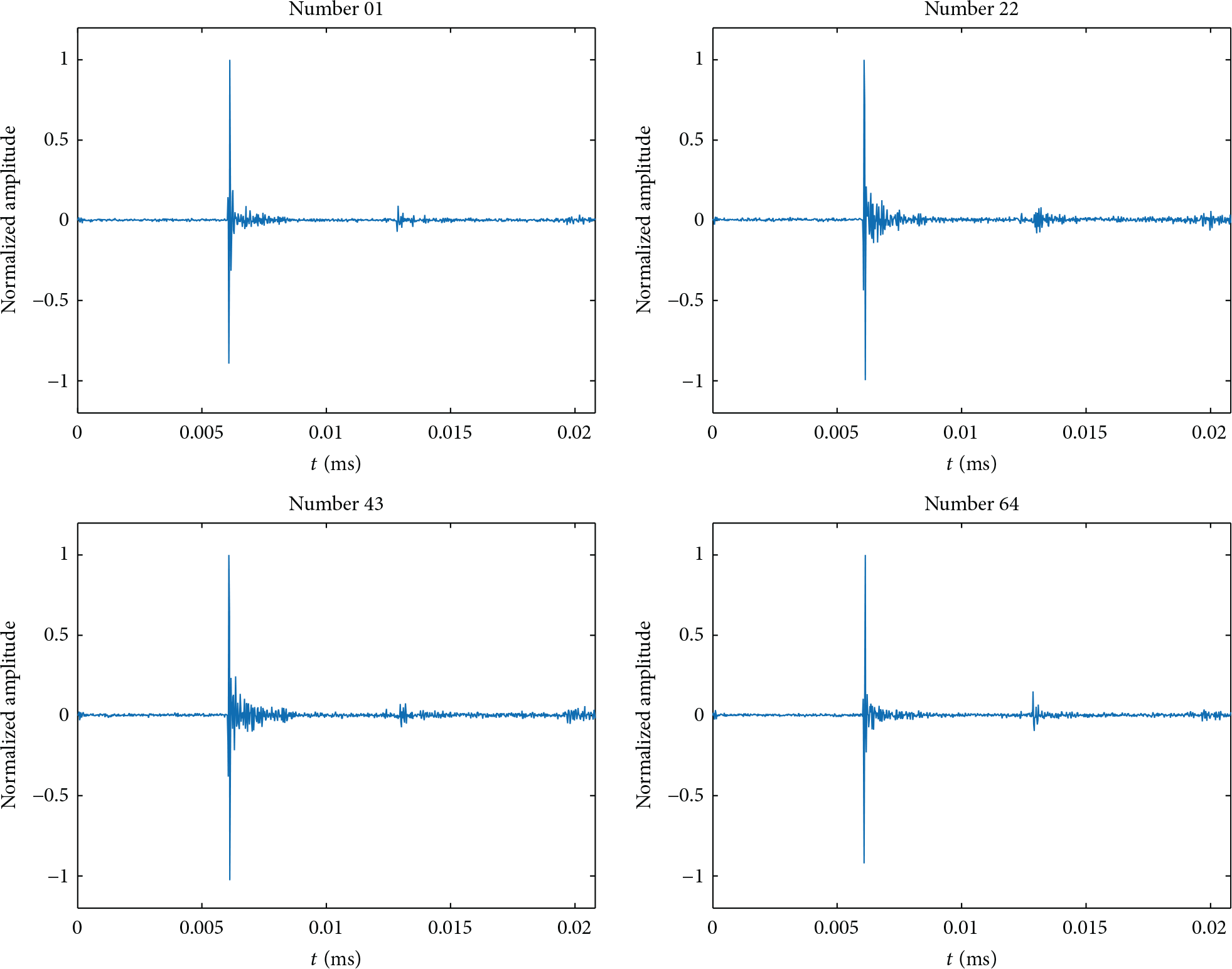
The length of transmitted signal in the experiment is 0.1 ms; ping rate is 2 Hz. The raw echo was collected during the experiment, and the raw echo signals of partial channels are shown in Figure 21.

The raw echo signals of partial channels.
The data from Songhua Lake were processed through the same processing method as the data acquired in the water tank; the comparisons of echo intensity and demodulation result between the conventional method and novel method are shown in Figures 22 and 23, respectively. It can be seen that the proposed method can effectively detect the underwater terrain when eliminating the tunneling effect.
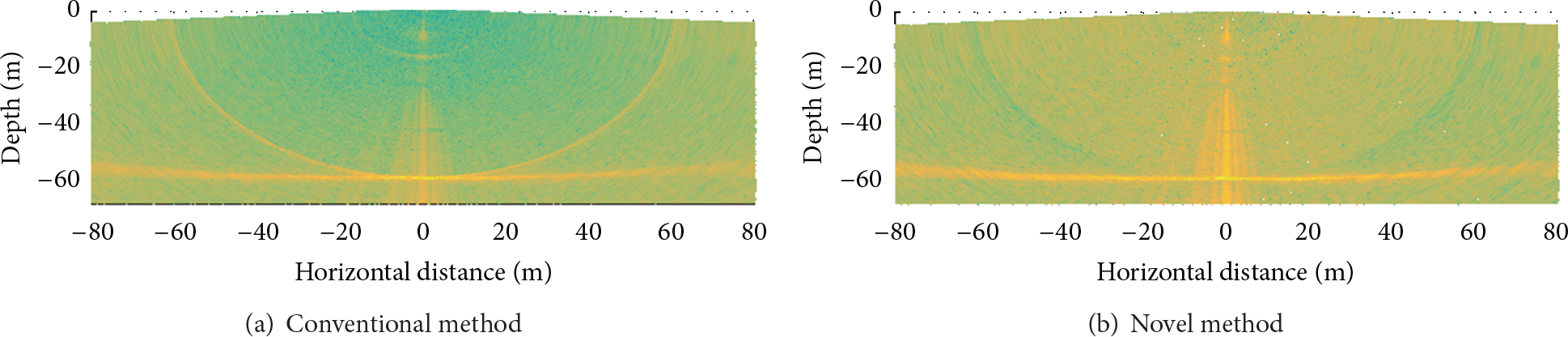
The echo intensity comparison between the conventional method and novel method.
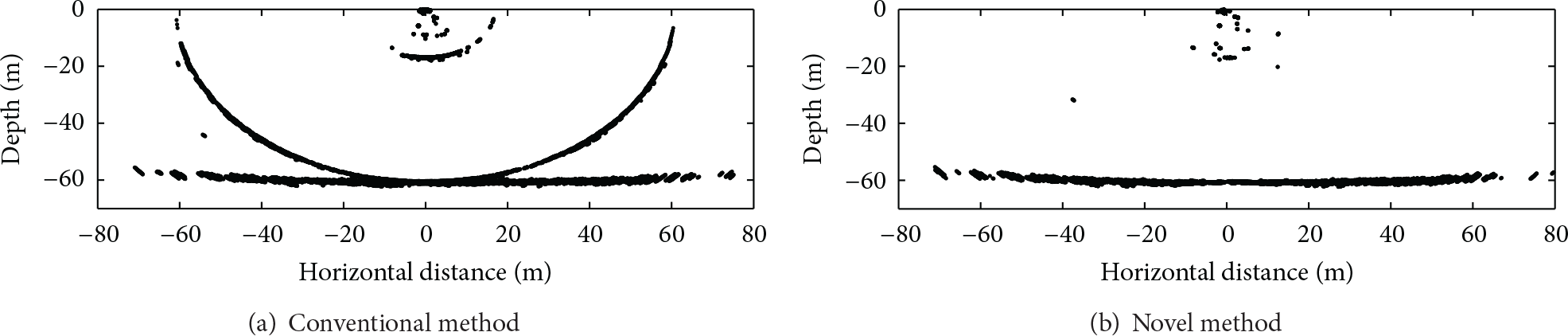
The comparison of demodulation results between the conventional method and novel method.
Three methods of K-FINDER, ADOS-CFAR, and ADOS-CFAR under loose k condition are applied to the standardization of the experimental data of Songhua Lake, and the average number of iterations and computational load are shown in Table 1, in which ADOS-CFAR under loose k condition needs less number of iterations and computational load.
The average number of iterations and computational load of the three methods.

The computational load in the demodulation between ABIS and ADOS-CFAR is compared (sliding window length, 1024; sliding times, 6176). The statistics show that the average single sliding computational load of ABIS is 1.0001 N, while that of the novel method is 0.3553 N. The actual signal is not a Gauss distribution, which causes the calculation speed to fail to reach the theoretical value. However, the result demonstrates that the method we proposed has an obvious function for calculation speed improvement.
6. Conclusion
In this paper, the ADOS-CFAR algorithm for multibeam seafloor terrain detection is proposed, and the following conclusions are proven: For the OS-CFAR detection without sliding window under Gauss white noise background, the computational speed of the proposed method is higher than that of K-FINDER. In the condition with a sliding window, the speed is higher than that of ABIS. The application of this method in multibeam seafloor terrain detection could eliminate tunnel effect efficiently with a decent computational speed. The fast calculation method proposed in this paper is not limited to OS-CFAR; it also has some reference value for the high-speed calculation of other sorting algorithms.
Footnotes
Competing Interests
The authors declare that they have no competing interests.
Authors' Contributions
Weidong Du, Tian Zhou, Baowei Chen, and Bo Wei contributed equally to this work.
Acknowledgments
This work was financially supported by the National Natural Science Foundation of China (Grant nos. 41327004, 41376103, and 41306038) and the Fundamental Research Funds for the Central Universities of China (Grant no. HEUCF160510).